
Как настроить драйвер шагового двигателя drv8825
Обновлено: 01.07.2024
Драйвер шагового двигателя является достаточно важным компонентом любого ЧПУ устройства, управляя движением каждой из осей. Перед использованием необходимо убедиться, что они правильно установлены и настроены, чтобы не допустить перегорание шаговых моторов или платы контроллера Arduino Sheild.
Настройку тока драйвера необходимо сделать для решения нескольких достаточно важных моментов:
— уменьшить вероятность пропуска шагов при низком токе;
— снижение нагрева драйвера и шагового двигателя при высоком напряжении;
— снизить шум при высоких значениях тока;
Для настройки тока нам понадобится:
— контроллеры с установленными драйверами;
— драйвера А4988 или DRV8825 ;
— мультиметр;
— отвертка.
Для начала необходимо собрать и подключить всю систему в полношаговом режиме. После сборки «бутерброда» из контроллера Ардуино, ЧПУ шилда и драйверов шаговых двигателей необходимо подключить шаговые двигатели. В описании к выбранным моторам надо узнать значение максимального тока Imax (для примера у шагового двигателя 17HS8401 это значение 1,8А)
Затем надо рассчитать значение опорного напряжения Vref на переменном резисторе для каждого типа драйверов, у нас их два: А4988 или DRV8825.
Формула опорного напряжения Vref для драйверов отличается.
Расчет для драйвера типа А4988.
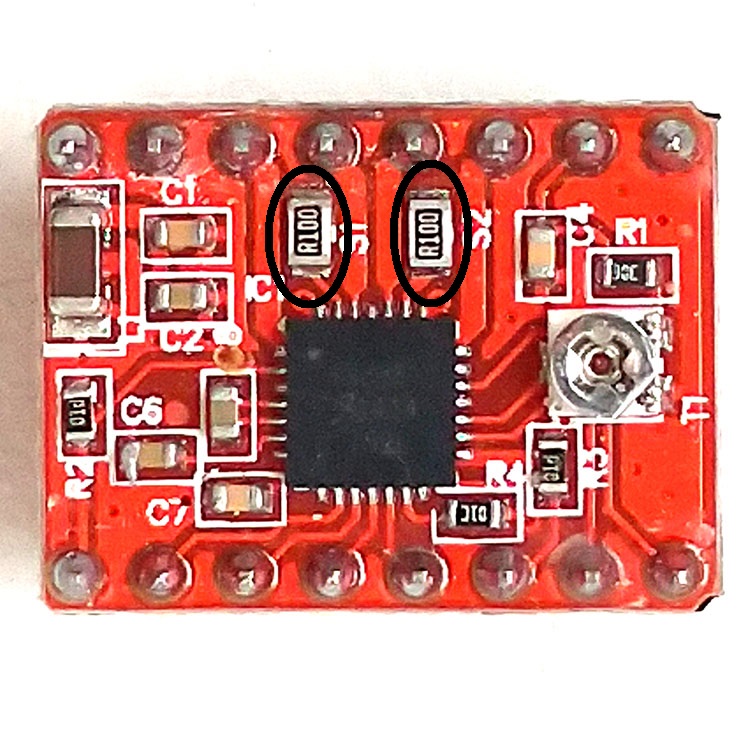
Для A4988 формула расчета зависит от номинала резисторов, которые распаяны на плате драйвера. Если присмотреться, то можно увидеть надписи R050 или R100.
На приведенной фотографии они обведены черными кружками, их значение R100.
В общем виде формула выглядит как:
Vref = Imax * 8 * (RS)
Imax — максимальный ток на обмотках двигателя, из описания;
RS — сопротивление резистора, если резистор подписан R100, то RS=0,100, при R050 значение RS=0,05.
Для двигателя из нашего примера 17HS8401
Vref = 1,8 * 8 * 0,100 = 1,44 В.
Из-за того, что рабочий ток двигателя обычно рекомендуется ограничивать в 70% от максимального тока, для уменьшения перегрева двигателя, полученное значение необходимо умножить на 0,7.
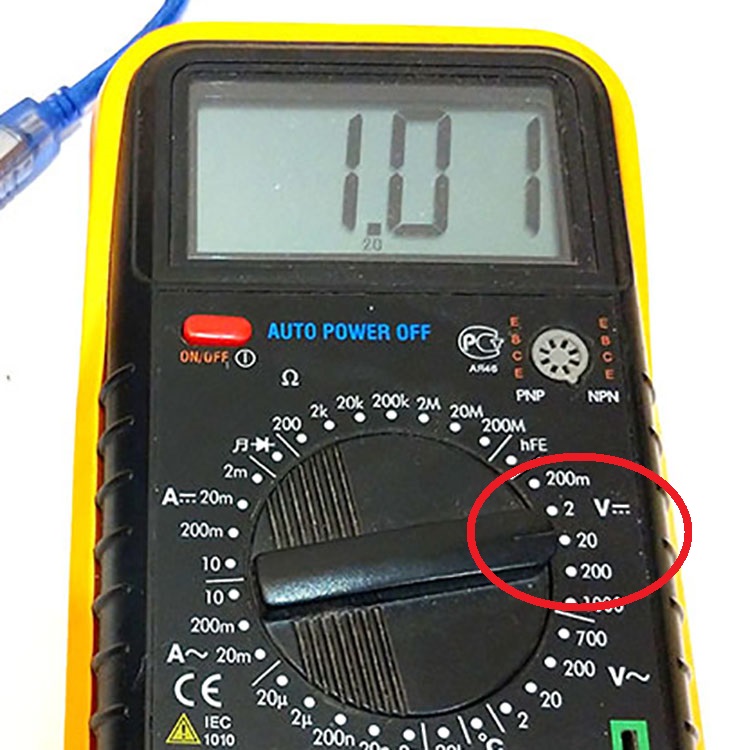
Vref= 1,44*0,7 = 1,01 В.
Расчет для драйвера типа DRV8825.
Формула опорного напряжение для данного типа драйвера:
При рекомендованной работе на 70% от максимального тока двигателя, подставив значения для нашего примера, получим следующие значения:
Vref = 0.7*1,8 / 2 = 0.63V
Настройка тока драйвера на контроллере.
Для настройки необходимо подключить сборку плат к компьютеру,
Включить на мультиметре измерение постоянного напряжения напротив положения "20".
Для измерения напряжения необходимо минусовой щуп приложить к минусу на CNC Sheild, а положительный щуп замкнуть с подстроечным резистором, который по совместительству является "+" в данной схеме.
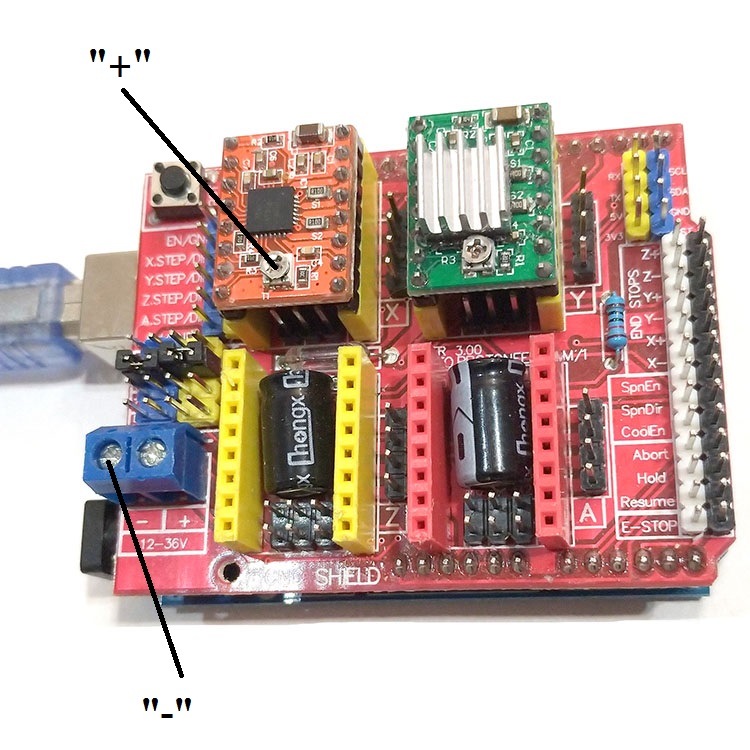
Необходимо вращать подстроечный резитор, пока мультиметр не покажет требуемое значение напряжения, при вращении по часовой стрелке, значения растут, против часовой стрелки - напряжение падает.
Настройку расчетных значений необходимо повторить это для всех активных драйверов в сборке.
В предыдущей статье уже рассмотрели самый распространённый драйвер шагового двигателя A4988. В данной статье рассмотрим еще одни, не менее популярный, драйвер шагового двигателя DRV8825 и подключим его к Arduino, а также научимся управлять шаговым двигателем. Не смотря на то, что драйвер шагового двигателя DRV8825 полностью взаимозаменяем с драйвером A4988, драйвер DRV8825 имеет ряд преимуществ: рабочее напряжение до 45В, ток до 2,5 А и деление микрошага до 1/32.
Технические характеристики драйвер DRV8825.
- Напряжение питания: от 8.2 до 45 В.
- Установка шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32.
- Напряжение логики: 3,3 В.
- Защита от перегрева: Есть.
- Максимальный ток на фазу: 1,5 А без радиатора, 2,5 А с радиатором.
- Габариты модуля: 20 мм х 15 мм х 10 мм.
- Габариты радиатора: 9 мм х 5 мм х 9 мм.
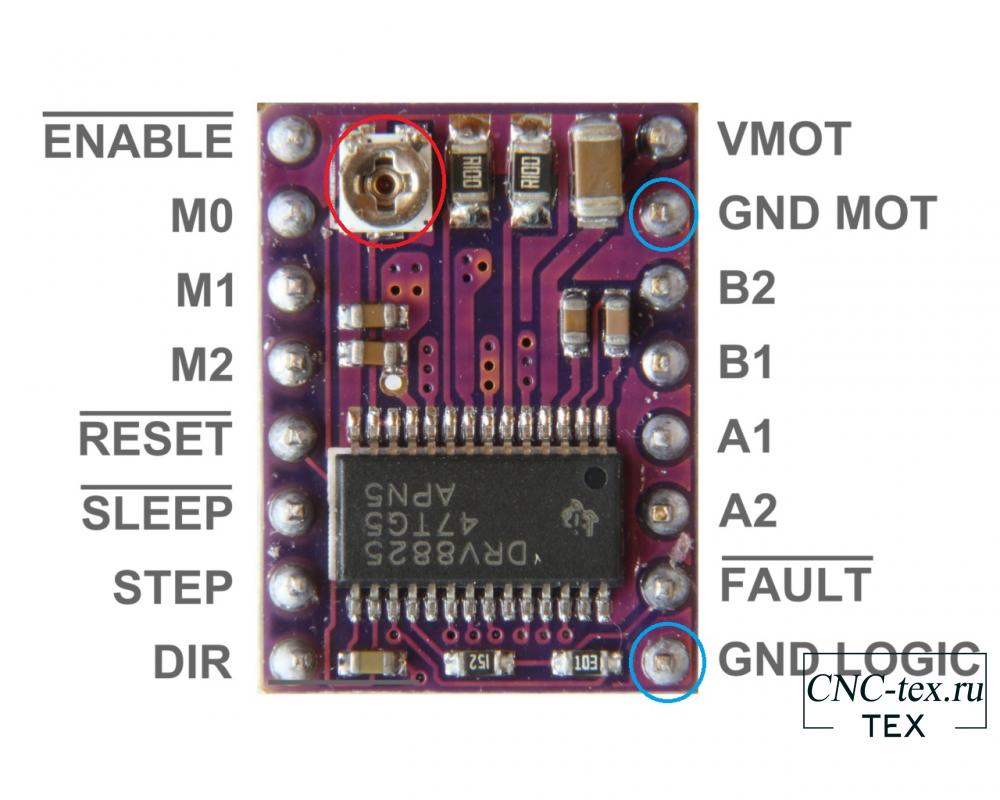
- EN — включение и выключение модуля (0 — включен, 5 В. — выключен).
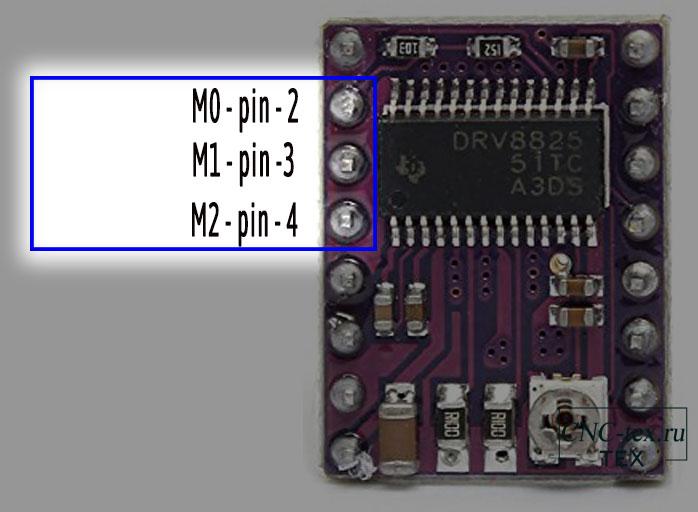
- M0, M1 и M2— выбор режима микрошаг (смотрите таблицу ниже).
- RST — сброс драйвера.
- SLP — вывод включения спящего режима, если подтянуть его к низкому состоянию драйвер перейдет в спящий режим.
- STEP — управляющий вывод, при каждом положительном импульсе, двигатель делает шаг (в зависимости от настройки микрошага), чем быстрее импульсы, тем быстрее вращается двигатель.
- DIR — управляющий вывод, если подать +5 В. двигатель будет вращаться по часовой стрелке, а если подать 0 В. против часовой стрелки.
- VMOT&GND MOT — питание шагового двигателя от 8,2 до 45 В. (обязательное наличие конденсатора на 100 мкФ.).
- B2, B1, A1, и A2 — подключение обмоток двигателя.
- FAULT — Выход включения защиты, если состояние «0», значит, полевые транзисторы H-моста отключены в результате защиты от перегрузки по току, или был перегрев.
- GND LOGIC — заземление микроконтроллера.
- Используется не правильная схема подключения.
- Не правильно настроен ток для двигателя, иногда он выкручен на минимум по умолчанию и поэтому двигатель может не работать. Далее мы это разберем.
- Не правильная программа (скетч).
- Пины которые вы используете не подходят для программы и не могут выдавать сигнал. Например на Arduino nano пины A6,A7 вообще не могут выдавать сигнал, поэтому проверяйте пины вашего контроллера на совместимость.
- Плата Arduino Uno (купить на AliExpress).
- Шаговый двигатель NEMA 17 (купить на AliExpress).
- DRV8825 Stepper Driver Module (модуль драйвера шагового двигателя) (купить на AliExpress).
- Конденсатор 47 мкФ (купить на AliExpress).
- Потенциометр (купить на AliExpress).
- рабочее напряжение: 12V DC (12 В постоянного тока);
- угол за один шаг (Step Angle): 1.8 градуса;
- 200 шагов за один полный оборот;
- число фаз: 4;
- длина двигателя: 1.54 дюйма;
- диапазон рабочих температур: от -10 до 40 °C;
- удерживающий крутящий момент: 22.2 oz-in.
- максимальное рабочее напряжение: 45 V;
- минимальное рабочее напряжение: 8.2 V;
- максимальный ток на одну фазу: 2.5 A;
- размеры печатной платы модуля: 15 mm x 20 mm.
- шесть разрешений шага: полный шаг, ½ шага, ¼ шага, 1/8 шага, 1/16 шага и 1/32 шага;
- регулируемый с помощью потенциометра выходной ток;
- режим автоматического обнаружения уменьшения тока;
- схема автоматического отключения при перегреве;
- блокировка при пониженном напряжении;
- автоматическое отключение при превышении уровня тока.
- модуль DRV8825 поддерживает 6 режимов шага, а модуль A4988 – только 5. Большее число этих режимов означает более равномерное и тихое функционирование шагового двигателя;
- минимальная длительность шага для DRV8825 составляет 1.9 мкс, а для A4988 – 1 мкс;
- без дополнительного охлаждения DRV8825 обеспечивает немного больший ток чем A4988;
- местоположение потенциометра, регулирующего лимит тока, в обоих модулях различно;
- DRV8825 может быть использован при более высоком напряжении питания;
- на контакте спящего режима (SLEEP pin) в DRV8825 по умолчанию не установлен режим с подтягивающим резистором как это сделано в A4988;
- вместо контакта напряжения питания DRV8825 имеет выходной контакт.
Общая информация о драйвере DRV8825.
Основная микросхема модуля - это драйвер от TI (Texas Instruments Inc.) DRV8825, который способен управлять одним биполярным шаговым двигателем. Данный драйвер полностью взаимозаменяемый с драйвером A4988. Микросхема DRV8825 может работать с выходным напряжением до 45 В. и током до 1,5 на катушку без радиатора и до 2,5 А. с радиатором (дополнительным охлаждением). Так же, модуль имеет внутренний стабилизатор напряжения, который напитывает логическую часть модуля напряжением 3,3 В от источника шагового питания двигателя.
Драйвер позволяет использовать шесть вариантов шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32.
Распиновка драйвера DRV8825.
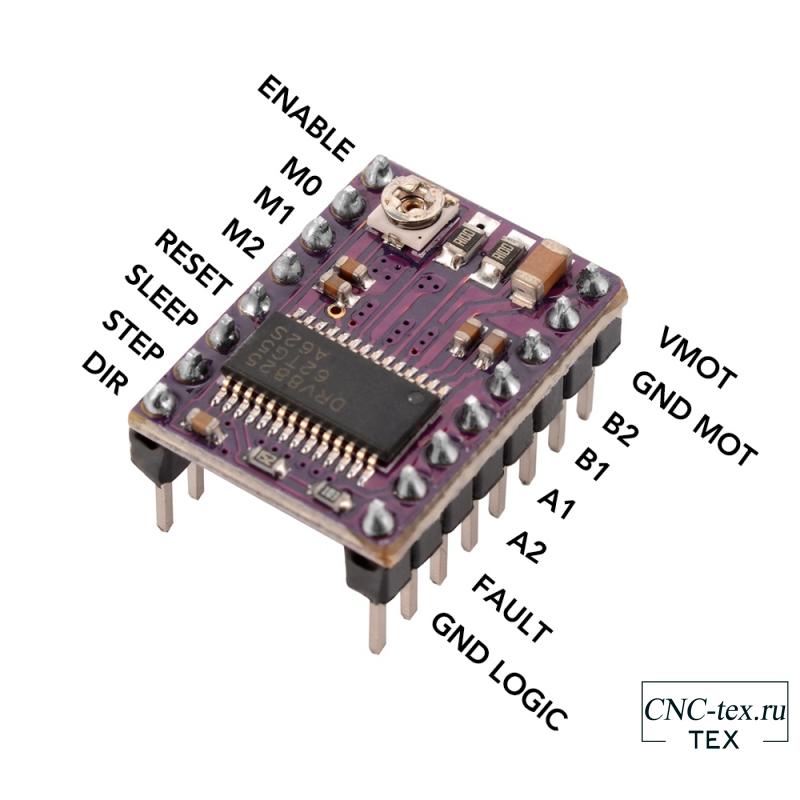
На драйвере DRV8825 расположено 16 контактов:
Подключение питания.
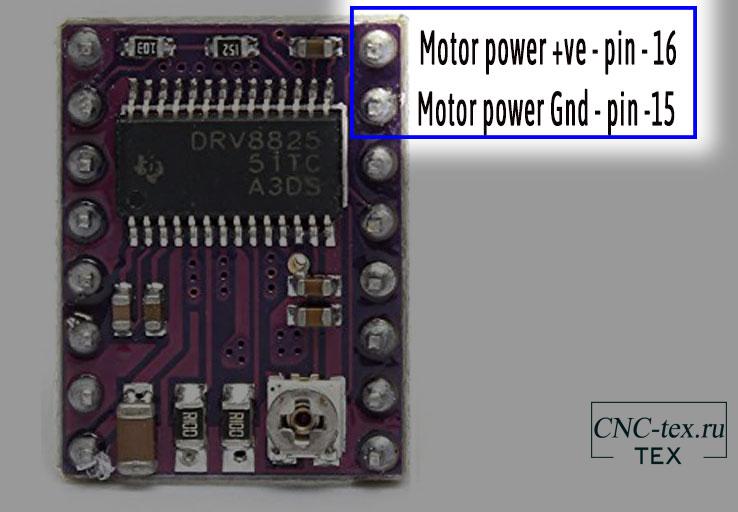
Модуль может питаться от источника постоянного тока до 45 В. и до 2,5 Ампер при 24 В. А при 45 В. номинального тока до 2,2 А. В общем случае напряжение может быть между 8 и 45 Вольт постоянного тока.
Пожалуйста, смотрите, что ваш блок питания рассчитан, по крайней мере, на 30% больше, чем максимальный ток, который может быть подан в ваш шаговый двигатель. Обратитесь к техническому паспорту производителя для того, чтобы узнать это значение.
Выводы для подключения шагового двигателя.
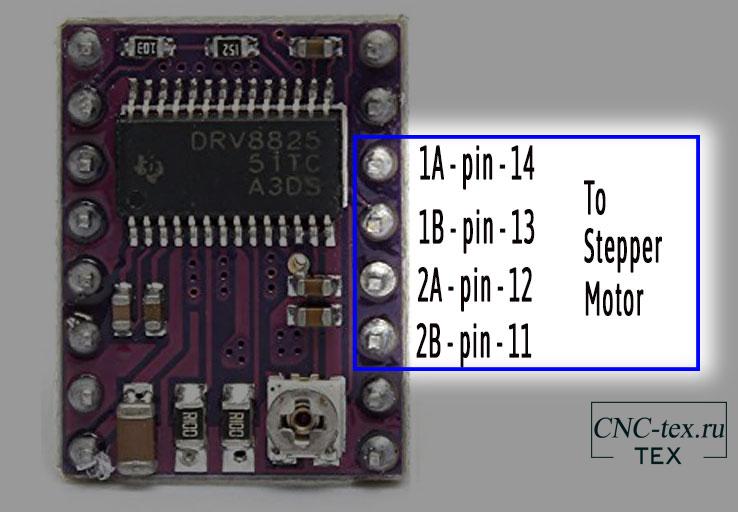
Выходные контакты: 1B, 1A, 2A ,2B.
Выводы управления.
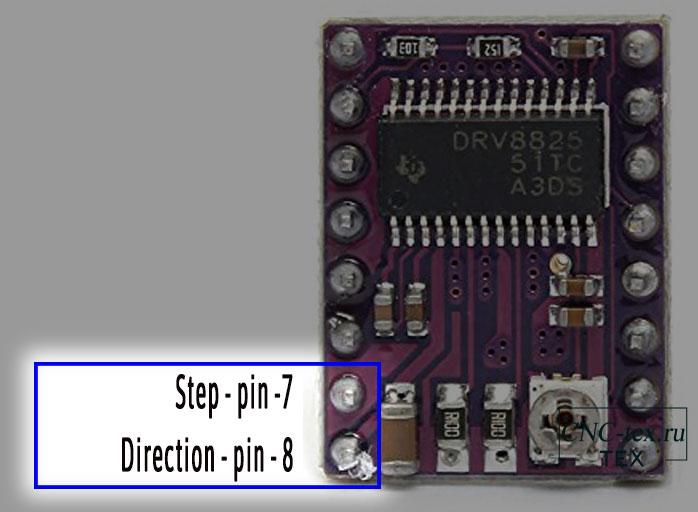
STEP — управляет микрошагом мотора. Каждый высокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращаться по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Настройка микрошага драйвера DRV8825.
Драйвер DRV8825 может работать в микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровнем. Например, если взять двигатель NEMA17 с шагом 1.8 градусов или 200 шагов на оборот, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот.
Дня настройки микрошага на драйвере DRV предусмотрены три выхода, а именно M0, M1 и M2. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.

Выводы M0, M1 и M2 в микросхеме DRV8825 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
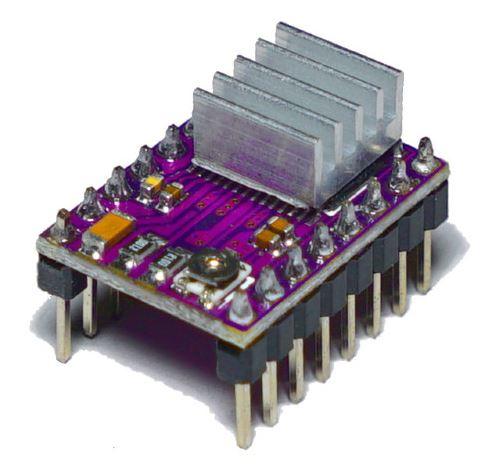
Система охлаждения DRV8825.
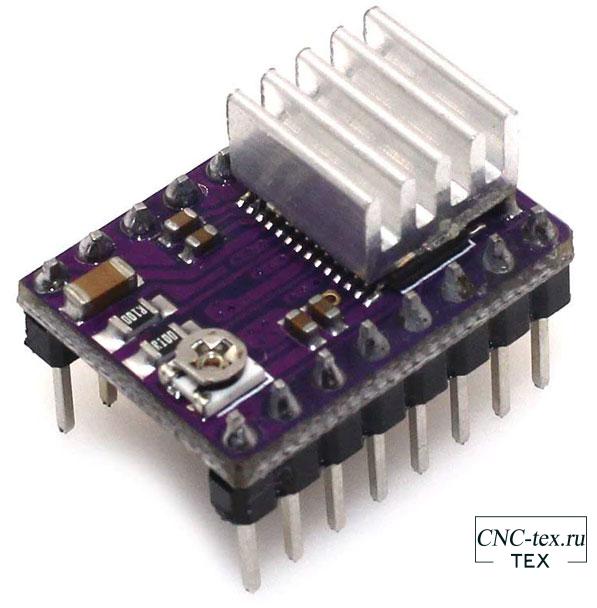
При интенсивной работе микросхемы драйвер DRV8825 начинает сильно греться и если температура превысит предельное значение, то он может сгореть. По документации DRV8825 может работать с током до 2,5 А. на катушку, но на практике микросхема не греется, если ток не превышает 1,2 А. на катушку. Поэтому если ток выше 1,2 А. необходимо устанавливать радиатор охлаждения, который идет в комплекте.
Настройка тока DRV8825.
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя, и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
Current Limit — номинальный ток двигателя.
Для примера рассмотрим двигатель NEMA 17 17HS4401 с током 1,7 А.
Vref = 1,7 / 2 = 0,85 В.
Осталось только настроить, берем отвертку и вольтметр, плюсовый щуп вольтметра устанавливаем на потенциометр, а щуп заземления на вывод GND и выставляем нужное значение.
Подключение драйвера шагового двигателя DRV8825 к Arduino UNO.
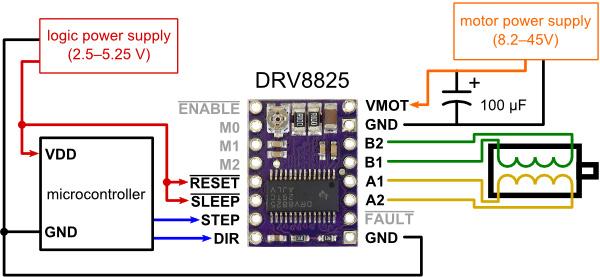
Подключим двигатель DRV8825 к Arduino UNO по схеме.
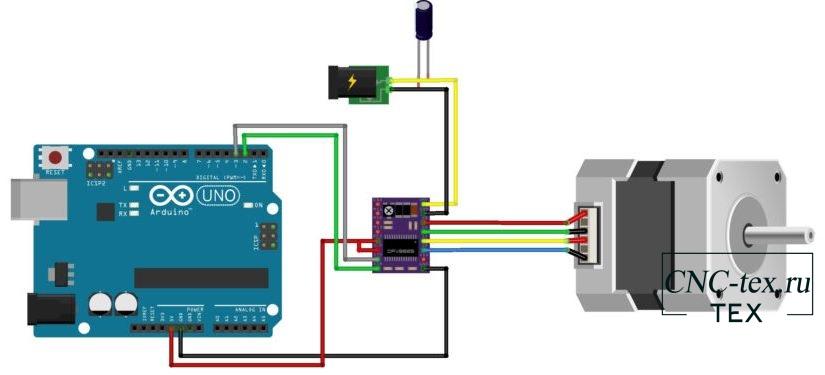
Для этого подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигателя к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. А контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ к контактам питания двигателя. В противном случае, при скачке напряжения модуль может выйти из строя.
Скетч вращения шагового двигателя NEMA 17, драйвер DRV8825.
Как уже было упомянуто выше, драйвер DRV8825 заменим драйвером A4988, поэтому и код вращения двигателем можно взять из предыдущей статьи: Драйвер шагового двигателя A4988. Но для увеличения кругозора сегодня будем использовать код вращения двигателя nema 17 без использования библиотеки.
Описание скетча:
Для работы данного скетча, не требуется никаких библиотек. Программа начинается с определения выводов Arduino, к которым подключены выводы STEP и DIR. Так же указываем stepsPerRevolution количество шагов на оборот.
В функции void setup() указываем управляющие контакты как выход.
В основной функции void loop(), вращаем двигатель по часовой стрелке, затем против, с разной скоростью.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
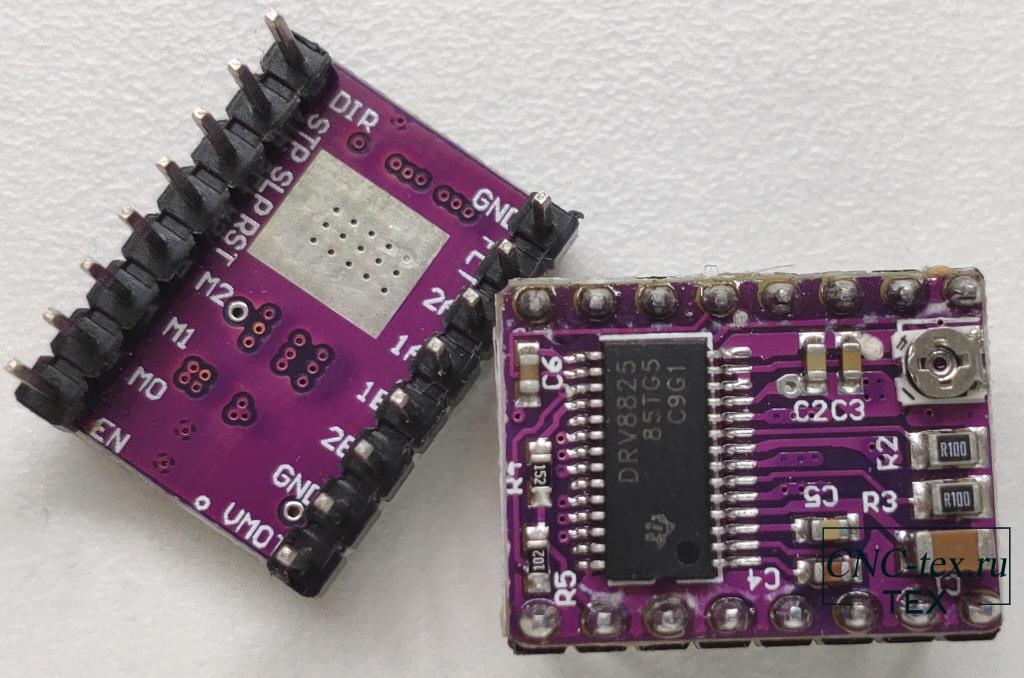
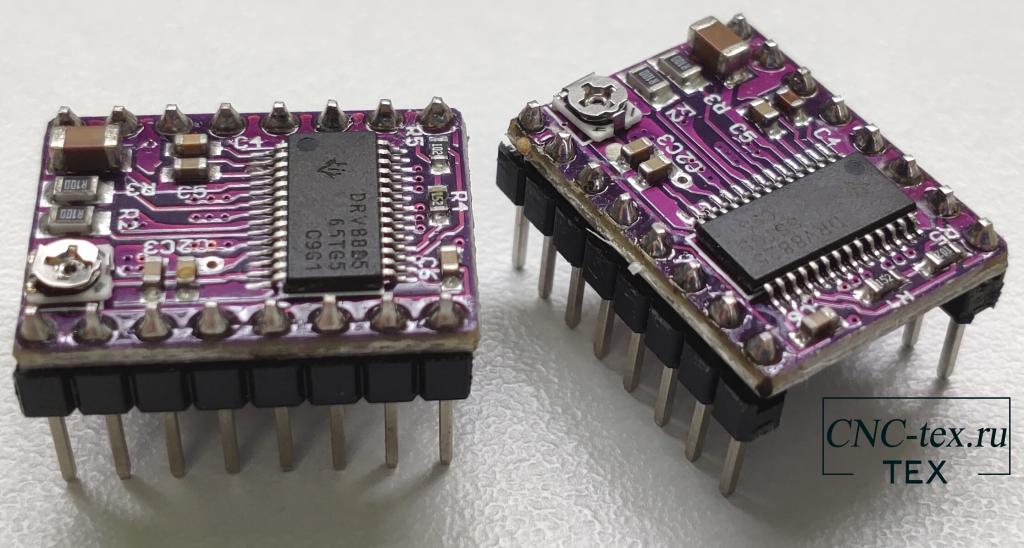
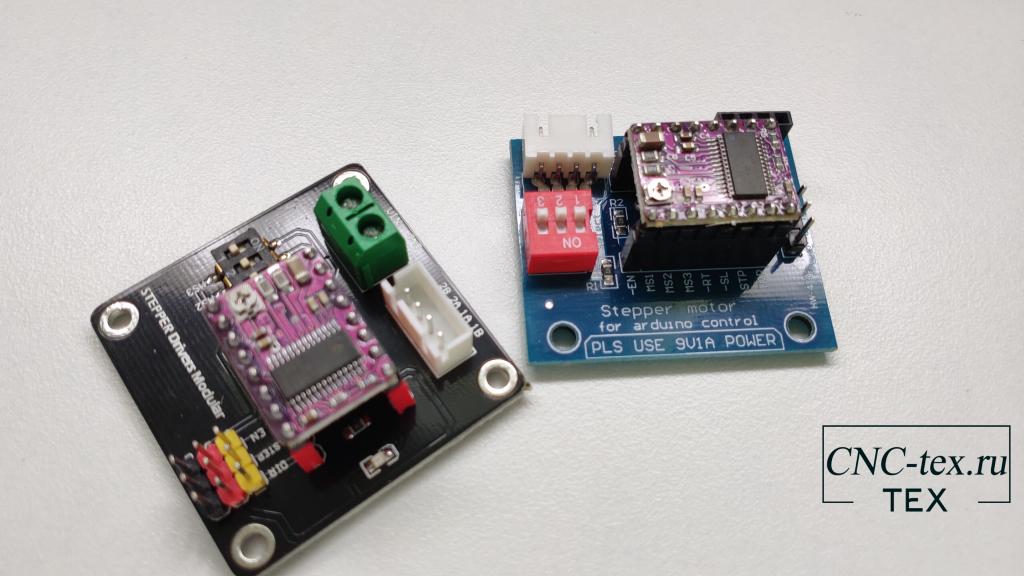
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.
Распиновку и как подключать модуль драйвера DRV8825 будем рассматривать в следующей статье.
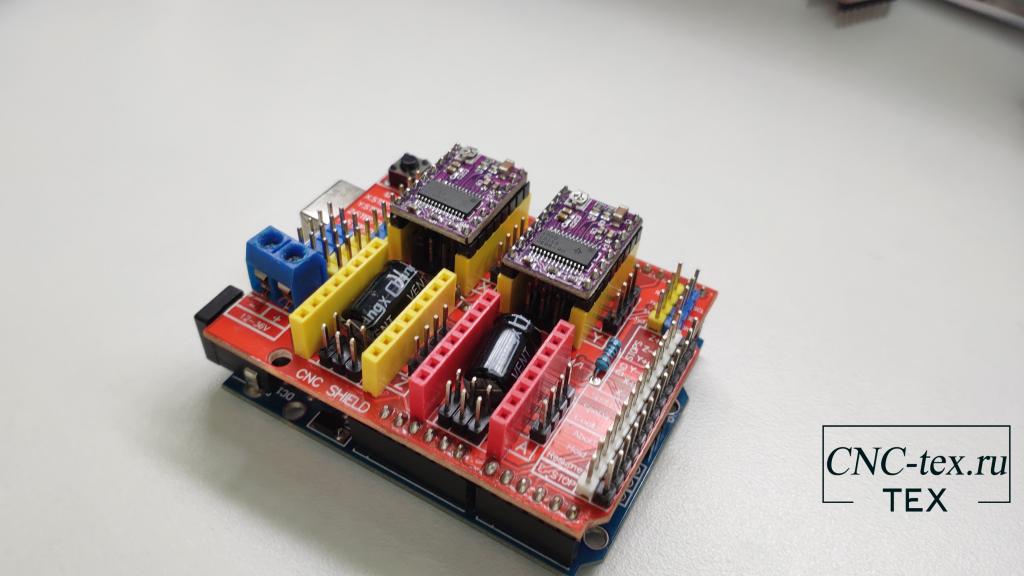
Использование драйвера DRV8825 с CNC shield v3.
Драйвер DRV8825 можно установить на CNC shield v3. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки. Более подробно CNC shield v3 будем рассматривать в следующих статьях.
Вывод можно сделать следующий. Драйвер DRV8825 обладает рядом преимуществ перед драйвером A4988. А также, при использовании драйвера шагового двигателя DRV8825, меньше шума от шаговых двигателей. Это актуально при сборке лазерного гравера, 3D принтера. Когда при работе главный источник шума - это механика и гул шаговых двигателей.
Понравился статья Драйвер шагового двигателя DRV8825? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.

В предыдущей статье рассказывало о драйвере для биполярного шагового двигателя A4988, который часто используют в проектировании станков ЧПУ. В этой статье расскажу о другом драйвере DRV8825, который полностью взаимозаменяемый с драйвером A4988 и может работать с микрошагом до 1/32, напряжением до 45 В и током до 2.5 А.
Технические параметры
► Напряжения питания: от 8,2 до 45 В
► Установка шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32
► Напряжение логики: 3.3 В
► Защита от перегрева: Есть
► Максимальный ток на фазу: 1.5 А без радиатора, 2.5 А с радиатором.
► Габариты модуля: 20 мм х 15 мм х 10 мм
► Габариты радиатора: 9 мм х 5 мм х 9 мм
Общие сведения о драйвере DRV8825
Основная микросхема модуля это драйвер от TI (Texas Instruments Inc.) DRV8825, которая способна управлять одним биполярным шаговым двигателем. Как говорил ранее данный драйвер полностью взаимозаменяемый с драйвером A4988. Микросхема DRV8825 может работать с выходным напряжение до 45 В и током до 1.5 на катушку без радиатора и до 2.5 А с радиатором (дополнительным охлаждением). Так же, модуль имеет внутренний стабилизатор напряжение, который напитывает логическую часть модуля напряжение 3.3 В от источника шагового питания двигателя.
Драйвер позволяет использовать шесть вариантов шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32

Распиновка драйвера DRV8825:
На драйвере DRV8825 расположено 16 контактов, назначение каждого можно посмотреть ниже:

Настройка микрошага
Драйвер DRV8825 может работать микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровням. Например, если взять двигатель NEMA17 с шагом 1.8 или 200 оборотов, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот
Дня настройки микрошагов на драйвере DRV предусмотрены три выхода, а именно M0, M1 и M2. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.

Вывода M0, M1 и M2 в микросхеме DRV8825 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
Система охлаждения DRV8825
При интенсивной работе микросхемы DRV8825 начинает сильно греется и если температура превысит придельные значение, может сгореть. По документации DRV8825 может работать с током до 2.5 А на катушку, но на практике микросхема не греется если ток не превышает 1.2 А на катушку. Поэтому если ток выше 1.2 А необходимо устанавливать радиатор охлаждения, который идет в комплекте.

Настройка тока DRV8825
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
Vref = 1,7 / 2 = 0,85 В
Осталось только настроить, берем отвертку и вольтметр, плюсовой шуп вольтметра устанавливаем на потенциометр, а шуп заземления на вывод GND и выставляем нужное значение.

Подключение драйвера шагового двигателя DRV8825 к Arduino UNO
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер шагового двигателя DRV8825 x 1 шт.
► Шаговый двигатель 17HS4401 x 1 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Теперь, можно приступить к сборке схемы. Первым делом подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигатель к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. Так-же контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ, в противном случаи при скачке напряжение, модуль может выйти из строя.

Программа:
Теперь можно приступки к программной части и начать управлять шаговым двигателем с помощью драйвера DRV8825, загружайте данный скетч в Arduino.
DRV8825 - Это драйвер шагового двигателя, с током до 2.2А и возможностью делить шаги микрошагом вплоть до 1/32. Драйвер пользуется популярностью из-за того, что рассчитан на хороший ток, хорошо делит шаги и его можно легко установить в в плату RAMPS 1.4.
Питание: от 8.2в - 45в
Микрошаг: 1/2, 1/4, 1/8, 1/16, 1/32
Ток: без радиатора до 1.5А на обмотку и 2.2А с радиатором
Защита: От перегрева, от перегрузки по току
Размеры: 20 х 15 х 10 мм
Как настроить микрошаг на DRV8825
Микрошаг, на этом драйвере, выбирается путем подачи нужных напряжений на пины M0, M1, M2. Ниже я приведу таблицу напряжений для разного деления шага. На пинах должен получаться либо высокий либо низкий уровень напряжения, в частности, можно брать напряжение пинов Arduino 5v и все будет работать как надо.

Выбор большего деления шага, дает возможность увеличить разрешение движения, но точность от этого немного страдает, а так же сильно уменьшается момент двигателя.
Подключение драйвера шагового двигателя к arduino
У каждого радиолюбителя возникает тот момент, когда ему необходимо подключить к своему микроконтроллеру шаговый двигатель. Конечно, скажете вы, в "Интернетах" есть куча схем, готовых библиотек и все уже разжевано давным давно. Однако, когда я решил подключить к своей arduino nano драйвер DRV8825 и полез в интернет за схемкой, то обнаружил, что схем несколько. Если быть точным я нашел их 2.
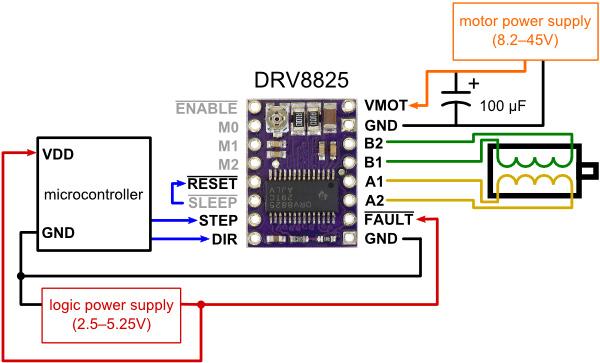
Посмотрев несколько статей, устройств, схем, я пришел к выводу, что вторя схема правильная (нет) и растравил плату. Собрав ее, долго думал почему на двигатель не поступает питание. Я менял драйвера как перчатки, но после 4 штук подумал, что дело не может быть в драйверах. Решил подать питание так как показано на первой схеме. И о чудо! Оно живое!
Возможно, только у меня такие драйвера ( или кривые руки ), однако запустилась только первая схема, которую я теперь постоянно и использую.
Возможные проблемы при подключении DRV8825 к Arduino или другому микроконтроллеру.
Подключение DRV8825 к плате RAMPS 1.4
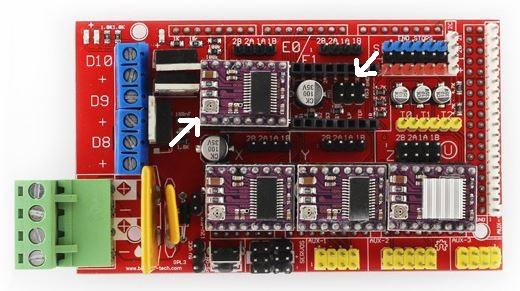
На фото показано каким образом необходимо ставить драйвера на плате. Перемычки микрошага находятся под самими драйверами и подписаны M0, M1, M2 (иногда ms0, ms1, ms2).
Как настроить ток на шаговом двигателе.
У каждого двигателя свой ток работы. Для того, что-бы он правильно работал, необходимо правильно ограничить ток на плате драйвера. Для этого на платах есть потенциометр.
Для начала нужно рассчитать VRef, делается это очень просто.
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Что-бы двигатель не перегревался часто Vref снижают.
Ставим щупы мультиметра так, как показано на картинке выше, меряем, что у нас там и крутим в ту или иную сторону для достижения нужного результата. Двигатель в этот момент будет менять свой звук работы.
Отлично! Ток настроен, а драйвер правильно подключен!
Скетч для проверки драйвера шагового двигателя
Кстати купить данный драйвер можно на Aliexpress:
Так же вы можете прочитать про подключение и настройку популярного драйвера a4988 по ссылке.
Шаговые двигатели – это разновидность двигателей постоянного тока, в которых перемещение ротора происходит небольшими дискретными шагами. В настоящее время шаговые двигатели находят очень широкое применение – начиная от камер наблюдения и заканчивая сложными роботами и механизмами.

В данной статье мы рассмотрим управление шаговым двигателем NEMA 17 с помощью платы Arduino и драйвера двигателя DRV8825. Для управления вращением шагового двигателя мы будем использовать потенциометр. Также на нашем сайте вы можете посмотреть статью об управлении шаговым двигателем NEMA 17 с помощью Arduino и драйвера A4988.
Необходимые компоненты
Шаговый двигатель NEMA17
Принцип действия шагового двигателя Nema17 аналогичен работе других шаговых двигателей. Более подробно о принципах работы шаговых двигателей можно прочитать в статье про подключение шагового двигателя к микроконтроллеру AVR.

Шаговый двигатель NEMA 17 имеет плиту размером 1.7 x 1.7 дюйма и он имеет больший крутящий момент по сравнению с другими аналогичными шаговыми двигателями меньшего размера, например, NEMA 14. Данный двигатель имеет 6 подводящих проводов и работает от напряжения 12 В. Он может работать и от напряжения меньшей величины, однако при этом соответствующим образом будет уменьшаться и его крутящий момент.
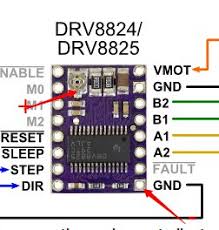
При каждом шаге ось двигателя NEMA17 поворачивается на угол, равный 1.8 градуса. Схема расположения подводящих проводов двигателя NEMA17 представлена на следующем рисунке.

Как вы можете видеть из представленного рисунка, шаговый двигатель NEMA17 имеет униполярное расположение 6 проводов. Эти провода подсоединены к двум раздельным обмоткам. Черный, желтый и зеленый провода подключены к первой обмотке, а красный, белый, и синий провода – к другой обмотке. В обычном режиме центральные провода обмоток (черный и белый) оставляют неподключенными.
Число шагов за оборот для двигателя NEMA17
Число шагов за полный оборот (Steps per Revolution) для каждого определенного шагового двигателя рассчитывается с помощью угла, на который поворачивается шаговый двигатель за один шаг (step angle). Для двигателя NEMA17 этот шаг равен 1.8 градуса, соответственно, получаем:
Steps per Revolution = 360/ step angle
360/1.8 = 200 Steps Per Revolution
Технические характеристики двигателя Nema 17
Также на нашем сайте вы можете посмотреть все проекты, в которых были использованы шаговые двигатели.
DRV8825 – модуль драйвера шагового двигателя Nema 17
Модуль драйвера шагового двигателя управляет работой шагового двигателя, подавая на него различные фазы питания в необходимые моменты времени.
DRV8825 представляет собой модуль драйвера двигателя, похожий на модуль A4988. Он используется для управления биполярными (двухполюсными) шаговыми двигателями. Модуль DRV8825 имеет встроенный транслятор (преобразователь), что позволяет ему управлять и скоростью, и направлением вращения шаговых двигателей таких как NEMA 17 с использованием только двух контактов - STEP и DIR. Контакт STEP используется для управления шагами, а контакт DIR – для управления направлением вращения.

Драйвер двигателя DRV8825 может управлять работой шагового двигателя в 6 различных режимах: полного шага, половины шага, четверти шага, 1/8 шага, 1/16 шага и 1/32 шага. Вы можете изменить разрешающую способность шага используя контакты для управления микро шагами (M0, M1 и M2). Устанавливая соответствующие логические уровни на этих контактах мы можем устанавливать одно из шести разрешений шага. Таблица значений данных контактов для установки различных разрешений шага выглядит следующим образом:

Технические характеристики модуль драйвера шагового двигателя DRV8825:
Различия между драйверами двигателя DRV8825 и A4988
Оба этих драйвера двигателя предназначены для управления шаговым двигателем Nema 17, имеют похожую распиновку и области применения, но они отличаются в количестве микрошагов, рабочем напряжении и т.д. Ниже приведены следующие ключевые отличия этих модулей драйвера двигателя:
Схема проекта
Схема управления шаговым двигателем NEMA 17 с помощью Arduino и драйвера DRV8825 представлена на следующем рисунке.

Как видно из представленной схемы, шаговый двигатель запитывается от напряжения 12V, а модуль DRV8825 запитывается от платы Arduino. Контакты RST и SLEEP модуля подключены к контакту 5V платы Arduino чтобы модуль драйвера был готов к работе/доступен (enabled). Потенциометр подключен к контакту A0 платы Arduino – он используется для управления направлением вращения двигателя. Если вы будете поворачивать потенциометр по часовой стрелке, то и шаговый двигатель будет вращаться по часовой стрелке, а если вы будете поворачивать потенциометр против часовой стрелки, то и шаговый двигатель будет вращаться против часовой стрелки. Конденсатор 47 мкФ используется для защиты платы от выбросов напряжения. Контакты M0, M1 и M2 модуля драйвера двигателя оставлены в свободном состоянии, что означает что драйвер двигателя будет функционировать в режиме полного шага.
Внешний вид собранной конструкции проекта показан на следующем рисунке.

Таблица соединений платы Arduino, шагового двигателя Nema 17 и модуля драйвера двигателя DRV8825 выглядит следующим образом.
| Контакт DRV8825 | Соединение |
| VMOT | +ve Of Battery |
| GND | -ve of Battery |
| RST | 5V of Arduino |
| SLP | 5V of Arduino |
| GND | GND of Arduino |
| STP | Pin 3 of Arduino |
| DIR | Pin 2 of Arduino |
| B2, B1, A1, A2 | шаговый двигатель |
Соблюдайте полярность подключаемого источника питания.
Ограничение тока
Перед использованием двигателя установите с помощью мультиметра предел ограничения тока для модуля DRV8825 равный 350mA. Для этого необходимо измерить ток между двумя точками GND и потенциометром и отрегулировать его до нужного значения.

Объяснение программы для Arduino
Полный код программы и видео с демонстрацией работы схемы приведены в конце статьи, здесь же мы кратко рассмотрим основные фрагменты кода.
Первым делом скачайте библиотеку для управления шаговым двигателем по следующей ссылке и добавьте ее в Arduino IDE. После этого подключите заголовочный файл этой библиотеки в программе и укажите число шагов для шагового двигателя NEMA 17 – оно равно 200.
Читайте также: