
Драйвер в инверторе это
Обновлено: 04.07.2024
Хочу представить вам следующий этап развития частотного преобразователя.
Краткая предыстория: потребовалось мне как-то регулировать скорость вращения однофазного асинхронного двигателя (канального (вытяжного) вентилятора), для чего единственным адекватным решением является частотный преобразователь, и, не найдя подходящих вариантов, я начал заниматься разработкой его на платформе Arduino, что оказалось крайне увлекательно, полезно и не так просто, как казалось изначально. Однако через некоторое время результат все-таки был получен, пусть не совсем тот, который хотелось бы, но все же он работал, и поставленные задачи выполнял. Об этом подробно написано в моей предыдущей статье. Основным же недостатком моего частотника была форма напряжения на выходе (далека от синуса, больше похожа на параболу). И как раз в это время мне попадается информация о китайской микросхеме EG8010 (и плате собранной на ее базе EGS002) на базе которой и было решено собрать следующую версию частотного преобразователя.
Итак, основная задача все та же: получить на выходе переменное напряжение синусоидальной формы с возможностью регулирования его частоты и амплитуды. Модуль EGS002 является мостовым контроллером однофазного частотного преобразователя со всеми необходимыми защитами и обратной связью. На выходе такой преобразователь, в зависимости от конфигурации, может выдавать синусоиду от 0 до 400Гц, с постоянной, либо с изменяющейся пропорционально частоте амплитудой. Несущая частота нарезки синуса составляет 23кГц. Также он умеет работать в униполярном и биполярном режиме (второй не используем, поэтому не будем про него). Помимо этого есть возможность подключения дисплея, вентилятора, внешнего термодатчика (для управления вентилятором) и даже подключения через порт RS2323. Для питания модулю требуется +5в для процессора и логики драйверов ключей (IR2113) и +12в (+15в) для управления затворами этих самых ключей. Ну и, само собой, напряжение, из которого формируется синусоида (от 12в до 400в), в моем случае +340в.
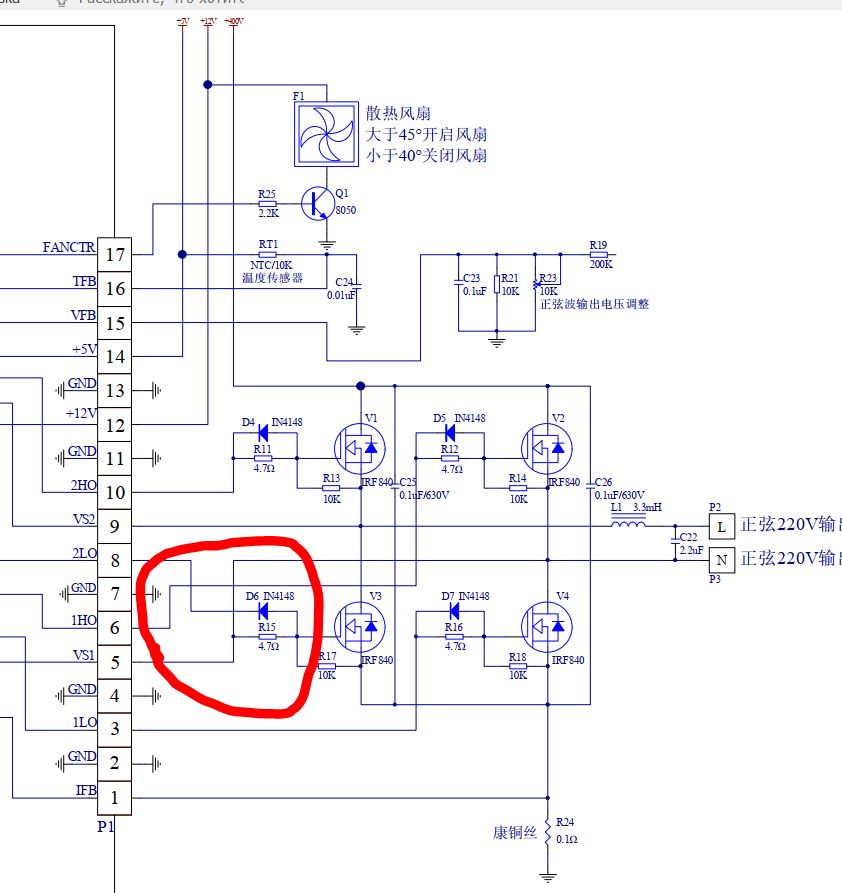
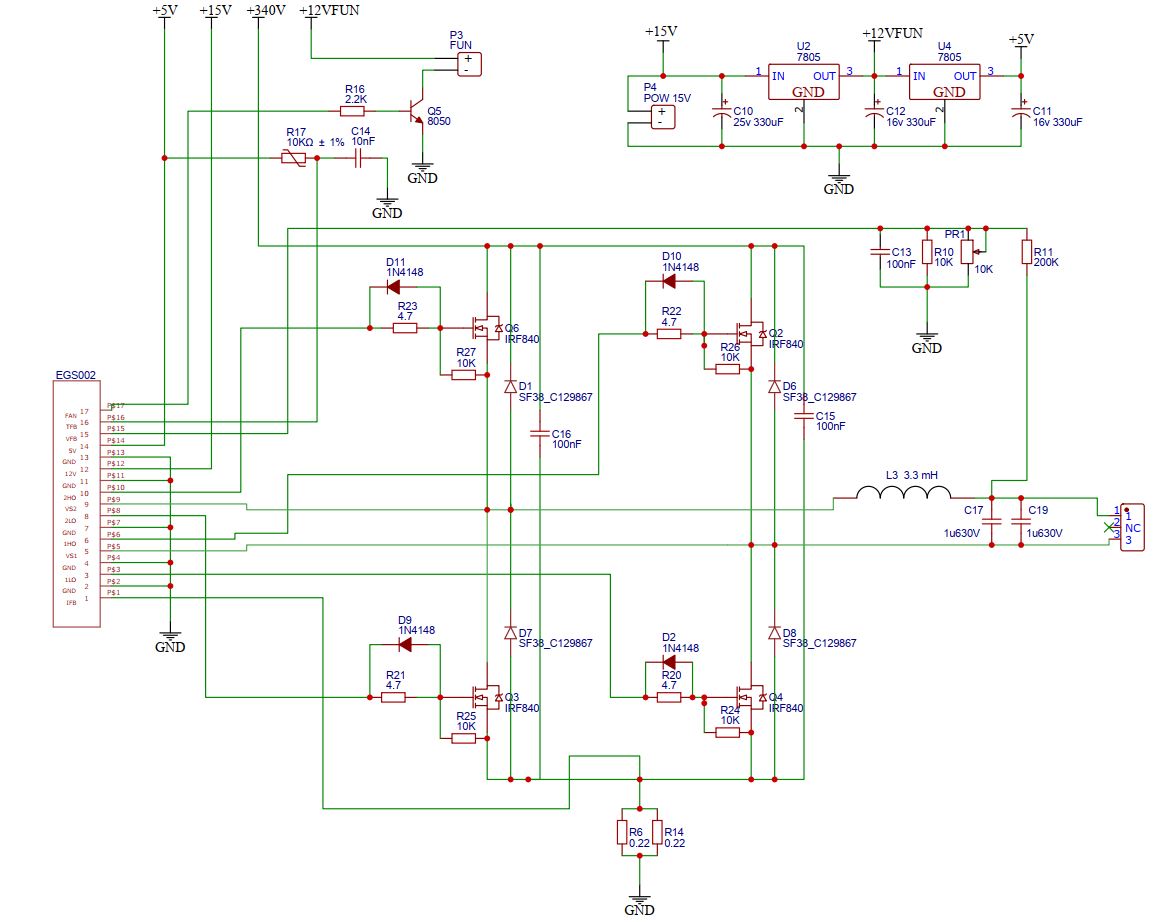
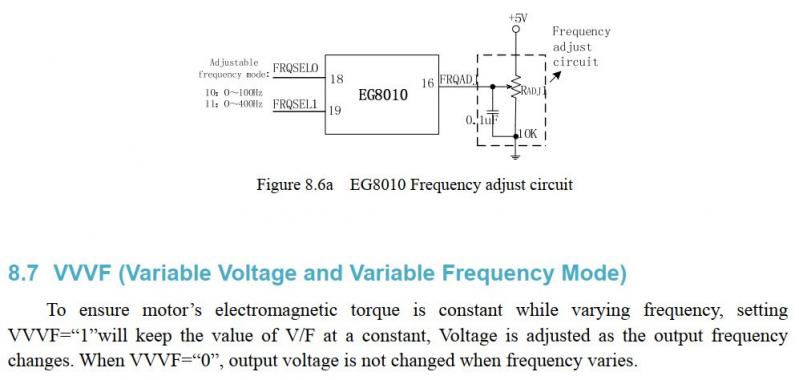
В документации на плату есть ошибки в самой первой схеме, как в английском, так и в русском варианте, будьте внимательны:
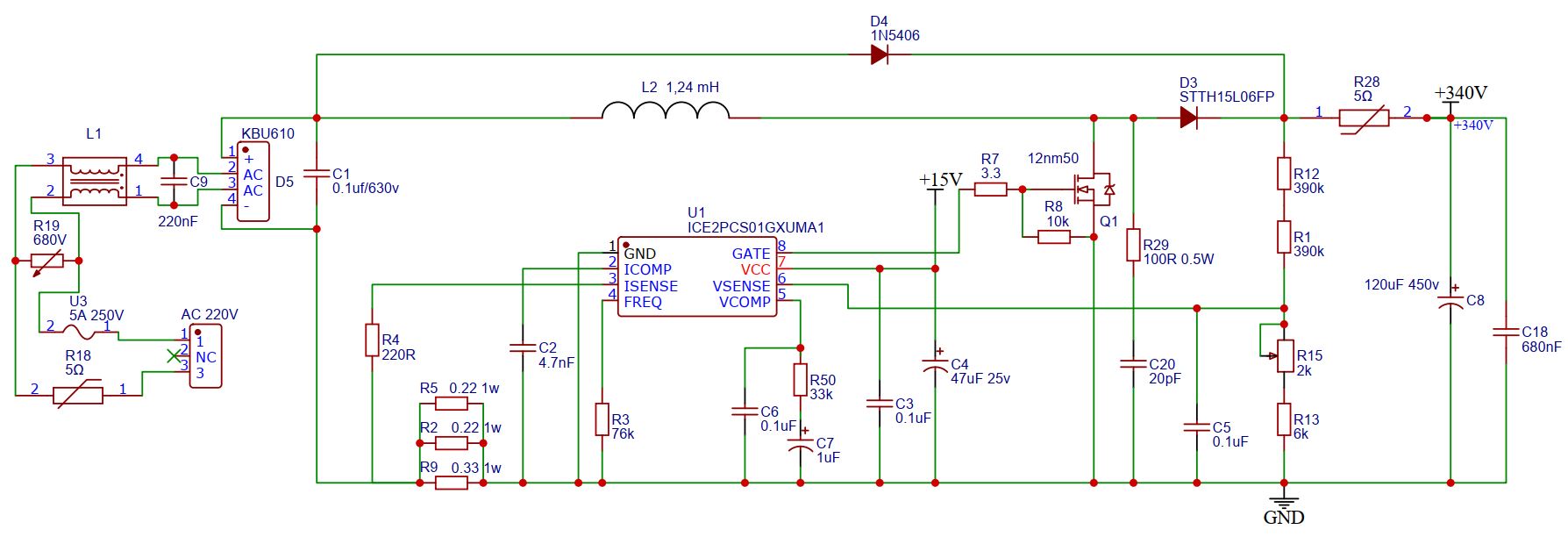
Изначально я пробовал подавать в качестве высокого напряжения выпрямленное сетевое. И первый тестовый вариант платы как раз был просто с входным фильтром и диодным выпрямителем. Однако, как выяснилось в ходе экспериментов, напряжения этого недостаточно (в зависимости от напряжения сети +300в, максимум +310в), на выходе инвертора удавалось получить максимум 180-190 вольт, что не позволяло запустить вентилятор на максимальных оборотах, да и к тому же при низком напряжении не работает понижение напряжения при снижении частоты, что недопустимо для асинхронного двигателя.
Схема модуля PFC:
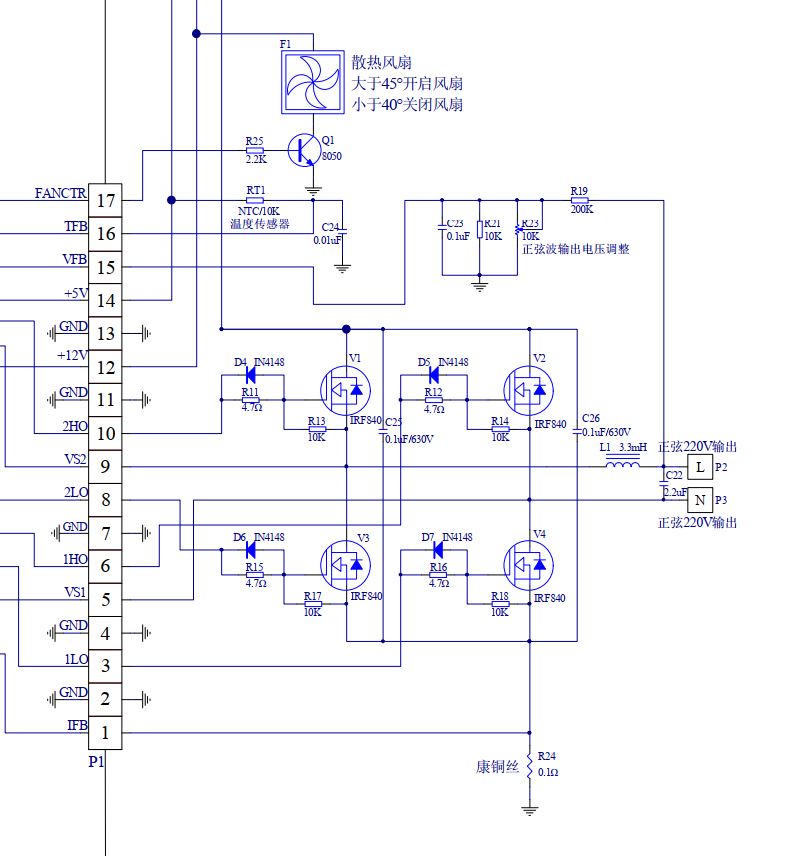
Далее про силовую часть, собственно инвертор. Схема так же взята из даташита на EG8010, тут рассказывать особо нечего, единственным отличием являются диоды (D1,D6,D7,D8), они шунтируют внутренний медленный диод транзисторов, защищая последний от высоковольтных выбросов обмоток подключаемого двигателя, для этого подойдут диоды SF38, HER38 и подобные им. Силовые транзисторы в даташите указаны IRF840, но я использовал 9N90 в изолированном корпусе, считаю что менее чем на 900в брать нежелательно. Выходной дроссель, как советуют многие, использовавшие данную плату, лучше всего мотать на кольцах марки МП-140, я использовал пару колец размером 24х13х7мм полукруглой формы, получив тем самым сердечник с размерами 24х13х14мм соответственно,. Индуктивность для этого дросселя по даташиту - 3,3 мГн, однако в моем случае при такой индуктивности дроссель сильно нагревался, и наилучшие результаты получились при индуктивности порядка 6 - 7 мГн, мотался проводом 0,4 мм * 2 жилы, расчетная длина провода около 6,5 м.
Схема силовой части:
Питание. Я не стал изобретать велосипед, а просто оставил место на плате под отдельный AC-DC преобразователь размерами до 60мм*28мм, благо у тех же китайцев на али их навалом, на любой вкус (в моем случае на преобразователе убраны диодный мост и высоковольтный электролит, т.к. на него итак приходит уже выпрямленное сетевое напряжение). Лучше всего использовать источник с выходным напряжением 15в (для уверенного открытия силовых ключей), это напряжение подается на драйверы IR2113 (расположены на модуле EGS002), а также им питается контроллер PFC (ICE2PCS01G), далее напряжение сначала понижается преобразователем LM7812 до 12в для питания вентилятора, а после LM7805 до 5 вольт соответственно, которые уже идут на питание самой EG8010 и на питание логики драйверов.
Немного про доработку платы EGS002. Как я уже писал, у нее несколько вариантов работы, по умолчанию плата сконфигурирована для использования в инверторе и перемычки запаяны таким образом, что на выходе должно получиться ровно 50Гц, однако, нам это не подходит.

В данном случае нужен режим VVVF (Variable Voltage and Variable Frequency Mode), режим с переменной частотой и переменным напряжением в диапазоне частоты от 0 до 100 Гц.
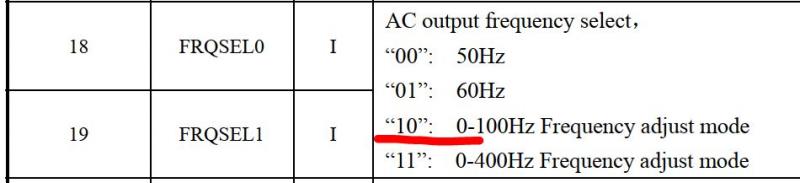

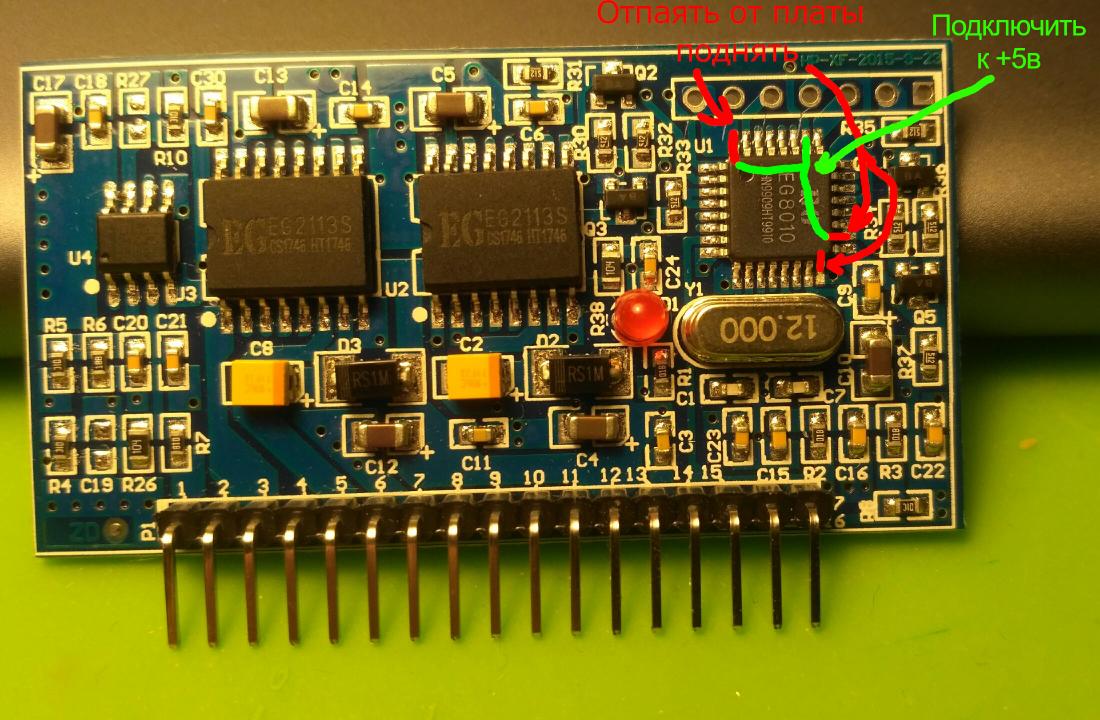
Для этого нужно чтобы на ножке 18 был высокий уровень, 19 – низкий а так же высокий на 32 ножке, для разрешения изменения напряжения при изменении частоты. С 19 ногой делать ничего не нужно она и так сидит на земле, а вот 18 и 32 нужно аккуратно отпаять от платы, поднять, чтоб они не касались контактных площадок и подтянуть их к +5в, мне кажется, проще всего это сделать, подключив их к пину питания VCC (26 нога), должно получиться как то так:
Помимо этого необходимо 16 ногу также отпаять, поднять от платы и сделать от нее отвод, туда будет подключаться потенциометр для регулировки частоты. Остальные перемычки можно не трогать и оставить по умолчанию, они отвечают за настройки и плавного пуска и дедтайма. Перемычка JP9 включает подсветку дисплея, запаивается по желанию, я подключил туда кнопку без фиксации.
Регулировка частоты осуществляется через изменение напряжения на 16 пине (FRQADJ) с помощью потенциометра на 10 кОм, крайние контакты которого подключаются к +5в и земле, а к бегунку как раз и подключается 16 нога и конденсатор на землю для компенсации помех. Однако у такой схемы подключения есть нюансы, частота регулируется в диапазоне от 0 до 100 Гц, что для поставленной цели избыточно.
Напомню, вместе с частотой изменяется и амплитуда (действующее значение напряжения), изначально при первом запуске устанавливается значение частоты равное 50 герцам и с помощью потенциометра PR1 настраивается напряжение в 220-230 вольт на выходе. Теперь и далее при регулировке частоты соотношение напряжение/частота останется постоянным, следовательно, при повышении частоты, будет повышаться и напряжение, но, при питании +340в максимально, что можно получить, это примерно 230в переменного напряжения на выходе, т.е. частота повышаться будет, но напряжение останется тем же. На практике это выглядит так: двигатель набирает обороты до 50 герц, а при дальнейшем повышении частоты скорость вращения начинает снижаться, двигателю не хватает напряжения, ротор начинает сильней отставать от скорости вращения магнитного потока, в таких случаях говорят: увеличивается скольжение двигателя, падает крутящий момент, возрастают потери на нагрев, в общем, для двигателя это не хорошо. Похожая ситуация наблюдается и при чрезмерном снижении частоты. Чтобы избежать этих проблем необходимо ограничить диапазон регулировки напряжения на 16 пине и, соответственно, частоты. Сделать это можно добавив по резистору последовательно с потенциометром с обеих сторон:
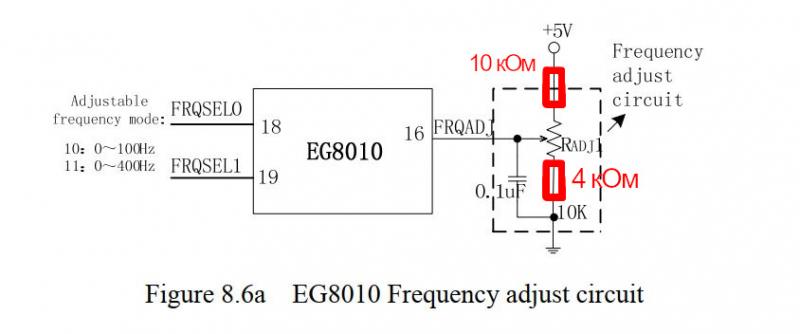
При тестах оптимальным оказался такой вариант: со стороны +5в резистор 10 кОм, со стороны земли 4 кОм. В итоге эта манипуляция дает ограничение регулировки частоты от 17 Гц до 58 Гц, ну и бонусом более плавная регулировка. Элементы припаяны навесным монтажом прямо на выводы потенциометра. Потенциометр на 10 кОм многооборотный.
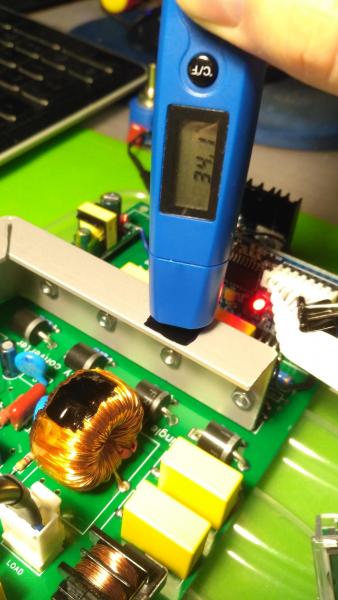
Далее технические моменты и испытания. При первоначальных тестах нагрева почти не было, ни на силовых ключах, ни на ключе и диоде PFC. Поэтому с радиатором особо мудрить не стал, взял алюминиевый уголок 20мм*10мм*2мм и из него сделал один общий радиатор. Изолировать от него ничего не пришлось, т.к. все транзисторы и диод в изолированных корпусах. Единственное что греется в этой схеме - это выходной дроссель, и то максимум до 48 градусов после часа работы при температуре окружающего воздуха +26. Поэтому для охлаждения достаточно отверстий в корпусе. Однако разъем для подключения вентилятора имеется, ровно как и место в корпусе сверху (небольшой вентилятор толщиной 10 мм влезет точно). Включается обдув примерно при 40 градусах (датчиком температуры является NTC термистор 10 кОм R17).


Немного о сборке и включении, если кто вдруг соберется повторить. Рекомендую сначала не запаивать модуль EGS002, включить в сеть и подстроечным резистором R15 выставить напряжение на выходе PFC в 340 вольт, далее, уже запаяв модуль и установив на нем частоту в 50Гц, подстроечным резистором PR1 установить напряжение на выходе в 220-230 вольт.
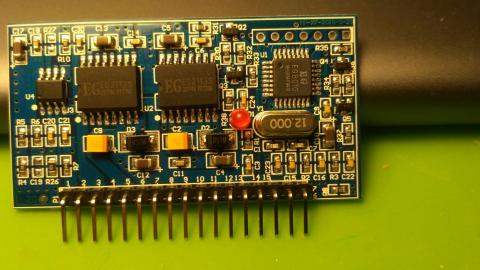
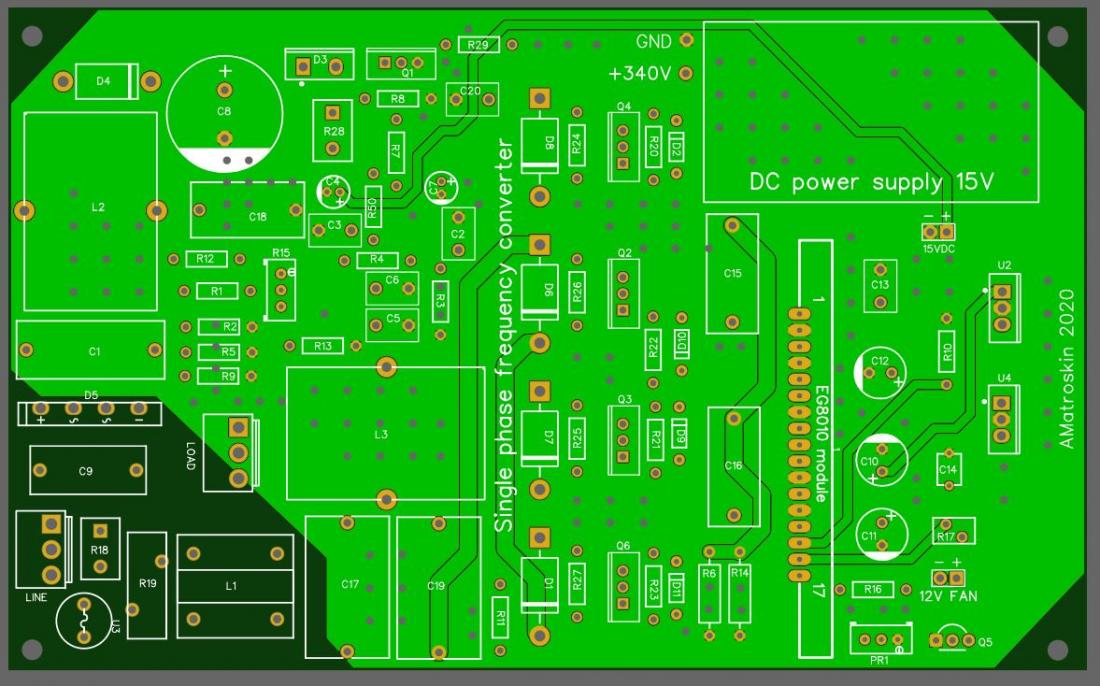
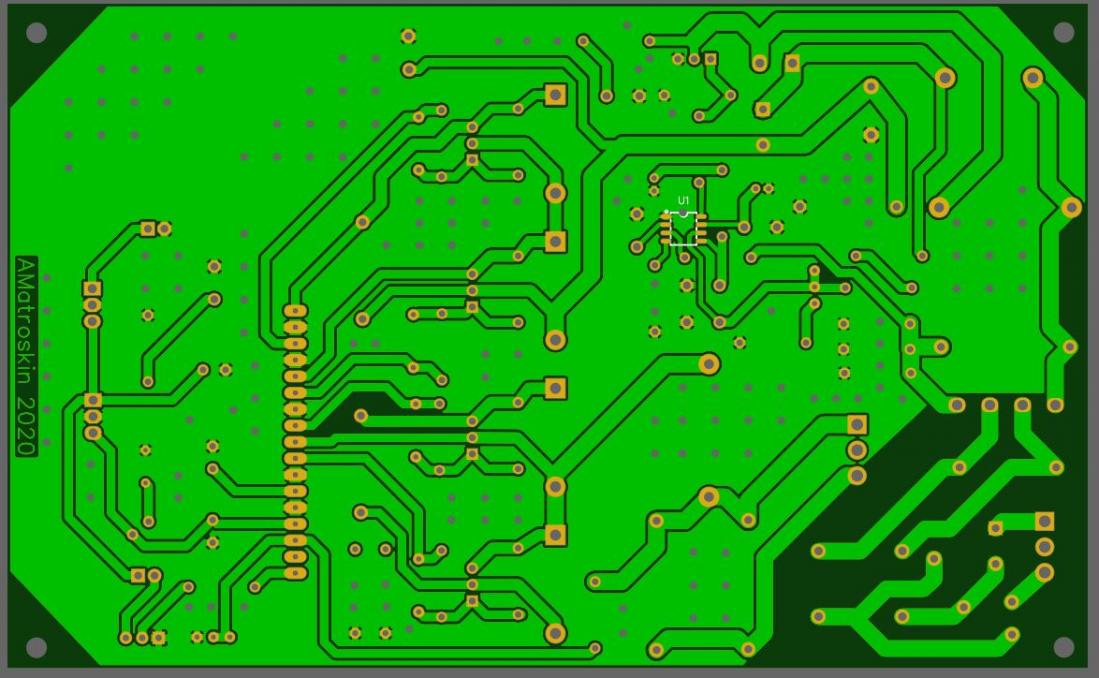
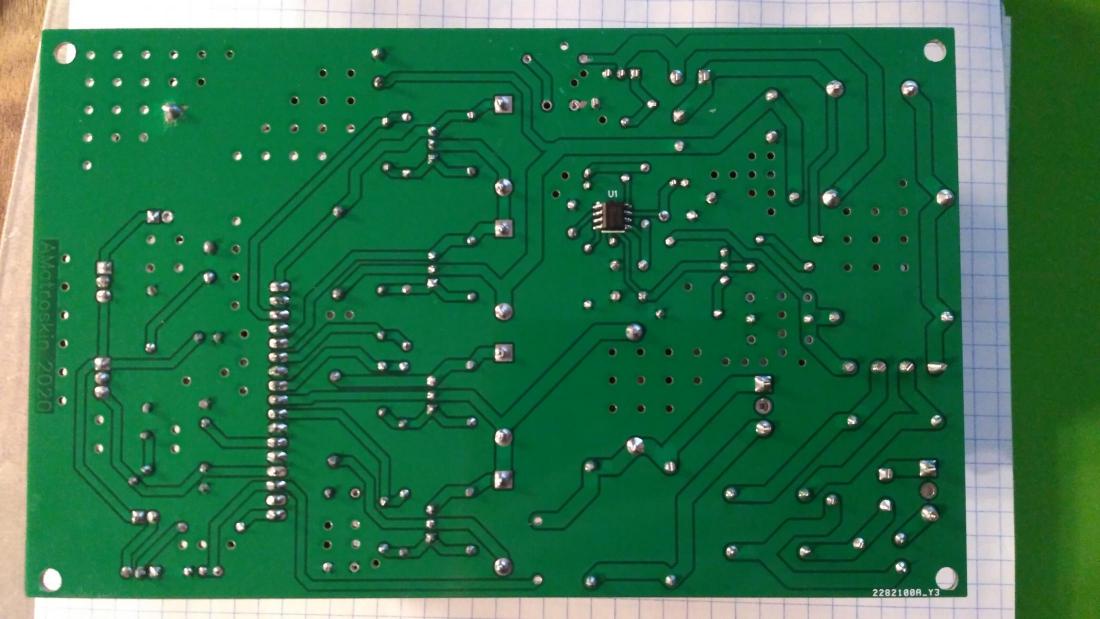
Вся конструкция изначально проектировалась под корпус Gainta G1037B размерами 189мм*113мм*66.6мм, плата размерами 168мм*103мм, двухслойная, заказывалась в Китае, (фоторезистом делал только тестовый вариант) все компоненты размещены на одной стороне, за исключением контроллера PFC, он был только в корпусе SOIC-8 поэтому остался на противоположной стороне. Плата на картинках немного отличается от готовой, т.к. после там были поправлены некоторые моменты.
Плата (картинка) и фото в сборе:


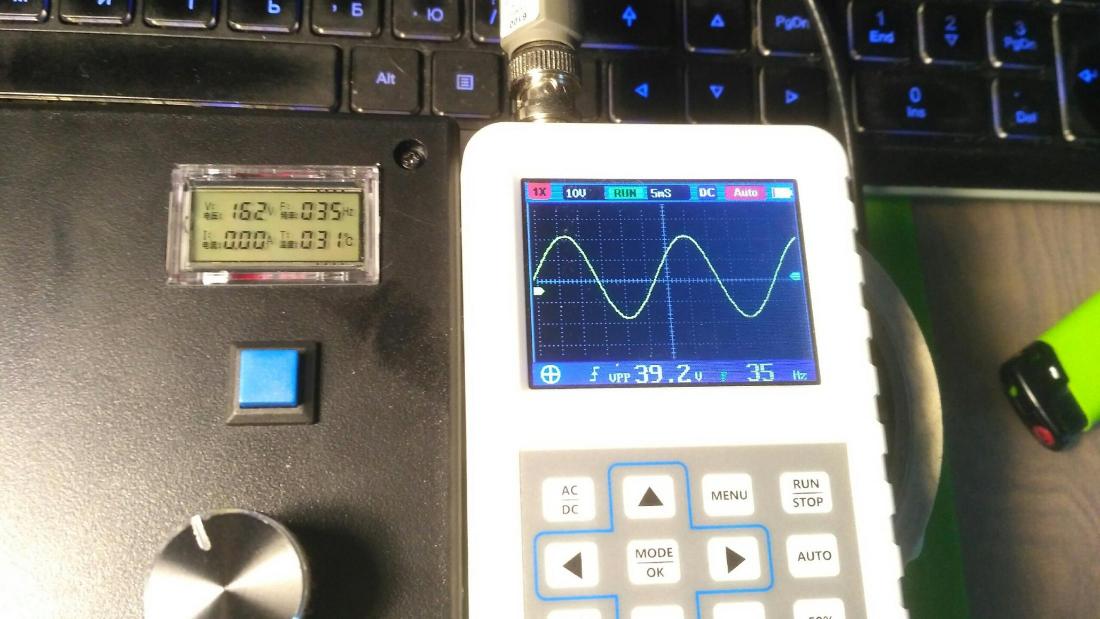
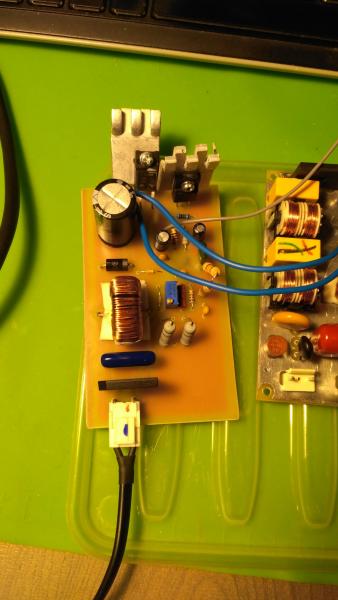
И чуть процесса отладки и первых тестов)
На этом все, всем спасибо за внимание. Жду вопросы, замечания, конструктивную критику.

Во-первых, в данном переводе могут быть серьёзные проблемы с переводом терминов, я не занимался электротехникой и схемотехникой достаточно, но всё же что-то знаю; также я пытался перевести всё максимально понятно, поэтому не использовал такие понятия, как бутсрепный, МОП-транзистор и т.п. Во-вторых, если орфографически сейчас уже сложно сделать ошибку (хвала текстовым процессорам с указанием ошибок), то ошибку в пунктуации сделать довольно-таки просто.
И вот по этим двум пунктам прошу пинать меня в комментариях как можно сильнее.
Теперь поговорим уже больше о теме статьи — при всём многообразии статей о построении различных транспортных средств наземного вида (машинок) на МК, на Arduino, на <вставить название>, само проектирование схемы, а тем более схемы подключения двигателя не описывается достаточно подробно. Обычно это выглядит так:
— берём двигатель
— берём компоненты
— подсоединяем компоненты и двигатель
— …
— PROFIT!1!
Но для построения более сложных схем, чем для простого кручения моторчика с ШИМ в одну сторону через L239x, обычно требуется знание о полных мостах (или H-мостах), о полевых транзисторах (или MOSFET), ну и о драйверах для них. Если ничто не ограничивает, то можно использовать для полного моста p-канальные и n-канальные транзисторы, но если двигатель достаточно мощный, то p-канальные транзисторы придётся сначала обвешивать большим количеством радиаторов, потом добавлять кулеры, ну а если совсем их жалко выкидывать, то можно попробовать и другие виды охлаждения, либо просто использовать в схеме лишь n-канальные транзисторы. Но с n-канальными транзисторами есть небольшая проблема — открыть их «по-хорошему» подчас бывает довольно сложно.
Поэтому я искал что-нибудь, что мне поможет с составлением правильной схемы, и я нашёл статью в блоге одного молодого человека, которого зовут Syed Tahmid Mahbub. Этой статьёй я и решил поделится.
Во многих ситуациях мы должны использовать полевые транзисторы как ключи верхнего уровня. Также во многих ситуациях мы должны использовать полевые транзисторы как ключи как и верхнего, так и нижнего уровней. Например, в мостовых схемах. В неполных мостовых схемах у нас есть 1 MOSFET верхнего уровня и 1 MOSFET нижнего уровня. В полных мостовых схемах мы имеем 2 MOSFETа верхнего уровня и 2 MOSFETа нижнего уровня. В таких ситуациях нам понадобится использовать драйвера как высокого, так и низкого уровней вместе. Наиболее распространённым способом управления полевыми транзисторами в таких случаях является использование драйвера ключей нижнего и верхнего уровней для MOSFET. Несомненно, самым популярным микросхемой-драйвером является IR2110. И в этой статье/учебнике я буду говорить о именно о нём.
Давайте для начала взглянем на блок-схему, а также описание и расположение контактов:

Рисунок 1 — Функциональная блок-схема IR2110

Рисунок 2 — Распиновка IR2110

Рисунок 3 — Описание пинов IR2110
Также стоит упомянуть, что IR2110 выпускается в двух корпусах — в виде 14-контактного PDIP для выводного монтажа и 16-контактного SOIC для поверхностного монтажа.
Теперь поговорим о различных контактах.
VCC — это питание нижнего уровня, должно быть между 10В и 20В. VDD — это логическое питание для IR2110, оно должно быть между +3В и +20В (по отношению к VSS). Фактическое напряжение, которое вы выберете для использования, зависит от уровня напряжения входных сигналов. Вот график:

Рисунок 4 — Зависимость логической 1 от питания
Обычно используется VDD равное +5В. При VDD = +5В, входной порог логической 1 немного выше, чем 3В. Таким образом, когда напряжение VDD = +5В, IR2110 может быть использован для управления нагрузкой, когда вход «1» выше, чем 3 (сколько-то) вольт. Это означает, что IR2110 может быть использован почти для всех схем, так как большинство схем, как правило, имеют питание примерно 5В. Когда вы используете микроконтроллеры, выходное напряжение будет выше, чем 4В (ведь микроконтроллер довольно часто имеет VDD = +5В). Когда используется SG3525 или TL494 или другой ШИМ-контроллер, то, вероятно, придётся их запитывать напряжением большим, чем 10В, значит на выходах будет больше, чем 8В, при логической единице. Таким образом, IR2110 может быть использован практически везде.
Вы также можете снизить VDD примерно до +4В, если используете микроконтроллер или любой чип, который даёт на выходе 3.3В (например, dsPIC33). При проектировании схем с IR2110, я заметил, что иногда схема не работает должным образом, когда VDD у IR2110 был выбран менее + 4В. Поэтому я не рекомендую использовать VDD ниже +4В. В большинстве моих схем уровни сигнала не имеют напряжение меньше, чем 4В как «1», и поэтому я использую VDD = +5V.
Если по каким-либо причинам в схеме уровень сигнала логической «1» имеет напряжение меньшее, чем 3В, то вам нужно использовать преобразователь уровней/транслятор уровней, он будет поднимать напряжение до приемлемых пределов. В таких ситуациях я рекомендую повышение до 4В или 5В и использование у IR2110 VDD = +5В.
Теперь давайте поговорим о VSS и COM. VSS это земля для логики. COM это «возврат низкого уровня» — в основном, заземление низкого уровня драйвера. Это может выглядеть так, что они являются независимыми, и можно подумать что, пожалуй, было бы возможно изолировать выходы драйвера и сигнальную логику драйвера. Тем не менее, это было бы неправильно. Несмотря на то что внутренне они не связаны, IR2110 является неизолированным драйвером, и это означает, что VSS и COM должны быть оба подключены к земле.
HIN и LIN это логические входы. Высокий сигнал на HIN означает, что мы хотим управлять верхним ключом, то есть на HO осуществляется вывод высокого уровня. Низкий сигнал на HIN означает, что мы хотим отключить MOSFET верхнего уровня, то есть на HO осуществляется вывод низкого уровня. Выход в HO, высокий или низкий, считается не по отношению к земле, а по отношению к VS. Мы скоро увидим, как усилительные схемы (диод + конденсатор), используя VCC, VB и VS, обеспечивают плавающее питания для управления MOSFETом. VS это плавающий возврат питания. При высоком уровне, уровень на HO равен уровню на VB, по отношению к VS. При низком уровне, уровень на HO равнен VS, по отношению к VS, фактически нулю.
Высокий сигнал LIN означает, что мы хотим управлять нижним ключом, то есть на LO осуществляется вывод высокого уровня. Низкий сигнал LIN означает, что мы хотим отключить MOSFET нижнего уровня, то есть на LO осуществляется вывод низкого уровня. Выход в LO считается относительно земли. Когда сигнал высокий, уровень в LO такой же как и в VCC, относительно VSS, фактически земля. Когда сигнал низкий, уровень в LO такой же как и в VSS, относительно VSS, фактически нуль.
SD используется в качестве контроля останова. Когда уровень низкий, IR2110 включен — функция останова отключена. Когда этот вывод является высоким, выходы выключены, отключая управление IR2110.
Теперь давайте взглянем на частые конфигурации с IR2110 для управления MOSFETами как верхних и нижних ключей — на полумостовые схемы.

Рисунок 5 — Базовая схема на IR2110 для управления полумостом
D1, C1 и C2 совместно с IR2110 формируют усилительную цепь. Когда LIN = 1 и Q2 включен, то C1 и С2 заряжаются до уровня VB, так как один диод расположен ниже +VCC. Когда LIN = 0 и HIN = 1, заряд на C1 и С2 используется для добавления дополнительного напряжения, VB в данном случае, выше уровня источника Q1 для управления Q1 в конфигурации верхнего ключа. Достаточно большая ёмкость должна быть выбрана у C1 для того чтобы её хватило для обеспечения необходимого заряда для Q1, чтобы Q1 был включён всё это время. C1 также не должен иметь слишком большую ёмкость, так как процесс заряда будет проходить долго и уровень напряжения не будет увеличиваться в достаточной степени чтобы сохранить MOSFET включённым. Чем большее время требуется во включённом состоянии, тем большая требуется ёмкость. Таким образом меньшая частота требует большую ёмкость C1. Больший коэффициент заполнения требует большую ёмкость C1. Конечно есть формулы для расчёта ёмкости, но для этого нужно знать множество параметров, а некоторые из них мы может не знать, например ток утечки конденсатора. Поэтому я просто оценил примерную ёмкость. Для низких частот, таких как 50Гц, я использую ёмкость от 47мкФ до 68мкФ. Для высоких частот, таких как 30-50кГц, я использую ёмкость от 4.7мкФ до 22мкФ. Так как мы используем электролитический конденсатор, то керамический конденсатор должен быть использован параллельно с этим конденсатором. Керамический конденсатор не обязателен, если усилительный конденсатор — танталовый.
D2 и D3 разряжают затвор MOSFETов быстро, минуя затворные резисторы и уменьшая время отключения. R1 и R2 это токоограничивающие затворные резисторы.
+MOSV может быть максимум 500В.
+VCC должен идти с источника без помех. Вы должны установить фильтрующие и развязочные конденсаторы от +VCC к земле для фильтрации.
Давайте теперь рассмотрим несколько примеров схем с IR2110.

Рисунок 6 — Схема с IR2110 для высоковольтного полумоста

Рисунок 7 — Схема с IR2110 для высоковольтного полного моста с независимым управлением ключами (кликабельно)
На рисунке 7 мы видим IR2110, использованный для управления полным мостом. В ней нет ничего сложного и, я думаю, уже сейчас вы это понимаете. Также тут можно применить достаточно популярное упрощение: HIN1 мы соединяем с LIN2, а HIN2 мы соединяем с LIN1, тем самым мы получаем управление всеми 4 ключами используя всего 2 входных сигнала, вместо 4, это показано на рисунке 8.

Рисунок 8 — Схема с IR2110 для высоковольтного полного моста с управлением ключами двумя входами (кликабельно)

Рисунок 9 — Схема с IR2110 как высоковольтного драйвера верхнего уровня
На рисунке 9 мы видим IR2110 использованный как драйвер верхнего уровня. Схема достаточно проста и имеет такую же функциональность как было описано выше. Есть вещь которую нужно учесть — так как мы больше не имеем ключа нижнего уровня, то должна быть нагрузка подключённая с OUT на землю. Иначе усилительный конденсатор не сможет зарядится.

Рисунок 10 — Схема с IR2110 как драйвера нижнего уровня

Рисунок 11 — Схема с IR2110 как двойного драйвера нижнего уровня
Я видел как на многих форумах, люди бьются с проектированием схем на IR2110. У меня тоже было много трудностей прежде чем я cмог уверенно и последовательно строить успешные схемы драйвера на IR2110. Я попытался объяснить применение и использование IR2110 довольно тщательно, попутно всё объясняя и используя большое количество примеров, и я надеюсь, что это поможет вам в ваших начинаниях с IR2110.
Что такое силовая электроника? Без сомнения — это целый мир! Современный и полный комфорта. Многие представляют себе силовую электронику как что-то «магическое» и далекое, но посмотрите вокруг — почти все, что нас окружает содержит в себе силовой преобразователь: блок питания для ноутбука, светодиодная лампа, UPS, различные регуляторы, стабилизаторы напряжения, частотники (ПЧ) в вентиляции или лифте и многое другое. Большинство из этого оборудования делает нашу жизнь комфортной и безопасной.
Разработка силовой электроники по ряду причин является одной из сложнейших областей электроники — цена ошибки тут очень высока, при этом разработка силовых преобразователей всегда привлекала любителей, DIYщиков и не только. Наверняка вам хотелось собрать мощный блок питания для какого-то своего проекта? Или может быть online UPS на пару кВт и не разориться? А может частотник в мастерскую?
Сегодня я расскажу о своем небольшом открытом проекте, а точнее о его части, который позволит шагнуть в мир разработки силовой электроники любому желающему и при этом остаться в живых. В качестве демонстрации возможностей я покажу как за 15 минут собрать инвертор напряжения из 12В DC в 230В AC с синусом на выходе. Заинтриговал? Поехали!

Причины появления проекта
В последние пару лет разработка силовых преобразователей составляет около 90% моих заказов, основные трудозатраты уходят в основном на разработку ПО и макетирование, проектирование схемотехники + финальная трассировка платы от общих затрат составляет обычно не более 10-15%. Тут приходит понимание, что процесс макетирования, в который входит разработка ПО, необходимо как-то сократить и оптимизировать.
Выхода как всегда есть минимум два: купить готовую отладку, например, у Texas Instrumets или Infineon, но они обычно заточены под конкретную задачу и стоят от 500 до 5000$, при этом нет гарантии, что будет похожий заказ и данное вложение с высокой вероятностью просто не окупится.
Второй вариант — делать самому, но делать основательно это почти тоже самое, что запустить "+1 ревизию железа", что выльется в дополнительные траты для заказчика. Если делать не основательно, то как обычно все будет на соплях и где-нибудь что-то отвалится и пока макет, комплектующие и сроки.
Спустя какое-то время, я обратили внимание на очевиднейшее решение. Оно настолько простое и очевидное, что долго удивлялся почему такого еще не сделал тот же TI или Infineon. Сейчас расскажу о своем «просветление».
Давайте рассмотрим несколько наиболее популярных топологий силовых преобразователей:





- Все топологии включают в себя основные компоненты — конденсаторы, транзисторы и индуктивность (дроссель или трансформатор). Это 3 кита силовой электроники;
- Транзисторы включены везде одинаково и образуют так называемый «полумост». Из него построены почти все топологии преобразователей;
- Вариант включения связки «полумост + конденсатор» не меняется на всех топологиях. Меняется тип индуктивности и варианты включения полумостов.

Из этого можно сделать вывод, что имея некий стандартный модуль в виде связки «полумост + конденсатор» можно построить любой преобразователь, добавляя лишь нужный дроссель или трансформатор. Поэтому очевидным решения для упрощения прототипирования было создание вот такого модуля:
Борьба добра со злом
К сожалению ограниченное количество часов в сутках и банальная лень диктуют свои условия. К необходимости изготовить данный модуль я пришел еще год назад, но реализация постоянно переносилась под лозунгом — «на следующих выходных точно сделаю!».
Наверно идея так бы и осталась лежать на полке, если бы не 2 события. Во-первых, ко мне пришли в один месяц 2 заказчика и каждый хотел сложный и интересный в реализации преобразователь, а главное готовы были очень хорошо заплатить. Хотя учитывая, что он из Европы, то может для них этого и дешево еще оказалось)) Оба проекта для меня были интересны, например, один из них «трехфазный стабилизатор напряжения с гальванической развязкой (sic!)», то есть 3-х фазный PFC + 3 мостовых преобразователя (phase shifted) + синхронный выпрямитель + 3-х фазный инвертор. Все это на SiC и очень компактное. В общем я взялся за 2 больших заказа, каждый из них по
800 человеко-часов и срок 6 месяцев. В итоге меня «заставили» искать пути оптимизации.
Во-вторых, мне неожиданно написали ребята из компании PCBway, многие наверняка у них платы заказывали, и предложили по сотрудничать. Они очень активно поддерживают открытые железячные проекты, то есть ту самую инициативу CERN — Open Source Hardware. Сотрудничество простое, понятное для обеих сторон — они снабжают меня бесплатно платами для моих проектов, а я их открываю, ну и выкладываю на их сайте, в других местах уже по желанию. Для меня это стало дополнительной мотивацией, а главное совесть моя чиста, т.к. я уже несколько лет заказываю у них платы и на прототипы, и для серийного производства при этом рассказываю о них знакомым и партнерам. Теперь мне за это еще и плюшка в виде бесплатных плат для мелких проектов, можно чаще писать на хабр))
И тут лед тронулся, было решено создать не просто описанный ранее модуль, а целый комплект разработчика силовой электроники и сделать его открытым и доступным каждому.
Структура проекта
В начале статьи я упомянул, что расскажу сегодня лишь про одну часть — это силовой модуль полумоста. Он один уже позволяет создать преобразователь, просто прикрутив управляющую схему, например, отладку STM32-Discovery, Arduino, TMS320, TL494 или чем вы там владеете. Привязка к какой либо платформе или МК нет вообще.
Только это не весь проект, а часть)) Из чего состоит готовый силовой преобразователь? В первую очередь силовая часть, чтобы она заработала нужен некий модуль управления, чтобы понять что происходит нужна индикация, а чтобы понять что происходит с безопасного расстояния еще и интерфейс, например, Modbus RTU или CAN.
В итоге общая структура проекта выглядит так:

Вероятно в будущем еще напишу программку для расчета трансформаторов и дросселей, как обычных, так и планарных. Пока что так. Разные части диаграммы в черновом варианте уже реализована и обкатаны в двух проектах, после небольших доработок по ним так же будут написаны статьи и доступны исходники.
Силовой модуль полумоста
Теперь пришло время подробнее посмотреть на сегодняшнего героя. Модуль универсален и позволяет работать с транзисторами Mosfet и IGBT, как низковольтными, так и высоковольтными ключами до 1200В.
- Гальваническая развязка управляющей (цифровой) стороны от силовой. Напряжение пробоя изоляции 3 кВ;
- Верхний и нижний ключ независимы, каждый имеет свой гальванически развязанный драйвер и гальванически развязанный dc/dc;
- Применен современный драйвер от компании Infineon — 1EDC60I12AHXUMA1. Импульсный ток открытия/закрытия — 6А/10А. Максимальная частота — 1 МГц (проверено до 1.5 МГц стабильно);
- Аппаратная защита по току: шунт + ОУ + компаратор + оптрон;
- Максимальный ток — 20А. Ограничен не ключами, а размером радиатора и толщиной медных полигонов.
В статье фигурирует 1-я ревизия модуля, она полностью рабочая, но будет 2-я ревизия, в которой устранятся чисто конструктивные недочеты и поменяются разъемы на более удобные. После завершения создания документации, закинул gerber в PCBway и мне через 6 дней в дверь постучался курьер и вручил вот такую прелесть:

Еще через неделю наконец-то привезли на собаках комплектующие из одного прекрасного отечественного магазина. В итоге все было смонтировано:


Тут ничего сложного или магического нет. Обычный полумост: 2 ключа внизу, 2 вверху, можете паять по одному. Драйвер как выше писал из семейства 1ED, очень злой и бессмертный. Везде по питанию есть индикация, включая +12В на выходе dc/dc. Защита реализована на логическом элементе AND, в случае превышения тока компаратор выдаст +3.3В, они засветят оптрон и он притянет один из входов AND к земле, что означает установление лог.0 и ШИМ-сигнал с драйверов пропадет. AND с 3-мя входами использован специально, в следующей ревизии планирую сделать еще и защиту от перегрева радиатором и завести сигнал ошибки туда же. Все исходники будут в конце статьи.
Собираем макет инвертора
Долго думал на чем бы продемонстрировать работу модуля, чтобы и не сильно скучно, и полезно, и не сильно сложно, чтобы повторить мог любой. Поэтому остановился на инверторе напряжения, такие используют для работы с солнечными панелями, если что-то бахнет по низковольтной стороне — не страшно, а по высоковольтной — просто когда включите не суйте туда руки.
Сам инвертор до безобразия простой, кстати, МАП Энергия клепают именно такие, вот вам пример даже коммерческой реализации сей идеи. Работа инвертора заключается в том, чтобы сформировать из постоянного напряжения 12В переменное синусоидальной формы с частотой 50 Гц, ведь именно с таким привык работать обычный трансформатор на 50 Гц. Я использую какой-то советский, вроде ОСМ, 220В обмотка заводская и используется как вторичка, а первичная
8В намотана медной шиной. Выглядит это так:

И это чудовище всего на 400 Вт! Вес трансформатора около 5-7 кг по ощущениям, если уронить на ногу, то в армию точно не возьмут. Собственно в этом и заключается минус инверторов с «железными» трансформаторами, они огромные и тяжелые. Плюс их в том, что данные инверторы оооочень простые, не требует никакого опыта для создания и конечно же дешевые.
Теперь давайте соединим модули и трансформатор. На самом деле модуль для разработчика должен представляться просто как «черный ящик» у которого есть вход 2-х ШИМов и 3 силовых вывода: VCC, GND и собственно выход полумоста.

Теперь из этих «черных ящиков» давайте изобразим наш инвертор:

Ага, понадобилось всего 3 внешних элемента: трансформатор + LC фильтр. Для последнего дроссель я изготовил просто намотав провод от модуля до трансформатора на кольцо из материала Kool Mu размер R32 с проницаемость 60, индуктивность около 10 мкГн. Конечно же дроссель надо бы рассчитать, но нам же надо за 15 минут)) Вообще если будете гонять что-то подобное на 400 Вт, то нужно кольцо размером R46 (это внешний диаметр). Емкость — 1-10 мкФ пленка, этого достаточно. На самом деле в качестве экономии можно конденсатор не ставить, ибо емкость обмотки трансформатора здоровая… в общем у китайцев и МАПа именно так и сделали)) Дроссель выглядит вот так:

Остается накинуть тестовую нагрузку на выход, у меня это пара светодиодных лампочек на 20 Вт (ничего другого наглядного не оказалось под рукой), сами они кушают 24Вт, КПД однако. Так же ток холостого хода трансформатора около 1А. С АКБ будет кушать около 5А. В итоге имеем такой стенд:

Так же в макете используется АКБ Delta HR12-17 соответственно на 12В и емкостью 17 А*ч. Управлять преобразователем будем с отладочной платы STM32F469-Discovery.
Изначально для управления предполагалось использовать мою STM32VL-Disco, полученную на выставке еще в 2010-м, но так случилось, что именно на этом макете ей суждено было умереть уже когда весь код написан и макет запущен. Забыл про щупы осциллографа и объединил 2 земли, аминь. В итоге все было переписано на STM32F469NIH6, именно эта отладка имелась под рукой, поэтому будет 2 проекта: для F100 и для F469, оба проверены. Проект собран для TrueSTUDIO, версия эклипса от ST.
Вообще в своей другой статье ооочень подробно и наглядно рассказал как формировать синусоидальный сигнал, как писать код и прочее прочее. Прочитать можно — тут.
Прочитали? Хотите собрать? Держите проект:

Стоит обратить внимание, что я на один полумост (модуль) подаю 2 сигнала, рисующих синус, а на другой 2 сигнала задающие 50 Гц. При чем одна диагональ «красный+желтый», а другая «синий+зеленый». В статье, что дал выше про это подробно написано, если вдруг не поняли. Теперь как подали сигналы, накидываем на оба полумоста +12В и GND от лабораторного блока питания. Сразу АКБ не советую, если где-то ошиблись, то может сгореть что-то. Защита на плате спасает от превышения тока, но не от явных косяков, когда плюс и минус перепутали, а вот лабораторник спасает. 12В и 1А для тестов хватит. Берем щуп осциллографа, его земляной провод на выход первого полумоста, а сам щуп на выход другого полумоста и должна быть такая картинка:

Где синус спросите вы? Дело в том, что сопротивление входа осциллографа большое и он не представляет из себя нагрузку, поэтому ток не протекает и синусу взяться не откуда. Добавим нагрузку, я смастерил из резисторов 10 Ом нагрузку 90 Ом просто включив последовательно 9 штук. Цепляем нагрузку к выходам полумостов и видим такую картину:

У вас так же? Значит пришла пора подключать дроссель, трансформатор, нагрузку и пробовать запускать. Achtung! Нельзя включать данный макет без нагрузки, ибо на холостом ходе на выходе может быть до 350. 380В. Чтобы такого не было нужна нагрузка или ОС. Последней у нас не будет, это тема отдельной статьи, можете в качестве факультатива прикрутить П-регулятор простейший, шаблон проекта у вас уже есть.
Включение
После включения получаем на выходе около 230В, выход конечно не стабилизированный и будет плавать 230В +-30В, для тестов пойдет, в другой статье доработаем макет как решусь рассказать про П и ПИ-регуляторы и их реализацию.
Теперь можно насладиться результатом работы, а при необходимости упихать все в коробку и даже применить в хозяйстве или на даче для обеспечения себя светом и прочими прелестями.
Вы наверняка заметили задержку между «щелчком», то есть подачей питания на Discovery и включением ламп — это время, которое МК потратил на инициализацию. Эту задержку можно уменьшить, если писать в регистр разом одну цифру, а не дробить запись регистра на кучу строк. Я раздробил исключительно для наглядности. Хотя и это не страшно, с кодом на HAL задержка в 3 раза дольше и народ как-то живет с ним))
Пока не забыл, исходники проекта:
- Принципиальна схема — PDF
- BOM — Excel
- Gerber-files — RAR
Осталось посмотреть как там с температурами на плате, нет ли каких-то особо горячих мест. 5-6А это конечно мало, но если сквозной ток идет или еще какая серьезная ошибка, то этого хватит, чтобы превратить плату в чайник:

Как видите самым горячим элементом является dc/dc модуль для гальванической развязки, это который на 2 Вт, он нагревается аж до 34 градусов, ну еще и шунт. Сами же транзисторы и радиатор имеют температуру окружающей среды после 30 минут работы преобразователя))
Благодарности и планы
В ближайшее время я планирую написать про DSP board и по управлять уже не с отладки discovery, а уже со «специализированного» модуля. Платы 2-й ревизии на него уже пришли от тех же PCBway, жду компоненты и сразу писать.
Надеюсь статья и сама идея вам понравились. В дальнейшем на этих же модулях покажу как собрать частотник, mppt контроллер, а может и еще чего интересного. Если у вас есть вопросы, то не стесняйтесь их задавать в комментариях или в личку, если у вас вдруг нет полноценного аккаунта, постараюсь ответить на все вопросы.
Теперь немного благодарностей компании PCBway, на самом деле очень хорошо, что они поддерживают open source движуху. Может скоро железячники даже догонять софтописателей по количеству и качеству открытых проектов.
Поскольку современные разработки массового электропривода для промышленных приложений и бытовой техники ориентированы в основном на применение трехфазных асинхронных электродвигателей и бесконтактных двигателей постоянного тока, компания International Rectifier уделяет большое внимание совершенствованию соответствующей элементной базы, в том числе высоковольтных микросхем драйверов МОП-затворов. ИС трехфазных драйверов являются наиболее перспективным техническим решением для управления инверторами приводов мощностью до нескольких киловатт. Они позволяют интегрировать на одном кристалле необходимый набор функций управления и защиты силовой электроники, создавать наиболее простую, компактную и стабильную схему управления, не требуют сложных схем питания, обладают высоким быстродействием. Рост требований к силовой электронике массового привода, прежде всего по цене, компактности, КПД, надежности, отражается и на требованиях к драйверам. Технология драйверов 5-го поколения была разработана компанией IR специально для того, чтобы иметь возможность удовлетворять эти растущие требования на длительную перспективу. Эта технология позволяет повысить уровень интеграции функциональных возможностей при сохранении площади кристалла и цены.
В новых разработках драйверов IR для электропривода мощностью до нескольких киловатт можно выделить два основных направления.
Первое преследует цель создания максимально компактных ИС с минимальной ценой при ограниченном росте функциональных возможностей. Эти ИС предназначены для замены ИС предыдущего поколения при модернизации электроники привода, с целью снижения цены и упрощения схемотехники.
Второе направлено на разработку ИС для привода нового поколения с существенно более высокой эффективностью, широким набором функциональных возможностей при сохранении уровней цены и сложности схемотехники.
В рамках этих направлений IR уже приступила к серийному производству нескольких новых семейств драйверов.
Трехфазные драйверы для модернизации серийной продукции
Первым из новых семейств этого направления является серия IRS2336Dx, которая должна заменить популярную серию IR2136x предыдущего поколения.
Общая характеристика серии
Рис. 1. Схема включения ИС серии IRS2336xD
Она во многом схожа со схемой для драйверов серии IR2136x, отсутствует лишь цепь бутстрепного ультрабыстрого диода.
Для упрощения перехода со старых ИС серии IR2136x на новые сохранено расположение и назначение выводов. ИС имеет 6 входов управления ключами инвертора (HIN-верхними, LIN-нижними), совместимых с КМОП- и ТТЛ-логикой любого уровня (включая 3,3 В), что позволяет реализовать управление драйвером напрямую от микроконтроллера. Выходы управления ключами инвертора (HO-верхние, LO-нижние) синфазны со входами HIN, LIN у драйвера IRS23364D и находятся в противофазе у IRS2336D.
Типовой уровень выходных токов драйверов новой серии (выводы HO, LO микросхемы) составляет 180 мА и 330 мА (втекающий/вытекающий ток затвора). Графики из справочных листов драйверов серии IRS2336xD (рис. 2) помогут подобрать частоту переключения драйверов при известных величине заряда затвора ключей инвертора и напряжении шины постоянного тока.
Рис. 2. Зависимость максимальной частоты переключения драйвера от заряда затвора транзистора и напряжения шины постоянного тока
Интегрированный бутстрепный контур
Рис. 3. Подключение BootFET в ИС IRS2336xD
Интегральные BootFET включены только при высоком уровне выходов LO управления нижними ключами инвертора (рис. 4).
Рис. 4. График состояния BootFET
Напряжение Vвs на конденсаторе между выходами B и S циклически повышается в зависимости от времени нахождения выхода LO на низком уровне, емкости конденсатора, напряжения исток-сток (коллектор-эмиттер) и падения напряжения на антипараллельном диоде инвертора. Временные диаграммы бустрепных транзисторов примерно повторяют состояние выходов LO. BootFET находятся в проводящем состоянии при высоком уровне выхода LO и когда Vвs не превышает напряжение питания микросхемы Vcc (равное 15 В) более чем на 10%.
Интегральные бутстрепные транзисторы способны заменить внешние бутстрепные диоды в большинстве практических приложений. Ограничения в их применении могут быть связаны или со специфической схемотехникой (например, при реализации схем 6-шаговой модуляции) или с более низким, чем у ультрабыстрых диодов, быстродействием (в типовых бутстреных цепях обычно применяют диоды со временем обратного восстановления 100 нс). В этих случаях задача может быть решена дополнением схемы включения обычной бутстрепной цепью с ультрабыстрым диодом.
Повышенная устойчивость к помехам
С целью обеспечения высокой помехоустойчивости в драйверах новой серии сохранено разделение сигнальной и силовой земли, как это ранее было сделано в серии IR2136x. Выход сигнальной земли Vss используется в схемах защиты от перегрузки по току и формирования управления на входах HIN, LIN. Выход силовой земли COM совместно с выходами LO применяется при формировании управления нижними ключами инвертора. Помимо этого в новых драйверах применяются усовершенствованные входные фильтры. Отличие в логике работы такого фильтра иллюстрирует рис. 5.
Рис. 5. Логика работы обычного и усовершенствованного входных фильтров
Рис. 6. Длительность импульса на выходе усовершенствованного входного фильтра
В драйверах серии IRS2336xD усовершенствованные входные фильтры установлены на входах HIN, LIN управления инвертором (время фильтрации 350 нс) и на входе EN (200 нс).
Обеспечение надежного управления ключами инвертора
Специальная логическая схема устанавливает низкий уровень на выходах управления затворами верхнего и нижнего ключей при одновременном появлении высокого логического уровня на входах управления, тем самым блокируя работу драйвера.
В динамическом режиме работы драйвера разброс времен задержки между входным и выходным сигналами и фронтов выходных сигналов каналов драйвера может привести к перекрытию выходных сигналов и нежелательному срабатыванию ключей инвертора. Для предотвращения этого в схеме драйвера предусмотрен логический узел, который обеспечивает одинаковое время срабатывания верхнего и нижнего каналов драйвера, управляющих стойкой инвертора. Максимальная разница времен срабатывания составляет 50 нс (параметр МТ справочного листа). Помимо этого устраняется разница во временах срабатывания как между нижними, так и между верхними ключами.
Высокая устойчивость к отрицательному смещению на выходе
Напряжение на выходах трехфазного инвертора (средние точки стоек) при идеальных условиях работы меняется от нуля (шина нулевого потенциала) до напряжения шины постоянного тока. На средней точке стойки Vs может за короткое время возникнуть значительное отрицательное смещение, которое будет передано на выход драйвера. Причиной этого может быть наличие индуктивной нагрузки, паразитные индуктивности в стойках инвертора, коммутация больших токов в течение коротких промежутков времени. Такая ситуация может происходить как в рабочем режиме, так и в режиме короткого замыкания, выключения при перегрузке по току и т.д. Драйверы новой серии способны успешно противостоять таким воздействиям. График на рис. 7 иллюстрирует возможность работы драйверов серии IRS2336xD при ударных отрицательных смещениях напряжения до минус 60 В.
Рис. 7. Устойчивость к отрицательному смещению на выходе (средней точке стойки) в зависимости от времени
С учетом этого драйверы новой серии являются гораздо более надежными силовыми ИС для управления инверторами приводов в реальных условиях эксплуатации.
Функции защиты
В новых ИС сохранены функции защиты, реализованные ранее в ИС серии IR2136x.
Рисунок 8 иллюстрирует вторую из этих ситуаций. При высоком уровне сигнала на выводе ITRIP напряжение на выводах VRCIN и VFAULT снижается до уровня на выводе Vss (сигнальная земля).
Рис. 8. Временные диаграммы работы таймера и выхода FAULT
Когда уровень сигнала на выводе ITRIP становится низким, запускается таймер, который спустя время tFLTCLR (определяется постоянной времени RС-цепи) производит сброс входа FAULT, уровень сигнала на котором снова становится высоким.
Рис. 9. Схема обнаружения перегрузки по току
Аналогичным образом может быть обеспечена защита от перегрева. Параметры термистора Rt и резисторов R3, R4 должны быть выбраны таким образом, чтобы пороговое напряжение 0,46 В было достигнуто при максимально допустимой температуре. Рисунок 9 показывает, как обеспечить одновременную реализацию этих возможностей с помощью развязывающих диодов.
Литература
1. Data sheet IR2136x
2. Data sheet IRS2336xD.

Силовой миниблок для сильноточных POL-конверторов
Поскольку новая микросхема содержит все важные с точки зрения качества преобразования полупроводниковые и пассивные компоненты, то для создания высококачественного преобразователя требуется дополнительно всего несколько пассивных мощных компонентов. При этом существенно снижаются требования к квалификации разработчика и печатной плате. Особенностями iP1206PBF являются постоянная частота ШИМ 600 кГц в каналах, ограничение тока без потерь, защита от перенапряжения и перегрева, режим старта со смещением, трэкинг выходного напряжения.
Читайте также: