
Как выставить ток на драйвере a4988
Обновлено: 07.07.2024
Сегодня расскажу о драйвере A4988, данный драйвер подойдет тем, кто планирует создать свой собственный 3D-принтер или станок ЧПУ с управлением шаговым двигателям.
Технические параметры
► Напряжения питания: от 8 до 35 В
► Установка шага: 1, 1/2, 1/4, 1/8, 1/16
► Напряжение логики: 3 В или 5.5 В
► Защита от перегрева: Есть
► Максимальный ток на фазу: 1 А без радиатора, 2 А с радиатором.
► Габариты модуля: 20 мм х 15 мм х 10 мм
► Габариты радиатора: 9 мм х 5 мм х 9 мм
Общие сведения о драйвере A4988
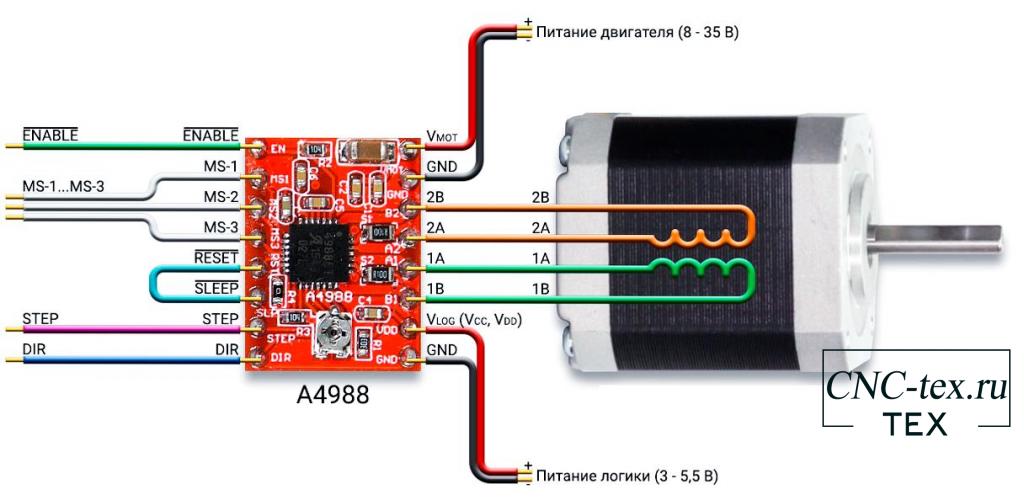
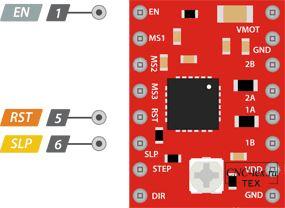
Распиновка драйвера A4988:
На драйвере A4988 расположено 16 контактов, назначение каждого можно посмотреть ниже:
Если не планируете использовать вывод RST необходимо подключить его к выводу SLP, чтобы подтянуть его к питанию, тем самым включить драйвер.
Настройка микрошага
Драйвер A4988 может работать микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровням. Например, если взять двигатель NEMA17 с шагом 1.8 или 200 оборотов, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот
Дня настройки микрошагов, драйвер A4988 имеет три выхода, а именно MS1, MS2 и MS3. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.
Вывода MS1, MS2 и MS3 в микросхеме A4988 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
Система охлаждения A4988
При интенсивной работе микросхемы A4988 начинает сильно греется и если температура превысит придельные значение, может сгореть. По документации A4988 может работать с током до 2 А на катушку, но на практике микросхема не греется если ток не превышает 1 А на катушку. Поэтому если ток выше 1 А необходимо устанавливать радиатор охлаждения, который идет в комплекте.
Настройка тока A4988
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Существует два способа настройки:
1. Замерить ток, для этого возьмем амперметр и подключим его в разрыв любой из обмоток (двигатель должен работать в полношаговом режиме), так же, при настройки ток должен составлять 70% от номинального тока двигателя.
2. Расчет значение напряжения Vref, согласно документации на A4988, есть формула I_TripMax = Vref / (8 × Rs), из которой мы можем получить формулу.
Vref = I_TripMax x 8 x Rs
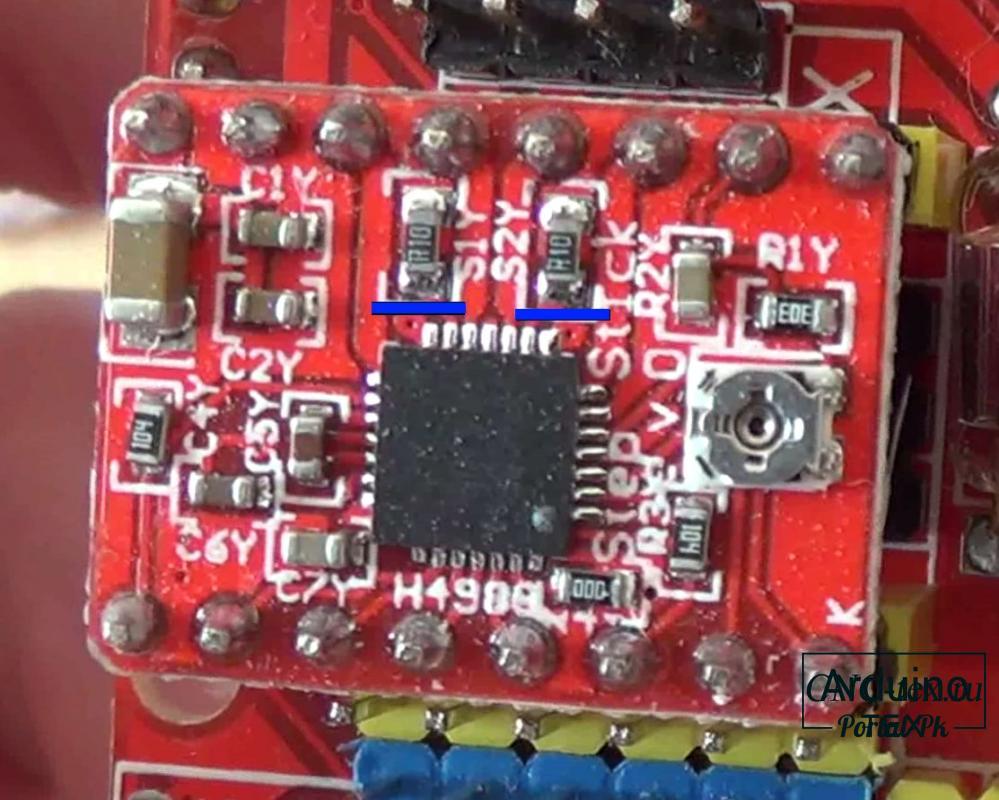
В моем случаи на драйвере A4988 установлены резисторы Rs = 0,100 Ом (R100), а номинальный ток двигателя 17HS4401 равняется 1,7 А.
Vref = 1,7 х 8 х 0,100 = 1,36 В
Мы рассчитали максимальное значение для двигателя 17HS4401, но при таком напряжение двигатель будет греться в режиме ожидания, необходимо уменьшить это значение на 70%, то есть:
Vref х 0,7 = 0,952 В
Осталось только настроить, берем отвертку и вольтметр, плюсовой шуп вольтметра устанавливаем на потенциометр, а шуп заземления на вывод GND и выставляем нужное значение.
Подключение драйвера шагового двигателя A4988 к Arduino UNO
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер шагового двигателя A4988 x 1 шт.
► Шаговый двигатель 17HS4401 x 1 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
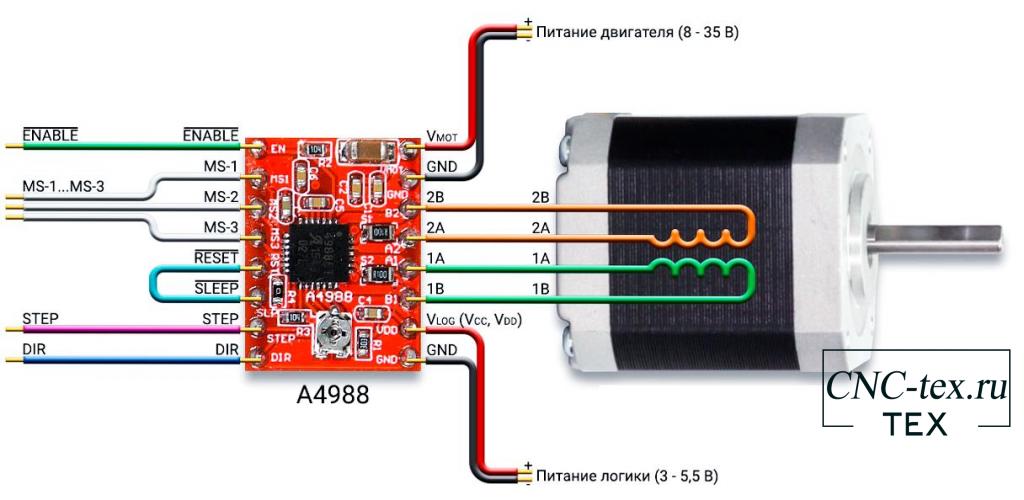
Подключение:
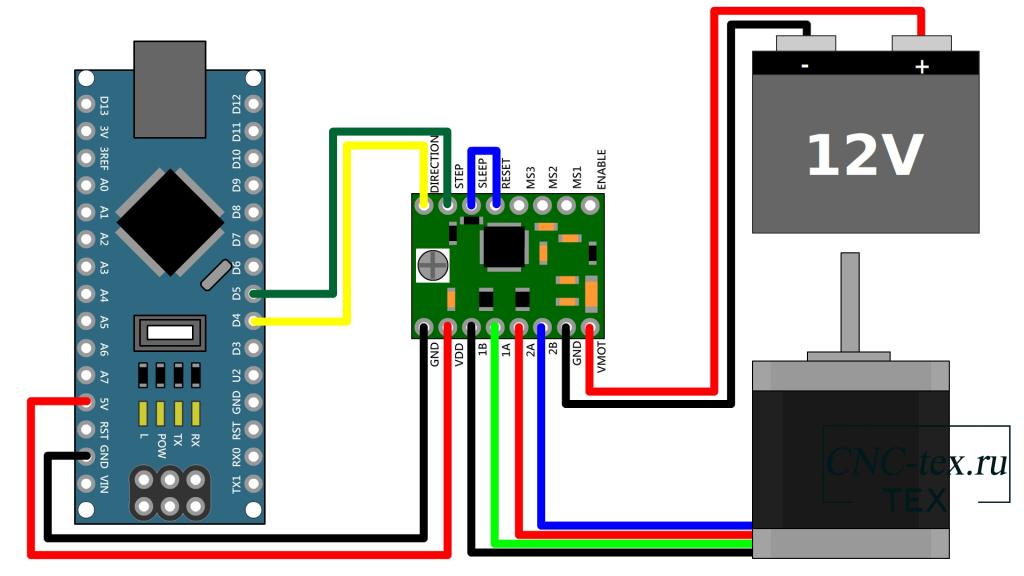
Теперь, можно приступить к сборке схемы. Первым делом, подключаем VDD и GND к 5 В и GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигатель к контактам 2B, 2A, 1A и 1B.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLEEP, чтобы включить драйвер. Так-же контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND, главное не забудьте подключить электролитический конденсатор на 100 мкФ, в противном случаи при скачке напряжение, модуль может выйти из строя.
Программа:
Теперь можно приступки к программной части и начать управлять шаговым двигателем с помощью драйвера A4988, загружайте данный скетч в Arduino.

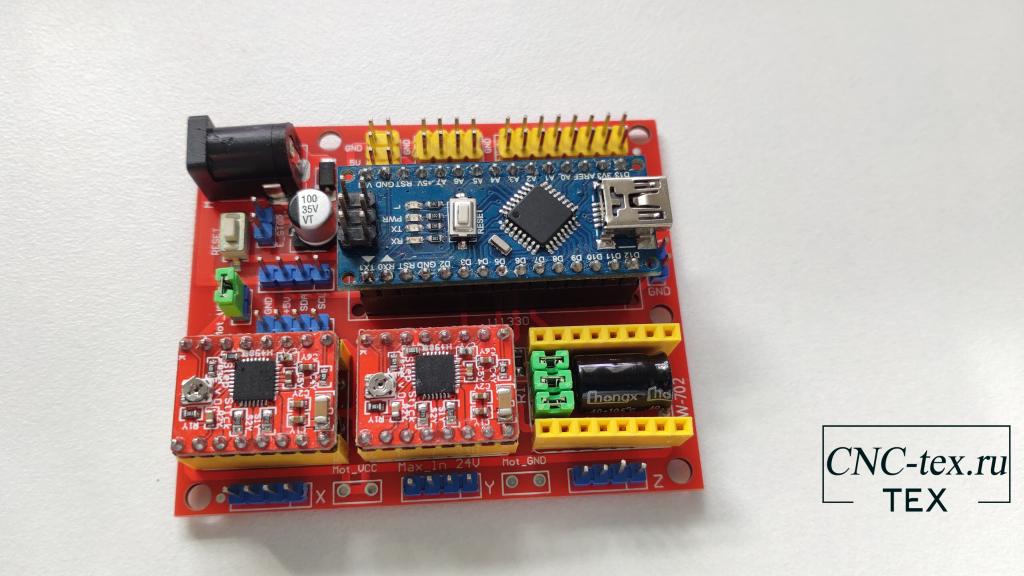
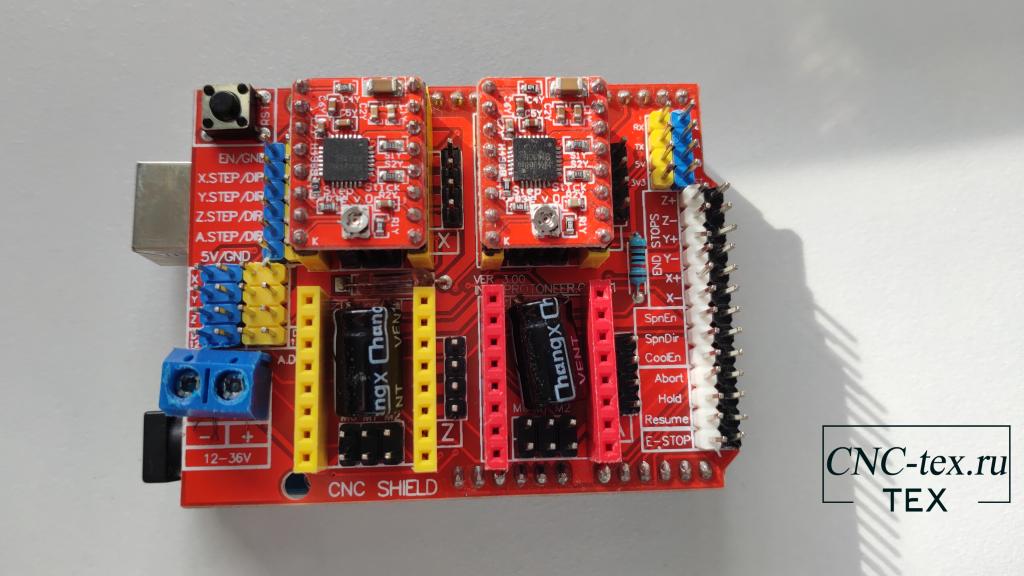
Продолжаю сборку станка ЧПУ. Шаговые двигателя я уже подобрал. Для проверки электроники, собрал тестовое подключение на столе.
Сперва я подключил к CNC shield v3 шаговые двигателя:
- 17HS4401 - ток 1,7A
- EM-181 - ток 1,2A
- EM-142- значение максимального тока не нашел.
Двигателя выбраны сейчас нам нужно настроить рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
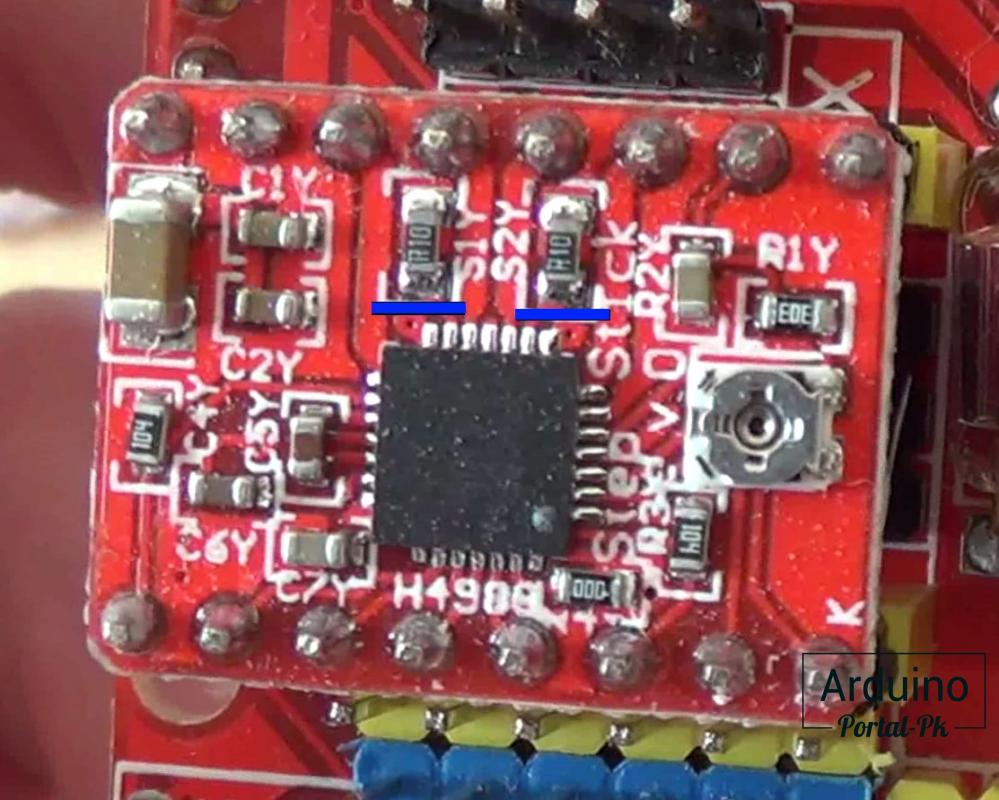
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Аналогично рассчитываю значения для EM-181
Vref = 1,2 * 8 * 0,100 = 0,96 В
Vrefист. = 0,96*0,7 = 0 ,672 В.
Так как я не смог найти datasheets для ЕМ-142. Для расчетов предложил, что ток на обмотку данного двигателя составляет 0,6 А. Если двигатель будит издавать гул сильнее обычного значит ток превышает максимальное значение. Его нужно понижать. Так как я взял ток обмотки. При расчете Vref ист. Не нужно умножать на 0,7, как я говорил выше ток одной обмотки составляет 70% от номинального. Расчет будет вот таким:
Vrefист. = 0,6 * 8 * 0,100 = 0,48 В.
По моим ощущениям я угадал с током двигателя ЕМ-142. Останется рассчитать сколько шагов он делает для совершения одного оборота. Об этом расскажу в следующей статье.
В видео подключил кнопки «Пауза», «Продолжить», «Аварийная остановка» . Подключил на пины шпинделя светодиод. И протестировал работу. Так же установил один конечный выключатель. Все работает. Если у вас возникли вопросу что куда подключается к CNC shield v3, читайте статью: Плата расширения для Arduino UNO, CNC shield v3 и драйверов A4988
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Драйвер шагового двигателя A4988 является электронным устройством, которое заставляет вращаться шаговый двигатель, путем совершение шагов. Данное устройство незаменимо при разработке высокоточных ЧПУ станков и 3D принтеров.
Применение драйвера для шагового двигателя A4988.
Для создания высокоточных станков используют шаговые двигатели, которые обладают рядом преимуществ перед коллекторными двигателями:
- Шаговый двигатель быстро стартует, останавливается и совершает реверс.
- Высокая точность перемещения и позиционирования.
- Позволяет позиционировать без применения обратной связи.
- Большой диапазон изменения скорости.
- Возможность обеспечивать низкую скорость вращения без применения редуктора.
Спектр применения шаговых двигателей очень большой. Вы пользуетесь офисной техникой и не подозреваете, что управляет вашим ксероксом, принтером, факсом, 3D принтером шаговые двигатели.
Управляет шаговым двигателем драйвер. Driver с английского языка «водитель». Одним из недорогих драйверов, и в связи с этим достаточно популярным, является драйвер A4988. Модуль A4988 имеет защиту от перегрузки и перегрева. Одним из параметров шаговых двигателей является количество шагов на один оборот 360°. Например, для шаговых двигателей Nema17 это 200 шагов на оборот, т.е 1 шаг равен 1.8°. Драйвер A4988 позволяет увеличить это значение за счёт возможности управления промежуточными шагами и имеет пять режимов микрошага (1(полный), 1/2, 1/4, 1/8 и 1/16).
Технические характеристики A4988.
Распиновка драйвера A4988.
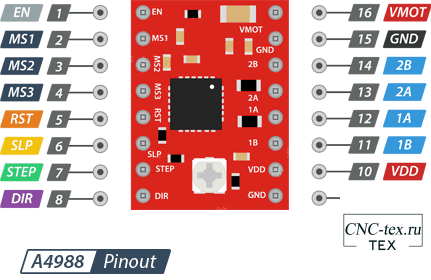
Драйвер A4988 имеет всего 16 контактов, которые позволяют управлять шаговыми двигателями. Распиновка у A4988 следующая:
Назначение контактов драйвера A4988.
- ENABLE – включение/выключение драйвера
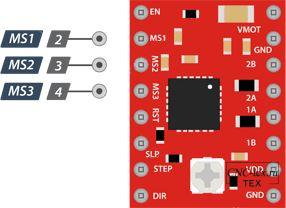
- MS1,MS2,MS3 – контакты для установки микрошага
- RESET - сброс микросхемы
- STEP - генерация импульсов для движения двигателей (каждый импульс – шаг), можно регулировать скорость двигателя
- DIR – установка направления вращения
- VMOT – питание для двигателя (8 – 35 В)
- GND – общий
- 2B, 2A, 1A, 1B – контакты для подключения обмоток двигателя
- VDD – напряжение питания микросхемы (3.5 –5В)
Выводы выбора микрошага.
Драйвер A4988 допускает использование режима микрошага. Это достигается за счет подачи питания на катушки с промежуточными уровнями тока.
Например, если вы решите управлять шаговым двигателем NEMA 17 с шагом 1,8 градуса (200 шагов на оборот) в режиме 1/4 шага, то двигатель будет выдавать 800 микрошагов на оборот.
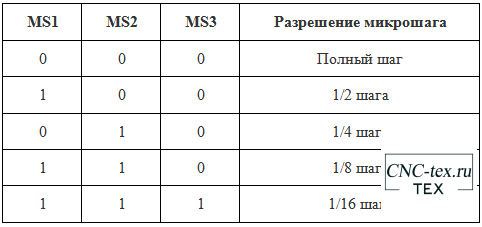
Драйвер A4988 имеет три вывода селектора размера шага (разрешения), а именно: MS1, MS2 и MS3. Установив соответствующие логические уровни на эти контакты, мы можем настроить двигатели на одно из пятиступенчатых разрешений.
Выводы выбора микрошага драйвер A4988.
По умолчанию эти три контакта подтянуты к земле внутренним резистором. Если мы оставим эти выводы не подключенными, то двигатель будет работать в режиме полного шага.
Выводы управления.
Драйвер A4988 имеет два управляющих вывода, а именно: STEP и DIR.
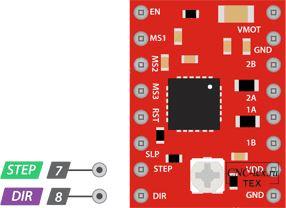
STEP — управляет микрошагом мотора. Каждыйвысокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращаться по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Выводы STEP и DIR не подтянуты внутренними резисторами, поэтому вы не должны оставлять их не подключенными.
Выводы управления питанием A4988.
A4988 имеет три различных вывода для управления состоянием питания, а именно. EN, RST и SLP.
EN — вывод включения (0)/ выключения (1) драйвера A4988. По умолчанию на этом выводе установлен низкий уровень, поэтому драйвер всегда включен.
SLP — подача на данный вывод сигнала низкого уровня переводит драйвер в спящий режим, сводя к минимуму потребление энергии. Вы можете использовать этодля экономии энергии.
RST — при подаче сигнала низкого уровня все входные данные STEP игнорируются, до тех пор, пока не будет установлен высокий уровень. Низкий уровень также сбрасывает драйвер, устанавливая внутренний транслятор в предопределенное состояние Home. Исходное состояние — это в основном начальное положение, с которого запускается двигатель, и оно различается в зависимости от разрешения микрошага.
Выводы для подключения шагового двигателя.
Выходные контакты: 1B, 1A, 2A и 2B.
К этим выводам можно подключить любой биполярный шаговый двигатель с напряжением питания от 8 до 35 В.
Каждый выходной контакт модуля может обеспечить ток до 2 А. Однако величина тока, подаваемого на двигатель, зависит от источника питания системы, системы охлаждения и настройки ограничения тока.
Система охлаждения — радиатор.
Чрезмерное рассеивание мощности микросхемы драйвера A4988 приводит к повышению температуры, которая может выйти за пределы возможностей микросхемы, что, вероятно, приведет к ее повреждению.
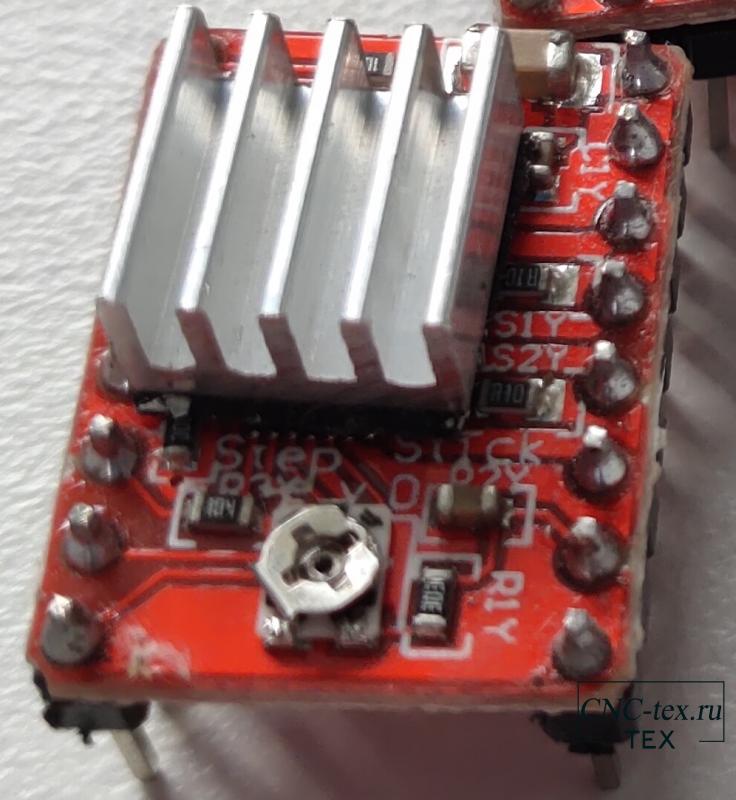
Даже если микросхема драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, микросхема может подавать только около 1 А на катушку без перегрева.
Для достижения более 1 А на катушку требуется радиатор или другой метод охлаждения.
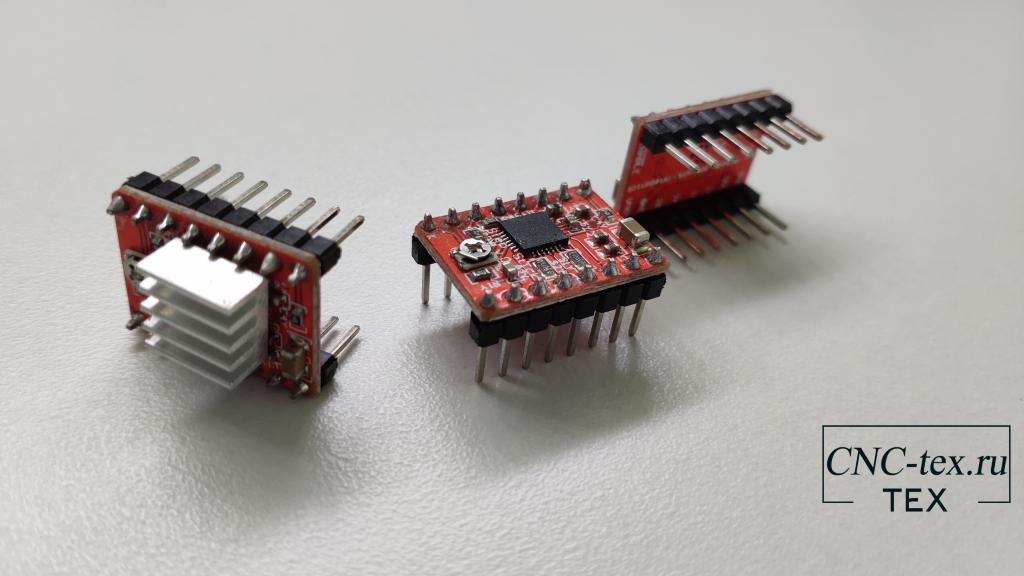
Драйвер A4988 обычно поставляется с радиатором. Желательно установить его перед использованием драйвера.
Ограничение тока.
Перед использованием драйвера нам нужно сделать небольшую настройку. Для этого нужно ограничить максимальный ток, протекающий через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.
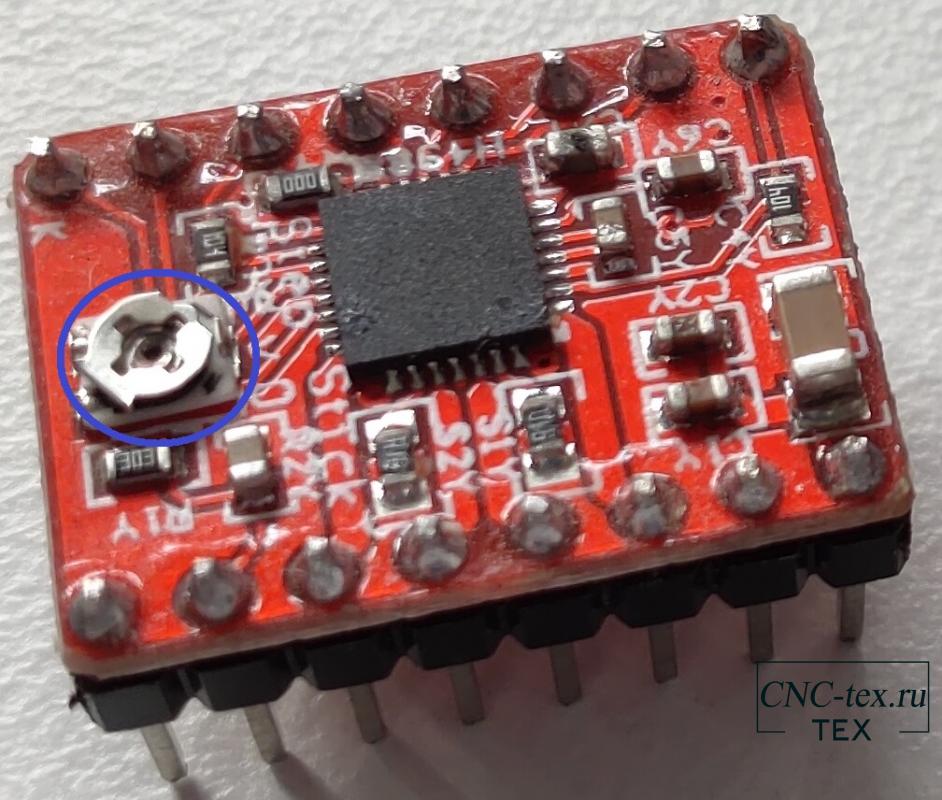
На драйвере A4988 есть небольшой потенциометр, который можно использовать для установки ограничения тока. Вы должны установить ограничение по току равным или ниже номинального тока двигателя.
Расчет и установка ограничещего тока драйвер шагового двигателя A4988.
В данном случае мы собираемся установить ограничение тока путем измерения напряжения (Vref) на выводе «ref».
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. Для примера расчета будем использовать NEMA 17 200 шагов/об, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP.
- Во время регулировки измерьте напряжение Vref (один щуп мультиметра на минус питания, а другой к металлическому корпусу потенциометра).
- Отрегулируйте напряжение Vref по формуле:
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
- Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Vref = 1,2 * 8 * 0,100 = 0,96 В
Vrefист. = 0,96*0,7 = 0 ,672 В.
Электроника для ЧПУ станков, в которой можно использовать драйвер шагового двигателя A4988.
Драйвер шагового двигателя A4988 можно подключить к микроконтроллеру, например к Arduino, напрямую.
Скетч вращения шагового двигателя NEMA 17, драйвер A4988.
Программа для вращения шагового двигателя NEMA 17, драйвер A4988. Сначала мотор совершает полный оборот в одну сторону, потом в другую.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.
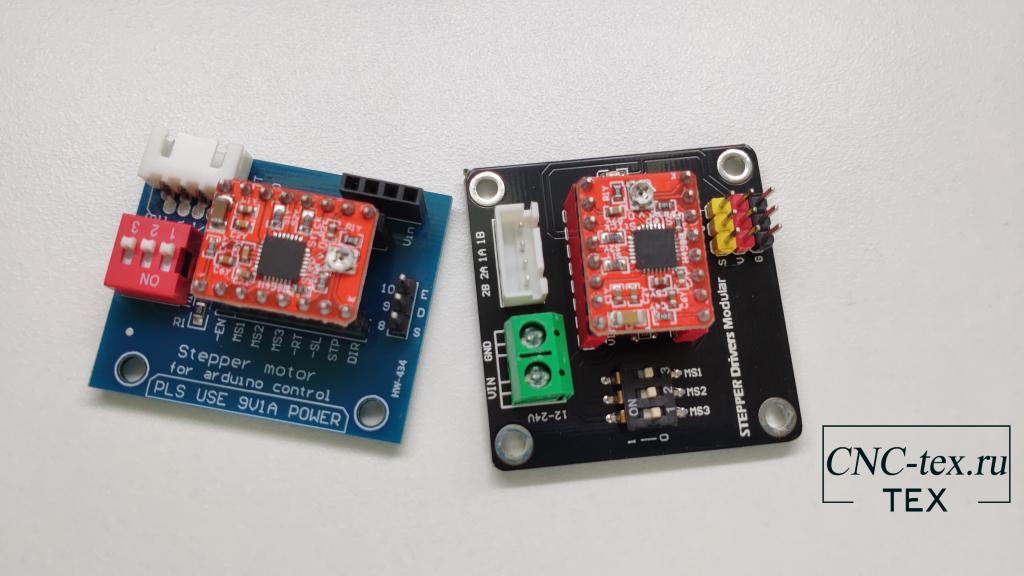
Распиновку и как подключать модуль драйвера A4988 будем рассматривать в следующей статье.
Использование драйвера A4988 с CNC shield v3 и CNC shield v4.
Драйвер A4988 можно установить на CNC shield v3 и CNC shield v4. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
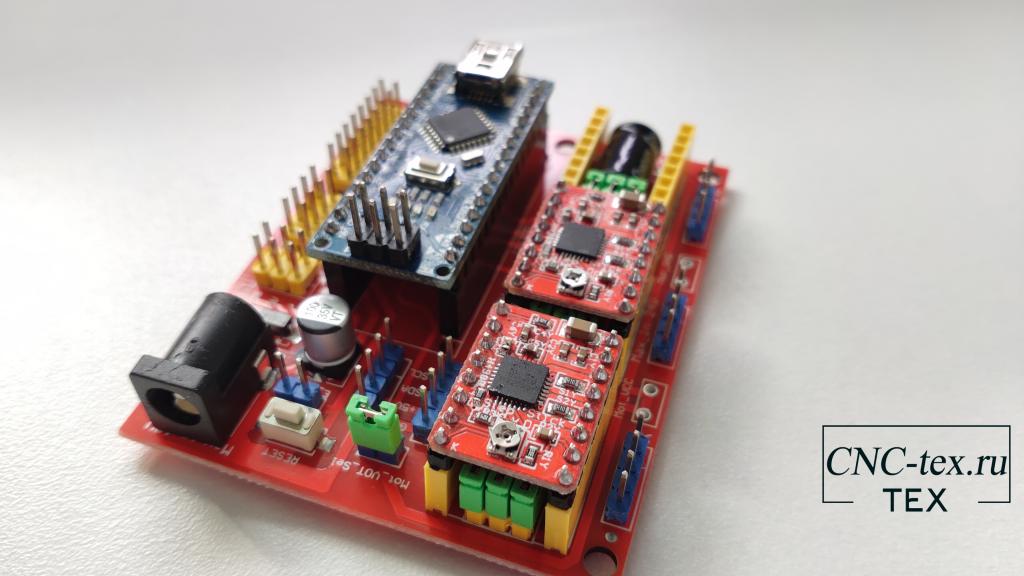
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки.
Более подробно CNC shield v3 и CNC shield v4 будем рассматривать в следующих статьях.
Мы еще не рассмотрели использование данных драйверов для создания 3D принтеров на основе Ramps. Но это совсем другая история.
Вывод можно сделать следующий. Не смотря на свою небольшую стоимость и небольшой размер, драйвера отлично подходят для реализации большого количества проектов. От самодельных станков, до роботов манипуляторов.
Понравился Драйвер шагового двигателя A4988? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Как Вам вариант экономии проводов к экструдеру?
Соратники, заморочился по поводу подключения каретки экструдера к электроники. Сейчас у меня от электроники к каретке 15 проводков:Мотор - 4Нагревател.Нужен совет ABS печатал нормально, поменял на другой бренд и не могу настроить - загибаются края и все тут :(
Все было хорошо и отпечал свою первую катушку АБСа без проблем вообще на cr-10 max c большим столом и без термокамеры. П.
Шестерня vs зубчатое колесо
Часто участникам портала приходится изготавливать зубчатые колеса и шестерни. Но мало кто задается вопросом, в чем их отличие?
Читайте в блогах
Новогодняя тигра 2022
Колокольчик на елку.
Тест и сравнение трёх 3D принтеров: Voxelab Aquila • Anycubic Vyper • Creality Ender 3 V2
Канцелярия.
Индеец семинол
Не все так грустно!
Популярные
3D-принтеры
Комментарии и вопросы
Здравствуйте! Дело в том, что.
Здравствуйте! Нет, просто темп.
Пожалуйста, не распространяйте.
Добрый вечер. Не подскажете -.
По сути вопрос именно к знаток.
Приветствую.Печатаю на Sapphir.
При печати происходит (возможн.
СООБЩЕСТВО
РАЗДЕЛЫ
СОЦСЕТИ



Пароль успешно изменен
На ваш e-mail высланы новые регистрационные данные.

Пожалуйста, проверьте Вашу почту
Вам было отправлено письмо с инструкцией по восстановлению пароля. Если вы не получили письмо в течение 5 минут, проверьте папку спам, попробуйте еще раз.
Читайте также: