
Как подобрать драйвер для шагового двигателя
Обновлено: 07.07.2024
Если планируемый управляющий компьютер ЧПУ станка не имеет LPT порта
И так, перед вами выбор компьютера для управления станком ЧПУ или иного устройства через LPT порт. Если LPT порт имеется - все замечательно, если его нет или вам понадобился второй - эта статья будет вам в помощь. Речь пойдет о персональном компьютере (ПК) с возможностью установки плат расширения - дополнительных контроллеров. В начале необходимо определиться, какого типа свободные слоты расширения имеются на вашем ПК. Подобрать необходимую плату расширения (контроллер LPT порта) можно в нашем разделе - Платы расширения ПК. К таким контроллерам мы предоставляем драйверы. Если у вас уже имеется подходящая плата без драйверов - лучший способ найти драйвер - посмотреть маркировку чипа на плате и в любом поисковике набрать наименование чипа со словами "driver" или "драйвер". Стоит также обращать внимание на совместимость с вашей операционной системой. Вы установили плату в ПК, обновили драйвер. Возможно, в вашей операционной системе уже есть поддержка такого контроллера, и поиск ..
Вся статья

Добавлено: 06.07.2016
Подключение наборов для ЧПУ на базе интерфейсной платы к LPT порту
Пояснительная статья по подключению предлагаемых нами наборов электроники и двигателей для ЧПУ. Немного о ключевом элементе - плата с опторазвязкой к LPT порту (интерфейсная плата (ИП)). Достаточно простое электронное устройство с шинными повторителями, оптопарами, реле и ЦАП для регулировки оборотов шпинделя. На рынке ЧПУ комплектующих много похожих плат с небольшими изменениями, но данная версия прижилась в нашем ассортименте и показала себя в работе на нашем оборудовании и оборудовании наших покупателей как надежное устройство. Описание ИП можно скачать сдесь - Плата с опторазвязкой для LPT порта. В данной статье мы не будем касаться вопросов использования LPT порта с его плюсами и минусами, только практика подключения. На следующем рисунке показана архитектура подключения. Клеммы ИП можно разбить на три группы: - левая линейка - входные сигналы (датчики, кнопки); - нижняя линейка - выходные сигналы для приводов и других исполнительных устройств; ..
Вся статья
Добавлено: 06.07.2016
Подключение проводного пульта ЧПУ станка (manual pulse generator) и его настройка в управляющей программе
Добавлено: 06.07.2016
Драйвер шагового двигателя (особенности выбора и применения)
Шаговые приводы широко используются в автоматизации различных механизмов. Большим плюсом является их невысокая стоимость. В режиме работы без обратной связи должна быть гарантия, что любой управляющий сигнал будет правильно отработан. Эти вопросы прорабатываются на этапе конструирования механизмов как для электронной части так и для механической. По шаговым приводам существует много публичной литературы . Цель данной статьи - обозначить моменты выбора и использования драйвера шагового двигателя, учет которых позволят работать оборудованию правильно, без ошибок. 1. Максимальный ток. Одним из параметров шагового двигателя является максимальный ток фазной обмотки. Необходимо знать, что при использовании шагового двигателя (ШД) в режиме микрошага (не важно, какой делитель), момент двигателя уменьшается в 1.4 раза по сравнению с режимом работы ШД в полном шаге. Производители ШД и драйверов ШД рекомендуют компенсировать потерю момента увеличением максимального тока до 1 ..
Вся статья
Добавлено: 06.07.2016
Шаговый двигатель — двигатель со сложной схемой управления, которому требуется специальное электронное устройство — драйвер.

Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3, LinuxCNC или PureMotion.
Задача драйвера — изменять ток в обмотках как можно более эффективно. Поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т. п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1. Драйверы постоянного напряжения. Эти драйверы подают постоянный уровень напряжения поочередно на обмотки. Результирующий ток зависит от сопротивления обмотки, а на высоких скоростях — и от индуктивности. Эти драйверы крайне неэффективны и могут быть использованы только на очень малых скоростях.
2. Двухуровневые драйверы. В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны. Помимо прочего, они снижают нагрев двигателей. Их все еще можно иногда встретить в высококлассном оборудовании. Однако такие драйверы поддерживают только режим шага и полушага.
3. Драйверы с ШИМ. На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны. Практически все представленные сейчас на рынке драйверы как раз этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижении током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем. Иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ.
Лучше, если частота драйвера будет более 20 кГц. И вообще, чем она больше, тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, в результате шаговые моторы начинают издавать неприятный писк.
Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные.
Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей. Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т. п.
ВЫБОР ДРАЙВЕРА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ
Cила тока
Первый параметр, на который стоит обратить внимание, — это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя.
Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15–40 % больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель. С другой стороны, не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Напряжение питания
Второй момент — это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно — напряжение питания влияет на динамику (момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8–10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин, стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя, тем большее напряжение требуется для драйвера.
Существует эмпирическая формула U = 32 * √(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера. U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы PLD86, PLD880.
Наличие опторазвязанных входов
Третий аспект — наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер — устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, приобретая незнакомую модель, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Наличие механизмов подавления резонанса
Четвертый аспект — наличие механизмов подавления резонанса. Резонанс шагового двигателя — явление, которое проявляется всегда. Разница состоит только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС-индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга — такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все драйверы Purelogic R&D. Драйверы с подавлением резонанса — высококачественные устройства, и если бюджет позволяет, лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим: основная масса проданных драйверов не имеют компенсации резонанса. Тем не менее, десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Наличие защитных функций
Шестой аспект — наличие защитных функций. Среди них — защита от превышения питающего напряжения, тока обмоток (в т. ч. от короткого замыкания обмоток), переполюсовки питающего напряжения, неправильного подключения фаз шагового мотора. Чем больше таких функций, тем лучше.
Наличие микрошаговых режимов
Седьмой аспект — наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, чем больше деление при прочих равных условиях, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов. Так, для драйвера с входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ-контроллер, то 100 кГц, скорее всего, будет Вашим потолком, что соответствует делению 1/32.
Наличие дополнительных функций
Восьмой аспект — наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т. п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Качество драйвера
Девятый, и самый важный аспект — качество драйвера. Оно практически не связано с характеристиками и т. п. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как подавление резонанса, морфинг, а также воспользоваться проверенным способом — ориентироваться на бренды и качество технической поддержки.


Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях. В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага. На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.

На форуме периодически всплывают вопросы о драйверах шаговых двигателей и их настройке. Решил разобраться с этим делом для себя, возможно кому-нибудь также пригодится.
Для начала разновидности двигателей Nema17.
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
Nema17BH 42BHM(42BYG) - в архиве: Nema17 - (описание и параметры разновидностей ШД)
(здесь важен ток двигателя, для дальнейших расчетов).
А4988
Встречаются варианты разного цвета.
Поэтому нужно обращать внимание не на цвет, а на микросхему драйвера.
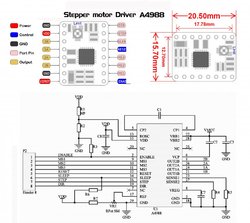
Схема и распиновка:
Назначение контактов драйвера A4988
ENABLE – включение/выключение драйвера
MS1, MS2, MS3 – контакты для установки микрошага
RESET - cброс микросхемы
STEP - генерация импульсов для движения двигателей (каждый импульс – шаг), можно регулировать скорость двигателя
DIR – установка направление вращения
VMOT – питание для двигателя (8 – 35 В)
GND – общий
2B, 2A, 1A, 1B – для подключения обмоток двигателя
VDD – питание микросхемы (3.5 –5В)
Значение микрошага устанавливается комбинацией сигналов на входах MS1, MS2, и MS3. Есть пять вариантов дробления шага.
MS1 MS1 MS1 Дробление шага
0 0 0 1
1 0 0 1/2
0 1 0 1/4
1 1 0 1/8
1 1 1 1/16
Для работы в режиме микрошага необходим слабый ток. На модуле A4988 поддерживает тока можно ограничить находящимся на плате потенциометром. Драйвер очень чувствителен к скачкам напряжения по питанию двигателя, поэтому производитель рекомендует устанавливать электролитический конденсатор большой емкости по питанию VMOT для сглаживания скачков. Внимание ! - Подключение или отключение шагового двигателя при включённом драйвере может вывести двигателя и драйвер из строя.
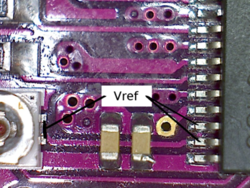
Настройка Vref для A4988
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов(Rs). Это два черных прямоугольника на плате драйвера. Обычно подписаны R050(номинал - 0.05 Ом) или R100 (номинал - 0.1 Ом).
Vref = Imax * 8 * (Rs)
Imax — ток двигателя;
Rs — сопротивление резистора. В моем случае Rs = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Исходя из этого, при длительной работе, на практике можно использовать коэффициент 0,6
Получается для Для 17HS4401, с током 1,7А Vref = 1,7 * 8 * 0,100*0,6=0,816 (0,82)
DRV8825
Плата создана на базе микросхемы компании TI (Texas Instruments Inc.) DRV8825 - биполярном шаговом драйвере двигателя. Расположение выводов и интерфейс модуля почти совпадает с драйвером шагового двигателя Pololu на микросхеме A4988, поэтому DRV8825 может стать высокопроизводительной заменой этой платы во многих приложениях.
Схема:
Характеристики:
шаг:1, 1/2, 1/4, 1/8, 1/16, 1/32.
Регулировка тока на обмотках двигателя, переменным резистором опорного напряжения.
Источника питания для двигателей от 8,2 В до 45 В.
Встроенный регулятор напряжения для логических цепей. Возможность подключения к логике как 3,3 В, так и 5 В.
Защита от перегрева (отключение при нагреве драйвера 150 градусов).
Защита по превышению тока обмоток.
Защита по пониженному напряжению.
Защита от короткого замыкания на землю.
При токе до 1,5 А на обмотку способен работать без радиаторов и дополнительного охлаждения.
Регулировку тока двигателя следует производить выставив переменным резистором опорное наряжение (на выводах 12,13 микросхемы или на "среднем контакте резистора") из расчета 1 к 2, т.е 0,5В соответствует 1А, напряжению 1В соответствует 2А.
Обратите внимание, что переходное отверстие (золотистое) на плате, возле выводов 12,13 не является контактом для проверки опорного напряжения, это линия питания двигателей.
Режим микрошага устанавливается путем подачи "1" на контакты MODE0, MODE1, MODE2. (В случае установки драйвера на RAMPS это перемычки MS1, MS2, MS3)
M0 M1 M2 Режим микрошага
не стоит не стоит не стоит полный
стоит не стоит не стоит 1/2
не стоит стоит не стоит 1/4
стоит стоит не стоит 1/8
не стоит не стоит стоит 1/16
стоит не стоит стоит 1/32
не стоит стоит стоит 1/32
стоит стоит стоит 1/32
DRV8825 расчет Vref
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Детальное описание драйверов А4988 и DRV8825 в архиве А4988_DRV8825.rar
Встречалась информация ,что по умолчанию на драйверах DRV8825 выставлен максимальный ток, поэтому регулировка перед началом работы обязательна:
"По умолчанию у красных A4988 опора стоит в 0.8V это 1A ничего плохого не случится, но у DRV8825 опора выставлена в 1.6V -это максимальный ток, в теории 3.2А, по документации DRV8825 рассчитан максимум на 2.5A(2.2А с обдувом), это может повредить, как двигатель, так и драйвер."
На форуме периодически всплывают вопросы о драйверах шаговых двигателей и их настройке. Решил разобраться с этим делом для себя, возможно кому-нибудь также пригодится.
Для начала разновидности двигателей Nema17.
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
Nema17BH 42BHM(42BYG) - в архиве: Nema17 - (описание и параметры разновидностей ШД)
(здесь важен ток двигателя, для дальнейших расчетов).
А4988
Встречаются варианты разного цвета.
Поэтому нужно обращать внимание не на цвет, а на микросхему драйвера.
Схема и распиновка:
Назначение контактов драйвера A4988
ENABLE – включение/выключение драйвера
MS1, MS2, MS3 – контакты для установки микрошага
RESET - cброс микросхемы
STEP - генерация импульсов для движения двигателей (каждый импульс – шаг), можно регулировать скорость двигателя
DIR – установка направление вращения
VMOT – питание для двигателя (8 – 35 В)
GND – общий
2B, 2A, 1A, 1B – для подключения обмоток двигателя
VDD – питание микросхемы (3.5 –5В)
Значение микрошага устанавливается комбинацией сигналов на входах MS1, MS2, и MS3. Есть пять вариантов дробления шага.
MS1 MS1 MS1 Дробление шага
0 0 0 1
1 0 0 1/2
0 1 0 1/4
1 1 0 1/8
1 1 1 1/16
Для работы в режиме микрошага необходим слабый ток. На модуле A4988 поддерживает тока можно ограничить находящимся на плате потенциометром. Драйвер очень чувствителен к скачкам напряжения по питанию двигателя, поэтому производитель рекомендует устанавливать электролитический конденсатор большой емкости по питанию VMOT для сглаживания скачков. Внимание ! - Подключение или отключение шагового двигателя при включённом драйвере может вывести двигателя и драйвер из строя.
Настройка Vref для A4988
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов(Rs). Это два черных прямоугольника на плате драйвера. Обычно подписаны R050(номинал - 0.05 Ом) или R100 (номинал - 0.1 Ом).
Vref = Imax * 8 * (Rs)
Imax — ток двигателя;
Rs — сопротивление резистора. В моем случае Rs = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Исходя из этого, при длительной работе, на практике можно использовать коэффициент 0,6
Получается для Для 17HS4401, с током 1,7А Vref = 1,7 * 8 * 0,100*0,6=0,816 (0,82)
DRV8825
Плата создана на базе микросхемы компании TI (Texas Instruments Inc.) DRV8825 - биполярном шаговом драйвере двигателя. Расположение выводов и интерфейс модуля почти совпадает с драйвером шагового двигателя Pololu на микросхеме A4988, поэтому DRV8825 может стать высокопроизводительной заменой этой платы во многих приложениях.
Схема:
Характеристики:
шаг:1, 1/2, 1/4, 1/8, 1/16, 1/32.
Регулировка тока на обмотках двигателя, переменным резистором опорного напряжения.
Источника питания для двигателей от 8,2 В до 45 В.
Встроенный регулятор напряжения для логических цепей. Возможность подключения к логике как 3,3 В, так и 5 В.
Защита от перегрева (отключение при нагреве драйвера 150 градусов).
Защита по превышению тока обмоток.
Защита по пониженному напряжению.
Защита от короткого замыкания на землю.
При токе до 1,5 А на обмотку способен работать без радиаторов и дополнительного охлаждения.
Регулировку тока двигателя следует производить выставив переменным резистором опорное наряжение (на выводах 12,13 микросхемы или на "среднем контакте резистора") из расчета 1 к 2, т.е 0,5В соответствует 1А, напряжению 1В соответствует 2А.
Обратите внимание, что переходное отверстие (золотистое) на плате, возле выводов 12,13 не является контактом для проверки опорного напряжения, это линия питания двигателей.
Режим микрошага устанавливается путем подачи "1" на контакты MODE0, MODE1, MODE2. (В случае установки драйвера на RAMPS это перемычки MS1, MS2, MS3)
M0 M1 M2 Режим микрошага
не стоит не стоит не стоит полный
стоит не стоит не стоит 1/2
не стоит стоит не стоит 1/4
стоит стоит не стоит 1/8
не стоит не стоит стоит 1/16
стоит не стоит стоит 1/32
не стоит стоит стоит 1/32
стоит стоит стоит 1/32
DRV8825 расчет Vref
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Детальное описание драйверов А4988 и DRV8825 в архиве А4988_DRV8825.rar
Встречалась информация ,что по умолчанию на драйверах DRV8825 выставлен максимальный ток, поэтому регулировка перед началом работы обязательна:
"По умолчанию у красных A4988 опора стоит в 0.8V это 1A ничего плохого не случится, но у DRV8825 опора выставлена в 1.6V -это максимальный ток, в теории 3.2А, по документации DRV8825 рассчитан максимум на 2.5A(2.2А с обдувом), это может повредить, как двигатель, так и драйвер."
Читайте также: