
Разборка шагового двигателя от принтера
Обновлено: 16.05.2024
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Результатами своих поисков и экспериментами я поделюсь в этой статье.
Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:

Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:

Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.

Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал.
Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан).
Вот как выглядит собранная схема на макетной плате:

И вот так расположен наш подопытный:

Теперь можно приступать к экспериментам.
Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В:
I=U/R = 5В/26Ом = 190мА
Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться.
Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Исходный код программы выглядит следующим образом:
Полношаговый режим. Одна фаза
Двигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая?
Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их.
Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин.
Полношаговый режим. Две фазы
Обратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае).
Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает. Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил.
Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин.
Надо сказать, что для шагового двигателя он довольно шустрый. Это связано с малым количеством магнитных полюсов на роторе.
Эксперимент №2. TMC2208 + ATtiny44
TMC2208 — название микросхемы-драйвера для управления биполярными шаговыми двигателями, аналогично называется модуль на её основе, который выпускается для установки в самодельные (и не только) 3D принтеры и имеет унифицированное расположение выводов.
Много и доходчиво сказано про этот модуль вот здесь.
В интернете много написано про то, как установить его в свой 3D принтер, но нас интересует как подключить модуль к микроконтроллеру, потому давайте разбираться.
Характеристики микросхемы впечатляют (только впечатлительных людей):
- напряжение питания логической части: 3-5В;
- напряжение питания двигателя 5.5-36В;
- пиковый ток 2А;
- настройка максимального тока двигателя;
- поддержка интерфейса UART как для управления, так и для конфигурирования внутренних регистров;
- автоматическое отключение питания;
- поддержка микрошагового режима управления двигателем вплоть до 1/16 шага.
Управлять ей очень просто, по сути нужно всего два пина микроконтроллера. Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг.
Схема подключения будет выглядеть так:

Дополнительно я использовал пин EN, чтобы отключать моторчик и длительное время не держать обмотки под напряжением.
Перед тем как всё запустить нужно произвести предварительную настройку модуля. Во-первых, выставить желаемый режим микрошага. Во-вторых, выставить желаемый максимальный ток двигателя.
С микрошагом всё просто. За это отвечают пины MS1 и MS2.

Отмечу, что микросхема не скачкообразно меняет напряжение, а делает это «плавно», но так как микросхема цифровая, то на выходе у нас не гладкий сигнал, а сигнал с маленьким шагом, если верить документации, то каждый шаг она разбивает на 256 микрошагов. Сделано это для увеличения плавности хода, снижения шумов от двигателя и по идее не должно позволять конструкции, к которой он прикручен, входить в резонанс. Короче, всё для того, чтобы 3D принтер работал тише.
Чтобы выставить ток двигателя необходимо измерить напряжения на контакте Vref, который указан на рисунке. Изменить значение напряжения можно при помощи потенциометра, установленного рядом с контактом. Напряжение на контакте будет пропорционально току двигателя, и зависимость будет иметь следующий вид:
Нашему моторчику нужно примерно 150мА, потому Vref = 0,216В. Устанавливаем…
Подразумевается, что увеличение тока микросхема обеспечивает за счёт увеличения напряжения на обмотке. Потому, нужно позаботиться о том, чтобы этого напряжения хватило. Но, полагаю, для того маленького моторчика должно хватить и 5В.
Протестируем работу моторчика с различными режимами микрошага и посмотрим что получится (пауза между микрошагами 10мс):
Можно заметить, что движения моторчика стали более плавными (по сравнению с предыдущим экспериментом), однако характерные 16 шагов всё равно наблюдаются довольно чётко. Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов.
Ещё необходимо отметить, что моторчик в этом режиме нагревается почти также сильно, как в полношаговом режиме с двумя фазами. Оно и понятно, обмотки постоянно находятся под напряжением, непрерывно происходит выделение тепла.
Полагаю, для таких моторчиков использование такого драйвера, да и вообще режимов микрошага не очень целесообразно.
Эксперимент №3. ATtiny44-драйвер
Вернёмся ненадолго к первому эксперименту и вспомним, что входы EN1 и EN2 микросхемы драйвера подключены к пинам OC0A и OC0B микроконтроллера. Это значит, что мы можем подать туда ШИМ сигнал, генерируемый при помощи таймера TIMER0 и таким образом изменять напряжение, прикладываемое к обмоткам двигателя и соответственно регулировать ток, который будет протекать через них.
Согласно даташиту на микроконтроллер ATtiny44 максимальный ток, который может выдать один пин составляет всего 40мА. Причём не указано для какого вида тока (пульсирующего или постоянного) эта характеристика. Просто она есть и она вот такая…
Надо сказать, что я более 7 лет знаком с микроконтроллерами фирмы ATMEL. И ни разу у меня не возникло желания проверить эту строчку из даташита.

Возможно, производитель просто подстраховывается и на самом деле он может выдать больше, а может это действительно максимум, что может выдать один пин.
Мы это выясним. Но сначала нужно выяснить при каком минимальном токе моторчик вообще способен вращаться.
Используя схему из первого эксперимента, подгоняем значение тока через обмотки равное 40мА. Запускаем в полношаговом режиме с двумя фазами (так как будет выше крутящий момент):
Отлично! При 40мА двигатель успешно запустился! Был также выявлено минимальное значение тока обмоток, необходимое для устойчивой работы мотора, и равно оно 30мА.
Разумеется, крутящий момент будет значительно ниже, но для нас важен сам факт того, что удалось запустить моторчик с таким маленьким энергопотреблением.
Схема подключения шагового двигателя к микроконтроллеру будет следующей:

Поскольку каждый пин микроконтроллера работает как полумост (может коммутировать вывод микросхемы либо на Vcc, либо на GND), то для управления биполярным шаговым мотором нам понадобиться 4 пина микроконтроллера.
Немного поясню как работает эта программа. Это модифицированный код из первого эксперимента. Как я говорил выше, будет использован 8 битный TIMER0 для генерирования ШИМ сигнала на выходах OC0A и OC0B. Таймер настраивается в режим FastPWM с предделителем на 8 (частота сигнала при 8МГц тактового генератора микроконтроллера составляет 3906Гц).
Чтобы изменять полярности сигналов на обмотках происходит переключение пина микроконтроллера от Vcc к GND изменением соответствующего бита в регистре PORTx и изменением коэффициента заполнения ШИМ путём записи значений в регистры OCR0A и OCR0B (значения подбирались экспериментально).
Курс схемотехники, прослушанный на первом курсе института подсказывает, что мультиметр показывает среднеквадратическое значение напряжения и тока в двигателе.
Шаговый двигатель вращается от пинов микроконтроллера без драйверов!
Но здесь мы не выходим за пределы возможностей микроконтроллера, по крайней мере, если верить тому, что пишут в документации. В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера).
Отбросим все предосторожности
Уберём из эксперимента ШИМ и будем напрямую управлять пинами микроконтроллера при помощи регистров PORTx. Посмотрим что будет с микроконтроллером после этого.
Работает… с максимальным током в 51мА… Что же… неожиданно, похоже это и есть предельный ток, который может отдать один пин микроконтроллера? Если я ошибаюсь, поправьте меня.
В любом случае, ролик с ютуба не обманул. Действительно можно управлять этим моторчиком без всяких драйверов.
Выводы
Мы подробно изучили миниатюрные биполярные шаговые моторчики, их конструкцию и способы управления ими, для использования в собственных приложениях.
1. Миниатюрный биполярный шаговый мотор с ротором из постоянных магнитов действительно миниатюрный.
Его основные особенности:
- малое количество магнитных полюсов, как следствие, малое количество шагов (у моего, напомню, всего 16);
- относительно большая скорость вращения (следствие из предыдущего пункта), в эксперименте удалось достичь 1875 об/мин;
- неудовлетворительно работает в микрошаговых режимах (не удерживается промежуточное положение ротора);
3. Использование специализированного драйвера TMC2208 является спорным вопросом, так как микрошаговый режим не поддерживается самим двигателем, хотя переходы между шагами выполняются более плавно.
4. Возможно подключение шагового двигателя непосредственно к портам микроконтроллера. Но это только в рамках эксперимента, так как крутящий момент в данном случае совсем незначителен, да и малый ток не позволяет совершать шаги с большой скоростью.
В следующий раз расскажу, для чего именно нам потребовались такие маленькие шаговые моторчики.
Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.
Последние посетители 0 пользователей онлайн
Объявления

"По итогам беседы в Минске сообщили, что стороны достигли понимания в том, что проблема должна быть вынесена на уровень Белоруссия — ЕС, они договорились определить лиц, которые займутся переговорами." Всё-таки он своего добился.

Подскажите, как определить оптимальную частоту преобразователя на UC3842, в котором использую готовый трансформатор от непонятно какого БП, скорее всего для 12В светодиодных лент и мощностью 50-70вт. В принципе все работает, но на какие параметры нужно смотреть для при выборе частоты?
Чувство общности „мы“ оно естественное и характерное человеку как животному социальному. Даже обезьяны живут стаями. Например в Индии, часть обезьян отвлекает внимание человека, а другая ворует еду. Разные стаи обезьян между собой дерутся. У людей это чувство общности почти всегда появляется например в поезде между попутчиками в одном купе. Но у людей люди власти это чувство общности частенько используют чтобы обмануть. Например Соловьев использует противопоставление мы и они строит из себя патриота, очень экпрессивен и многие россияне чувствуют общность с ним. Но он ведь живет в Италии, семья и дом его там. Будущее его детей в Европе. А по тв он показывает совсем другое и постоянно мы противостоим Украине и западному миру, но никакие внутренние российские проблемы в этой искусственной общности Соловьёва не обсуждаются. Его не волнует не повышение налогов, ни падение рубля, не пресование бизнеса , не как следствие всего этого рост цен и снижение качества продуктов. На примерах про тот сбитый боинг я лично в первую правду поверил. Но когда вдруг начали показывать испытания взрыва бука я понял, что меня раньше обманули и скорее всего обманывают и сейчас. Очень ведь маловероятно, что низколетящиий су25 сбил высоколетящий боинг одновременно с ракетой бук! Вот так, правды про боинг я самостоятельно узнать не могу, но понять, что мне лгут выдавая за правду могу.

Выше были рассмотрены наиболее важные общие вопросы использования шаговых двигателей, которые помогут в их освоении. Но, как гласит наша любимая украинская поговорка: «Не повірю поки не провірю» («Не поверю, пока не проверю»). Поэтому перейдем к практической стороне вопроса. Как уже отмечалось, шаговые двигатели – это удовольствие не из дешевых. Но они имеются в старых принтерах, считывателях гибких и лазерных дисков, например, SPM-20 (шаговый двигатель для позиционирования головки в дисководах 5"25 Mitsumi) или EM-483 (от принтера Epson Stylus C86), которые можно найти у себя в старом хламе или купить за копейки на радиобазаре. Примеры таких двигателей представлены на Рисунке 8.
Наиболее простыми для начального освоения являются униполярные двигатели. Причина кроется в простоте и дешевизне их драйвера управления обмотками. На Рисунке 9 приведена практическая схема драйвера, использованного автором статьи для униполярного шагового двигателя серии P542-M48 [6].
| Рисунок 9. | Драйвер униполярного шагового двигателя. (Дополнительная информация по подключению на Рисунках 10 и 12). |
Естественно, что выбор типа транзистора для ключей управления обмотками должен происходить с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое соединение MOSFET с ИМС коммутатора может быть недопустимым. Как правило, в затворах устанавливаются последовательно включенные резисторы небольших номиналов. Но в ряде случае необходимо предусмотреть еще и соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с небольшим током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить, по крайней мере, 15 мА (хотя для нормальной работы ключа необходимо, чтобы ток базы равнялся 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы. Как хороший компромисс, можно использовать IGBT, сочетающие в себе достоинства полевых и биполярных транзисторов.
С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC(ON) MOSFET, но с учетом рекомендаций, описанных выше. Мощность, рассеиваемая на ключах для выбранного в качестве примера двигателя серии P542-M48, при полной остановке ротора не превысит
Транзисторы IRLML2803 с RDC(ON) = 0.25 Ом имеют допустимую мощность рассеяния 540 мВ и постоянный ток стока 0.93 А при температуре 70 °С. Так что, они полностью соответствуют требованиям и обеспечат надежную работу драйвера. В большинстве случаев, учитывая низкие частоты коммутации, проведенной выше оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их выбора и полного расчета можно воспользоваться методикой, приведенной, например, в [7].
Еще одним важным моментов является правильный выбор так называемых снаберных диодов, шунтирующих обмотку двигателя (VD1…VD4 на Рисунке 9). Назначение этих диодов – гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом. Обратите внимание, что в мощные MOSFET такие диоды, как правило, уже встроены.
Режим управления двигателем задается коммутатором. Как уже было отмечено выше, наиболее удобным и эффективным является управление с перекрытием фаз (Рисунок 4б). Такой режим легко реализуется при помощи триггеров. Практическая схема универсального коммутатора, который использовал автор статьи как в ряде отладочных модулей (в том числе, и с приведенным выше драйвером), так и для практических применений, приведена на Рисунке 10.
| Рисунок 10. | Схема универсального коммутатора шагового двигателя (с реверсом). |
Схема на Рисунке 10 пригодна для любых типов двигателей (униполярных и биполярных). Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «ШАГИ», а направление вращения устанавливается через вход «НАПРАВЛЕНИЕ». Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки (на Рисунке 10 они не показаны). Временная диаграмма работы коммутатора приведена на Рисунке 11.
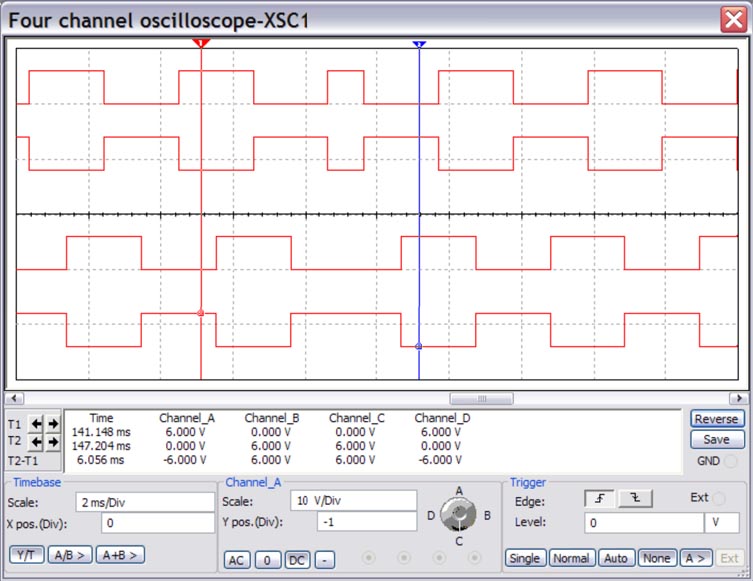 | |
| Рисунок 11. | Временная диаграмма универсального коммутатора с реверсом. Верхние две осциллограммы – Q1 D2-2, Q2 D2-2; нижние две – Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз. |
Хочу обратить внимание читателей: в Интернете вы могли встретить похожую схему, выполненную не на D-триггерах, а на JK-триггерах. Будьте внимательны! В ряде этих схем допущена ошибка в подключении ИМС. Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (см. Рисунок 12), при этом частота вращения останется неизменной, а диаграмма управления будет аналогичной той, которая приведена на Рисунке 11 (осциллограммы до переключения очередности фаз).
| Рисунок 12. | Упрощенная схема коммутатора шагового двигателя (без реверса). |
Поскольку особых требований к сигналу «ШАГИ» не предъявляется, для его формирования может использоваться любой подходящий по уровням выходного сигнала генератор. Для своих отладочных модулей автор использовал генератор на базе ИМС таймера 555 (Рисунок 13).
| Рисунок 13. | Регулируемый генератор импульсов для коммутатора шагового двигателя. |
Для питания собственно двигателя можно использовать схему, приведенную на Рисунке 14, а схему коммутатора и генератора питать или от отдельного источника питания +5 В или через дополнительный маломощный стабилизатор. Земли силовой и сигнальной частей в любом случае необходимо разделить.
| Рисунок 14. | Схема питания шагового двигателя с режимами удержания и выключения. |
Схема на Рисунке 14 обеспечивает подачу двух стабильных по уровню напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания. (Формулы, необходимые для расчета выходного напряжения, приведены в [8]). Рабочий режим включается подачей высокого логического уровня на контакт «ТОРМОЗ» разъема Х1. Допустимость снижения напряжения питания определяется тем, что, как уже отмечалось в первой части статьи, момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя P542-M48 момент удержания с редуктором 25:6 равен 19.8 Н·см, а момент вращения всего 6 Н·см. Этот подход позволяет при остановке двигателя уменьшить потребление мощности с 5.52 Вт до 1.38 Вт! Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт «ВКЛ/ВЫКЛ» разъема Х1.
Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах VT1, VT2 необходимости нет, и выходы можно подключить непосредственно вместо упомянутых ключей.
Примечание: В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автор использовал катушку SDR1006-331K (Bourns). Общее питание формирователя напряжения для обмоток двигателя можно уменьшить до 16 – 18 В, что не скажется на его работе. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания.
Задача управления биполярными двигателями более сложна. Основная проблема в драйвере. Для этих двигателей требуется драйвер мостового типа, и делать его, тем более в современных условиях, на дискретных элементах – неблагодарная задача. Да, этого и не требуется, так как имеется очень большой выбор специализированных ИМС. Все эти ИМС условно можно свести к двум типам. Первый – весьма популярная у любителей робототехники ИМС L293D STMicroelectronics [9] или ее варианты от Texas Instruments. Они относительно недороги и подходят для управления маломощными двигателями с током обмоток до 600 мА. ИМС имеют защиту от перегрева; устанавливать ее необходимо с обеспечением теплоотвода, которым служит фольга печатной платы [9]. Второй тип – это уже знакомая читателям по публикации в [1] ИМС LMD18245 [2].
Автор использовал драйвер L293DD в схеме для управления биполярным двигателем малой мощности типа 20M020D2B 12 В/0.1 А во время изучения проблемы использования шаговых двигателей. Этот драйвер удобен тем, что содержит четыре полумостовых ключа, поэтому для управления биполярным шаговым двигателем требуется всего одна ИМС. Полная схема, приведенная в [10] и многократно повторенная на интернет-сайтах, пригодна для использования в качестве тестовой платы. На Рисунке 15 показано включение ИМС драйвера (с привязкой к коммутатору из Рисунка 10), поскольку именно эта часть сейчас представляет для нас интерес, а Figure 6 (Bipolar Stepping-Motor Control) из спецификации [9] не совсем понятна начинающему пользователю. Она вводит в заблуждение, например, тем, что показаны внешние диоды, которые на самом деле встроены в ИМС и прекрасно справляются с обмотками маломощных двигателей. Естественно, что драйвер L293D может работать с любым коммутатором. Выключается драйвер логическим нулем по входу R.
Примечание: ИМС L293, в зависимости от изготовителя и суффиксов, указывающих на тип корпуса, имеют различия в нумерации и количестве выводов!
| Рисунок 15. | Схема подключения драйвера L293DD. |
Для более мощных двигателей автор статьи использовал драйверы LMD18245. Полная схема тестового модуля приведена на Рисунке 16.
| Рисунок 16. | Схема управления биполярным шаговым двигателем с использованием драйвера LMD18245. |
В отличие от L293DD, LMD18245 является не четырех-, а двухканальным драйвером, поэтому для реализации схемы управления требуются две ИМС. Драйвер LMD18245 выполнен по DMOS технологии, содержит схемы защиты от перегрева, короткого замыкания и выполнен в удобном 15-выводном корпусе ТО-220, что позволяет легко отводить от его корпуса излишнее тепло. В качестве задающего генератора использовалась схема, приведенная ранее на Рисунке 13, но с увеличенным до 4.7 кОм сопротивлением резистора R2. Для подачи одиночных импульсов используется кнопка BH1, позволяющая сдвинуть ротор двигателя на один шаг. Направление вращения ротора определяется положением переключателя S1. Включение и выключение двигателя осуществляется выключателем S2. В положение «ВЫКЛ» ротор двигателя освобождается, и его вращение импульсами управления становится невозможным. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Если импульсы управления не подаются, то ротор двигателя остается в зафиксированном положении с пониженной вдвое мощностью потребления. Если же импульсы подаются, то вращение двигателя в этом режиме осуществляется с пониженным на малых скоростях вращения моментом. Необходимо заметить, что поскольку при полношаговом управлении «two-phase-on» включены обе обмотки, ток двигателя удваивается, а схема драйвера должна рассчитываться исходя из требований обеспечения заданного тока двух обмоток (резисторы R3, R8).
Схема содержит описанный ранее двунаправленный двухфазовый формирователь на D-триггерах (Рисунок 10). Максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245 (резисторы R3, R8), и двоичным кодом на контактах цепи управления тока (выводы 8, 7, 6, 4). Формула для расчета максимального тока приведена в спецификации на драйвер [2]. Ограничение тока осуществляется импульсным методом. При достижении максимально заданной величины тока выполняется его «нарезка» («chopping»). Параметры этой «нарезки» задаются параллельной RC цепочкой, подключенной к выводу 3 драйвера. Достоинством ИМС LMD18245 является то, что токозадающий резистор, не включенный непосредственно в цепь двигателя, имеет достаточно большой номинал и маленькую рассеиваемую мощность. Для рассматриваемой схемы максимальный ток в амперах, согласно приведенной в [2] формуле, составляет:
VDAC REF – опорное напряжение ЦАП (в рассматриваемой схеме 5 В);
D – задействованные разряды ЦАП (в этом режиме используются все 16 разрядов);
RS – сопротивление токоограничивающего резистора (R3 = R8 = 10 кОм).
Соответственно, в режиме удержания (поскольку используются 8 разрядов ЦАП), максимальный ток составит 1 А.
В заключение необходимо отметить, что драйвер LMD18245 позволяет реализовать и микрошаговое управление. Как упоминалось выше, такой режим уменьшает, и даже подавляет паразитный резонанс ротора. Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП.
Как можно видеть из предложенной статьи, шаговые двигатели хоть и сложнее в управлении, чем коллекторные, но не настолько, чтобы отказываться от них. Как говорили еще древние римляне: «Дорогу осилит идущий». Естественно, что на практике для многих приложений управление шаговыми двигателями целесообразно делать на основе микроконтроллеров, которые легко сформируют нужные команды для драйверов и выполнят роль коммутаторов. Дополнительную информацию и более детальное рассмотрение проблем, связанных с применением шаговых двигателей, кроме как по упомянутым выше ссылкам [3, 4, 7], можно почерпнуть из ставшей уже классикой монографии Кенио Такаши [11] и на специализированных интернет-сайтах, например, [12].
Есть еще один момент, на который автор статьи хотел бы обратить внимание читателей. Шаговые двигатели, как впрочем, и все двигатели постоянного тока, обратимы. Что имеется ввиду? Если приложить внешнее вращающее усилие к ротору, то с обмоток статора можно снять ЭДС, то есть двигатель становится генератором, причем весьма и весьма эффективным. Автор статьи экспериментировал с этим вариантом использования шаговых двигателей во время работы консультантом по силовой электронике в компании, занимающейся ветроэнергетикой. Необходимо было на простых макетах отработать ряд практических решений. По наблюдению автора статьи, эффективность шагового двигателя в таком применении была выше, чем у аналогичного по параметрам и габаритам коллекторного двигателя постоянного тока. Но это уже другая история.

Мощности шагового двигателя нам не хватало, но нужна была его точность. В качестве эксперимента мы решили разобрать шаговый мотор, хотя это никто не рекомендует делать и одеть на него лишний редуктор с аккумуляторной отвёртки. Ах-да, разобрать шаговый мотор нам пришлось, чтобы правильно сточить его вал, и надеть на него шестерёнку редуктора. В итоге мотор был разобран.
Вал аккуратно затянуть в тиски через мягкие прокладки, и мы принялись за работу напильником. Это была самая ответственная операция,нужно было не переточить вал, и придать ему необходимую форму.
После длительное работы напильником, получилось просто идеально. Шестерёнка оделась с натягом, не болталась. Теперь осталось только придумать, как же можно закрепить сам редуктор к корпусу шагового двигателя. Этим займёмся позже
1 комментарий к “Разбираем шаговый двигатель”
Есть альтернатианвй вариант крепления шестерни без разборки двигателя. Я делал переходную втулку из латуни. С одной стороны она надевалась на вал и фиксировалась, с другой имела нужное утоньшение под шестиренку.
Минус такой переделки : удлинение вала на величину шестерни.
Оставьте комментарий Отменить ответ
Follow Me

Error: API requests are being delayed for this account. New posts will not be retrieved.
Log in as an administrator and view the Instagram Feed settings page for more details.
Читайте также: