
Как подобрать шаговый двигатель для станка чпу шд из принтера
Обновлено: 18.05.2024
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя. Давай разберемся подробнее на примере 3d принтера, домашнего CNC.
Конструктивно шаговые двигатели можно поделить на три больших класса – это двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридный класс, сочетающий характеристики первых двух.
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор из магнитомягкого материала, который не сохраняет остаточную намагниченность. Для простоты ротор на рисунке имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Двигатель на рисунке имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.
Двигатели с постоянными магнитами состоят из статора с обмотками и ротора, содержащего постоянные магниты. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость, чем двигатели с переменным магнитным сопротивлением и двигатели с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400, что соответсвует углам шага 3.6 – 0.9 градусов. Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса. Шаговые двигатели обладают собственной резонансной частотой. Это связано с тем, что ротор после подачи тока в обмотку некоторое время колеблется, прежде чем зафиксироваться в конечном положении, и колебания тем сильней, чем больше инерция ротора. Резонанс приводит к повышенному шуму, вибрациям и падению крутящего момента двигателя. Один из способов победить резонанс – увеличить деление шага. Мелкие перемещения в микрошаге не требуют длительных разгона и фиксации ротора, быстро останавливают его между шагами и увеличивают частоту шагания выше резонансной.
- возможна потеря контроля положения ввиду работы без обратной связи. При превышении усилия на валу выше того, который может создать двигатель, он начнет пропускать шаги. Так как у двигателя нет обратной связи, то контроллер не может узнать об этом и даже если двигатель начнет вращаться снова, стартует он уже из неправильного рабочего положения. Для устранения этого недостатка можно использовать сервошаговый двигатель или увеличить момент на валу, повысив напряжение, настроив драйвер на больший ток или заменив двигатель на более мощный.
- потребляет энергию независимо от нагрузки. Шаговый двигатель в промежуточном положении фиксируется с полным моментом. Шагает он тоже с полным моментом. Поэтому он продолжает потреблять электричество без особой зависимости от нагрузки на валу. Снизить общее потребление энергии двигателем мы можем применив драйвера, которые уменьшают подаваемый в режиме удержания ток.
- затруднена работа на высоких скоростях. На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
- невысокая удельная мощность.Шаговый двигатель по удельной мощности на грамм веса не самый энергонасыщенный электропривод. Сделать с этим мы ничего не можем.
- относительно сложная схема управления.Драйвера шаговых двигателей насыщены электроникой. Тут мы тоже не можем что-то изменить.
Двигатель на 3D-принтере
В конструкции 3D-принтера основную функцию за движение экструдера по осям выполняют шаговые двигатели. Они имеют незначительный вес и большой крутящий момент.
Гибридный двигатель — наиболее часто встречающаяся конструкция, которая, в свою очередь, делится на униполярный и биполярный тип.
Какие шаговые двигатели выбрать для 3D-принтера: лучшие варианты
При покупке вращающего устройства для 3D-принтера стоит обратить внимание на следующие параметры:
- размер вращающей конструкции;
- момент удержания — от 2,5–4 кг/см;
- номинальный ток — оптимальная версия на 1,7 А;
- вал — диаметр должен соответствовать конструктивным параметрам принтера.
Самые распространенные двигатели, которые устанавливают на конструкцию печатного устройства — биполярный с четырьмя выводами. Такие конструкции в случае поломки легко найти и заменить.
3D-принтерах устанавливаются вращающие моторы с маркировкой NEMA.
NEMA — Национальная ассоциация производителей электрооборудования, которая стандартизировала вращающие устройства по таким параметрам, как размер фланца и посадочные параметры. Такой стандарт позволяет разным производителям выпускать двигатели по определенным параметрам в зависимости от маркировки.
Самые востребованные модели в серии NEMA:
- NEMA 17 с фланцем 42 * 42 мм;
- NEMA 23 с фланцем 57 * 57 мм;
- NEMA 34 размером 86 * 86 мм.
Управление шаговым двигателем
Независимо от того, какой драйвер или двигатель использован, управление шаговым двигателем может осуществляться в одном из трёх режимов:
- полношаговое
- полушаговое
- микрошаговое
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, а между шагами включаются сразу обе. Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме так же работают две фазы, однако токи обмоток в данном случае распределяются неравномерно, а не 50/50, как в полушаговом. Величина микрошага зависит от конкретного устройства и настроек драйвера. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако требуется более сложный драйвер двигателя.
Для управления двигателями в 3D-устройствах были разработаны драйверы, устанавливаемые в гнездо платы.

Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
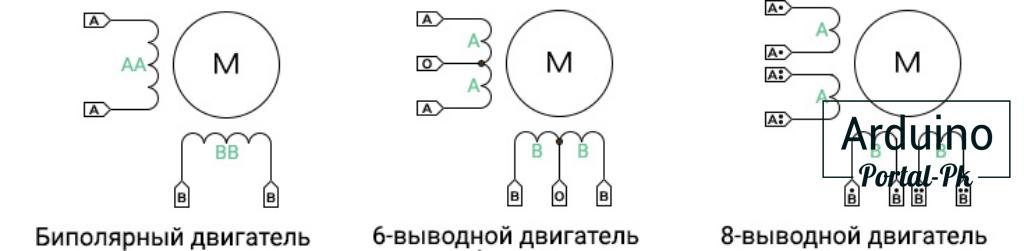
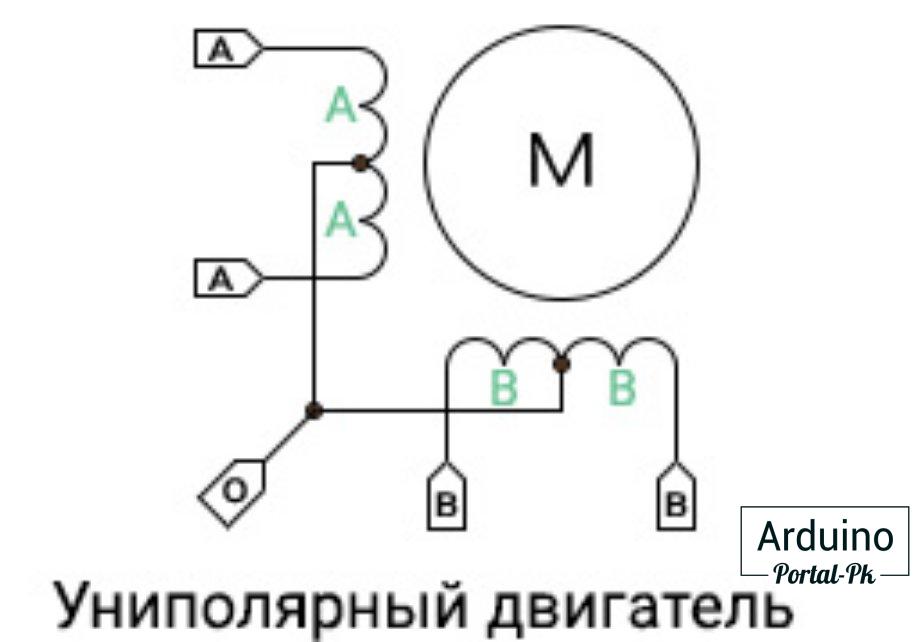
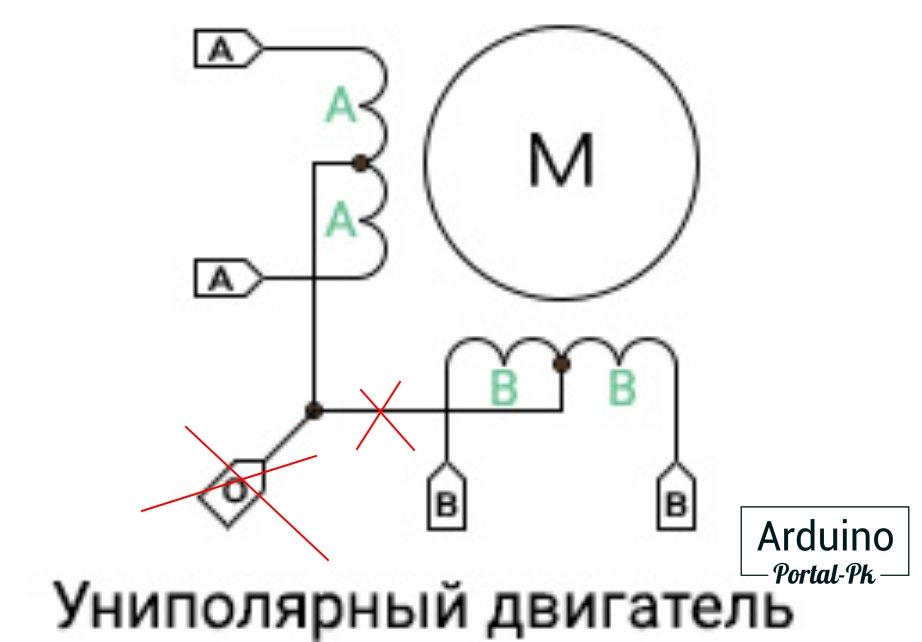
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
В данном случае ШД имеет момент в 1.4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
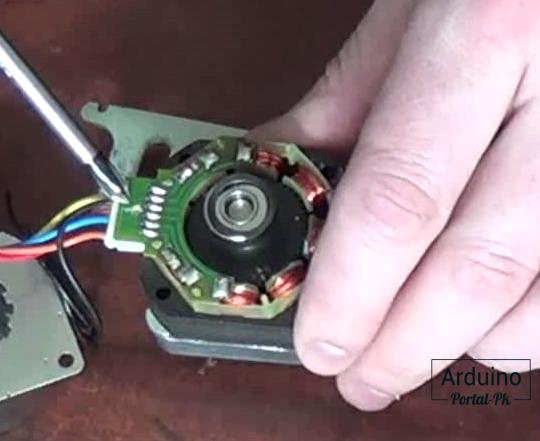
Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
В итоге у нас получается биполярный двигатель с 4 выводами.
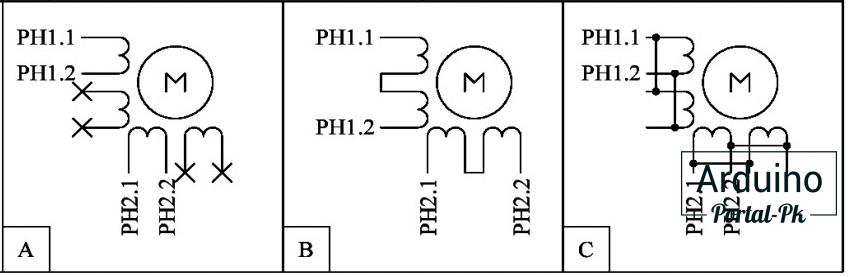
Подключение А - шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой .
Сопротивление обмотки, Ом
Рабочее напряжение, В
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Шаговый двигатель понадобится любому человеку, который собрался самостоятельно собрать станок с ЧПУ. Главное – заранее определиться со сферой применения устройства. Наибольших усилий и показателей требует обработка цветных металлов, что отдельно учитывается при выборе шагового двигателя для ЧПУ.
- Какие критерии определяющие для выбора?
- О разновидностях двигателей
- Об усилиях резания
- По поводу резонанса при средних частотах
- Об энкодерах и драйверах, подключениях
- Дополнительные рекомендации по выбору
- Что ещё учесть?
- Заключение
Шаговый двигатель понадобится любому человеку, который собрался самостоятельно собрать станок с ЧПУ. Главное – заранее определиться со сферой применения устройства. Наибольших усилий и показателей требует обработка цветных металлов, что отдельно учитывается при выборе шагового двигателя для ЧПУ.
Какие критерии определяющие для выбора?
Надо помнить о том, что, по сравнению с обычными двигателями, шаговые требуют более сложных схем для управления. А критериев не так уж много.
Первый шаг – определение квадратного корня из индуктивности обмотки. Результат потом умножаем на 32. Значение, полученное в качестве итога, потом требуется сравнивать с напряжением источника, от которого питание идёт к драйверу.
Эти числа не должны отличаться друг от друга слишком сильно. Мотор будет греться и шуметь слишком сильно, если напряжение питания больше полученного значения на 30 и больше %. Если же он меньше, то, по мере нарастания скорости, крутящий момент убывает. Чем больше индуктивность – тем проще сохранить высокий крутящий момент. Но для этого надо подобрать драйвер, имеющий большое напряжение питания. Только в этом случае шаговой двигатель работает нормально.
- График того, как крутящий момент и скорость зависят друг от друга.
Это позволит понять, насколько двигатель в принципе соответствует запросам и техническому заданию.

Особое внимание рекомендуется уделить диаметру вала, фланцу и длине двигателя.
Кроме того, следующие показатели так же рекомендуется внимательно изучить:
- Максимальный статический синхронизирующий момент.
- Момент по инерции у роторов.
- Ток внутри фазы по номиналу.
- Общее сопротивление фаз омического типа.
О разновидностях двигателей
Для станка используемая разновидность шаговых двигателей – параметр не менее важный, чем остальные. Каждая модель наделена своими особенностями.
- Биполярные чаще всего применяются совместно с ЧПУ.
Главное достоинство – возможность легко выбрать новый драйвер, если старый выходит из строя. На малых оборотах при этом сохраняется высокое удельное сопротивление.
Для них характерна высокая скорость. Актуальны, если именно данному параметру уделяют больше всего внимания в случае выбора.
Это несколько видов биполярных двигателей, которые отличаются друг от друга и подбираются в зависимости от подключения обмотки.
Можно изучить готовые модели станков, предлагаемые текущим рынком. Благодаря подобному подходу выбор значительно упрощается. Главное – чтобы характеристики и размеры подходили к создаваемому проекту.

Об усилиях резания
Часто владельцы думают, что на фрезу агрегата надо сильно давить, иначе она будет неправильно работать. Это заблуждение, которое не соответствует истине. Важнее всего то, как правильно пользователь задаёт параметры рабочего процесса.
Не обязательно пользоваться сложными специальными формулами, чтобы понять, как правильно действовать. Это можно проверить и прямо голыми руками.
По поводу резонанса при средних частотах
Резонанс появляется, когда разность между скоростью и фазностью момента достигает 180 градусов. Это означает, что присутствует соответствие скорости и изменений внутри магнитного поля. Движение становится быстрым при позиционировании по новому шагу. Крутящий момент падает из-за того, что больше всего энергии уходит, чтобы преодолеть инерцию.
Об энкодерах и драйверах, подключениях
Специальные драйверы нужны для того, чтобы управлять устройством. Они подключаются к LTP портам у персональных компьютеров. От программы идёт генерация сигналов, которые потом принимаются драйверами. После чего двигатель и получает определённые команды. Подача тока на обмотки позволяет организовать работу всего устройства. Программное обеспечение облегчает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем двигателем. Формирование управляющего сигнала происходит при участии специального контроллера. Что предполагает подключение к устройству сразу четырёх выводов шагового двигателя. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для дальнейшей работы.
С контроллера ПУ сигналы идут к драйверу. Далее организуется управление процессом, во время которого переключаются ключи, составляющие схему с питающим напряжением. Последнее идёт с блока питания, на двигатель, проходя по ключам.

Дополнительные рекомендации по выбору
Максимум по току требуемого напряжения, идущего к выводам – главный фактор, на основании которого следует делать выбор. Ток, выдаваемый драйвером, может быть следующих типов:
- Такой же, что потребляет двигатель.
- Выше, чем упомянутое ранее значение.
Желаемые параметры по исходному напряжению выбираются при помощи специальных переключателей.
Шаговые двигатели могут иметь различный порядок подключения. Обычно он зависит от того, каким количеством проводов снабжён привод. Надо обратить внимание и на назначение устройства. На рынке выпускается множество моделей, и практически у каждой используется свой вариант подключаемой схемы. Внутри размещается до 4-6 проводов. Биполярные модули сопровождают стандартно именно варианты с четырьмя проводами.
Каждые две обмотки идут с двумя приводами. Нужно использовать обычный метр, чтобы не допустить ошибок. Шестипроводные двигатели отличаются максимальной мощностью. Это значит, что каждая обмотка сопровождается двумя проводами и одним центр-краном. Такие аппараты допускают два вида соединений:
- С биполярными аппаратами.
- С униполярными моделями.
Для разделения проводов так же применяются приборы измерения. Однополярные устройства предполагают, что используются все шесть проводов. В случае с биполярными можно взять всего один центральный кран вместе с проводами по одной обмотке.
Что ещё учесть?
Центр-краном называют обычный провод. Ещё для него используют обозначения «центральный», «средний». Часть моделей шаговых двигателей снабжаются подобными приспособлениями. Каждая обмотка идёт совместно с тремя проводами, когда речь идёт об униполярных вариантах. Два из них организуют соединение с транзисторами. Центр-кран или средний идёт прямо до источника питания или напряжения.

Два боковых провода вообще можно игнорировать, если транзисторы использовать не планируется.
Пяти- и шестипроводные модели во многом похожи друг на друга. Но внутри центральные провода выводятся в один общий кабель, вместе с остальными составляющими. Обмотки не удастся соединить друг с другом, если будут отсутствовать разрывы. Лучше всего именно средний провод соединять с другими проводниками. Тогда об эффективности и безопасности устройства можно будет не волноваться. Нужно просто брать подходящие детали.
Заключение
Подобрать подходящую модель двигателя для станка будет проще, если заранее изучить основные характеристики, а так же предложения на соответствующем рынке. Главное – обращаться к поставщикам, которые заслуживают доверия. Малейший брак и ошибка приведут к выходу из строя весьма дорогостоящих деталей.


Шаговый двигатель - устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости. Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В настоящее время рынок наполнен предложениями самых разнообразных двигателей, для самых разнообразных приложений, что немудрено запутаться при выборе шагового двигателя, даже если вы подготовились и изучили свойства шаговых моторов, узнали их основное свойство терять момент с ростом скорости вращения и, оценив момент инерции нагрузки, приведенной к валу, примерно определили какой крутящий момент на каких скоростях нужно получить от шаговика. Так как все же выбрать шаговый двигатель и на что необходимо первым делом посмотреть при покупке?
1. Тип двигателя - биполярный, униполярный, 3-фазный и т.п.
Ни один из типов двигателей не имеет каких-то радикальных преимуществ перед другими. Но у каждого из них есть свои небольшие особенности. Так, 3-фазные двигатели более скоростные - имеют меньший момент, чем биполярные такого же размера, но сохраняют его лучше, тем самым их хорошо использовать с редукторами, в скоростных передачах. Биполярные - наиболее распространенные, дают высокий удельный на малых оборотах, под них легко купить драйвер взамен вышедшего из строя. Униполярные - представляют собой гибкое решение, по сути заключают в себе несколько видов биполярных двигателей (в зависимости от того, как подключить обмотки), а также собственно униполярный 6-выводной мотор. В подавляющем большинстве биполярных достаточно, а если нужна высокая скорость вращения - имеет смысл использовать 3-фазный двигатель.
2. График зависимости момента от скорости
Основная характеристика. С этим графиком можно свериться и проверить, может ли данный шаговый двигатель вообще удовлетворить условиям вашего техзадания.
3. Индуктивность
Вычислите квадратный корень из индуктивности обмотки и умножьте на 32, полученное число сравните с напряжением вашего источника питания для драйвера. Эти числа не должны сильно отличаться - если напряжение питания сильно(30 и более %) превышает полученное число, двигатель будет шуметь и греться; если же сильно не дотягивает - крутящий момент будет убывать со скоростью слишком быстро.
4. Геометрические параметры
Фланец, диаметр вала - важны как присоединительные размеры. Фланец вкупе с длиной двигателя также обрисовывает "мощность" шагового двигателя.
Доброго времени суток Всем. Настало время сделать станок. У меня на первый взгляд простой вопрос для профессионалов в этом деле. Из какого расчета выбирается шаговый двигатель по мощности. Есть ли какие формулы для расчетов? Станок планирую для обработки древесины и пластика с рабочим полем 600 на 900.
2 Ответ от Sergey_Slavyanskiy 2016-02-11 08:40:43
Доброго времени суток Всем. Настало время сделать станок. У меня на первый взгляд простой вопрос для профессионалов в этом деле. Из какого расчета выбирается шаговый двигатель по мощности. Есть ли какие формулы для расчетов? Станок планирую для обработки древесины и пластика с рабочим полем 600 на 900.
Естественно на каждый шаговый двигатель действует момент силы измеряемый в ньютон на метр ( Н*м). Подбирается в зависимости от станка, нужно знать конфигурацию и момент станка измерить можно простыми методами тоже в ньютон-метр!
3 Ответ от iiv9 2016-02-11 14:57:10
Большое спасибо за ответ. Планирую делать станок по модели №4 (хоть про него ничего хорошего не пишут). Ориентировочно какие двигатели подойдут. Много моторов от старых принтеров, но они на мой взгляд слабоваты.
4 Ответ от cnc-master 2016-02-12 12:08:51
Много моторов от старых принтеров, но они на мой взгляд слабоваты.
С моторчиками от принтера ничего дельного не получится! Разве что можно сделать выжигатель)
5 Ответ от pavel2015zp 2016-02-27 16:01:55
Кто работал с шаговиками Nema 23 (3 А, 22 кг/см)? Хочу собрать станок используя такие двигатели. Как они показали себя в работе, не греются соответствуют указанным характеристикам?
6 Ответ от Sergey_Slavyanskiy 2016-02-28 16:28:55
Кто работал с шаговиками Nema 23 (3 А, 22 кг/см)? Хочу собрать станок используя такие двигатели. Как они показали себя в работе, не греются соответствуют указанным характеристикам?
7 Ответ от pavel2015zp 2016-03-01 15:57:44 (изменено: pavel2015zp, 2016-03-01 15:58:37)
Кто работал с шаговиками Nema 23 (3 А, 22 кг/см)? Хочу собрать станок используя такие двигатели. Как они показали себя в работе, не греются соответствуют указанным характеристикам?
Планирую собрать фрезер ЧПУ (2000х1200х300) :
- ось у - два двигателя Nema 23 (3 А, 22 кг/см) + 2 ШВП 2005 либо реечная передача
- ось х - один двигатель Nema 23 (3 А, 22 кг/см) + 1 ШВП 2005
- ось z - один двигатель Nema 23 (3 А, 22 кг/см) + 1 ШВП 2005
Работать на станке буду в основном с деревом твердых парод и иногда алюминий
8 Ответ от Sergey_Slavyanskiy 2016-03-02 10:27:21
нет не подойдёт 23
9 Ответ от oparin-ac 2016-03-16 10:25:46
Скажите а как определить сколько Н*М мне нужно. Прошу прощения а то я в школе давно учился, не соображу что то.
10 Ответ от ficus 2016-04-11 14:06:17
11 Ответ от Salomonlarry 2016-04-24 14:37:21
Добавлено: 2016-04-24 14:40:36
Передача будет ШВП
12 Ответ от Sergey_Slavyanskiy 2016-04-24 15:55:21
13 Ответ от oldviking 2016-05-01 02:09:48
Почему нет -хоть немного разъясните ,ато получается 34-й больше ставьте их и лучше если купите у нас!
Хотелось бы немного увидеть растеты с обоснованиями
14 Ответ от Sergey_Slavyanskiy 2016-05-01 11:04:28
я 16 лет строю станки! на опыте я вам сказал, по расчётам в интернет для изучения мат части ! да и то ваши расчёты не помогут какой китайский завод? какие двигателя вы уверены что заявленные мощности те что у вас в двигатели. Дальше какие винты вы ставите ? даже хивины типа бренд натяг разный, дальше винты также , в общем если вам нужно умники они на другом форуме, там пипец как умничают и расчёты суют а сами нихрена не сделали, а если и вымучали один два станка считают себя профи! я сделал сотни станков!
хотите сэкономить? сэкономите но столкнётесь с проблемами!
я вам не предлагал у нас ничего покупать и совет бесплатный !
15 Ответ от vovchik21 2016-05-02 21:43:12
я где-то видел калькулятор расчета шд, но не сохранил, как раз рассчитать можно было бы
16 Ответ от Sergey_Slavyanskiy 2016-05-03 19:22:54
Есть калькуляторы и алгоритмы расчёта, но своё мнение практикой проверено! Приходят винты шариковинтовые, которые вращаются с разной нагрузкой
17 Ответ от mig38m 2016-05-17 21:23:55
Ну ШВП так то калибровать по диаметру шаров можно, подбирая натяг, но с этим мало кто заморачивается.
18 Ответ от romario9 2016-05-19 13:37:21
Как можно снять шестерню с вала что бы не особо травмировать двигатель?
19 Ответ от cnc-master 2016-05-19 15:03:12
Как можно снять шестерню с вала что бы не особо травмировать двигатель?
20 Ответ от PavelP 2016-07-03 22:00:43
Как лучше синхронизировать между собой шд: через ремень, или программно? И получится ли использовать 1 драйвер для двух шд Nema 23 или все же лучше на каждый двигатель свой драйвер?
21 Ответ от anatoly 2016-07-03 22:05:25
Как лучше синхронизировать между собой шд: через ремень, или программно? И получится ли использовать 1 драйвер для двух шд Nema 23 или все же лучше на каждый двигатель свой драйвер?
Лучше на каждый двигатель.
22 Ответ от Sergey_Slavyanskiy 2016-07-05 16:21:30
23 Ответ от molder 2017-01-25 14:35:05
Вопрос по шаговики: Станок CNC 4060, алюминий, китай. Шпиндель DC 300 вт. Шаговики установлены нема 23 FL57STH56-2804B. Заказал себе 1.5 квт шпиндель с частотником. У китайцев на таких станках с 1.5 квт шпинделями стоят шаговики мощнее, типа FL57STH76-2804B. Нужно ли мне менять шаговики или эти потянут?
24 Ответ от ygordom 2017-01-25 18:23:33
Нужно ли мне менять шаговики или эти потянут?
Если У Вас 300 вт. шаговики тянули, то 1500 вообще без проблем, ну я так полагаю, Вы хотите увеличить скорость обработки, если 1500 вт. шпиндель хотите поставить, если на немного прибавите скорости, то ничего страшного, Вы-же конструкцию станка не меняете, а значит и шаговики можно не трогать.
25 Ответ от Peters57 2017-02-25 02:37:12
Доброго времени суток Всем. Настало время сделать станок. У меня на первый взгляд простой вопрос для профессионалов в этом деле. Из какого расчета выбирается шаговый двигатель по мощности. Есть ли какие формулы для расчетов? Станок планирую для обработки древесины и пластика с рабочим полем 600 на 900.
У меня практически такой же самый вопрос, только наоборот.
Нашел (случайно) 3 шаговых двигателя:
2 шт. модель 103Н7126 -0649 1,8 град. 2,5А фирма Sanyo Denki
и один на 3,35А той же фирмы.
Вопрос: какого максимального размера можно сконструировать фрезерный станок?
Форум работает на PunBB , при поддержке Informer Technologies, Inc
Сгенерировано за 0.047 секунды (95% PHP — 5% БД) 8 запросов к базе данных
Читайте также: