
Какие драйвера выбрать для nema 23
Обновлено: 03.07.2024
Всем привет решил создать такую тему думаю будет полезна хотелось чтоб здесь писали о драйверах кто сам какими пользуется и свои отзывы также конечно можно задавть вопросы. Купил себе драйвера HY-DIV268N-5A и хочу написать о них драйвера неплохие на микросхеме Toshiba tb6600hg. У китайцев заявлено на сайте что можно подавать 50в но не делайте это максимум 42в я подал 46в планировал поднять до 48 и когда гонял станок проверял и настраивал то драйвера пустили дымок. Я их разобрал микросхема сгорела также диоды от ОЭДС были пробиты они на 2А 400в. Эти драйвера подходят для нема 17 и нема 23 двигателей очень хорошо. Думаю это пригодится на нашем форуме кто будет строить станок или обнавлять свой старый то эта информация пригодится. И если у кого другие есть драйвера то пишите свои отзывы чтоб люди знали что стоит покупать а что нет.
2 Ответ от nachkar1978 2017-05-02 06:57:15
3 Ответ от Роман_Удмурт 2017-05-05 20:54:41 (изменено: Роман_Удмурт, 2017-05-05 21:00:51)
Действительно, "чисто для ознакомления, набора опыта и в топку", как выше изложил nachkar1978.
ВНИМАНИЕ! Из личного опыта и практики 3 года с оборудованием завода Twitte Готовые система ЧПУ на основе контроллера TuxWay ПРОБЛЕМ НЕ БЫЛО НИ РАЗУ.

Конечно, не забываем очищать внутренние элементы от древесной пыли. Этот БП с материнкой и драйверами и контроллерами у меня находится в гаражном помещении, круглый год, и при повышенной влажности, и разные паучки в нем ползают - но ведь пашет иногда сутками и по сей день. а нареканий нет вообще.
4 Ответ от Sem 2017-11-16 10:25:21
Для синхронной работы двух ШД по одной оси нужно подключать к одному драйверу паралельно оба ШД увеличив соответственно ток на драйвере в два раза, или необходимо подключать два драйвера к одному выходу контроллера?
5 Ответ от maksim.mixeew2017 2017-11-16 10:38:20
два шд,два драйвера.
6 Ответ от Sem 2017-11-16 12:36:15
Объясните почему?
Просто сам я инженер по электроприводам, но с данными драйверами не встречался, по теории чтобы два двигателя работали синхронно их подключают к одному блоку электропривода, увеличив нагрузочную способность электропривода в одну цепь, иначе при выходе из строя одного элемента, систему переклинет, что приведет к серьезным авариям, как минимум выведет рабочий двигатель и драйвер в режим короткого замыкания.
Повторюсь с современными системами не работал, и эти драйвера не видел, может за 20 лет все поменялось, сейчас современными учёными доказано что и Земля плоская.
7 Ответ от maksim.mixeew2017 2017-11-16 12:46:09
Следует придерживаться правила - для одного ШД нужен один драйвер. Если нужно чтобы 2 ШД вращались (шагали) синхронно - нужно взять два драйвера, подключить к каждому драйверу свой шаговый двигатель и у драйверов объединить сигналы STEP/DIR/ENABLE. Сигналы STEP/DIR/ENABLE будут подаваться синхронно на оба драйвера и ШД будут шагать одновременно. Нельзя к одному драйверу подключить 2 шд,это выведет его из строя.Конечно можно их запаралелить и поднять напругу,но это нагрузка на драйвер и сработает только с биполярниками. Подключать два шд к одному STEP тоже не рекомендуется,так как при подклинивании одного из них,пойдет перекос портала который нужно выправлять в ручную.
8 Ответ от Sem 2017-11-16 13:26:50
Наверное вы описались, т.к. при паралельном подключении напряжение сохраняется, а увеличивается нагрузка в виде тока на выходе драйвера. Напряжение следует увеличивать при последовательном подключении. Напряжение нагрузкой как таковой не является, нагрузка определяется током.
Опять же вопрос: как же происходит защита при отказе одного из элементов- выхода из строя выходного канала контроллера, драйвера или самого ШД? Ведь при неисправности любого элемента произойдет перекос по нагрузке, что произведет к выходу из строя приводов или второго двигателя. Также может произойти режим рекуперации на двигателе, если например откажет канал контроллера, вследствии чего вылетит и драйвер.
9 Ответ от maksim.mixeew2017 2017-11-16 14:26:39
Как Вам сказать,идеальной защиты нет,при отказе контролера встанет весь станок,при отказе драйвера,встанет шд,но второй продолжит работать,не надолго,так как на самом драйвере стоит защита шд,которая и его остановит.На шпинделе так же,на инверторе есть защита.
Добавлено: 2017-11-16 16:28:09
В любом случае,что бы избежать неприятностей,надо регулярно проводить ТО и осмотр станка.
10 Ответ от Sem 2017-11-16 15:49:50
Примерно понятно.
Хотя есть ещё вопросы, но скорей всего к производителям комплектующих.
11 Ответ от anykey54 2017-11-17 12:53:38 (изменено: anykey54, 2017-11-17 12:56:05)
Коллеги, появился новый интересный драйвер
Что-нибудь необычного заметили? Нет? Тогда смотрим сюда:
А питание-то у него " 24V-80VDC or VAC16-70VAC" О, как! Можно БП не использовать. Нашел по нему всего один маленький обзорчик на тюбике от нерусского коллеги - очень хвалит, не греется, говорит, стабильный и ваще конфета. 6А, пиковый 7,2А. Для Нема34 специально.
12 Ответ от Master Yoda 2017-11-17 13:16:05
Цена вопроса и целеобразность использования ?
13 Ответ от ygordom 2017-11-17 13:24:15
Это получается он со своим встроенным импульсником, круто, очень даже круто ))))
14 Ответ от leo_m_1 2017-11-17 18:13:45 (изменено: leo_m_1, 2017-11-17 23:05:14)
У многих драйверов есть свой диодный мост и они могут работать от переменки и постоянки. У меня похожие драйвера тоже есть свой диодный мост. В этих нет своего импульсника! Максимум 70в переменки. им можно подавать.
15 Ответ от anykey54 2017-11-17 18:21:30 (изменено: anykey54, 2017-11-17 18:25:34)
Цена вопроса и целеобразность использования ?
49 американских денег - тыц по поводу целесообразности - экономия на БП (а уж на трех или четырех, так вообще ощутимая).
со своим встроенным импульсником
вычитал, что с выпрямителем (хотя, перевод - штука ненадежная), а китаец написал, что пофигу, как подключать, там типа само все сделается, если постоянный той, но на тюбике смотрел видео, там подключал человек, как привычно - масса крайний, плюс - со стороны других клемм. По плате инфы очень мало, практически нет, китайцы говорят, новая, по отзывам очень хорошая. Если питать переменным, то чет меня сомнения берут по поводу, а какой же мощности (и размера) должен быть транс? Игорь, ты в этом хорошо разбираешься, подумай?
Мне такие едут, ибо *********(цензура) драйвера уже трижды купил! Но два питальника по 800 Ватт я все же взял к ним )))
16 Ответ от ygordom 2017-11-17 18:24:53
Диодный мост не понижает напряжение с 220 до 70, он его только выпримляет (делает + и -)
Понижает его не диодный мост.
17 Ответ от anykey54 2017-11-17 18:28:20 (изменено: anykey54, 2017-11-17 18:30:31)
Игорь, ты прав, но внимательней посмотри, я написал - 24V-80VDC or VAC16-70VAC
Переменкой кормить до 70В, постоянным до 80. Вот я поэтому и спросил про транс - это ж какой он будет такой мощности и 220/70?
18 Ответ от ygordom 2017-11-17 18:31:25 (изменено: ygordom, 2017-11-17 18:32:39)
Я что-то не пойму, он у тебя от сети работает или все-же ему нужна переменка с определенным вольтажом? Т.е. намотанный транс.
Скажем у меня есть рессивер размером с драйвер, старая версия его работала от постоянки 12 вольт, новая версия работает от сети 220.
Если переменка ограничевается 70-ю вольтами, то он далеко не автономный, и дополнительний источник питания ему нужен.
Что касаемо транса на 70 вольт, намотать такой не проблема, тут стоит вопрос по току, есть-ли у драйвера внутри стабилизатор по току или нет, если есть, то можно намотать ампер на 8, а драйвер стабилизирует себе сколько ему нужно, и порог стабилизатора тоже нужно знать что-бы не спалить его к чертям, вообщем хар-ки в студию, тогда можно и будет раздумывать )))
Добавлено: 2017-11-17 19:35:50
19 Ответ от anykey54 2017-11-17 18:43:32
нужна переменка с определенным вольтажом
новая версия работает от сети 220
есть и такие драйвера, офигенские просто! китаисы их позиционируют "для НЕМА_42", но я лучше небольшой вертолет себе куплю, чем их )))
далеко не автономный, и дополнительний источник питания ему нужен
нужно знать что-бы не спалить его к чертям
поэтому я купил для них питальники
я там ссылку на продавана дал выше, ну очень мало инфы по ним, какой-то неруссий коллега славянской наружности видео выложил на тюбике, небольшие коменты от его земляков есть, хвалит. Попробую найти. О, вот жеж
Добавлено: 2017-11-17 21:51:27
Если тебе подойдет сделаю солидную скидку как для хорошего человека
Игорь, спасибо большое! У меня эти драйвера с двумя питальниками по 800 ватт и еще комплект отличных драйверов DQ860MA с четырьмя питальниками на 350 ватт, наконец-то движняк какой-то грузовой начался в честь дня железнодорожника ))). Теперь я как кот Матроскин - с двумя коровами буду, если доедут-таки, тьху-тьху )))
Снизу надевается. Еще раз повторяю. Нисколько не нужно для башмака аспирации оставлять сбоку. Вот если площадка шпинделя будет слишком тонкая, то могут быть неудобства в зависимости от конкретной конструкции башмака.
Например, нашел такой:
А это по 22мм по сторонам шпинделя.
Получается, что хватит 25мм? Все варианты приспособлений не знаю, поэтому и спрашиваю.
Хороший башмак. Сколько есть ширина столько и есть. Зачем дополнительное пространство? Может я неправильно понимаю Ваш вопрос.

Ваш башмак лучше.
я сделал так, что у меня шпиндель подъезжает к каркасу на 5мм примерно. Пластины Z не мешают, они высоко. Потом вспомнил про башмак. А он, как я уже писал выше, на 44 мм шире шпинделя, Т.к. по 22 мм нужно делать отступ от каркаса. Вот и думаю, хватит ли 25мм на будущее, так сказать. Вдруг не будет такого башмака, а будут только еще большего размера. Ассортимент же не знаю, что на рынке с этим делом происходит.
Мой 122 мм. А вообще лучше всего сделать самостоятельно, первым изделием на станке. Либо согнуть из жести.
Пора смотреть на электронику. Прицениться, заложить в бюджет.
Прочитал различные темы в инете по подбору двигателя. И понимаю, что "инженер" из меня никакой. Учился несколько лет, давно, все уже забылось. Вообще не понимаю ничего в подборе, с какой стороны подступиться. Пробовал посчитать. Толку нет. Нужно еще знать, какие скорости нужны в работе станка, ускорения (чтобы выполнялось быстрое торможение и т.п.), скорости шпинделя и прочч. В общем, опять вопрос по популярной теме
Планирую поставить Nema23 самый мощный из этой линейки, чего-нибудь на 4А примерно и 3,6Н/м. Либо из Nema 34, из начальных в таких же диапазонах или чуть больше.
Из данных могу сказать только примерный вес портала со всеми прибамбасами - 30кг, станина - 140кг. Длина ВШП2010-1200мм, на оси ШВП1605. Нужно 4 ШД (два по Y).
У меня получилось, что при прямой передаче (без редуктора) нужно удержание порядка 21кг. Хотя я не спец в этих расчетах.
1. На что смотреть, как посчитать?
2. Что если поставить Nema34, так сказать с запасом, что будет? Скорости снижаются или что? Хуже будет в чем то, когда ставится более сильные ШД, чем расчетные?
. Что если поставить Nema34, так сказать с запасом, что будет.
А как узнать что с запасом? Ведь зависит от станка, от комплектующих, от задач, от режимов. Что-бы реализовать преимущества мощных движков, нужна соответствующая жесткость станка, соответствующий шпиндель.
По-минимуму достаточно исходя из обсуждения в теме, одного самого маломощного nema 23 на Y. Думаю, что с двумя nema 23 по 18кг, будет очень хороший запас. Главное питайте достаточным напряжением.
Что будет плохого от мощных Nema 34 на станке который не сможет реализовать их преимущества? Наверно возможность в случае ошибок/аварий быстрее угробить шпиндель, ломать фрезы как спички, разбивать станок. Если работать четко и безошибочно и не давать чрезмерной нагрузки станку, то вреда от них не будет, как и пользы.


Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях. В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага. На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.


Небольшой обзор и сравнительный тест драйверов leadshine DM856 и HY-DIV268N-5A (TB6600) Для тех кто собирает оборудование ЧПУ но до конца не разобрался в плюсах и минусах этих драйверов.
В конце обзора будет видео работы этих драйверов в различных режимах ну а пока немного фото и описание характеристик данных драйверов.
И так, доайвер шагового двигателя HY-DIV268N-5A собран на микросхеме ToshibaTB6600
Данное устройство представляет собой микрошаговый драйвер для гибридных двухфазных
шаговых двигателей с питанием 12-48 VDC. Драйвер может быть использован для управления
двигателями с динамическим напряжением от 12В до 48В и потребляемым током не более 5А. Для двигателей
типовых размеров от Nema 14 до некоторых
моделей Nema 34 (Однако стоит оговориться, как показывает практика не рекомендуется подавать на драйвер напряжение выше 36в так-как при нештатной ситуации или не правильных режимах работы от обратной ЭДС от двигателей эти драйвера очень быстро выходят из строя.)
По сути этот драйвер ШИМ регулятор, способный удерживать заданный ток в обмотках двигателя. Ток выставляется при помощи рычажковых переключателей рядом с клемной колодкой. Также драйвер может делить шаги до 1/16 что делает работу двигателя более плавной и позволяет добиться большей точности.
Преимущества цифровых драйверов Leadshine над обычными драйверами:
Набор функций для борьбы с резонансом;
Автоматическое определение параметров подключенного двигателя, и выставление оптимальных настроек для него;
Микрошаг до 102400 имп/об;
Автоматическое регулировании тока удержания;
ПИ-регулятор для контроля тока обмоток;
Максимальная входная частота до 200кГц;
Поддержка режимов работы PUL/DIR и CW/CCW;
Возможность тонкой настройки с персонального компьютера;
Возможность тестирования работы двигателя в отсутствие внешнего источника импульсов, благодаря встроенному генератору.
Рассмотрим подробнее особенности цифровых драйверов, и возможности их использования в реальных ситуациях.
При подключении нового двигателя к цифровому драйверу, последний автоматически определяет параметры двигателя, устанавливая необходимый максимальный рабочий ток. Эта функция очень полезна в тех случаях, когда под рукой нет спецификаций на подключаемый двигатель, и его рабочий ток неизвестен. Однако, выставить максимальный ток двигателя можно и принудительно, с помощью переключателей на драйвере, либо конфигурированием с компьютера посредством программы ProTuner. Выбор режима конфигурирования тока (переключатели или компьютер) осуществляется переключателями SW1, SW2, SW3. Когда эти переключатели находятся в положении «OFF», «работают» настройки, выставленные с компьютера. Иное их положение задает максимальный ток двигателя в зависимости от того, какой переключатель в каком положении находится, при этом настройки с компьютера игнорируются.
Что касается режима микрошага, то конечно же, он не выбирается автоматически. Его конфигурация производится вручную, либо с помощью переключателей, либо с компьютера через программу ProTuner. Алгоритм аналогичен установкам тока. Переключатели SW5 – SW8, в установленном положении «ON», определяют конфигурирование с компьютера; любое иное положение этих переключателей задает микрошаг в соответствии с тем, какой переключатель в каком положении находится, при этом настройки с компьютера игнорируются.
Вообще, конфигурирование тока и микрошага с помощью компьютера оказывается очень удобным в тех случаях, когда физический доступ пользователя к драйверу ограничен.
Также компьютер дает возможность провести тонкую настройку иных параметров, конфигурирование которых в обычных драйверах даже не предусмотрено.
Например настройка коэффициента пропорциональности и постоянной времени интегрирования для встроенного ПИ-регулятора тока. При использовании обычного драйвера, вы не можете быть точно уверены в том, что реальный рабочий ток двигателя соответствует установленному. Он может быть больше установленного – в этом случае происходит избыточный нагрев двигателя, потери мощности, ввиду возросшего сопротивления. Ток может быть также меньше установленного – в этом случае двигатель не будет развивать заявленного крутящего момента. Эти отклонения тока от заданного значения невелики, однако они возможны.
Возможны потому, что большинство обычных драйверов имеют схемотехнику пропорционального регулирования тока. Как известно из теории автоматического регулирования, при использовании только пропорциональной составляющей, неизбежна остаточная неравномерность, при которой реальное значение будет меньше заданного. При достаточно большом коэффициенте пропорциональности, остаточной неравномерности не будет, однако возникнут незатухающие колебания, приводящие к тому, что реальное значение тока будет то больше, то меньше заданного.
Цифровые драйвера Leadshine имеют встроенный пропорционально-интегральный регулятор. Интегральная составляющая позволяет убирать остаточную неравномерность при заданном коэффициенте пропорциональности, исключающем возможность автоколебаний. ProTuner позволяет не только менять эти коэффициенты, но и просматривать реальные значения тока и его отклонения от заданного значения с помощью графиков.
Рис. 2. Постоянная времени интегрирования Ki равна 0, то есть выключена. На графике видно, что при этом реальное значение тока двигателя меньше установленного. Крутящий момент при этом меньше паспортного значения.
Рис. 3. При правильно подобранных настройках регулятора реальное значение тока двигателя равно заданному. Крутящий момент соответствует паспортному значению.
Ещё одной важной возможностью, реализуемой с помощью программы ProTuner, является борьба с резонансом. Как известно, существует три области резонансных частот шагового двигателя, каждая из которых имеет свою природу: низкочастотная, среднечастотная, высокочастотная. Теоретическое определение резонансной частоты любой области является очень трудоемким делом, и, как правило, эти никто не занимается. Работа строится по принципу «авось пронесёт», и если вдруг «не проносит», то уже в этом случае начинают приниматься какие-то меры, например увеличивают момент инерции нагрузки, ставят демпфирующие муфты, и т.д.
ProTuner позволяет выявлять резонансные частоты еще на стадии наладки, и устранять резонанс. Это производится с помощью внутреннего генератора импульсов цифрового драйвера Leadshine.
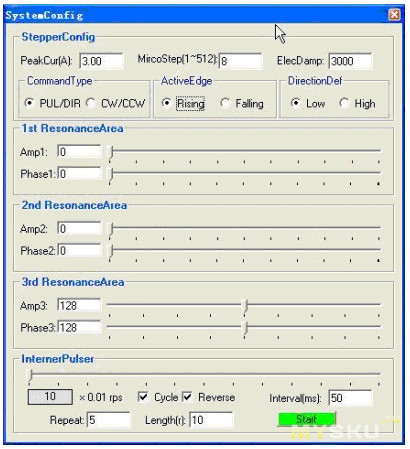
Рис. 4. В верхней части настройки микрошага, тока и режима работы. В средней части антирезонансные настройки. В нижней части окна производится управления встроенным генератором импульсов.
Двигатель с нагрузкой (именно с рабочей нагрузкой!) подключается к драйверу, далее, как видно из рисунка 4, можно плавно менять частоту генератора, и пройти весь диапазон частоты вращения вала двигателя. При этом можно физически наблюдать, при какой частоте генератора возникает резонанс двигателя, после чего в соответствующей резонансной области пользователь меняет значения «Amp» и «Phase», подбирая их опытным путём, вплоть до устранения резонанса.
Как видим, цифровой драйвер в большинстве случаев оказывается предпочтительнее обычного, несмотря на чуть более высокую цену, так как взамен пользователь получает множество функций, которые невозможны на обычных аналоговых драйверах.
Стоимость драйверов сильно отличается, на данный момент стоимость HY-DIV268N-5A составляет 12$ так как Leadshine DM856 35$ Однако из описания видно за что стоит переплатить и получить более качественный продукт.
В заключении как и обещал небольшое видео теста. Сравнивать будем на одной оси станка при напряжении 24в и делении шага 1/8 шаговый мотор типоразмера nema23
его маркировка FL57STH76-2804A
Блок питания 24в. 15а.
Шаговый мотор FL57STH76-2804A
Читайте также: