
Как программировать процессор pic
Обновлено: 07.07.2024
Данные микроконтроллеры также являются очень известными, устанавливаются во многие устройства и давно уже снискали у радиолюбителей очень сильный интерес.
Разработчиком данного семейства является компания Microchip, которая также ялвяется очень известной и её продукция востребована по всему миру.
Изучение данной серии контроллеров является очень нелёгким вопросом, я этим заниматься начал уже давно, но нормально разобрался с линейкой только сейчас. Последнее время я немного ускорил процесс изучения микроконтроллеров PIC благодаря вашим просьбам в группах и чатах, на которые я не мог не откликнуться.
Также к тому, чтобы поделиться своими знаниями в области программирования данной линейки, меня подтолкнуло то, что я видел много блогов, уроков (в том числе и видео) очень хорошего качества по контроллерам PIC именно с использованием языка ассемблер. А вот на языке C уроков очень мало, что подчёркивает их востребованность.
Поэтому замечу, что программировать МК PIC мы будем именно на языке C. Какую мы выберем среду программирования и компилятор, мы решим чуть позже, а пока же в данном уроке нас ждёт краткое знакомство с самими контроллерами, с их архитектурой и их разновидностями.
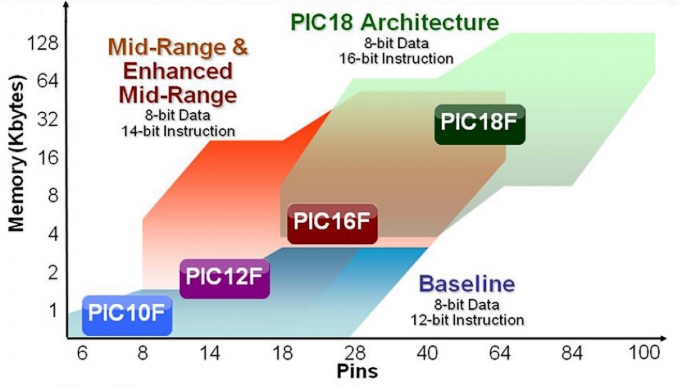
Разновидностями контроллеров мы будем считать их деление по архитектуре. Примем за основу разрядность их ядра.
Вот и контроллеры PIC также делятся по битности.
Данная линейка также делится на 3 семейства.
Вообщем, вот такие вот краткие характеристики существующих на данный момент контроллеров PIC. Если брать по наименованиям, то наименований очень много, на любой, как говорится, вкус.
Сначала посомтрим блок-схему контроллера на примере МК PIC16F84A (нажмите на картинку для увеличения изображения)

В левом верхнем углу сразу бросается в глаза модуль памяти FLASH, в которой обычно хранится программа контроллера (прошивка). А в правом верхнем углу мы видим память EEPROM, которая уже исользуется для хранения данных. Эти два вида памяти являются энергонезависимыми и после отклчения и сброса контроллера не стираются. Но данная память не является быстрой, поэтому код при старте программы распределяется уже в память RAM (ОЗУ), которая уже является быстродействующей и предназначена для функционирования контроллера при работе. Поэтому данную память мы уже рассмотрим несколько поподробнее.
Оперативная память контроллера PIC делится на память программ и память данных.
Вот так организована память программ у контроллера PIC16F84A

Микроконтроллеры данной серии имеют счётчик команд, способный адресовать 8К x 14 слов памяти программ и 14-разрядную шину данных памяти программ. Вся память программ разделена на 4 страницы по 2 килослов каждая (0000h-07FFh, 0800h-0FFFh, 1000h-17FFh, 1800h-1FFFh). Ну это общая информация, поэтому у тех контроллеров, у которых память небольшая перемещение между данными страницами приведёт к циклической адресации. Поэтому размер памяти того контроллера, который мы хотим программировать, мы обязаны знать твёрдо. В общем случае память программ состоит из счётчика команд, стека нескольких уровней, память для хранения векторов прерываний, а также внутренней памяти программ.
Также немного познакомимся с организации оперативной памяти, отведённой под хранение данных.
Память данных разделяется на регистры общего назначения и регистры специального назначения. Посмотрим, как организована память данных контроллера PIC16F84A
Также из приведённого выше рисунка мы видим, что у нашего контроллера память данных разделена на 2 страницы (или банка) переход между которыми осуществляется посредством установки определённых битов в регистре STATUS. Поэтому данный регистр присутствует в обеих банках и обратиться к нему мы можем в любой момент, чтобы сменить текущую страницу памяти.
Адресация может быть как прямая, так и косвенная или относительная, когда адрес отсчитывается относительно текущего адреса. С этим мы возможно не будем знакомиться, так как такая задача возникает у программистов, которые пишут программы на ассемблере.

Тактирование МК PIC также может осуществляться как от внешнего генератора, так и от кварцевого резонатора, от внутреннего резистора, а также существует ещё несколько вариантов, которые поддерживают не все контроллеры данного семейства. На практике как правило используется тактирование от кварцевого резонатора. Скорее всего, мы также последуем данной традиции в наших дальнейших занятиях.
Думаю, на этом мы закончим знакомство с контроллерами PIC. Знакомство получилось кратким, но на первое время нам и этого хватит за глаза. С более расшифрованной информацией мы столкнёмся, когда будем сочинять наши программы. Так что ждите следующих занятий, которые обещают быть очень интересными. Мы познакомимся сначала с установкой среды и компилятора, изучим, как с ними работать, какие тонкости программирования присутствуют в настройках различной периферии, а также в работе с ней.
Микроконтроллеры PIC для начинающих
На современном рынке есть ряд семейств и серий микроконтроллеров от разных производителей, среди них можно выделить AVR, STM32 и PIC. Каждое из семейств нашло свою сферу применения. В этой статье я расскажу начинающим о микроконтроллерах PIC, а именно, что это такое и что нужно знать для начала работы с ними.

Что такое PIC
PIC – это название серии микроконтроллеров, которые производятся компанией Microchip Technology Inc (США). Название PIC происходит от Peripheral Interface Controller.
Микроконтроллеры PIC имеют RISC-архитектуру. RISC – сокращённый набор команд, используется также в процессорах для мобильных устройств. Есть целый ряд примеров её использования: ARM, Atmel AVR и другие.
Компания Microchip в 2016 году купила Atmel – производителя контроллеров AVR. Поэтому на официальном сайте представлены микроконтроллеры семейства и PIC и AVR.

Семейства
Baseline (PIC10F2xx, PIC12F5xx, PIC16F5x, PIC16F5xx) ;
Mid-range (PIC10F3xx, PIC12F6xx, PIC12F7xx, PIC16F6xx, PIC16F7xx, PIC16F8xx, PIC16F9xx) ;
Enhanced Mid-range (PIC12F1xxx, PIC16F1xxx) ;
High-end или PIC18 (18Fxxxx, 18FxxJxx and 18FxxKxx).
Характеристики, которых приведены в таблице ниже.
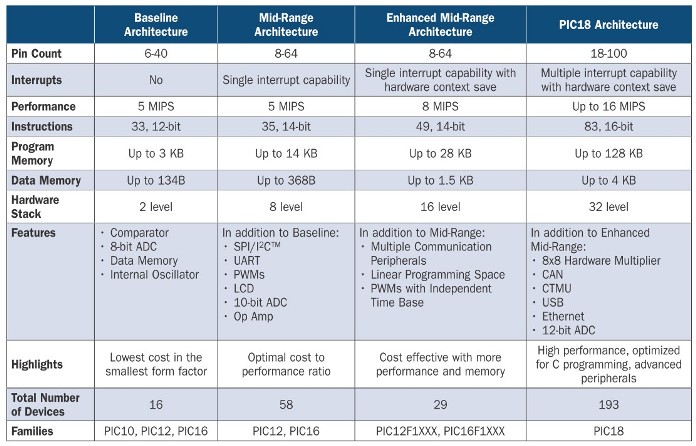
Кроме 8 битных микроконтроллеров компания Microchip производит 16-битные:
DsPIC30/33F для обработки сигналов.
Представители 16-битного семейства работают со скоростью от 16 до 100 MIPS (выполнено миллионов инструкций в секунду). Стоит отметить и особенности:
машинный цикл – 2 такта;
разрядность АЦП – 16 бит;
поддерживают ряд протоколов связи (UART, IrDA, SPI, I2S™, I2C, USB, CAN, LIN and SENT), ШИМ и прочее.
Также есть семейство 32 битных микроконтроллеров – PIC32MX, основные особенности:
работают на частоте до 120 мГц;
выполняют до 150 MIPS;
АЦП: 10-бит, 1 Msps (скорость квантования), до 48 каналов.
С какого PIC начать?
Одним из популярнейших в среде радиолюбителей микроконтроллеров является PIC16f628A. Его технические характеристики такие:
Есть встроенный тактовый генератор. Вы можете настроить для работы с частотой 4 или 8 МГц;
18 пинов, из них 16 – ввод/вывод, а 2 – питание;
Для работы на частотах до 20 МГц можно подключить кварцевый резонатор, но в этом случае на ввод/вывод останется не 16, а 14 ног;
В маркировке есть буква F, это значит, что используется FLASH-память, объёмом в 2048 слов;
14-битные инструкции, 35 штук;
4 аналоговых входа;
На входах PORTB есть подтягивающие резисторы;
Машинный цикл – 4 такта кварцевого резонатора или внутреннего генератора);
128 байт EEPROM;
USART – последовательный порт;
внутренний источник опорного напряжения;
питается от 3.3 до 5 В.
Причинами популярности является низкая цена и возможность тактирования от внутреннего генератора.
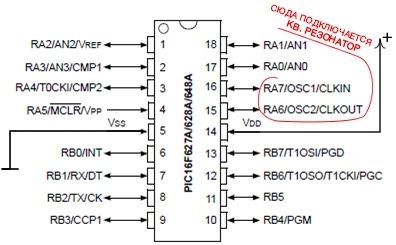
Какая цоколевка у 16f628 изображено ниже:

Блочная внутренняя схема этого микроконтроллера изображена ниже.

Научитесь разрабатывать устройства на базе микроконтроллеров и станьте инженером умных устройств с нуля: Инженер умных устройств
На что следует обратить внимание на схеме в первую очередь?
У этого микроконтроллера есть два порта PORTA и PORTB. Каждый пин, каждого из них может использоваться как вход и выход, а также для подключения периферии или задействования других модулей микроконтроллера.
Рассмотрим эту часть схемы крупно.

Например, порты RB0-RB3 – могут выступать в роли аналоговых. К RA6, RA7 в случае необходимости подключается источник тактирования (кварцевый резонатор). Сами же выводы микроконтроллера настраиваются в режим входа/выхода с помощью регистра TRIS.
Для этого есть команды типа:
TRISA = 0; // Все выводы порта А устанавливаются как выходы
TRISB = 0xff; // Все выводы порта B назначаются как входы
TRISA0 = 1; // Так назначается отдельный пин как вход (1) или выход (0)
TRISA5 = 1 ; // здесь 5 вывод порта А – назначен входом
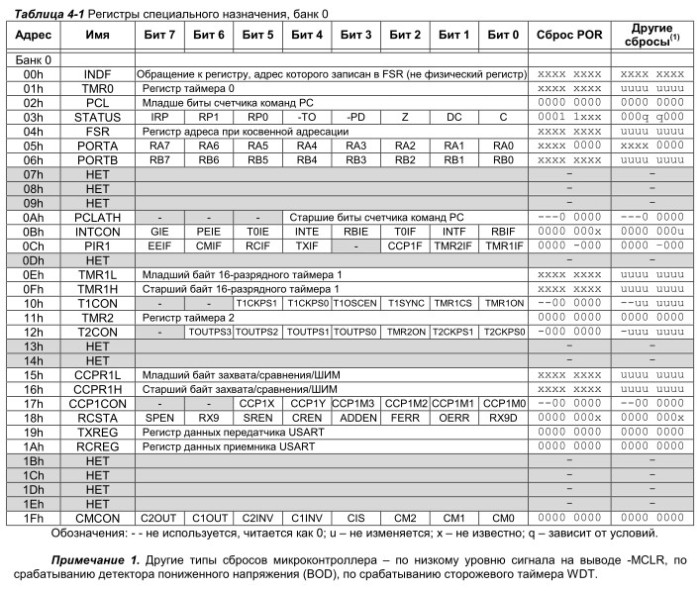
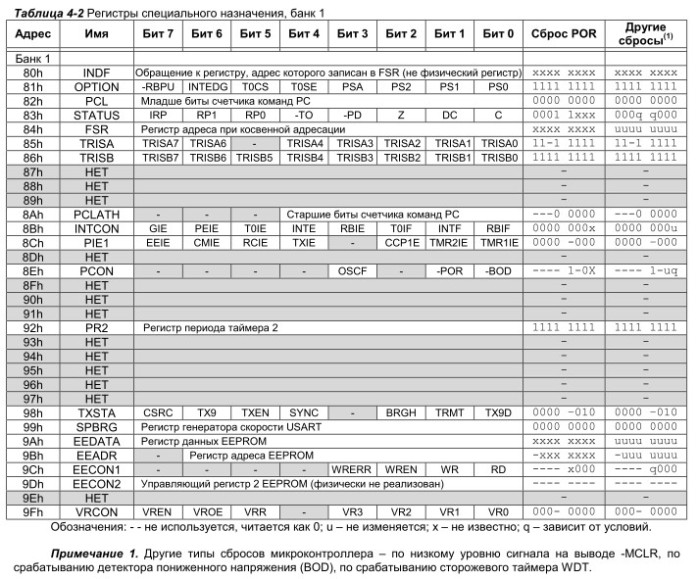
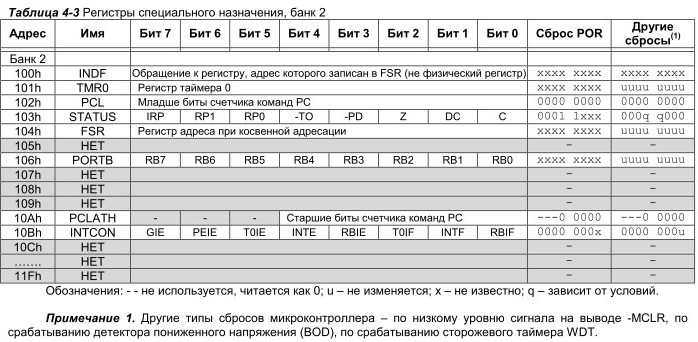
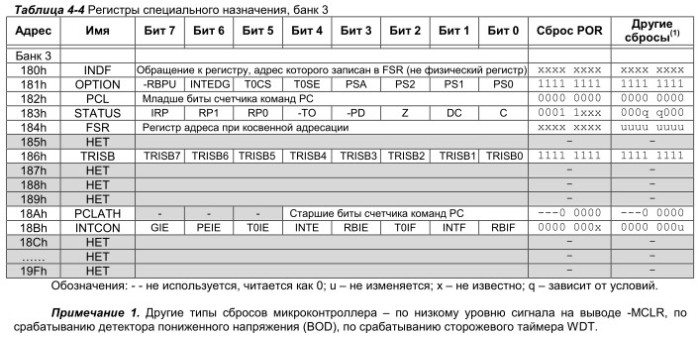
Вообще режимы работы, включение WDT (сторожевого таймера) выбор источника тактирования микроконтроллера и прочее настраивается с помощью регистров специального назначения — SFR, а память и данные хранятся в GFR – простыми словами это статическое ОЗУ.
Для удобства ниже приведены эти таблицы в виде картинок (нумерация регистров, как и всё в цифровой электронике начинается с 0, поэтому номер четвертого – 3).
Как подключить и на каком языке программировать?
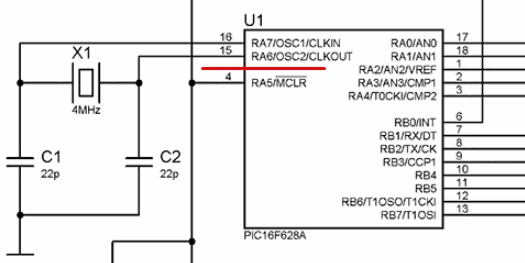
Чтобы запустить этот микроконтроллер достаточно подать плюс на Vdd и минус на Vss. Если нужен кварцевый резонатор, то он подключается к выводам 16 и 15 (OSC1 и OSC2) микроконтроллера PIC16f628, для других контроллеров с большим или меньшим числом выводов – смотрите в datasheet. Но этот момент нужно указывать при программировании и прошивке.
Кстати о переносимости и совпадении цоколевки – на 16f84A – она аналогична, и на многих других.
Фрагмент схемы с подключенным к pic16f628a внешним резонатором:
Есть два основных языка для программирования микроконтроллеров PIC – это assembler и C, есть и другие, например PICBasic и т.д. Еще можно выделить упрощенный язык программирования JAL (just another language).
Для примера ниже приведена программа для «мигания светодиодом» — своего рода «Hello World» для микроконтроллера PIC на языке C.

В 1 строке подключается библиотека микроконтроллеров PIC, далее подключается библиотека программы задержки.
В функции main(void) в начале устанавливаются начальные параметры, подобно тому как мы это делали в функции Void setup () – в статьях об ардуино. Далее в строках 11-16 объявляется бесконечный цикл while(1), в ходе которого и выполняется программа «мигания светодиодом».
В примере состояние порта постоянно инвертируется, т.е. если он был в «0», то перейдет в «1» и наоборот. На C для PIC есть следующие команды управления команды:
PORTA = 0; // переводит все пины порта А в низкий уровень (лог. 0)
PORTB = 0xff; // переводит все пины порта B в высокий уровень (лог. 1)
RB5 = 1; // На пятом выводе порта B высокий уровень
А так выглядит та же программа, но уже на языке JAL, я перевел на русский язык комментарии от разработчиков встроенных примеров в JALedit (среда разработки).
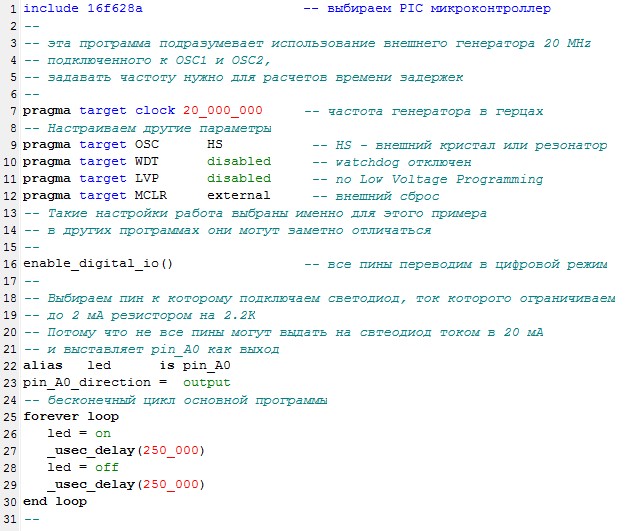
Возникает соблазн выбрать JAL, и вам он может показаться проще. Безусловно на нём можно реализовать любые проекты, но с точки зрения пользы для вас как для специалиста – это бесполезный язык. Значительно больших результатов вы добьетесь, изучая синтаксис и принципы программирования на языке C (большая часть популярных сейчас языков C-подобны) или на Assembler – это низкоуровневый язык, который заставит вас понимать принцип работы устройства и что происходит в программе в каждый конкретный момент времени.
В чем работать
Если сказать совсем обобщенно для работы с любыми микроконтроллерами нужно:
1. Текстовый редактор.
3. Программа для загрузки прошивки в микроконтроллер.
И я даже читал старые учебники, где автор, работая из-под DOS писал код, компилировал и прошивал его разными средствами. Сейчас же под все популярные операционные системы есть среды для разработки, как узкоспециализированные (для конкретного семейства микроконтроллеров или семейств от одного производителя) так и универсальные (либо содержат все необходимые инструменты, либо они подключаются в виде плагинов).
Например, в цикле статей об Arduino мы рассматривали среду Arduino IDE в ней же мы и код писали и с её помощью «заливали» прошивку в «камень». Для микроконтроллеров PIC есть такие программы, как:
MPASM — используется для разработки на языке Assembler от фирмы Microchip ;
MPLAB — также IDE от Microchip для PIC-контроллеров. Состоит из множества блоков для тестирования, проверки, работы с кодом и компиляции программ и загрузки в микроконтроллер. Также есть версия MPLAB X IDE – отличается большим функционалом и построена на базе платформы NetBeans ;
MikroC — универсальная среда (не только для ПИКов) для разработки. Как видно из названия «заточена» под программирование на C, а также есть такие программы как MikroBasic и MikroPascal, для соответствующих языков ;
JALedit — подходит для языка JAL, о котором мы упоминали выше ;
И ряд других менее известных.
Как прошивать микроконтроллер?
Для PIC-микронотроллеров есть ряд программаторов. Официальным считается PICkit. Их 4 версии. Но можно прошивать и универсальными, например, TL866 (он поддерживает почти всё, что может понадобится начинающему радиолюбителю, при этом очень дешевый).

Также в сети есть ряд различных схем программаторов для ПИКов, как для работы через COM-порт:
Так и через USB (на самом деле тоже com, только через преобразователь на ИМС MAX232).
Заключение
Микроконтроллеры PIC16 подходят для простых проектов, типа простой автоматики, вольтметров, термометров и прочих мелочей. Но это не значит, что нельзя делать на этом семействе сложные и большие проекты, я привел пример того для чего чаще всего их используют. Для общего представления рекомендую посмотреть несколько видео:
В одной статье рассматривать темы о том, как программировать микроконтроллеры, неважно какого семейства, безсмысленно. Поскольку это очень большой объём информации. Для начинающих советую к прочтению:
Катцен С. — PIC-микроконтроллеры. Все что вам необходимо знать;
Кёниг А. — Полное руководство по PIC микроконтроллерам;
Шпак Ю.А. — Программирование на языке С для AVR и PIC микроконтроллеров;
Магда Ю.С. — Микроконтроллеры PIC: архитектура и программирование;
Яценков В.С. — Микроконтроллеры Microchip. Практическое руководство.
Любите умные гаджеты и DIY? Станьте специалистом в сфере Internet of Things и создайте сеть умных гаджетов!
Записывайтесь в онлайн-университет от GeekBrains:

Изучить C, механизмы отладки и программирования микроконтроллеров;
Получить опыт работы с реальными проектами, в команде и самостоятельно;
Получить удостоверение и сертификат, подтверждающие полученные знания.
Starter box для первых экспериментов в подарок!
После прохождения курса в вашем портфолио будет: метостанция с функцией часов и встроенной игрой, распределенная сеть устройств, устройства регулирования температуры (ПИД-регулятор), устройство контроля влажности воздуха, система умного полива растений, устройство контроля протечки воды.
Вы получите диплом о профессиональной переподготовке и электронный сертификат, которые можно добавить в портфолио и показать работодателю.

Общий взгляд на устройства ПЛК
Системы на базе микропроцессора (микроконтроллеры) выступают в качестве программируемых электронных устройств, для которых специально разработаны языки программирования.
Благодаря таким языкам программирования, существенно облегчается процесс программирования контроллеров. Язык высокого уровня, созданный для ПЛК, обеспечивает простоту, эффективность и дружелюбную среду для пользователя.
- память,
- входные порты,
- выходные порты.
В свою очередь, микроконтроллер представляет собой интегральную схему, в составе которой присутствуют:
- микропроцессор,
- память программ и данных,
- генератор тактовых импульсов,
- интерфейсы ввода и вывода,
- таймеры,
- аналого-цифровые преобразователи,
- внешние коммуникационные порты и другие схемы.

Микроконтроллеры используются в составе современной электроники повсеместно. Умение выполнять программирование микроконтроллеров открывает широкие горизонты
Эффективность программы на основе макросов столь же эффективна, как и запись программы на языке «C». Компилятор отвечает за создание соответствующих подстановок для генерации кода, который передаётся в память программы микропроцессора или микроконтроллера.
Программирование микроконтроллеров PIC 12 / PIC 16
Программирование микроконтроллеров PIC выполняется с использованием проприетарного последовательного протокола. Поэтому конечному пользователю недостаточно просто взять и подключить микросхему контроллера PIC напрямую к любому «стандартному» интерфейсу.
Однако технические требования относительно программирования по времени достаточно слабы. Этот фактор даёт возможность использовать некоторые выводы параллельного или последовательного порта компьютера для генерации программной последовательности с помощью программного обеспечения.
Помимо рабочего напряжения, микроконтроллерам требуется ещё три сигнала:
- Программируемое напряжение (около 13В).
- Таймер программирования (ICSPCLK).
- Данные (ICSPDAT).
Поскольку большинство выпускаемых экземпляров PIC допускают программируемое напряжение несколько ниже значения, указанного спецификацией, открывается возможность использования уровней сигналов ± 12В, присутствующих на интерфейсе последовательного порта настольного ПК.
Таким образом, «записать» PIC вполне допустимо без необходимости подключения дополнительного источника питания. Преобразование уровней допускается выполнять при помощи нескольких компонентов. Однако представленная ниже упрощённая схема, обладает некоторыми ограничениями.
В частности, позволяет считывать и программировать непосредственно PIC устройства. Нет никакой гарантии, что эта схема способна обеспечить программирование всех контроллеров, поскольку не соответствует полной спецификации программирования.

Схема принципиальная упрощённого программатора микроконтроллеров серии PIC и обозначенные линии подключения интерфейсов RS232 / ISSP
Внутрисхемное программирование микроконтроллеров PIC
Разъём внутрисхемного программирования (ICSP) предоставляет возможность запрограммировать микроконтроллер непосредственно в рамках прикладной схемы.
Применение разъёма ICSP позволяет избежать рисков при перемещении микроконтроллера PIC между различными гнездами (например, в случае изгиба контактов или воздействия на микроконтроллер электростатических разрядов). Также работа с разъёмом ICSP обеспечивает экономию времени.

Вот такой вариант ICSP соединителя вполне подойдёт для подключения линий связи на случай выполнения программирования микроконтроллера серии PIC12/PIC16
Следует внимательно использовать интерфейс и кабель ICSP, принимая во внимание, что схема не должна нарушать ход сигналов программирования. Другими словами – точное соответствие месту назначения сигналов необходимо выполнять безукоризненно.
Основные условия программирования:
- время переключения напряжения программирования «0 – 13В» составляет несколько микросекунд;
- полный размах напряжения сигналов таймера и данных достигается в течение одной микросекунды;
- вывод сигнала PGM остаётся низким всё время программирования.



Рекомендации относительно процедуры программирования
Не рекомендуется подключать активные цепи к линии внешнего (основного) сброса (MCLR – Microcontroller Line Reset). Если сигнал MCLR используется для сброса PIC, следует устанавливать резистор номинальным сопротивлением более 56 кОм между выводами MCLR и подачи напряжения питания.
Сигнальные выводы программирования должны исключать наличие индуктивной или ёмкостной нагрузки. Когда рабочее напряжение питания берётся от модуля программатора, требуется изолировать вывод питания PIC от остальной части прикладной схемы в процессе программирования.

Схемные доработки программатора микроконтроллера, рекомендуемые с целью обеспечения более качественного процесса программирования устройства
Этот вариант может иметь место, если схема содержит собственный стабилизатор напряжения питания и оснащается развязывающим конденсатором большой ёмкости. Модуль программатора, предназначенный под напряжение питания 3,3В, не в состоянии заряжать конденсатор достаточно быстро, а для программирования PIC требуется не менее 4,5В.
Между тем вариант изолирования можно исключить, если в схеме используется диод Шоттки. Чтобы удерживать вывод перевода микроконтроллера в режим программирования (PGM) на низком уровне, рекомендуется подключать этот вывод к земле через резистор номиналом от 2,2 кОм до 10 кОм.
Всегда рекомендуется таймер включения питания вносить в «слово» конфигурации. Задержка таймера более 40 мс даёт достаточно времени для стабилизации напряжения питания перед началом любой операции. Такой шаг позволяет избежать непреднамеренного выполнения программы до входа в режим программирования.
Для обеспечения повторного программирования микроконтроллера PIC в условиях напряжения питания ниже 4,5В, область памяти необходимо отключить от защиты. Это обусловлено применением «Chip Erase», единственного способа удаления кода или защиты данных, которого требуют практически все микроконтроллеры PIC с напряжением питания выше 4,5В.
Сигналы ICSP соответствующие контактам PIC 12Fxxx / 16Fxxx
Число ниже аббревиатуры сигнала соответствует выходу разъема ICSP модуля программатора. Для использования модуля с тестовыми платами сторонних производителей требуется адаптер.

Следует обратить внимание: разъём ICSP этого модуля программатора имеет различный порядок сигналов по сравнению с другими программаторами микроконтроллеров PIC
Следующие схемы показывают, как подключать сигналы программирования к микроконтроллерам PIC 12Fxxx / 16Fxxx:

Схемы, определяющие порядок подключения сигнальных проводников, участвующих в процедуре чтения/записи данных микроконтроллеров разной конфигурации
Программирование микроконтроллеров + фирменные средства
Существует солидная группа фирменных программаторов для микроконтроллеров семейства PIC. Наиболее известные аппаратные средства:
Характерные отличия отмеченных программаторов – устройства обладают не просто классическими функциями чтения/записи. Фирменным программаторам присущ целый ряд расширенных функций, включая полный контроль содержимого памяти и стёка.
На основе информации: Uolsinectis
КРАТКИЙ БРИФИНГ
Итак, вы решили научиться программировать pic-контроллеры. Для начала поговорим о том, что вам для работы с этими контроллерами понадобится.
В описании на русском языке про всё рассказано: от установки и настройки до удаления. В большинстве случаев вся установка заключается в том, чтобы запустить setup и ответить на пару вопросов, типа куда ставить драйверы и тому подобное, от себя лишь добавлю, что во избежание глюков ставить пакет надо в такую папку, чтобы в пути были только английские буквы (а не в какую-нибудь, типа C:\Программы\PIC\MPLAB). Вообще, кириллицу в путях к файлам или в названиях файлов лучше не использовать, иначе возможны глюки.
MPLAB позволяет писать программы на двух языках: СИ и Ассемблер. Интернет просто ломится от разборок СИ-шников и ассемблерщиков, которые с пеной у рта доказывают друг другу, какой язык лучше. Я отношу себя к ассемблерщикам, поэтому, естественно, расскажу почему лучше именно Ассемблер.
Ассемблер представляет собой набор элементарных команд, выполняемых контроллером. Каждая команда трактуется в машинный код совершенно однозначно, а результат её выполнения и время выполнения всегда одинаковы. То есть, если вы имеете листинг на ассемблере, то вы можете совершенно точно сказать, что делает контроллер в каждый момент времени и каким именно образом достигается нужный результат.
Короче говоря, в случае с языком высокого уровня вы изучаете как какой-то дядя обозвал свои способы реализации необходимых вам функций и по каким правилам их надо записывать. В данном случае можно провести следующую аналогию: вы хотите поговорить с китайцем, но вам говорят: "Китайский слишком сложный язык, но есть один дядя в Болгарии, который 20 лет жил в Китае и отлично его выучил. А болгарский язык с русским очень похожи и русскому человеку он интуитивно понятен, так что выучите болгарский, а уж дядя переведёт."
В случае с ассемблером, вы изучаете сам контроллер и правила, по которым надо разговаривать с контроллером. При этом контроллер имеет всего-то несколько десятков команд, которые умещаются на одном листке и их легко можно окинуть одним взглядом.
Надеюсь, к этому моменту вы уже сделали выбор языка программирования, так что пойдём дальше.
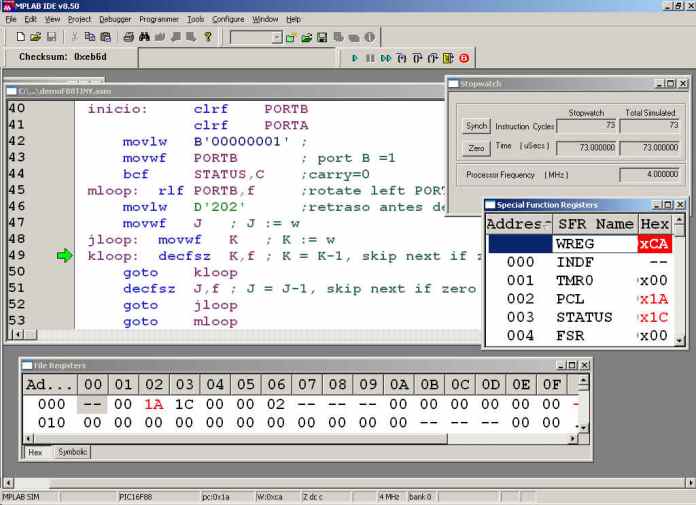
Итак, мы установили MPLAB, хотим написать в нём программу для контроллера и получить готовую прошивку.
В появившемся окошке, в проводнике справа, выбираем нашу папку, в левой части (в поле под надписью File Name) пишем название будущего проекта, например my1.pjt (не забываем указать расширение), и жмём ОК.
Открывается окошко с названием Development Mode, в котором мы видим кучу вкладок. На вкладке Tools ставим галочку рядом с MPLAB SIM Simulator (грех для отладки симулятором не пользоваться), в поле ввода Processor выбираем контроллер, с которым мы будем работать. На вкладке Clock указываем какая у нас будет частота генератора. Жмём ОК. На ошибку и предупреждение не обращаем внимания, это просто нам говорят, что пока не могут создать .hex (ну правильно, у нас пока и программы нет) и что при изменении настроек надо заново перекомпилировать проект (так мы ещё вообще ни разу не компилировали).
В поле ввода Language Tool Suite выбираем Microchip.
Вот и всё! Теперь осталось только набрать в окошке редактора текст программы, скомпилировать проект (меню Project->Build All) и, если в программе нет ошибок (что с первого раза бывает очень редко), то в папке проекта появится готовая прошивка (файл с расширением hex), которую можно заливать в контроллер.

Далее просверлил отверстия и начал паять детали. Самой большой проблемой были стабилитроны. Стабилитроны стал искать на плате от ЭЛТ-монитора. Подписаны на плате они как ZD (Zener Diode). Естественно маркировка у них непонятная и неизвестно где и как искать. Чтобы определить, на сколько вольт стабилитрон можно собрать простую схемку.

Вольтметр достаточно точно покажет, на сколько вольт стабилитрон. Таким нехитрым способом нашел приблизительные по номиналу стабилитроны. Вместо 5,6В установил 6,2В, вместо 12,6В поставил 2 стабилитрона последовательно 6,2+6,2=12,4В.

Транзистор можно поставить КТ315. У себя поставил С945. Диоды тоже любые, я выпаял все 3 шт. из диодного моста той-же платы от монитора. Номинал конденсаторов также не критичен, но их поставил по номиналу.
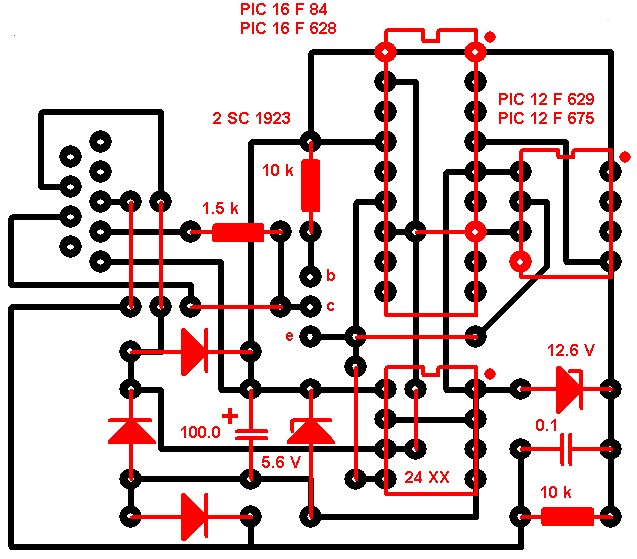
Немного про красные пятачкИ у панелек. Эти ноги вообще не паяются у панелек. Полностью готовый девайс выглядит так:

Панельки решил не все паять, т.к. мне нужно было прошить только PIC16F628А. После того как спаял нужно настроить программу. Прошивать мы будем IC-Prog. Скачиваем программу, распаковываем из архива, все файлы должны быть обязательно в одной папке!
1) Если вы пользуетесь Windows NT, 2000 или XP, то правой кнопкой щёлкните на файле icprog.exe. "Свойства" >> вкладка "Совместимость" >> Установите "галочку" на "Запустить программу в режиме совместимости с:" >>
выберите "Windows 2000".
2) Запускаем программу. Если она уже на русском - ничего не нужно, переходите к шагу 3 .
Если программа на английском, то жмите "Settings" >> "Options" >> вкладку "Language" >> установите язык "Russian" и нажмите "Ok".
Согласитесь с утверждением "You need to restart IC-Prog now" (нажмите "Ok"). Оболочка программатора перезапустится.
3) Теперь нужно настроить программатор. Кликайте "Настройки" >> "Программатор". Проверьте установки, выберите используемый вами COM-порт, нажмите "Ok".

Для очень "быстрых" компьютеров возможно потребуется увеличить параметр "Задержка Ввода/Вывода". Увеличение этого параметра увеличивает надёжность программирования, однако, увеличивается и время, затрачиваемое на программирование микросхемы.
4) Только для пользователей Windows NT, 2000 или XP. Нажмите "Настройки" >> "Опции" >> выберите вкладку "Общие" >> установите "галочку" на пункте "Вкл. NT/2000/XP драйвер" >> Нажмите "Ok" >> если драйвер до этого не был устновлен на вашей системе, в появившемся окне "Confirm" нажмите "Ok" . Драйвер установится, и оболочка программатора перезапустится.
5) Нажмите снова "Настройки" >> "Опции" >> выберите вкладку "I2C" >> установите "галочки" на пунктах: "Включить MCLR как VCC" и "Включить запись блоками". Нажмите "Ok".
6) "Настройки" >> "Опции" >> выберите вкладку "Программирование" >> снимите "галочку" с пункта: "Проверка после программирования" и установите "галочку" на пункте "Проверка при программировании". Нажмите "Ok".

Готово, теперь программа полностью готова к работе с программатором. Подключаем наш программатор к СОМ порту, выбираем наш микроконтроллер в программе, открываем прошивку и программируем любые МК серии PIC. Удачи всем в работе с программатором и контроллерами! Автор: [)еНиС
Форум по обсуждению материала ПРОГРАММИРОВАНИЕ PIC КОНТРОЛЛЕРОВ

Сравнение активных и пассивных радиодеталей, основы классификации.

Классический фонарик со встроенным зарядным устройством можно неплохо улучшить, добавив пару микросхем и 18650 АКБ.

Изучение принципа действия и параметров кварцевого генератора, выбор КГ для различных устройств.
Читайте также: