
Pid что это на клавиатуре
Обновлено: 06.07.2024
В этой статье я продолжаю рассказывать о полезных возможностях командной строки операционной системы windows.
Для запуска командной строки по-прежнему используем сочетание клавиш Win+R, затем в появившемся окне пишем cmd и жмем Enter либо кнопку OK.
1 Удаление файлов с жесткого диска без следов
Многим известно, что когда вы удаляете файл с жесткого диска, то по факту он не стирается из ячеек памяти, и при желании его можно восстановить с помощью специальных программ, таких как Recuva, например. (При том условии, что эти ячейки не были перезаписаны другими файлами). В командной строке windows существует команда Cipher, которая предназначена для шифрования и дешифрования данных, но ее можно использовать и для полной очистки жесткого диска от любых данных. Команда перезапишет ячейки памяти мусорными данными. Например, если вам необходимо стереть все следы с диска D, то введите в командную строку следующую команду:
Вместо "D" можете ставить букву другого жесткого диска при необходимости. Например, если вам нужно очистить диск E, то пишем:
Теперь на вашем диске гарантированно не осталось никаких следов.
2 Список всех интернет-соединений
Команда netstat выводит список всех интернет-соединений данного компьютера. Ее можно использовать, например, для отслеживания сетевой активности программ, выявления активности вирусов. Для просмотра данного списка просто вводим команду без каких-либо параметров:
3 Проверка и исправление ошибок файловой системы
Команда chkdsk поможет для поиска и исправления ошибок в файловой системе. Она может решить проблемы, связанные с синим экраном, если они вызваны ошибками в файловой системе.
Если ввести команду без параметров, то она просто будет сканировать диск в режиме чтения, никак не исправляя ошибки.
Для автоматического исправления введите:
chkdsk D : /f /r
/f - указывает, что необходимо произвести автоматическое исправление ошибок.
/r - включает восстановление поврежденных секторов диска.
4 Завершить процесс принудительно
Команда taskkill принудительно завершает процесс. Для этого нужно указать PID (идентификатор) процесса, который можно узнать, запустив команду tasklist.
В появившемся списке смотрим PID процесса, который нужно закрыть, затем вводим команду:
taskkill /PID 4396
Где 4396 заменить на нужный PID .
5 Запуск виртуальной клавиатуры
Команда osk запускает виртуальную клавиатуру. Может быть полезна, например, при отказе реальной клавиатуры. У вас может возникнуть вопрос, как ввести эту команду, если клавиатура не работает. Все просто, можно заранее создать cmd файл для запуска этой команды, и открывать его мышкой при необходимости. Об этом я рассказывал в первой части статьи.
Первую часть вы можете прочесть по этой ссылке .
Бонус
Если в конце любой команды поставить параметр /? , то появится помощь по этой команде и описание ее параметров.
Команда cls полезна для очистки командной строки.
Если статья вам понравилась или была полезной, пожалуйста, поддержите автора лайком и подпиской на канал.
Разрабатывается электронное устройство, которое будучи подключенным к датчику выполняет измерение микроперемещения и передаёт результат на ПК, где он выводится в удобной для оператора графической форме. Область применения измерительного прибора — машиностроение.
Немного о том, как всё работает
На схеме показаны основные действующие лица, участвующие в жизни разрабатываемого прибора.
Микроконтроллер — основной элемент устройства, который подаёт управляющие сигналы на датчик и принимает отклик, по которому вычисляет результат измерения. С помощью реализованного стека USB обмен данными с хостом сводится практически к работе с буферами чтения и записи. Ввиду того, что измерительный алгоритм не требует больших вычислительных мощностей и период одного измерения равен 100-150 мс выбран микроконтроллер at90usb162 (8 бит, 16 МГц, 16 кБ). В этом МК есть аппаратная поддержка USB, что значительно упрощает программную реализацию стека USB. В прочем, реализовывать стек и заниматься инициализацией МК мне не пришлось благодаря примеру USB Generic HID Implementation из сопроводительного пакета ПО. Из альтернатив фирменным примерам для AVR есть фреймворк LUFA (лицензия MIT) для AT90USBxxxx и ATMEGAxxUx и полностью программная реализация стека V-USB (GPL или коммерческая лицензия), позволяющая работать с AVR-овскими МК без аппаратной поддержки USB.
Немножко о аббревиатуре HID. Это класс USB-устройств, предназначенных для ввода данных человеком: клавиатура, мышь, игровые контроллеры. Предполагается, что у таких устройств небольшой объем передаваемой информации, как и у разрабатываемого устройства: пакеты по 8 байт с интервалом в 100-150 мс. Главное удобство работы с устройствами этого класса — наличие стандартного драйвера в ОС, что освобождает от написания своего.
Хостом (мастером, ведущим) в моём случае является ПК, а точнее встроенный в материнку контроллер USB. Согласно дескриптору (описанию) моего устройства хост опрашивает его на предмет новых посылок с периодом примерно в 20 мс. Прикладное ПО собирает принятые хостом данные, проводит небольшую обработку и рисует индикаторы, напоминающие автомобильные спидометры, на которых показываются измеряемые величины. Выводится список подключенных датчиков и их настройки, которые можно изменить: изменения будут переданы на устройство и сохранены в энергонезависимой памяти.
Управление компьютером кажется простым занятием, но так ли это? Километры машинного кода, организация взаимодействия программ, ресурсов и пользователя. Важно не только создать жизнеспособную среду, но и придать ей возможность дальнейшего развития и оптимизации. Разработчикам же остается использовать доступный инструментарий.
Функции операционной системы
Прежде чем ответить на вопрос, что такое pid, важно понять функциональные возможности, от реализации которых зависят и функции идентификатора:
- работа с данными, запуск и остановка ПО;
- взаимодействие с устройствами ввода/вывода;
- распределение и организация оперативной памяти;
- обеспечение доступа к энергозависимым носителям;
- оптимизация ресурсов машины;
- обеспечение безопасного доступа каждого объекта к ресурсам машины;
- надежные вычисления;
- защита данных от вредоносного ПО и намеренного взлома.
Базовые понятия
Дальнейшее повествование будет базироваться на приведенных ниже понятиях. Пренебрегая этим пунктом, будет сложно понять, что такое pid.
Процесс – это любой объект, использующий ресурсы системы, согласно стандарту ISO. 9000:2000 – совокупность операций, взаимодействие которых преобразует входящие данные в исходящие.
Любой процесс характеризуется несколькими параметрами:
- машинным кодом;
- исполняемым кодом;
- зарезервированным фрагментом памяти (иногда – виртуальной);
- атрибутами безопасности;
- входными/выходными данными;
- стеком вызова, который следит за активностью каждого объекта;
- так называемой «кучей», хранящей промежуточные результаты операций и вычислений.
Процесс создается операционной системой с момента запуска или при получении соответствующего запроса. Завершение происходит путем сбора статистической информации с последующим удалением и взаимодействием с очередью планирования и выделением ресурсов. С теоретической базой покончено, пора дать ответ на важнейший вопрос, что такое pid.
Понятие идентификатора
Каждая запущенная программа идентифицируется или распознается с помощью уникального номера с меткой. Таким образом система взаимодействует с каждым процессом.
Чтобы поближе познакомиться с указателем, можно пойти двумя путями:
- Вызываем диспетчер задач правой кнопкой мыши на панели задач. Далее, переходим во вкладку «Процессы», выбираем меню «Вид». Находим пункт «Выбрать столбцы», в открывшемся диалоговом окне ставим галочку для PID. В командной строке прописываем tasklist.
- Для Unix-систем верна и другая тактика. Здесь рекомендуется использовать команду ps. С ее помощью можно найти идентификатор для конкретной программы.
Разрешается использование уникального номера для поиска потенциально вредоносного ПО. Дело в том, что вирусы часто маскируются под «благопристойные» файлы, указатель же дает четкое представление о безопасности рассматриваемого объекта. Нужно только уметь распознать, «что такое pid» из кодового потока системных и менее значительных процессов.
Современные языки программирования позволяют «вычленить» из обычного номера информацию об интересующем объекте. На программном уровне можно разработать код, напрямую взаимодействующий с pid. Что это дает? Ценой пары кликов удастся вывести полный путь к интересующему файлу или программе. По сути, это позволит не только понять и оптимизировать работу системы (количество необходимых ресурсов), но и защитить машину от потенциальной угрозы.
Чтобы не запутаться
В электронике существует и pid-регулятор – электронное устройство, использующееся в системах автоматического управления. Позволяет не только формировать сигнал управления, но и влиять на показатели точности и качества переходного процесса.
Многие пользователи путают два понятия, но они абсолютно разные. После прочтения статьи окончательно должен иссякнуть вопрос, «что такое pid процесса», так как приведенные сведения дают полное описание и возможности указателя. Важно понимать, что функционирование «операционки» напрямую зависит от каждого винтика фундаментальной системы. Сегодня был рассмотрена лишь частичка на микроуровне компьютера как машины.
Многие прошивки для квадрокоптеров, такие как Betaflight и KISS, позволяют пилотам настраивать значения PID для повышения эффективности полета. В этой статье я расскажу, что такое PID, как это влияет на стабильность и обработку полёта. Также расскажу о некоторых простых методах настройки PID квадрокоптера.
Что такое PID в квадрокоптерах
К сожалению, в этом мире не все идеально, поэтому были придуманы PID (далее по тексту ПИД), чтобы приблизиться к идеалам.
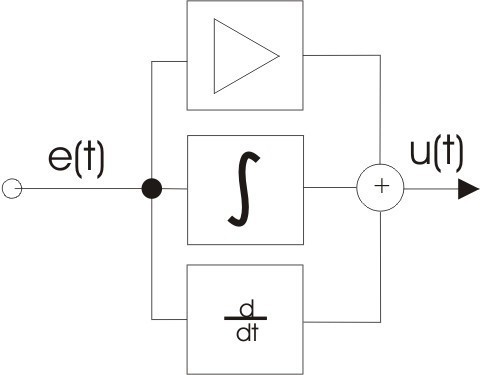
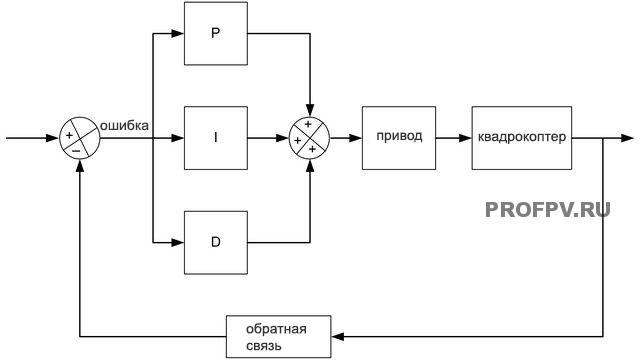
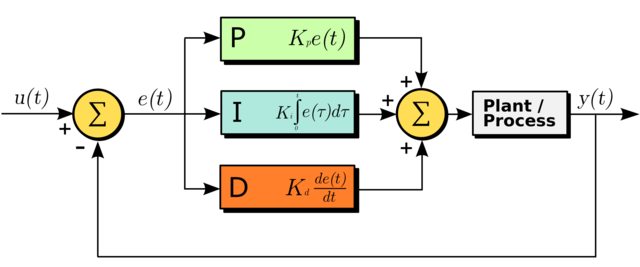
PID обозначает производную пропорционального интеграла. ПИД-регулятор представляет собой замкнутую систему управления, которая пытается получить фактический результат ближе к желаемому результату, внеся коррективы в выходные данные, которые отправляются двигателям. Если происходит ошибка, она возвращается в начало и цикл повторяется.
ПИД-регулятор вычисляет значение «ошибка» как разность между измеряемой величиной и желаемой величиной. Контроллер пытается свести к минимуму ошибку, отрегулировав поступающие значения управления.
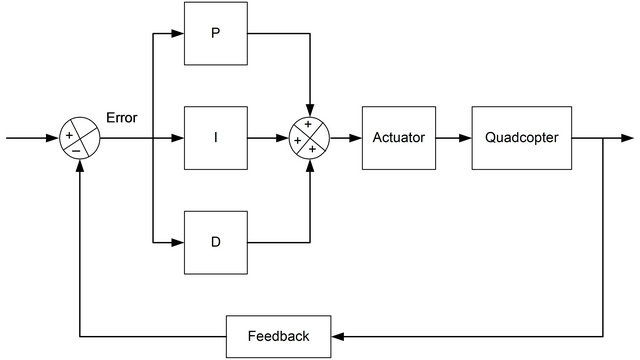
В ПИД-регуляторе есть три функции: P, I и D. Эти значения могут быть интерпретированы с точки зрения времени:
Чтобы был какой-либо контроль над квадрокоптером:
- Сначала нам нужно узнать угловую скорость дрона (как быстро квадрокоптер двигается по каждой оси).
- Зная, какая угловая скорость нам нужна, можно оценить отклонения.
- Теперь мы можем применить 3 алгоритма управления отклонением, чтобы внести корректировки на выходы двигателей (т.е. двигателям будут поступать немного другие команды в определенный момент).
Повторюсь, не обязательно полностью понимать как работает PID, чтобы нормально летать, однако, если вам интересна более глубокая теория, то далее будет интересное объяснение, постараюсь изложить все как можно в более легкой форме.
Как работают значения PID, их изменение
Как правило, изменение значений ПИД (усиления) оказывает влияние на поведение квадрокоптера:
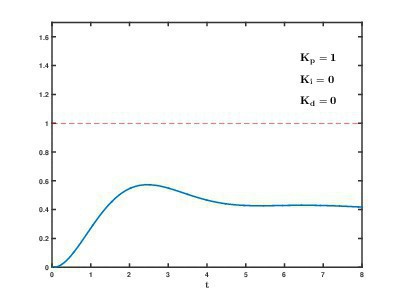
Усиление P
P определяет, насколько жестко контроллер полета исправляет погрешности, чтобы достичь желаемой траектории полета. Этот параметр регулирует чувствительность и отзывчивость на изменения положения стиков. Чем выше это число, тем выше чувствительность и отзывчивость.
Можно снизить P, чтобы уменьшить колебания, но тогда дрон будет нечетко выполнять ваши команды, поэтому нужно будет поиграть с I и D, чтобы это компенсировать.
Усиление I
Значение I определяет, насколько сильно он будет поддерживать квадрокоптер при воздействии внешних факторов, таких как ветер и смещение центра тяжести, например.
Это настройка жесткости при поворотах квадрокоптера.
Обычно, настройки по умолчанию вполне хорошо справляются с этим, но если вы заметили некоторый дрейф дрона без вашей команды, то увеличьте немного значение I. Если значение будет слишком низкое, вам часто придется исправлять траекторию полета дроном, особенно, если вы часто меняете уровень газа.
Таким образом, I используется для исправления таких мелких проблем.
Усиление D
Слишком большое значение тоже приводит к вибрациям. В попытке стабилизировать квадркоптер, полетный контроллер будет командовать регуляторам оборотов, чтобы те то прибавляли обороты двигателям, то уменьшали с такой скоростью (в смысле быстрее-медленнее), что из-за этого двигатели перегреются и сгорят. Вибрация также будет действовать на контроллер полета и со временем ситуация будет ухудшаться.
Нужно ли настраивать PID?
На сегодня программное обеспечение для квадрокоптеров имеет сложную фильтрацию шумов и оптимизированные алгоритмы для полетов. Квадрокоптер может хорошо летать прямо из коробки на основе стандартных значений PID, если, конечно вы не используете некачественные детали или квадрокоптер очень плохо настроен.
Настройка PID квадрокоптера
- Всегда настраивайте свой квадрокоптер в режиме АКРО (ACRO)!
- Убедитесь, что центр тяжести находится прямо посередине, так как центр тяжести оказывает значительное влияние на то, как хорошо будет летать ваш дрон.
Обычно я всегда начинаю летать на стандартных настройках, а настройки в прошивках Betaflight и KISS хорошо работают для большинства квадрокоптеров.
Когда я летаю и замечаю какое-нибудь нежелательное поведение, я настраиваю конкретное значение и снова проверяю в полете. Если у квадрокоптера много вибраций, можно поиграть со значением PID, предварительно уменьшив все значения до половины или более, чтобы убедиться, что они не слишком высоки для начала.
За один раз настраивайте одну ось, сначала крен, потом высоту и затем рыскание. На каждой оси я настраиваю одно значение за раз, начиная с коэффициента усиления P, затем усиления D и, наконец I. Также вам нужно будет постоянно возвращаться к тонкой настройке, потому что одно значение может влиять на другое.
Yaw (рыскание) и PID
PID могут помочь с улучшением рыскания дрона, но вы должны учитывать и многие другие факторы, которые могут привести к дестабилизация рыскания.
Одним из симптомов плохого рыскания: вы делаете быстрое рыскание и в этот момент даете резкий газ, а дрон по оси (yaw) рыскания не остается на этом же уровне.
Хорошая работа по этой оси также зависит от качества оборудования: двигателей, пропеллеров и регуляторов оборотов. Ими определяется, на сколько быстро дрон сможет перемещаться по оси рыскания (yaw).
Чтобы улучшить рыскание, вы можете попробовать следующее:
P на Roll (крен)
С хорошими настройками P квадрокоптер будет очень точно реагировать по крену на положение стика.
P на Pitch ( высотa)
Наберите высоту и опустите стик газа до конца вниз, после чего начните набирать газ, обратите внимание на набор высоты. Если квадрокоптер поднимается больше, чем нужно, то вероятно, что Р слишком мал, а если слишком быстрый набор, то Р нужно уменьшить.
Настраивайте до тех пор, пока дрон не станет отзывчивым и проворным с минимальной вибрацией. Также присматривайтесь к двигателям если они дергаются, то это означает, что Р завышен и следует его немного понизить.
TPA
D на Roll и Pitch (на крен и высоту)
Когда вы делаете трюки, такие как сальто и перевороты, вы наверняка замечали своеобразные отскоки в конце. Увеличение D может помочь в уменьшении этой проблемы. Будьте осторожны, так как большие значения D могут начать перегревать двигатели, поэтому регулируйте параметр с умом, ровно до того, чтобы проблемы исчезла, не больше. Также слишком большое значение D будет вызывать колебания и вибрацию в конце этих трюков.
I на Roll (на крен)
Наклоните (в полете, естественно) свой дрон вправо и влево и посмотрите, держит ли он этот наклон после того, как вы отпустили стик (напомню, все манипуляции в АКРО режиме), если он не держит угол наклона, то увеличьте значение I на Roll.
Сделайте тоже самое для наклона вперед и назад. Это также будет зависеть и от силы ветра.
Anti Gravity Gain
Летите по прямой и дайте пару раз (быстро) газа и посмотрите, сохраняет ли дрон положение. Если он опускается, то увеличьте это значение. Для меня идеальное значение было 3.
Yaw P (Рыскание Р)
Yaw PID необходимо настроить отдельно. Значения по умолчанию обычно хорошо работают на всех дронах.
Когда Р по рысканию слишком высок, то при рыскании квадрокоптер будет набирать высоту, в таком случае, Р следует уменьшить.
Yaw I (Рыскание I)
Как говорилось выше, I используется для предотвращения дрейфа, но чрезмерное рыскание по I может привести к нестабильности и фактически уменьшить отзывчивость. Yaw I никогда не должен быть выше, чем необходимое значение для предотвращения дрейфа. Если ничего не случилось, просто оставьте значение по умолчанию.
D-Term Set Point Weight
Если это значение слишком высокое, дрон будет менее отзывчивым и вести себя будет как робот, т.е. отвечать будет резко. Если значение будет низким, то отвечать на ваши действия будет более гладко и медленно. Я считаю, что хорошим значением будет 0,6.
Не все проблемы из-за плохих настроек PID
Перед настройкой PID, вы должны изучить и другие данные:
Вибрация
Не все колебания вызваны высоким значением P. Перед настройкой PID вам необходимо максимально устранить источники вибрации на вашем дроне. Например, балансировка двигателей и пропеллеров, жесткость рамы и т. д.
Центр тяжести (CG)
Центр тяжести должен быть ровно посередине, между всеми 4-мя двигателями. Плохая центровка приведет к тому, что одни двигатели будут работать больше, чем другие, отсюда перегрев моторов и плохая стабильность полета. Например, аккумулятор находится в задней части, вместо расположение по-середине и поэтому задние моторы будут работать на 100%, а передние на 80%. Вся масса на квадрокоптере должна быть отцентрована и расположена равномерно. По этой причине Х-образные рамы самые популярные.
Довольно бессмысленно использовать чужие ПИДы на своем квадрокоптере. Каждый дрон уникален, его оборудование, да даже ветер и климат влияют на корректировку PID.
Когда нужно перенастраивать PID?
Почти все компоненты квадрокоптера влияют на PID, поэтому когда вы меняете какой-нибудь компонент, проведите и настройку PID. Если в Betaflight и Cleanflight вы меняли Looptime, то тоже нужно будет подкорректировать PID.


Лев, некоторым (практически всем) интересны например подводные крылья, для их создания нужен PiD

Лев, автоматическая плавная регуляция практически любой фигни. ВНатуре, зачем нужно


сколько щелчков тумблера, столько раз придется заспавнить крафт для настройки ))

Egor, Есть Advanced PID, в нем можно менять настройки прямо во время пользования




Немного разные вещи
Просто показали принцип работы пида, не все знают что это такое
Филарет, по сути вообще не очень интересные тут посты в прицепе, не по теме. Енот посоветовал этот паблик, тк тут пишут про обновления, но в большинстве он бесполезен. Смотреть на какую-то фигню вообще 5% пользы.

Константин, пздц, это один из самых важных логических компонентов в игре, с помощью которого можно реализовать много чего, и ты ещё говоришь, что это бесполезная информация.
Читайте также: