
Как определить шим контроллер в блоке питания
Обновлено: 07.07.2024
Как нам уже известно из первых уроков, любой микроконтроллер умеет хорошо работать с цифровыми сигналами. Он легко справляется с арифметическими операциями над цифровыми данными, принимает и передаёт цифровые сигналы по линиям связи. А что значит «цифровые» в данном случае?
В самом первом уроке мы зажигали и гасили светодиод с помощью Ардуино. Для того, чтобы зажечь светодиод, мы подавали на его анод высокий уровень сигнала. А чтобы погасить — низкий уровень. Получается, для управления мы использовали только два уровня напряжения: высокий и низкий. Светодиод либо будет гореть, либо не будет. Третьего — не дано. Оперируя только двумя состояниями означает, что мы работаем с цифровым сигналом.
Но что делать, если нам нужно зажечь этот самый светодиод только на половину яркости? Или запустить двигатель, на 30% его мощности? Для решения этой задачи используют подход, называемый широтно-импульсной модуляцией сигнала. О том, что такое ШИМ и как это работает, мы узнаем на сегодняшнем уроке.
Широтно-импульсная модуляция — ШИМ
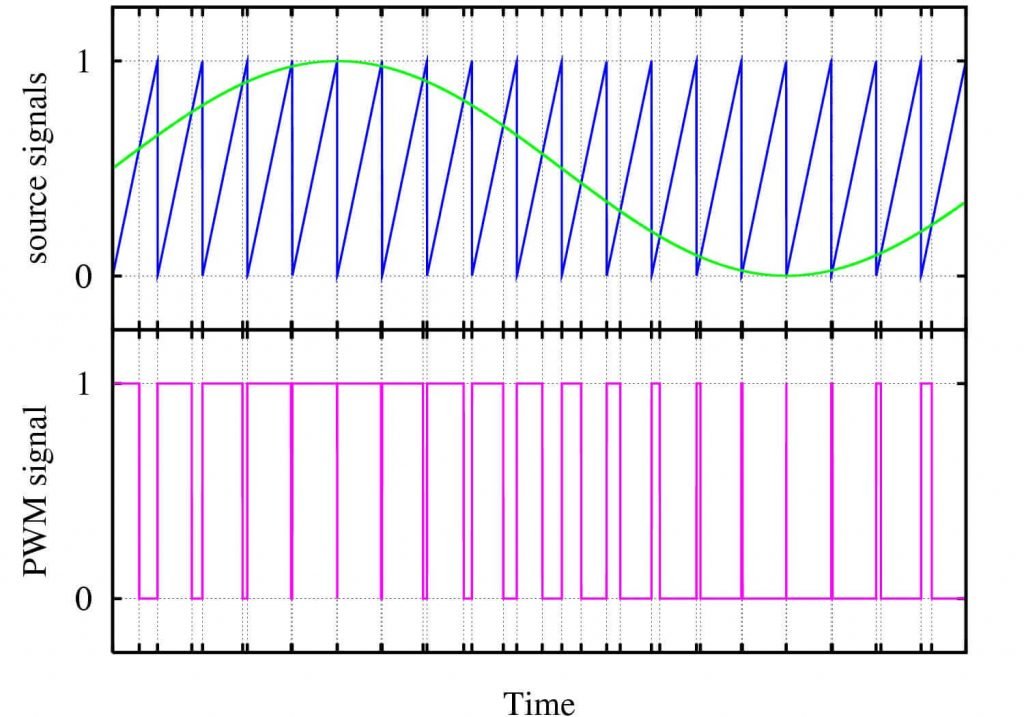
Разберем понятие ШИМ на примере управления скоростью вращения двигателя постоянного тока. Поставим своей целью запустить мотор на 50% от его максимальной скорости. Пусть наш двигатель идеальный и чтобы достичь заданной скорости, нам нужно в единицу времени передавать на мотор в два раза меньше мощности. Как это сделать, не меняя источник питания?
Проведем мысленный эксперимент (а кто-то может и натуральный — ничего сложного). Возьмём мотор постоянного тока с массивным маховиком, закрепленным на валу (таким маховиком может служить колесо). Подадим питание от аккумулятора и мотор начнет набирать обороты. Через какое-то время, мотор достигнет номинальной мощности, а его ротор максимальной скорости вращения. Отключим питание, и мотор постепенно начнет замедляться вплоть до полной остановки.
Следующий опыт. Снова включим мотор, и когда его скорость достигнет половины от максимальной — выключим. Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Разумеется, в силу человеческой медлительности, мотор будет удерживать заданную скорость с некоторой погрешностью. Другими словами, скорость будет «плавать» вокруг заданного значения. Чтобы минимизировать эти отклонения, нам потребуется увеличить частоту переключений. Тут уже не обойтись без автоматики.
А как заставить мотор вращаться медленнее или быстрее? Количество переданной мотору энергии будет зависеть от отношения времени когда мотор включен — tвкл к времени когда он выключен — tвыкл.

Так, для передачи мотору 50% мощности, tвкл будет равно tвыкл. Такой случай как раз изображен на графике. Чтобы мотор вращался еще медленнее, скажем с мощностью 25% от номинальной, придется время включения мотора уменьшить до этих самых 25% от общего периода управления T.

Таким образом, имея возможность менять ширину импульсов, мы можем достаточно точно управлять скоростью вращения мотора.
Собственно, рассмотренный способ управления мощностью и называется широтно-импульсной модуляцией сигнала, а сокращённо — ШИМ. Теперь рассмотрим параметры которые характеризуют ШИМ сигнал и которые следует учитывать при написании программ для микроконтроллеров.
Коэффициент заполнения (duty cycle)
Начнем с самого главного параметра — коэффициента заполнения D (он же duty cycle). Этот коэффициент равен отношению периода ШИМ сигнала к ширине импульса:
Пример ШИМ сигнала для разных значений D:

Чем больше D, тем больше мощности мы передаем управляемому устройству, например, двигателю. Так, при D = 1 двигатель работает на 100% мощности, при D = 0,5 — наполовину мощности, при D = 0 — двигатель полностью отключен.
Кстати, кроме коэффициента заполнения для характеризации ШИМ применяют и другой параметр — скважность S. Эти два параметра связаны выражением:
Скважность, как и коэффициент заполнения — величина безразмерная. В отличие от D, она может принимать значения от 1 до бесконечности. Но чаще всего, особенно в англоязычных источниках, используют именно D.
Частота ШИМ
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.
В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Плюс, общая проблема для всех случаев управления силовой нагрузкой — потери в цепях силовой коммутации (в транзисторах, и не только), которые увеличиваются с ростом частоты ШИМ. Чем больше частота, тем большее время транзисторы находятся в переходных состояниях, активно выделяя тепло и снижая эффективность системы.
Разрешение ШИМ
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
Проверка на материнской плате
Итак, при включении питания платы, срабатывает защита. В первую очередь, необходимо проверить мультиметром сопротивление плеч стабилизатора.
Для этих целей также может быть использован тестер радиодеталей. Если одно из них показывает короткое замыкание, то есть, измеренное сопротивление составляет меньше 1 Ома, значит, пробит один из ключевых полевых транзисторов.

Выявление пробитого транзистора в случае, если стабилизатор однофазный, не составляет труда – неисправный прибор при проверке мультиметром показывает короткое замыкание. Если схема стабилизатора многофазная, а именно так питается процессор, имеет место параллельное включение транзисторов. В этом случае, определить поврежденный прибор можно двумя путями:
- произвести демонтаж транзистора и проверить мультиметром сопротивление между его выводами на предмет пробоя;
- не выпаивая транзисторы, замерить и сравнить сопротивление между затвором и истоком в каждой из фаз преобразователя. Поврежденный участок определяется по более низкому значению сопротивления.
Второй способ работает не во всех случаях. Если пробитый элемент определить не удалось, придется все же выпаять транзистор.
Далее производится замена поврежденного транзистора, а также, установка на место всех выпаянных в процессе диагностики радиоэлементов. После этого можно попытаться запустить плату.
Первое включение после ремонта лучше выполнить, сняв процессор и выставив соответствующие перемычки. Если первый запуск был успешным, можно проводить тест с нагрузкой, контролируя температуру мосфетов.
Неисправности ШИМ контроллера могут проявляться так же, как и пробой мосфетов, то есть уходом блока питания в защиту. При этом проверка самих транзисторов на пробой результата не дает.
Кроме этого, следствием нарушения функций ШИМ контроллера может быть отсутствие выходного напряжения или его несоответствие номинальной величине. Для проверки ШИМ контроллера следует вначале изучить его даташит. Наличие высокочастотного напряжения в импульсном режиме, при отсутствии осциллографа, можно определить, используя тестер кварцев на микроконтроллере.
Тестирование ШИМ контроллера
Для тестирования контроллера будем использовать набор ячеек литиевых батарей с номинальным напряжением 80 В, которые применяются для данного электрического велосипеда. Контроллер временно подключен к аккумулятору и мотору, который прикреплен к велосипеду, чтобы приводить в движение заднее колесо. Поворачивая потенциометр по часовой стрелке, двигатель должен начать вращаться постепенно и увеличивать скорость, пропорциональную вращению ручки.
![]()
Чтобы проверить регулятор скорости на реальной нагрузке, надо смонтировать все на своем месте. Посмотреть как он держит нагрузку, вес, долгое время работы и воздействие атмосферной влажности (лучше покрыть плату лаком).
Признаки неисправности, их устранение
Перейдем к рассмотрению конкретных признаков неисправностей ШИМ контроллера.
Остановка сразу после запуска
Импульсный модулятор запускается, но сразу останавливается. Возможные причины: разрыв цепи обратной связи; блок питания перегружен по току; неисправны фильтровые конденсаторы на выходе.
Поиск проблемы: осмотр платы, поиск видимых внешних повреждений; измерение мультиметром напряжения питания микросхемы, напряжения на ключах (на затворах и на выходе), на выходных емкостях. В режиме омметра мультиметром надо измерить нагрузку стабилизатора, сравнить с типовым значением для аналогичных схем.

Импульсный модулятор не стартует
Возможные причины: наличие запрещающего сигнала на соответствующем входе. Информацию следует искать в даташите соответствующей микросхемы. Неисправность может быть в цепи питания ШИМ контроллера, возможно внутренне повреждение в самой микросхеме.
Шаги по определению неисправности: наружный осмотр платы, визуальный поиск механических и электрических повреждений. Для проверки мультиметром делают замер напряжений на ножках микросхемы и проверку их соответствия с данными в даташит, в случае необходимости, надо заменить ШИМ контроллер.

Проблемы с напряжением
Выходное напряжение существенно отличается от номинальной величины. Это может происходить по следующим причинам: разрыв или изменение сопротивления в цепи обратной связи; неисправность внутри контроллера.
Назначение выводов:
При подаче питания на вход VCC
контроллера поступает напряжение через резистор с диодного моста. Микросхема запускает процесс генерации импульсов. Дальнейшая подача питания происходит выпрямлением напряжения с нижней левой обмотки импульсного трансформатора.
Частота генерации микросхемы фиксированная. Она задается величиной резистора на входе RI
или конденсатора на входе
CT
.
Стабилизация напряжения устройства осуществляется за счет сравнения величины тока, протекающего через ключевой MOSFET-транзистор и напряжения обратной связи. Ток оценивается по величине падения напряжения на резисторе в цепи стока транзистора, который подключается к выводу SEN
. Напряжение обратной связи снимается с регулируемого стабилитрона TL431, проходит через оптопару и подается на вывод
FB
микросхемы. От значений напряжений на входах
SEN
и
FB
зависит величина скважности импульсов на выходе
OUT
.
Большинство из рассматриваемых здесь микросхем снабжены несколькими различными системами защиты, предотвращающими выход из строя при непредвиденных ситуациях:
- OVP
(Over Voltage Protection) — защита от превышения напряжения питания. При увеличении напряжения питания на входе
VCC
выше порогового значения (UOVP микросхема прекращает генерацию ШИМ-импульсов на выходе OUT). - UVLO
(Under Voltage Lockout) — триггер Шмитта, разрешающий работу контроллера при достижении напряжения питания на входе VCC значения UVLO on и запрещающей работу при падении напряжения до значения UVLO off. Значения этих напряжений указаны в заводской документации. - OLP
(Over Load Protection) — защита от перегрузки по току. - Некоторые микросхемы имеют вход BNO
(Brownout Protection Pin) — вход защиты от пониженного напряжения питания и импульсных помех на нем. Если напряжение на этом выводе ниже порогового микросхема прекращает генерацию ШИМ-импульсов на выходе
OUT
).
Существует группа ШИМ-контроллеров, включаемых по упрощенной
схеме. Напряжение обратной связи у них снимается с обмотки импульсного трансформатора, питающей микросхему. При таком включении стабильность выходного напряжения ниже, зато количество деталей блока питания намного меньше.
Таблица маркировки ШИМ-контроллеров в корпусе SOT23-6 (обычная маркировка).

Любой радиолюбитель, начинающий телемастер или электрик рано или поздно столкнётся с такой штукой, как ШИМ-контроллер. За рубежом он маркируется как PWM. Поэтому сегодня я хочу остановиться на вопросе что такое ШИМ-контроллер, как он работает и для чего нужен. Даже если Вы не планируете заниматься ремонтом электронной техники, всё равно эта статья будет интересна для общего ознакомления.
Там постоянное напряжение на входе преобразуется в импульсы прямоугольной формы, которые формируются с определенной частотой и с определённой скважностью. На выходе, с помощью управляющих сигналов, получается регулировать работу целого транзисторного модуля большой мощности. Таким образом разработчики получили блок управления напряжением регулируемого типа, который значительно меньше и удобнее старых, которые используют понижающий трансформатор, диодный мост и фильтр помех.
Главные плюсы ШИМ:
В Интернете Вы можете встретить ШИМ-контроллер на Arduino или NE555. Это не совсем контроллер, а скорее уже генератор ШИМ-импульсов, в которых нет возможности подключения цепи обратной связи. Такие устройства подходят больше для регуляторов напряжения, чем для обеспечения стабильного питания приборов, ведь они могут использоваться только для регулирования выходных параметров, но не для их стабилизации.
Стандартная схема ШИМ-контроллера, который используется в теле-, радио- и иной электронной аппаратуре, характеризуется наличием нескольких выходов.
Вывод RtCt – используется для подключения времязадающей RC-цепи, используемой для определения частоты ШИМ-сигнала.
Вывод RAMP – это ввод сравнения. Рабоает это так. На контакт подаётся пилообразное напряжение. Как только оно превышает значение напряжение на выходе усиления ошибки, вывод OUT появляется отключающий сигнал. Это основа ШИМ-регулирования.
Вывод CLOCK – тактовые импульсы. Используются для синхронизации между собой сразу нескольких ШИМ-контроллеров. В этом случае RC-цепь подключается только к ведущему контроллеру, RT ведомых соединяется с Vref, а CT ведомых соединяюся с общим.
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Широтно–импульсные преобразователи являются конструктивной частью импульсных блоков питания электронных устройств. Разберем, как проверить ШИМ контроллер с применением мультиметра, на примере материнской платы компьютера.

Проверка на материнской плате
Итак, при включении питания платы, срабатывает защита. В первую очередь, необходимо проверить мультиметром сопротивление плеч стабилизатора.
Для этих целей также может быть использован тестер радиодеталей. Если одно из них показывает короткое замыкание, то есть, измеренное сопротивление составляет меньше 1 Ома, значит, пробит один из ключевых полевых транзисторов.

Выявление пробитого транзистора в случае, если стабилизатор однофазный, не составляет труда – неисправный прибор при проверке мультиметром показывает короткое замыкание. Если схема стабилизатора многофазная, а именно так питается процессор, имеет место параллельное включение транзисторов. В этом случае, определить поврежденный прибор можно двумя путями:
-
произвести демонтаж транзистора и проверить мультиметром сопротивление между его выводами на предмет пробоя;
- не выпаивая транзисторы, замерить и сравнить сопротивление между затвором и истоком в каждой из фаз преобразователя. Поврежденный участок определяется по более низкому значению сопротивления.
Второй способ работает не во всех случаях. Если пробитый элемент определить не удалось, придется все же выпаять транзистор.
Далее производится замена поврежденного транзистора, а также, установка на место всех выпаянных в процессе диагностики радиоэлементов. После этого можно попытаться запустить плату.
Первое включение после ремонта лучше выполнить, сняв процессор и выставив соответствующие перемычки. Если первый запуск был успешным, можно проводить тест с нагрузкой, контролируя температуру мосфетов.
Неисправности ШИМ контроллера могут проявляться так же, как и пробой мосфетов, то есть уходом блока питания в защиту. При этом проверка самих транзисторов на пробой результата не дает.
Кроме этого, следствием нарушения функций ШИМ контроллера может быть отсутствие выходного напряжения или его несоответствие номинальной величине. Для проверки ШИМ контроллера следует вначале изучить его даташит. Наличие высокочастотного напряжения в импульсном режиме, при отсутствии осциллографа, можно определить, используя тестер кварцев на микроконтроллере.
Признаки неисправности, их устранение
Перейдем к рассмотрению конкретных признаков неисправностей ШИМ контроллера.
Остановка сразу после запуска
Импульсный модулятор запускается, но сразу останавливается. Возможные причины: разрыв цепи обратной связи; блок питания перегружен по току; неисправны фильтровые конденсаторы на выходе.
Поиск проблемы: осмотр платы, поиск видимых внешних повреждений; измерение мультиметром напряжения питания микросхемы, напряжения на ключах (на затворах и на выходе), на выходных емкостях. В режиме омметра мультиметром надо измерить нагрузку стабилизатора, сравнить с типовым значением для аналогичных схем.

Импульсный модулятор не стартует
Возможные причины: наличие запрещающего сигнала на соответствующем входе. Информацию следует искать в даташите соответствующей микросхемы. Неисправность может быть в цепи питания ШИМ контроллера, возможно внутренне повреждение в самой микросхеме.
Шаги по определению неисправности: наружный осмотр платы, визуальный поиск механических и электрических повреждений. Для проверки мультиметром делают замер напряжений на ножках микросхемы и проверку их соответствия с данными в даташит, в случае необходимости, надо заменить ШИМ контроллер.

Проблемы с напряжением
Выходное напряжение существенно отличается от номинальной величины. Это может происходить по следующим причинам: разрыв или изменение сопротивления в цепи обратной связи; неисправность внутри контроллера.
Поиск неисправности: визуальное обследование схемы; проверка уровней управляющих и выходных напряжений и сверка их значений с даташит. Если входные параметры в норме, а выход не соответствует номинальному значению – замена ШИМ контроллера.
Отключение блока питания защитой
При запуске широтно-импульсного модулятора, блок питания отключается защитой. При проверке ключевых транзисторов короткое замыкание не обнаруживается. Такие симптомы могут свидетельствовать о неисправности ШИМ контроллера или драйвера ключей.
В этом случае нужно произвести замер сопротивлений между затвором и истоком ключей в каждой фазе. Заниженное значение сопротивления может указывать на неисправность драйвера. При необходимости делается замена драйверов.
В далекие, теперь уже времена прошлого века, в блоках питания для понижения или повышения напряжения применялись линейные трансформаторы. Диодный мост и электролитический конденсатор сглаживал пульсацию. Далее напряжение стабилизировалось линейными или интегральными стабилизаторами. Вес таких источников питания был достаточно большой, ничуть не меньше были и габариты. Чем большая мощность требовалась от БП, тем в несколько раз был объемнее и тяжелее сам блок питания.
![]()
Преимущества и определения ШИМ-контроллера
ШИМ-контроллер это совокупность нескольких функциональных схем для того чтобы управлять выходными силовыми каскадами, собранными обычно на транзисторах. Управляются они исходя из той информации, которую микросхема ШИМ получает от выходных цепей. В зависимости от тока или выходного напряжения на выходе блока питания ШИМ-контроллер регулирует время открытия ключевого транзистора. Таким образом, получается замкнутый круг. Эта часть блока питания называется обратная связь или ОС.
В литературе и интернет источниках можно встретить случаи, когда ШИМ-контроллерами называют различные генераторы сигналов с регулировкой широты импульса, НО без обратной связи! К таким генераторам (на NE555 и др.) не совсем корректно применять понятие контроллер, скорее регулятор или генератор.
![]()
Характеристики ШИМ.
Для Широтно-модулированного сигнала характеристик всего две:
- Частота следования импульсов
- Скважность импульсов, или коэффициент заполнения. По сути это одно и то же. Разница лишь в обозначении: для скважности -это D, для заполнения используем литеру S. Коэффициент заполнения = единица / период сигнала T
Возьмем пример:
Частота сигнала = 50 кГц.
Период сигнала = 20 мкс.
Теперь предположим, что ключ выхода ШИМ открывается на 4 мкс. Коэффициент заполнение составит минус 20%, а скважность будет равна 5.
![]()
Конечно же, в расчет необходимо брать конструкцию ШИМ, исходя из количества силовых ключей.
Отличительные особенности импульсных и линейных БП.
Существенным преимуществом импульсных источников питания перед линейными является хороший КПД (около 90%)
Структура ШИМ
Давайте рассмотрим структуру любого ШИМ-контроллера. Хоть в своем огромном семействе разные ШИМ-ы и обладают дополнительными функциональными особенностями, но все же они все похожи.
Заглянув в микросхему, мы увидим полупроводниковый кристалл, в котором находятся следующие функциональные составляющие:
- Генератор последовательных импульсов.
- Источник опорного напряжения.
- Схема обратной связи (ОС), усилитель ошибки.
- Генератор прямоугольных импульсов, управляющий транзисторами, которые в свою очередь коммутируют силовые ключевые каскады.
Количество этих ключей, зависит от предназначения самого ШИМ-контроллера. Например, простые обратноходовые схемы построены на 1-м силовом ключе, полу мостовые на 2-х, а мостовые преобразователи на 4-х ключах.
![]()
![]()
На заметку:
Многие ШИМ-контроллеры совмещаются с силовыми ключами в один корпус. Если этот контроллер для маломощного блока питания, то выходные транзисторы устанавливаются прямо в микросхему контроллера.
Грубо говоря, ШИМ-контроллер представляет собой компаратор, на один из входов которого приходит сигнал обратной связи, на другой пилообразный сигнал генератора. Когда первый по амплитуде превышает второй, на выходе формируется импульс.
Тем самым ширина импульса на выходе зависит от соотношения входных сигналов. Предположим, что мы подключили более мощную нагрузку к выходу БП, и напряжение дало просадку. На обратной связи будет тоже падение. Что же произойдет?
В периоде сигнала начнет преобладать пилообразный сигнал, длительность импульсов на выходе увеличится и напряжение компенсируется. Происходит это все в доли секунды.
![]()
Частота работы генератора ШИМ-а задается RC-цепью
![]()
Давайте разберем назначение и название этих выводов:
Для того чтобы закрепить сказанное выше рассмотрим пару примеров использования ШИМ-контроллеров, а так же их схем включения. Сделаем это на примере микросхем:
Эти микросхемы часто используются в различных блоках питания, в том числе и компьютерных. Когда дело доходит до переделки компьютерного блока питания в лабораторный бп или зарядное устройство для аккумулятора, то, как раз стараются подобрать бп на TL494.
Обзор ШИМ TL494
Технические характеристики ШИМ-контроллера TL494
![]()
Ниже на рисунке дана распиновка TL494:
Обзор микросхемы UC3843
Рассмотрим назначение выводов:
Структура микросхемы UC3843
![]()
![]()
Можно заметить, что и эта микросхема тоже похожа на все остальные ШИМ-контроллеры.
![]()
Простой блок питания на UC3842
Микросхема ШИМ с силовым ключом в одном корпусе
Подобные ШИМ-контроллеры используются как в импульсных блоках питания на базе импульсного трансформатора, так и в DC-DC понижающих или повышающих преобразователях.
![]()
LM2596 включает в себя все технические решения, описанные выше, плюс в неё еще интегрирован силовой ключ на ток до 3 Ампер.
Структура микросхемы LM2596
![]()
Как можно увидеть больших отличий от микросхем, которые мы рассматривали ранее в ней нет.
Изучая ШИМ-контроллеры можно сделать несколько выводов: Если мы имеем дело с мощным источником питания и нам необходима достаточная гибкость использования этого контроллера, то такая микросхема как TL494 (и подобные) подходит для таких задач лучше. А если блок питания средней и невысокой мощности, то вполне свою роль выполнят ШИМ-контроллеры с интегрированными в них силовыми ключами. В таких бп нет больших требований к пульсациям и помехам, а выходные цепи можно сгладить фильтрами. Обычно это блоки питания для бытовой техники, светодиодных лент, ноутбуков, зарядных адаптеров.
И напоследок.
Читайте также: