
Как запустить серводвигатель без драйвера
Обновлено: 07.07.2024
Привет Хабровчане!
Решил я рассказать «всему свету» о проблеме, с которой столкнулся при постройке своего проекта, и как мне удалось её решить.
А речь сегодня пойдет о бесколлекторных двигателях, о регуляторах хода и как ими управлять.
Что же такое бесколлекторный двигатель, я не буду долго расписывать (сами можете посмотреть Wiki), а скажу в 2х словах, это 3х фазный двигатель постоянного тока.

И приводится в движение сие чудо благодаря специальному регулятору, который последовательно переключает обмотки с определенной частотой.
Управляя частотой переключения обмоток мы управляем скоростью вращения ротора.
Ну что же, надеюсь тут все понято, идем дальше.
Первые проблемы
Были закуплены 2 комплекта двигатель + регулятор, ждал около месяца, пришли.
Мною овладел приступ безудержного веселья по этому поводу, но, к сожалению, это было ненадолго….
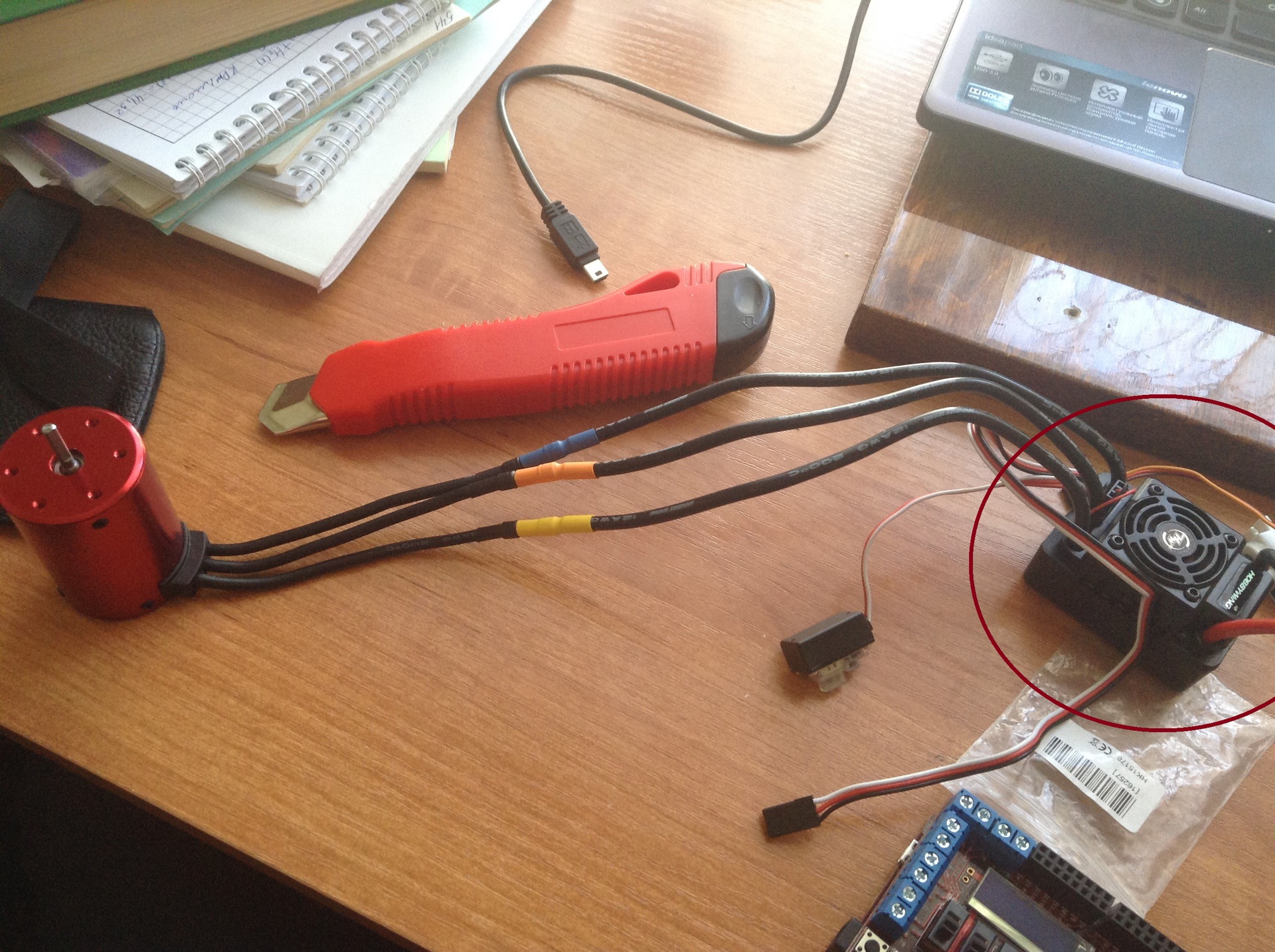
Рассмотрев эти чудеса техники я решил подключить их к источнику питания, и тут то первое разочарование, тихий хлопок (как от КЗ) и тишина, светодиоды не горят, писка нет (а он должен быть), только крутится кулер на регуле, беда…
Побежал в ближайший Хобби магазин, и добрый консультант вынес вердикт: сгорел!
Со вторым такая же история, в общем ребята, не повезло, оба бракованные…
Ну хоть кошечка порадовалась:

Пришлось раскошелиться и купить у них регулятор по цене обоих комплектов (поджимали сроки).
Купил, подключил, все пищит, горит, работает, прям аж душа радуется! (на фото он выделен):
Проблема номер два
Теперь настала пора покрутить двигателем.
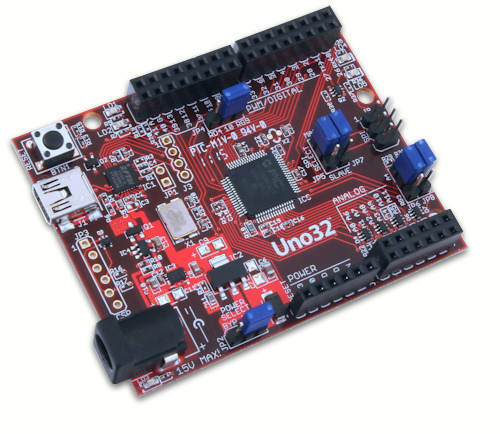
А покрутить нужно не с сервотестера или аппы радиоуправления, а с микроконтроллера, а точнее вот с такой платки:
Залил, ноль эмоций…
Бился 2 дня, пока не наткнулся на случайный пост, о том, что у регулятора есть защита, и он начинает функционировать только при подаче на его вход ШИМ сигнала 1,5 мс.
Окей, будет сделано.
Дальше я подцепил обыкновенный резистор через АЦП, и опытным путем подобрал крайние значения ШИМ регулятора.
Код получившийся в итоге:
И все заработало.
Теперь все крутиться, шумит, пищит и просто радует.
P.S. Это код для управления сразу 2мя двигателями.
И последняя проблема, питание…
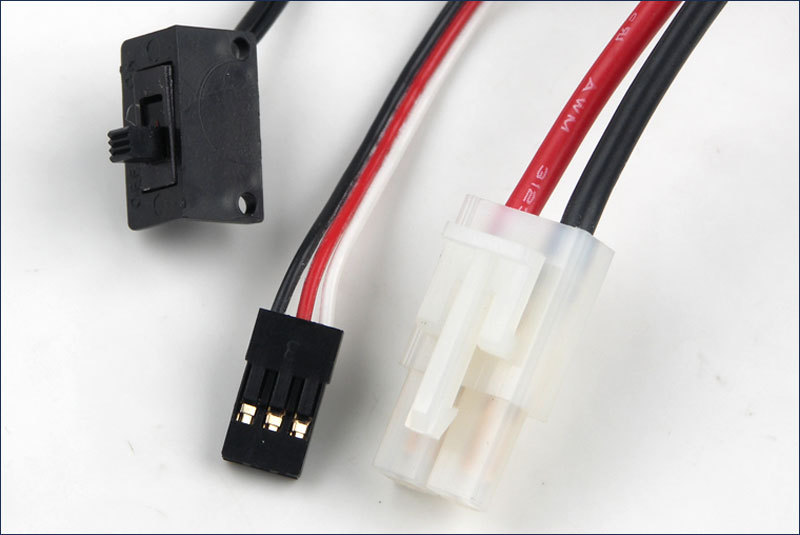
Здесь расскажу немного, а именно, от регулятора идет 3 провода:
Центральная колодка, по порядку Черный — минус, Красный — плюс и Белый — провод управления.
И загвоздка в том, что в отличие от сервоприводов, это не входы под питание, а выходы, т.е. питаемся от них.
К чему я это, да к тому, что подключив регулятор как серву, я чуть не спалил порты на ноутбуке, ибо плата в это время была запитана от USB.
Но к счастью у моего старичка сработала защита и все обошлось перезагрузкой…
Спасибо большое за внимание.
Надеюсь мой опыт будет полезен для вас.
До скорых встреч.
Познакомимся поближе с сервоприводами. Рассмотрим их разновидности, предназначение, подсказки по подключению и управлению.

Что такое сервопривод?
Сервопривод — это мотор с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервомотором является любой тип механического привода, имеющий в составе датчик положения и плату управления.
Простыми словами, сервопривод — это механизм с электромотором, который может поворачиваться в заданный угол и удерживать текущее положение.
Элементы сервопривода
Рассмотрим составные части сервопривода.

Электромотор с редуктором
За преобразование электричества в механический поворот в сервоприводе отвечает электромотор. В асинхронных сервоприводах установлен коллекторный мотор, а в синхронных — бесколлекторный.
Однако зачастую скорость вращения мотора слишком большая для практического использования, а крутящий момент — наоборот слишком слабый. Для решения двух проблем используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, вращается выходной вал — конечная шестерня редуктора, к которой можно прикрепить нечто, чем мы хотим управлять.
Позиционер
Для контроля положения вала, на сервоприводе установлен датчик обратной связи, например потенциометр или энкодер. Позиционер преобразует угол поворота вала обратно в электрический сигнал.
Плата управления
За всю обработку данных в сервоприводе отвечает плата управления, которая сравнивает внешнее значения с микроконтроллера со показателем датчика обратной связи, и по результату соответственно включает или выключает мотор.
Выходной вал

Вал — это часть редуктора, которая выведена за пределы корпуса мотора и непосредственно приводиться в движение при подаче управляющих сигналов на сервопривод. В комплектации сервомоторов идут качельки разных формфакторов, которые одеваются на вал сервопривода для дальнейшей коммуникации с вашими задумками. Не рекомендуем прилагать к валу нагрузки, которые больше крутящего момента сервопривода. Это может привести к разрушению редуктора.
Выходной шлейф
Для работы сервопривода его необходимо подключить к источнику питания и к управляющей плате. Для коммуникации от сервопривода выходит шлейф из трёх проводов:
Красный — питание сервомотора. Подключите к плюсовому контакту источнику питания. Значения напряжение смотрите в характеристиках конкретно вашего сервопривода. Чёрный — земля. Подключите к минусовому контакту источника питания и земле микроконтроллера. Жёлтый — управляющий сигнал. Подключите к цифровому пину микроконтроллера.Если сервопривод питается напряжением от 5 вольт и потребляет ток менее 500 мА, то есть возможность обойтись без внешнего источника питания и подключить провод питания сервомотора непосредственно к питанию микроконтроллера.
Управление сервоприводом
Алгоритм работы
Сервопривод получает на вход управляющие импульсы, которые содержат: Для сервоприводов постоянного вращения: значения скорости и направления вращения. Плата управления сравнивает это значение с показанием на датчике обратной связи. На основе результата сравнения привод производит некоторое действие: например, поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра.Интерфейс управления
Чтобы указать сервоприводу желаемое состояние, по сигнальному проводу необходимо посылать управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал от микроконтроллера поступает в управляющую схему сервопривода, имеющийся в нём генератор импульсов производит свой импульс, длительность которого определяется через датчик обратной связи. Далее схема сравнивает длительность двух импульсов:
Если длительность разная, включается электромотор с направлением вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.Для управления хобби-сервоприводами подают импульсы с частотой 50 Гц, т.е. период равен 20 мс:
1540 мкс означает, что сервопривод должен занять среднее положение.Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
Часто способ управления сервоприводами называют PWM (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation) в котором важна длина импульсов, а не частота.
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.

Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.

Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
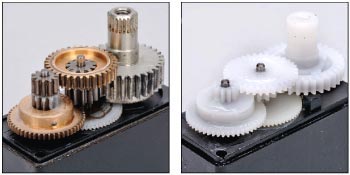
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
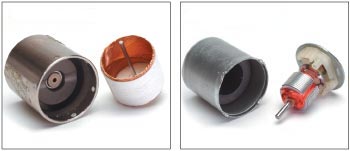
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
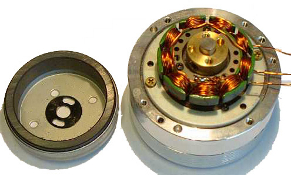
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2 . Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту 5V или напрямую к источнику питания жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo .
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.

Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
По аналогии подключим 2 сервопривода
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
Примеры работы с Espruino
Примеры работы с Raspberry Pi
Вывод
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
Используйте драйвер сервомоторов Multiservo Shield v2 для управления до 18 сервомашинками одновременно, на базе которых вы можете создавать гексаподов, роботов манипуляторов и других моторизованных устройств.

Предыдущие версии
Первая ревизия модуля

Multiservo Shield v1. Отличие v1 и v2:
В версии v2 присутствует защита от переполюсовки по питанию через силовой клеммник. В версии v2 распаяна электронная обвязка для считывания показаний силового питания и потребляемого тока.Примеры работы для Arduino
В качестве мозга для работы с Multiservo Shield v2 рассмотрим платформы из семейства Arduino, например Uno.
Подключение и настройка
Аппаратная часть
На низком уровне драйвер сервоприводов общается с управляющей электроникой по интерфейсу I²C.
Подробнее про I²C в Arduino




Программная часть
На этом установка закончена, теперь смело переходите к экспериментам.
Управление одним сервоприводом
Рассмотрим базовый пример — подключим один сервопривод к 7 пину Multiservo Shield и заставим его плавно вращаться от 0 до 180 градусов.
Схема устройства

Код для Arduino IDE
После прошивки устройства вал мотора будет плавно перемещаться от 0 до 180 градусов и так по кругу.
Управление 18 сервоприводами
Выжмем максимум из драйвера — подключим 18 сервоприводов к пинам 0–17 Multiservo Shield и заставим их плавно по очереди вращаться от 0 до 180 градусов.
Схема устройства

Код для Arduino IDE
После прошивки устройства вал каждого мотора будет плавно по очереди перемещаться от 0 до 180 градусов и так по кругу.
Servo и Multiservo
А теперь рассмотрим симбиоз — подключим один сервопривод к 7 пину Multiservo Shield, а второй к 7 пину платформы Aeduino Uno. А затем заставим их плавно вращаться от 0 до 180 градусов.
Если запутались в подключении, смотрите подробности в распиновке платы.
Схема устройства

Код для Arduino IDE
После прошивки устройства сначала вал одного мотора будет плавно перемещаться от 0 до 180 градусов, а затем вал другого мотора от 0 до 180 градусов и так по кругу.
Примеры работы для Espruino
В качестве мозга для работы с Multiservo Shield v2 рассмотрим платформы из семейства Espruino, например Iskra JS.
Подключение и настройка
Аппаратная часть
На низком уровне драйвер сервоприводов общается с управляющей электроникой по интерфейсу I²C.
Подробнее про I²C в Espruino




Программная часть
На этом установка закончена, теперь смело переходите к экспериментам.
Управление одним сервоприводом
Рассмотрим базовый пример — подключим один сервопривод к 7 пину Multiservo Shield и заставим его плавно вращаться от 0 до 180 градусов.
Схема устройства
Код для Iska JS
После прошивки устройства вал мотора будет плавно перемещаться от 0 до 180 градусов и так по кругу.
Элементы платы

Микроконтроллер ATmega48PA
Плата Multiservo Shield выполнена на микроконтроллере ATmega48PA с прошивкой управления сервоприводами от Амперки. Чип принимает команды по I²C интерфейсу от внешней управляющей платы, например Arduino Uno или Iskra JS, и рулит до 18 сервоприводами в одно время.
Силовой клеммник питания
Для питания сервомоторов используйте клеммник под винт PWR IN .
| Силовой клеммник | Подключение |
|---|---|
| PWR + | Силовое питание |
| PWR − | Земля |
Диапазон входного напряжение должен соответствовать рабочему напряжению подключаемых сервоприводов, т.е. сколько приложили на силовой клеммник, столько и поступит на линию питания моторов. Номинальное напряжения большинства хобби сервоприводов не выходит за рамки диапазона от 5 до 12 вольт.
В качестве источника питания рекомендуем взять:


Контуры питания
На плате расширения MultiServo Shield присутствует два контура питания.
Силовой контур Vs. Напряжение питания сервомоторов, которое поступает от силового клеммника. Диапазон входного напряжение должен соответствовать номинальному питанию моторов, а суммарный максимальный ток потребления не должен превышать 10 А.Если отсутствует хотя бы один из контуров питания Vs или Vss — Multiservo Shield работать не будет. Для информации о текущем состоянии каждого контура используйте светодиодную индикацию.
Джаммер объединения питания

На плате расширения MultiServo Shield присутствует два контура напряжения, т.е. для работы схемы необходимо два источника напряжения.

При установки джампера в положение PWR JOIN , происходит объединение положительного контакта + силового клеммника PWR IN с пином Vin управляющей платформы. Режим объединённого питания позволяет запитывать всё устройство от одного источника напряжения.
Выбор питания
При объединённом режиме PWR JOIN , напряжение на устройство может быть подано двумя способами:
Правила
При объединённом режиме PWR JOIN , важно знать:
При работе двигателей по цепи питания может проходить большой ток, на который цепь Vin управляющей платформы может быть не рассчитана. Поэтому выбор питания через силовой клеммник PWR IN предпочтительнее. Источник питания должен быть способен обеспечить стабильное напряжение при резких скачках нагрузки. Даже кратковременная просадка напряжения может привести к перезагрузке управляющей платформы. В итоге программа начнётся сначала и поведения двигателей будет неадекватным.Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| Vs / PON | Индикатор подачи силового питания. Горит — напряжение есть, не горит — напряжение нет. |
| Vss / ųON | Индикатор подачи цифрового питания. Горит — напряжение есть, не горит — напряжение нет. |
Troyka-контакты подключения сервоприводов
Сервоприводы подключаются к плата Multiservo Shield через контактные штыри S-V-G , где:
V — питание сервомоторов. Берется от силового клеммника.На линии V будет присутствовать не логическое питание платформы 3,3 / 5 В, а напряжение Vs приложенное к силовому клеммнику.
Troyka-контакты ввода-вывода общего назначения
На плате доступны шесть Troyka-контактов ввода-вывода внешнего контролера, которые можно задействовать в дополнение к основным. Контакты пронумерована S-V-G , где:
На линии V будет присутствовать не логическое питание платформы 3,3 / 5 В, а напряжение Vs приложенное к силовому клеммнику.
ICSP-разъём ATmega48PA
На плате расположен ICSP-разъём, который предназначен для загрузки прошивки в микроконтроллер ATmega48PA через внешний программатор. В нашем случае — это мост, который получает команды по I²C и рулит 18 сервоприводами.
Контакты Arduino Shiled R3
Плата Multiservo Shield выполнена в форм-факторе Arduino Shield R3. а это значит расширение просто одевается сверху на управляющую платформу форм-фактора Arduino R3 методом бутерброда без дополнительных проводов и пайки. В итоге вам остаются доступны все физические контакты вашего контроллера для дальнейшего использования.
В этой статье мы поговорим о сервоприводах в проектах Ардуино. Именно благодаря серводвигателям обычные электронные проекты становятся робототехническими. Подключение серво к Arduino проекту позволяет реагировать на сигналы датчиков каким-то точным движением, например, открыть дверцу или повернуть в нужную сторону сенсоры. В статье рассмотрены вопросы управления сервоприводами, возможные схемы подключения серво к ардуино, а также примеры скетчей.
Сервопривод для Ардуино

Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
В проектах ардуино робототехники серво часто используется для простейших механических действий:
- Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота.
- Сделать небольшой шаг ногой, движение конечностью или головой.
- Для создания роботов-манипуляторов.
- Для реализации механизма рулевого управления.
- Открыть или закрыть дверку, заслонку или другой предмет.
Конечно, сфера применения серво в реальных проектах гораздо шире, но приведенные примеры являются самыми популярными схемами.
Схема и типы сервоприводов


Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни. В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.

Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Где купить популярные серво SG90, MG995, MG996
Управление сервоприводом

Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Когда сигнал попадает в управляющую схему, генератор подает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы происходит сравнение длительности поданного сигнала и сигнала с генератора. Если эти сигналы разные по длительности, включается электромотор, направление вращения которого определяется тем, какой из импульсов короче. При равенстве длины импульсов мотор останавливается.

Важно учитывать, что на конкретном устройстве настройки могут несколько отличаться от общепринятых значений. У некоторых устройств среднее положение и ширина импульса может быть равной 760 мкс. Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства.
Способ управления приводом часто по ошибке называют PWM/ШИМ, но это не совсем корректно. Управление напрямую зависит именно от длины импульса, частота их появления не так важна. Корректная работа будет обеспечена как при 40 Гц, так и при 60 Гц, вклад внесет только сильное уменьшение или увеличение частоты. При резком спаде сервопривод начнет работать рывками, при завышении частоты выше 100 Гц устройство может перегреться. Поэтому правильнее называть PDM.
По внутреннему интерфейсу можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет – все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой – микропроцессор, принимающий и анализирующий импульсы.

При получении сигнала аналоговый сервопривод принимает решение, менять или нет положение, и по необходимости подает на мотор сигнал с частотой 50 Гц. За время реакции (20 мс) могут произойти внешние воздействия, которые изменят положение сервопривода, и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с большей частотой – от 200 Гц, поэтому он может быстрее отреагировать на внешние воздействия, быстрее развивать нужную скорость и крутящий момент. Следовательно, цифровой сервопривод будет лучше удерживать заданное положение. При этом для работы цифрового сервопривода требуется больше электроэнергии, что повышает их стоимость. Большой вклад в цену делает и сложность их производства. Высокая стоимость – единственный недостаток цифровых сервоприводов, в техническом плане они намного лучше аналоговых устройств.
Подключение серводвигателя к ардуино

Скетч для управления сервоприводом в Arduino
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
Скетч для двух сервпоприводов
А в этом примере мы работаем сразу с двумя сервоприводами:
Управление сервоприводом с помощью потенциометра
В этом примере поворачиваем серво в зависимости от значения, полученное от потенциометра. Считываем значение и преобразовываем его в угол с помощи функции map:
Сервопривод SG90

Характеристики и подключение SG-90
Если вы собрались купить самый дешевый и простой сервопривод, то SG 90 будет лушим вариантом Этот серво чаще всего используется в управлении небольшими легкими механизмами с углом поворота от 0° до 180°.
Технические характеристики SG90:
- Скорость отработки команды 0,12с/60 градусов;
- Питание 4,8В;
- Рабочие температуры от -30С до 60 С;
- Размеры 3,2 х 1,2 х 3 см;
- Вес 9 г.
Описание SG90
Цвета проводов стандартные. Сервопривод стоит недорого, он не обеспечивает точных настроек начальных и конечных позиций. Для того, чтобы избежать лишних перегрузок и характерного треска в положении 0 и 180 градусов лучше выставлять крайние точки в 10° и 170°. При работе устройства важно следить за напряжением питания. При сильном завышении этого показателя могут повредиться механические элементы зубчатых механизмов.
Сервоприводы MG995 и MG996 tower pro
Серво MG995 является второй по популярности моделью сервоприводов, чаще всего подключаемых к проектам Arduino. Это относительно недорогие сервомоторы, обладающие гораздо лучшими характеристиками по сравнению с SG90.
Характеристики MG995
Выходной вал у MG995 поворачивается на 120 градусов (по 60 в каждом направлении), хотя многие продавцы указывают на 180 градусов. Устройство выполняется в пластиковом корпусе.
- Вес 55 г;
- Крутящий момент 8,5 кг х см;
- Скорость 0,2с/60 градусов (при 4,8В);
- Рабочее питание 4,8 – 7,2В;
- Рабочие температуры – от 0С до -55С.
Описание MG995
Подключение к ардуино также происходит по трем проводам. В принципе, для любительских проектов допускается подключение MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому рекомендуется все-таки запитывать серво отдельно, не забыв соединить землю обоих контуров питания. Другим упрощающим жизнь вариантом будет использование готовых сервоконтроллеров и шилдов, обзор которых мы подготовим в отдельной статье.
MG996R похож на MG995 по своим характеристикам, только он выполняется в металлическом корпусе.
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения. При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов.
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Заключение
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.
Читайте также: