
Как управляется шаговый двигатель в 3 д принтере
Обновлено: 18.05.2024
С появлением 3D-принтеров жизнь людей стала значительно проще. Устройства успешно используют во многих сферах — стоматологии, промышленности, ювелирном деле и медицине. Сейчас 3D-принтер — не предмет роскоши, а вполне доступная по стоимости конструкция. Но все же есть те, кто решается на самостоятельное изготовление печатающих станков. Далее поговорим о том, как выбрать шаговый двигатель для будущего 3D-принтера и какие особенности при этом стоит учесть.
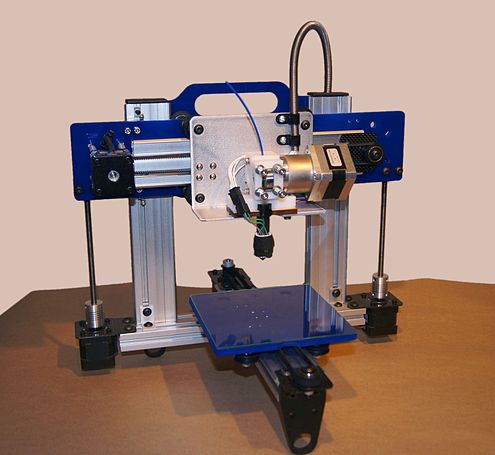
Двигатель на 3D-принтере
В конструкции 3D-принтера основную функцию за движение экструдера по осям выполняют шаговые двигатели. Они имеют незначительный вес и большой крутящий момент.
Шаговый электродвигатель — это двигатель, не имеющий коллектора, у которого вращение производится не плавно, а дискретно (шагами). Задавая скорость и длительность импульсов, можно заставить устройство вращаться в определенном направлении. При этом есть возможность регулировать направление вращения и количество оборотов ротора.
Если говорить о конструкции подобных устройств, то выделяют три основных вида:
- Двигатели с переменным магнитным сопротивлением — имеют несколько полюсов на статоре и ротор, изготовленный из мягкого материала, и 3 независимые друг от друга обмотки. Этот вид практически не используется.
- Двигатели с постоянным магнитным сопротивлением — в комплектацию входит статор и намагниченный ротор. Такие двигатели имеют от 24 до 48 шагов на один оборот.
- Устройства, сочетающие переменное и постоянное магнитное сопротивление (гибриды) — сочетание лучших свойств переменного и постоянного вращающего двигателя. Число шагов составляет от 100 до 400.
Гибридный двигатель — наиболее часто встречающаяся конструкция, которая, в свою очередь, делится на униполярный и биполярный тип.
Какие шаговые двигатели выбрать для 3D-принтера: лучшие варианты
При покупке вращающего устройства для 3D-принтера стоит обратить внимание на следующие параметры:
- размер вращающей конструкции;
- момент удержания — от 2,5–4 кг/см;
- номинальный ток — оптимальная версия на 1,7 А;
- вал — диаметр должен соответствовать конструктивным параметрам принтера.
Самые распространенные двигатели, которые устанавливают на конструкцию печатного устройства — биполярный с четырьмя выводами. Такие конструкции в случае поломки легко найти и заменить.

В 3D-принтерах устанавливаются вращающие моторы с маркировкой NEMA.
NEMA — Национальная ассоциация производителей электрооборудования, которая стандартизировала вращающие устройства по таким параметрам, как размер фланца и посадочные параметры. Такой стандарт позволяет разным производителям выпускать двигатели по определенным параметрам в зависимости от маркировки.
Самые востребованные модели в серии NEMA:
- NEMA 17 с фланцем 42 * 42 мм;
- NEMA 23 с фланцем 57 * 57 мм;
- NEMA 34 размером 86 * 86 мм.
Драйверы шаговых двигателей для 3D-принтера
Для управления двигателями в 3D-устройствах были разработаны драйверы, устанавливаемые в гнездо платы.

Драйверы бывают несколько типов:
- Постоянного напряжения — такие драйверы неэффективны и используются в изделии с малыми скоростями.
- Двухуровневые — подобные контроллеры поддерживают шаговые и полушаговые режимы. Они снижают нагрев двигателя и эффективны в работе.
- Драйверы с ШИМ — самые популярные, которые можно встретить на рынке. Они высокоинтеллектуальные и имеют множество дополнительных функций.
Также при выборе драйвера стоит обращать на следующие параметры:
- сила тока;
- напряжение питания;
- наличие опторазвязанных входов;
- наличие механизмов подавления резонанса;
- наличие протоколов, необходимых для работы двигателя;
- защита от скачков напряжения;
- микрошаговый режим;
- качество драйвера.
Собрать качественный 3D-принтер вполне реально, если следовать рекомендациям и внимательно изучить конструктивные устройства. Вполне возможно, что такой печатный станок обойдется его владельцу дешевле. Но новичкам мы рекомендуем заказывать готовые 3D-устройства в специализированных магазинах. Так вы сможете освоить азы 3D-печати и ознакомиться с устройством принтера. Желаем удачи!
Приводы, построенные на основе шаговых двигателей, предназначены для систем программного управления рабочими механизмами. Способность преобразовывать импульсные электрические сигналы в механическое высокоточное перемещение открыло широкие перспективы для их применения.
Современными системами электроприводов управляют электронные микропроцессорные устройства. Формируя определенную последовательность импульсов, они передают команды исполнительным механизмам. Для преобразования цифровой формы сигналов в движение был создан отдельный тип приводов – шаговый двигатель. Высокая надежность, точность позиционирования, повторяемость и ряд других положительных качеств позволили успешно применять шаговые двигатели для 3d печати.
Краткая характеристика приводов
Создание шаговых двигателей (ШД) для электроприводов с программным управлением позволило обеспечить высокоточное перемещения рабочих механизмов. Преобразовывая цифровую форму управляющих сигналов, ШД фиксируют угол поворота вала или выполняют линейное перемещение рабочего узла без датчика обратной связи. Это упрощает построение системы привода и уменьшает стоимость. В связи со спецификой работы эти эл/моторы также называют импульсными.
ШД могут выполнять и диаметрально противоположные функции, преобразовывая механическое вращение в электроэнергию. С этой целью делают генератор из шагового двигателя. Подобные генераторные устройства имеют бытовое применение и делаются любителями самостоятельно, для чего зачастую используют шаговый двигатель от принтера, вышедшего из строя.
Классическая пара основных компонентов моторов – ротор-статор – создает вращающий момент посредством взаимодействующих между собой магнитных потоков. Роторно-статорная связка имеет свои структурные элементы. Главные из них: обмотки возбуждения, полюса, магнитопроводы (сердечники, собранные из отдельных стальных пластин), постоянные магниты. В зависимости от типа ШД конструктивная схема может частично меняться, но сам принцип вращения, возникающего посредством электромагнитной индукции, остается прежним.
Значение крутящего момента находится в прямой зависимости от характеристик магнитного поля, создаваемого потоком тока в электрообмотках. При подключении обмотки к питанию, ротор занимает определенную позицию и сохраняет ее, пока внешний действующий момент не станет больше определенной величины. Этот параметр называется моментом удержания и является особенно важным для позиционирования в технологии 3д-моделирования.
Шаговые двигатели для 3d печати должны обладать устойчивостью работы для исключения пропуска шагов. Под понятием устойчивости подразумевают способность электропривода вращать ротор без потери импульсов. Различают статическую и динамическую устойчивость. Первая характеризуется зоной устойчивого равновесия, в которую ротор возвращается после снятия внешних воздействий. Вторая определяется зоной, в которой роторное устройство, выходя из одной точки равновесия, переходит в другую устойчивую позицию.
Электропривод для 3д-принтера
Существует три разновидности шагового двигателя для построения электроприводов:
- с переменным магнитным сопротивлением;
- с постоянными магнитами;
- гибридные.
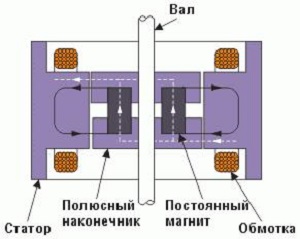
Приведенные категории эл/двигателей отличаются конструктивными элементами, типом возбуждения, техническими характеристиками. Для 3d принтера чаще всего применяются гибридные приводные механизмы. Эти приводы представляют собой усовершенствованный вариант моторов с постоянными магнитами и объединяет в себе все лучшие качества двух других категорий механизмов. Роторный узел выполнен с зубцами, ориентированными в продольном направлении. Состоит из двух блоков, разделенных постоянным магнитом и являющихся противоположными полюсами.
Количество полюсных пар соответствует числу зубьев на одном из блоков ротора. Для снижения вихревых токовых воздействий полюсные наконечники собирают из тонких стальных полос.
На статорном устройстве также выполняют зубья, обеспечивающие конечное число магнитных полюсов. Количество главных полюсов с расположенными на них электроцепями может быть разным. Обычно у шагового двигателя на постоянных магнитах с дискретностью шага 3.6˚ (что эквивалентно 200 шагам на один оборот) – это четыре полюсных точки, а у эл/мотора с угловым шагом 1.8˚ (400 шагов/об) – восемь магнитных зон.
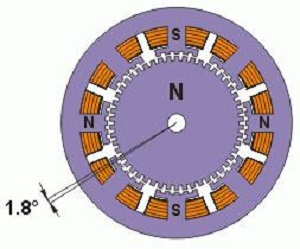
Роторный узел шагового двигателя для установки в 3д принтер стандартно имеет пятьдесят полюсных пар, но в связи с тем, что ШД является двухфазным, фактически таких пар вдвое больше, что соответствует двумстам полюсам и дискретности шага 3.6˚.
Вал ШД отличается повышенной хрупкостью. Это связано с применением немагнитной стали для изготовления. Использование такой марки металла не допускает объединения магнитных потоков через вращающийся вал.
В зависимости от принципа выполнения обмоток гибридные электромоторы, используемые в принтерах, разделяют на:
- биполярные (двухполярные);
- униполярные (однополярные).
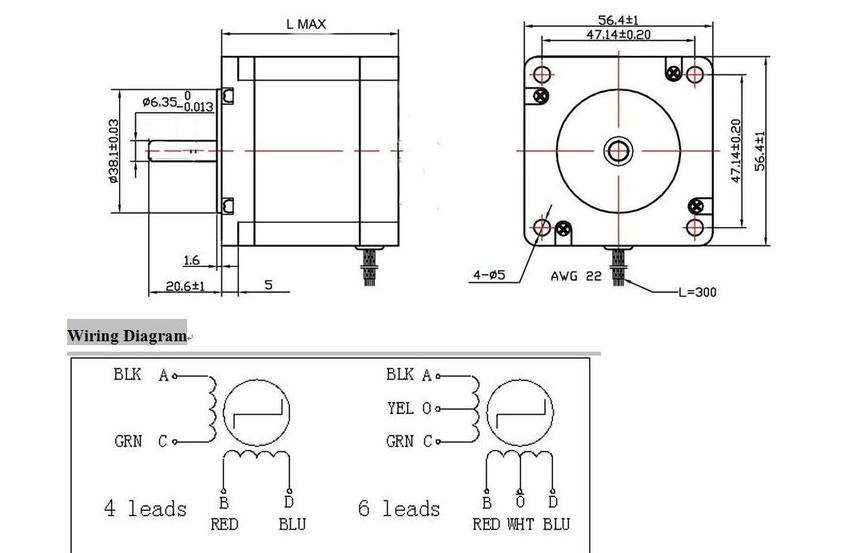
Двухполярные электромоторы выполняются с одной электрической цепью в каждой фазе, соответственно для двух обмоток – это четыре выводных контакта (на рисунке позиция «а»), чтобы подключить внешние элементы. Смену полюсов электроцепей для изменения направления магнитного потока производит драйвер шагового двигателя: мостовой или полумостовой с 2-полярным электропитанием.
Особенность униполярных моторов состоит в наличии дополнительных ответвлений в средней части обмоток (б), которые по мере необходимости объединяются в конструкции привода в общий центральный вывод (в). Как вариант, возможна конфигурация с четырьмя обособленными цепями и восемью отводами (г).
Сколько в итоге потребуется контактных выводов, зависит от индивидуальных требований управления. Шаговые двигатели для 3д моделирования имеют в основном четыре вывода. Второй возможный вариант – с шестью выводными контактами. Выбор электрооборудования определенного типа зависит от требуемых мощностных и моментных характеристик.
Биполярный шаговый двигатель 3d печати обладает следующими особенностями:
- большей удельной мощностью (соотношением показателей мощность/объем);
- большим крутящим моментом;
- меньшим нагревом электродвигателя;
- включением в работу всех обмоток.
Одновременное задействование всех электрообмоток позволяет использовать провода электроцепей большего сечения, что уменьшает омическое сопротивление, увеличивает крутящий момент приблизительно на 40% и тем самым обеспечивает эффективное вращение вала. Поэтому такой шаговый двигатель для объемной печати может устанавливаться в принтерах, ориентированных на сложную 3d модель.
Униполярный привод отличается более простой схемой управления электроцепями, что имеет первостепенное значение, если драйвер шагового двигателя выполнен на дискретных компонентах. Поэтому, когда нет необходимости в повышенном моменте, запуск и работу принтера осуществляют униполярные моторы с меньшими габаритами. Простое управление однополярными эл/двигателями сделало их популярными среди любителей самодельной электротехники. К тому же подобный вариант электропривода –наиболее дешевый способ точного углового перемещения.
Альтернативное применение ШД
По мере создания новых, более совершенных способов печати, прежние модели снимают с производства, и их ремонт или замена становится затруднительными. Поэтому при серьезной поломке нет смысла думать, как поменять вышедшую из строя деталь. В этом случае находят альтернативное применение другим механизмам устройства. Яркий пример – использование ШД, установленного в матричном принтере, в качестве небольшого генераторного агрегата. Подобные печатные аппараты зачастую имеют униполярные моторы с простой схемой управления и оптимальными техническими параметрами. Генератор из шагового двигателя этого типа может быть использован для:
- подзарядки аккумулятора;
- ветрогенераторной установки бытового применения;
- подзарядки велосипедного фонаря и др.
На начальном этапе, когда ШД уже извлечен из принтера, его тестируют на предмет пригодности к дальнейшему использованию. Как запустить шаговый двигатель в этом случае? Для проведения теста потребуется вольтметр, измеряющий напряжение, диодный мост, конденсатор (чтобы не спалить светодиоды) и второй электромотор, который придаст ускорение и послужит непосредственным приводом двигателя от принтера.
Обеспечив ременную передачу оборотов от приводного мотора, шаговый двигатель для теста через диодный мост и конденсатор соединяют с лентой с яркими светодиодами. Затем выполняют плавный запуск собранной системы. При этом напряжение выставляют немногим меньше пяти вольт, чтобы шаговый двигатель после диодного моста выдавал порядка двенадцати вольт.

Если после подключения начального привода к электропитанию, мотор от принтера начал работать и светодиоды стали светиться, то это значит, что ШД может выполнять функции генераторного устройства. Существуют и другие способы, как запустить шаговый двигатель в тестовом режиме. Но цель всех этих действий всегда одна – проверить способность электромотора обеспечивать автономное электропитание.
Достоинства и недостатки
Цифровые технологии объемной печати требуют передовых средств для привода рабочих механизмов. Поэтому на сегодня оптимальным решением считаются импульсные/шаговые электродвигатели, обладающие следующими достоинствами:
- обеспечением полного момента в режиме удержания;
- высокоточным позиционированием и повторяемостью;
- определением величины углового перемещения ротора последовательностью управляющих импульсов;
- способностью быстро стартовать, останавливаться, менять направление вращения;
- высокой надежностью благодаря отсутствию щеточно-коллекторного узла;
- способностью работать на очень низких скоростях с достаточным крутящим моментом;
- широким диапазоном рабочих скоростей.
Самым большим недостатком ШД считается возможный пропуск шагов, вызывающий отклонение от заданного положения вала, а также невозможность своевременной корректировки позиции в связи с отсутствием датчиков обратной связи. Среди отрицательных качеств также отмечают невысокую удельную мощность, неспособность обеспечивать качественный привод на высоких скоростях, неэкономное потребление электроэнергии и возникновение резонанса.

В этой публикации я хочу поделиться своим опытом управления. Точнее – управления шагами. А уж если быть совсем точным, речь пойдёт об управлении замечательным устройством – шаговым электродвигателем.
Что же такое этот самый шаговый электродвигатель? В принципе, в плане функциональности этот мотор можно представить как обычный электромотор, каждый оборот вала которого разбит на множество одинаковых, точно фиксированных шагов. Перемещением на определённое количество шагов мы можем позиционировать вал шагового мотора с высокой точностью и хорошей повторяемостью. Каждый шаг можно разбить на множество ступенек (так называемый микростеппинг), что увеличивает плавность хода мотора, способствует подавлению резонансов, а также увеличивает угловое разрешение. Различия между полношаговым режимом (слева), 1/2 микростеппингом (в центре) и 1/16 микростеппингом (справа) видны невооружённым глазом:
К сожалению, все вышеупомянутые преимущества достигаются ценой значительной сложности системы управления шаговым мотором (для простоты будем называть эту систему драйвером).
Теперь рассмотрим схему работы типичного шагового мотора:
Из этой картинки видно, что шаговый мотор в электрическом плане представляет собой два или более электромагнита, которые необходимо переключать в определённой последовательности для приведения ротора в движение.
Лирическое отступление: На настоящий момент существуют два основных типа шаговых моторов: униполярный и биполярный. Поскольку униполярные моторы имеют меньший крутящий момент и худшие скоростные характеристики, в данной публикации они рассматриваться не будут.
Итак, вернёмся к управлению биполярным мотором. Как это ни парадоксально звучит, но зачастую проще обсуждать общие принципы на конкретных примерах. В качестве примера мы возьмём шаговый мотор ST4118L1804-A производителя Nanotec. Почему именно этот мотор и производитель? Причина проста: по основным характеристикам это типичный представитель моторов типоразмера NEMA 17, широко применяющихся в радиолюбительской практике, и имеет к тому же довольно подробную техдокументацию (которая начисто отсутствует у китайских noname-моторов).
Основные характеристики данного мотора:
Рабочее напряжение 3,15 В
Рабочий ток 1,8 А
Активное сопротивление обмотки 1,75 Ом
Индуктивность обмотки 3,3 мГн
Момент удержания 0,5 Нм
Угловой размер шага 1,8° (200 шагов на один оборот ротора)

В данном случае самое главное — это правильная интерпретация данных. Применив закон Ома, выясняем, что производитель указал рабочий ток и напряжение для постоянного тока, протекающего через обмотки двигателя, без учёта индуктивности.
Проверка: I = U/R, или 1,8 А = 3,15 В/1,75 Ом. Всё сходится.
Какой же будет мощность рассеяния при питании обмоток постоянным током?
Всё просто: P=I x U, или 1,8 А х 3,15 В = 5,67 Вт. В полушаговом режиме возможна ситуация, когда ток течёт через обе обмотки мотора, соответственно рассеиваемую мощность нужно удвоить: 5,67 Вт х 2 = 11,34 Вт. Это достаточно много, и может привести к перегреву мотора. Эта же величина является минимальной мощностью блока питания для этого мотора. Обыкновенный 3D принтер имеет пять подобных моторов, соответственно для питания драйверов необходим источник питания с минимальной мощностью 11,34 Вт х 5 = 56,7 Вт. К этой цифре необходимо добавить электрическую мощность, превращённую мотором в кинетическую или потенциальную энергию при работе принтера. Точный расчёт этой мощности — дело достаточно сложное, на практике проще всего добавить 75% к рассчитанной тепловой мощности и на том завершить расчёты. Почему именно 75%? Дело в том, что обычный шаговый мотор способен совершить полезную работу на величину примерно 2/3 от максимальной тепловой мощности. В данном случае для создания какого-либо узла или устройства сначала подбирается подходящий мотор (например, по крутящему моменту), а после этого рассчитывается мощность блока питания.
Итоговая мощность блока питания для пяти шаговых моторов: 56,7 Вт х 1,75 = 99,225 Вт.
Конечно, на практике ни в одном любительском устройстве не используются моторы под максимальной нагрузкой, и реальная мощность потребления будет, скорее всего, намного ниже расчётной. Я же, как человек ленивый и скаредный, крайне не люблю делать одно и то же два раза, поэтому беру блок питания всегда с некоторым запасом (то есть, согласно вышеприведённым расчётам).
Теперь пришла пора приступить к определению минимально необходимого напряжения блока питания. К сожалению, этому параметру уделяется незаслуженно маленькое внимание в тематических публикациях. Почему этот параметр так важен? Дело в том, что при вращении ротора шагового мотора через катушки течёт переменный ток, ограниченный не только активным, но также и индуктивным сопротивлением обмоток.
Рассмотрим предоставленный производителем график зависимости крутящего момента нашего мотора от частоты вращения:
На графике присутствуют две линии, показывающие зависимость крутящего момента от частоты вращения для напряжения питания 24 В (красная линия) и 48 В (зелёная линия). Нетрудно заметить, что спад крутящего момента начинается примерно с 300 об/мин для 24 В и примерно с 600-700 об/мин для напряжения 48 В. При этом необходимо упомянуть, что производитель использует недоступные любителям дорогостоящие промышленные драйверы. Почему же так важно напряжение питания драйвера, если оно даже в случае питания от 12 В заведомо выше паспортной величины напряжения питания шагового мотора (3,15 В)? Дело в том, что шаговый мотор управляется током, а не напряжением, и именно источниками тока являются все современные драйверы. В идеальном случае драйвер обеспечивает заданный ток в обмотках двигателя вне зависимости от частоты вращения ротора, нагрузки, изменения температуры и других параметров. Это организовано за счёт работы ШИМ-регулятора, управляемого зачастую довольно сложными алгоритмами. Из технической документации нашего мотора видно, что для полного оборота ротору необходимо совершить 200 шагов, при 300 об/мин это составит 60 000 шагов в минуту, или 1000 шагов в секунду. Это, проще говоря, соответствует переменному току частотой 1 кГц. На этой частоте индуктивное сопротивление обмотки составит (R(L)=2π×F×L): 2π х 1 кГц х 3,3 мГн = 20,73 Ом. Какое же напряжение необходимо для обеспеченияя тока в 1,8 А при этом сопротивлении? Закон Ома не дремлет (U=IR): 1,8 А х 20,73 Ом = 37,31 В. Неудивительно, что выше частоты вращения 300 об/мин наблюдается спад крутящего момента: драйверу банально не хватает напряжения питания. Почему же при таком вопиющем недостатке питания (37 — 24 =13 В) спад не наступает при более низкой частоте вращения? Дело в том, что в современных драйверах используется мостовая схема выходных каскадов, что позволяет «удваивать» напряжение, прикладываемое к обмоткам мотора. То есть, теоретически драйвер способен приложить «виртуальные» 48 В к обмоткам при напряжении питания 24 В, что создаёт теоретический запас по напряжению 48 — 37 = 11 В. На практике же этот запас будет нивелирован потерями в драйвере, сопутствующих цепях и активным сопротивлением обмоток мотора (активное сопротивление обмоток присутствует постоянно, и даже несколько возрастает при нагреве мотора). При увеличении частоты вращения ротора свыше 300 об/мин пропорционально растёт частота импульсов и, соответственно, увеличивается индуктивное сопротивление обмотки. При питании от 24 В драйверу перестаёт хватать напряжения питания для поддержания тока в обмотках, и крутящий момент неуклонно снижается. То же самое происходит при питании драйвера от 48 В, но уже гораздо значительно позже, при частоте вращения 600-700 об/мин.
Итак, с мощностью и величиной напряжения блока питания всё ясно, теперь необходимо переходить к практической реализации универсального драйвера, способного как к филигранной работе при помощи крохотных NEMA 11, так и к сотрясению основ мира в паре с могучими NEMA 23. Какими же основными качествами должен иметь драйвер моей мечты?
1. Высокое напряжение питания. Поскольку в техдокументации к моторам крайне редко указано максимальное напряжение питания, лучше будет ограничиться напряжением 48 В.
2. Важнейший параметр: высокий выходной ток. NEMA 23 имеют рабочие токи вплоть до 3,5 А, драйвер должен обеспечивать этот ток с запасом 30%. Путём нехитрых расчётов получаем максимальный рабочий ток около 4,5 А.
3. Простая и оперативная подстройка силы выходного тока.
4. Наличие микростеппинга, как минимум 1/8 шага
5. Наличие защиты от КЗ, перегрева, и т.д.
6. Небольшой размер, возможность крепления произвольного радиатора.
7. Исполнeние в виде интегральной схемы. XXI век на дворе!
8. Простая схема включения с минимальным количеством дискретных компонентов.
9. Низкая цена.
После множества бессонных ночей пятиминутного копания в Google выяснилось, что единственной доступной микросхемой драйвера с подходящими параметрами является TB6600HG. Покупка готового китайского драйвера на eBay показала, что не всё ладно в датском королевстве, далеко не всё. В частности, китайский драйвер отказался напрямую работать с выходами Arduino Due, и «завёлся» только через буферный преобразователь уровней. При работе с трёхамперной нагрузкой драйвер грелся и терял шаги десятками. Вскрытие пациента показало, что в нём не только была установлена микросхема предыдущего поколения (TB6560), а даже и термопаста не смогла найти себе места в списке компонентов. К тому же размерами и весом китайский драйвер наводил меня на мысли о моей молодости… о прошлом веке, если быть совсем точным. Ну нафиг, сказал во мне интеллигент в третьем поколении, мы сделаем свой драйвер, с преферансом и поэтессами. Если бы разработчики KiCAD видели, как я обращаюсь с их детищем, я разорился бы на одних только адвокатах:
С целью минимизации размеров была спроектирована четырёхслойная печатная плата. Этот факт, к сожалению, исключает её изготовление в домашних условиях. Посему на берлинской фирме LeitOn были заказаны 36 таких плат, каждая из которых обошлась в итоге около пяти евро. Часть этих плат были впоследствии выкуплены у меня собратьями по увлечению, и в итоге изготовление плат вышло не слишком накладным предприятием. Микросхемы TBB6600HG были заказаны на Aliexpress по 4 евро за штуку, остальные компоненты были заказаны на eBay, в пересчёте на один драйвер цена дискретных компонентов составила 2 евро. В качестве радиаторов были взяты пятисантиметровые отрезки П-образного алюминиевого профиля, пластиковые каркасы были отпечатаны на 3D принтере. Итого цена одного драйвера составила около 12 евро. Это справедливая цена за драйвер со следующими характеристиками:
Напряжение питания от 8 до 42 Вольт
Максимальный долговременный рабочий ток 4,5 Ампер, устанавливается потенциометром
Микростеппинг вплоть до 1/16 шага
Защита: КЗ, перегрев, низкое напряжение питания
Компактные размеры и низкий вес
Работа с уровнями входных сигналов от 3,3 до 5,5 вольт
Простая установка микростеппинга с помошью микропереключателей — к чёрту перемычки!
Готовые печатные платы:
Собранные и недособранные драйверы.
Видео работы драйвера в моём старом 3D принтере. Здесь трёхамперный NEMA 17 бодро гоняет подогреваемую рабочую площадку принтера размером 45 х 25 см через шестнадцатимиллиметровый шпиндель длиной 60 см:
Финальное фото: самодельные драйвера на своём рабочем месте в моём новом 3D принтере.
Публикуется под лицензией WTFPL

Если вы использовали шаговые двигатели, оборудованные только для полных шагов, чтобы достичь полушага, электромагнитные катушки будут постоянно получать и терять мощность, а вал будет колебаться между двумя катушками примерно на полпути. Это колебание вызовет сильную вибрацию, создающую много шума. Чем лучше микрошаговые возможности драйвера шагового двигателя, тем меньше вибраций он будет производить и тем тише будет работать принтер.
Существует множество различных марок и моделей драйверов шаговых двигателей, и все они различаются по качеству и эффективности. В этой статье мы рассмотрим несколько различных драйверов шагового двигателя, которые отлично подходят для 3D-принтеров.
TMC2208
Драйверы TMC2208 распространены в материнских платах 3D-принтеров, таких как плата Creality V1.1.5, и пользователи отметили, что они эффективны для снижения шума вашего принтера.
К сожалению, драйверы TMC2208 несовместимы с функцией линейного продвижения Marlin , которая может улучшить экструзию вашего устройства для повышения точности размеров печати. Хотя это и является недостатком, эти драйверы могут обрабатывать точные 1/256 микрошагов, что является более или менее отраслевым стандартом для драйверов шаговых двигателей более высокого уровня. Этот низкий микрошаг может помочь вашей машине в печати более мелких детаталей.
TMC2209

Драйверы TMC2209 могут быть подключены к материнским платам открытого типа.
В драйверах TMC2209 являются улучшенной версией Trinamic управления перемещениями по драйверам TMC2208, с некоторыми новыми функциями , над своим предшественником. Как и большинство современных драйверов шагового двигателя, драйверы TMC2209 делают ваш 3D-принтер очень тихим, и вы можете найти их на некоторых материнских платах, таких как BigTreeTech SKR E3 V1.1.
A4988
Драйвер A4988 один из старейших этого списка, разработанный Allegro MicroSystems. Хотя драйвер модели A4988 не является последней или лучшей моделью драйвера, это надежный вариант для 3D-принтеров.
Драйверы A4988 не сделают ваши двигатели такими же тихими, как новые драйверы (например, TMC2209), и их можно найти интегрированными в материнские платы более низкого уровня, такие как самые ранние платы Creality Ender 3 (V1.1.2 и V1.1.3). В зависимости от производителя, эти драйверы обычно имеют рейтинг до 1/16 микрошага, что конечно не выделяется из толпы, но может соответствовать вашим минимальным требованиям.
В отличие от большинства современных драйверов, драйверы A4988 не имеют многих совместимых режимов, что означает, что они не смогут выполнять некоторые функции 3D-печати (например, линейное продвижение). Также в некоторых обзорах пользователи отмечали, что регулировка потенциометров драйвера (инструмент делителя напряжения) может быть затруднена.
TMC2100
Драйверы TMC2100 сильно греются при печати.
Драйвер TMC2100 другая модель от Trinamic управления движением и является отличным вариантом для тех, кто ищет сочетание между производительностью и ценой. Драйверы TMC2100 очень популярны в сообществе 3D-печати и популярный производитель, такой как Thomas Sanladerer, дал положительный отзыв о модели драйвера. Этот тип драйвера довольно эффективен для снижения шума вашего принтера, и эти драйверы обычно подключаются к материнской плате, а не интегрируются в печатную плату.
Драйверы TMC2100 могут обрабатывать всего 1/256 микрошага, что отлично подходит для умеренной цены на эти драйверы. Просто имейте в виду, что эти драйверы, как правило, сильно нагреваются и пропускают шаги в режиме StealthChop, согласно TeachingTech.
Драйверы TMC2100 могут использоваться в нескольких режимах драйверов, включая StealthChop и SpreadCycle. Фактически эта модель драйвера была одним из первых драйверов TMC, способных работать в режиме SpreadCycle, уникальном рабочем режиме управления током.
DRV8825

Драйверы DRV8825 могут быть добавлены к существующей материнской плате, если они открыты.
Драйвер DRV8825 производится Texas Instruments (производителем различных микросхем для компьютеров и другой электроники). Он сопоставим по цене с драйверами Allegro A4988, поэтому очень доступен по сравнению с более новыми вариантами. Драйверы DRV8825, как и многие старые драйверы, обычно добавляются на материнские платы с открытым дизайном и не интегрируются в плату.
Драйвер DRV8825 достаточно эффективен для снижения шума двигателей вашего принтера, что впечатляет, учитывая когда была сделана модель DRV8825. Однако важно отметить, что этот тип драйвера по-прежнему не такой тихий, как многие новые модели.
Драйверы DRV8825 имеют довольно низкий рейтинг микрошага 1/32, но этого должно хватить, если вы печатаете детали с ограниченной детализацией. Однако, по мнению некоторых обозревателей, известно, что эти драйверы вызывают заметные дефекты на поверхности 3D-модели. Это существенный недостаток, потому что ваши драйверы не должны беспокоить вас при настройке вашего 3D-принтера.
TMC2130
Некоторые принтеры Prusa, а также сборки клонов Prusa используют драйверы TMC2130.
Эти драйверы TMC2130 еще одна популярная модель драйвера, наиболее часто встречаются под капотом Prusa Research , принтеров и Prusa клонов. В то время как большинство драйверов предназначены для самых разных целей управления движением, Trinamic Motion Control разработала TMC2130 специально для 3D-принтеров.
Драйверы этого типа являются более дорогими по сравнению с драйверами шаговых двигателей, но недостаток в доступности компенсируется качеством. Драйверы TMC2130 могут сделать ваш 3D-принтер очень бесшумным, и это не осталось незамеченным в сообществе 3D-печати, и производители отметили, что они могут слышать только шум вентилятора .
Драйвер модели TMC2130 поддерживает 1/256 микрошага и может работать в режиме StealthChop или SpreadCycle. Эта модель драйвера также оснащена несколькими различными технологиями TMC, включая StallGuard2, CoolStep, обнаружение остановки, защиту от короткого замыкания, ChopSync и пассивное прерывание. Эти функции могут улучшить качество печати вашей машины, повысив производительность вашего драйвера и сделав его более надежным и интеллектуальным, например, измерение нагрузки шагового двигателя.
TMC2225
Найдено в популярной Creality V4.2.7 немого борту , KingRoon KP3S платы и других последних материнских платах 3D принтеров, TMC2225 драйверы представляют собой отличный вариант для бесшумной печати по доступной цене. Эти драйверы настолько тихие, что многие обозреватели платы V4.2.7 отметили, что драйверы TMC2225 настолько заглушили двигатели своих принтеров, что они могут слышать только шум вентилятора.
В зависимости от конкретного типа драйвера TMC2225, драйвер может обрабатывать до 1/256 микрошагов (плата V4.2.7 рассчитана на 1/32), что отлично подходит для точной печати моделей. Обратной стороной этой модели драйвера является то, что он не работает с функцией линейного продвижения Marlin при подключении в автономном режиме.
LV8729
Некоторые производители смогли использовать драйверы LV8729 для очень быстрой печати.
Эта модель имеет несколько улучшенных функций по сравнению с драйвером A4988, но все же уступает по калибру (и цене) некоторым другим из нашего списка. Судя по звуку из теста TeachingTech , этот драйвер громче, чем большинство современных драйверов, но немного тише, чем драйвер A4988. Тем не менее, некоторые пользователи утверждали, что драйвер довольно хорошо справляется с высокими скоростями (например, 170 мм / с).
Драйвер LV8729 может работать с шагом 1/128 микрошага, что делает драйвер идеальным для достижения большей точности размеров при невысокой стоимости. Модель драйвера LV8729 также требует минимального количества проводов для достижения этого значения микрошага, но драйвер не имеет многих других функций или дополнительных режимов.
Читайте также: