
Плк дельта программа для программирования
Обновлено: 07.07.2024
Всю свою рабочую жизнь я занимался наладкой автоматических систем управления. Сначала это были только котельные и тепловые пункты, потом ещё разные газоиспользующие установки, а потом дело дошло и до автоматизированных производственных конвейеров, промышленных роботов и прочих прекрасных вещей. Использовал я всякие разные контроллеры. Это были Овен, Сименс, Дельта, Сенека. Просто восьмибитные микроконтроллеры и stm32.
Я всячески избегал FBD. CoDeSys позволял писать программы на паскале-подобном языке (ST). Это было близко и понятно. Хотя я и разбирался в принципиальных электронных схемах, я всё равно не любил использование FBD, уже хотя бы за то, что некоторые вещи просто не знал как реализовать. Использование графических языков всегда занимало массу времени, результат получался ниже среднего.
Где-то год назад я столкнулся с производителем Segnetics. Некоторые их контроллеры можно (сильно извратившись) программировать на плюсах. Однако, для этого надо пройти, как минимум, чистилище, а то и пару кругов ада. Поскольку я не хотел повышать уровень красноглазия - решил использовать стандартные методы, предоставляемые производителем. Нужно было делать несколько проектов для этих контроллеров.
Поначалу раздражало абсолютно всё в этом их SMLogix. Лишь через месяц-другой я начал привыкать. Ещё через месяц - одобрять. Дальше больше. Не могу сказать, что я "подсел" на FBD, но моё отношение к программированию контроллеров изменилось.
После того, как я выполнил несколько реальных проектов на их контроллерах, пришло понимание, почему в лоджике нет возможности писать код внутри блока текстовым языком. Дело не в том, могут они это разрешить или не могут. Дело в том, что это не нужно. Составляя программу на фбд, программист не может прострелить себе ногу. А вот текстовые языки, в большинстве случаев, позволяют это сделать в пару строк, а то и в одну. А ещё бывает, что нога простреливается по незнанию, неумению, невнимательности, и ещё тысяча причин.
Самое главное, на мой взгляд, это знать, какими средствами (блоками) решаются те или иные задачи. Как это делать эффективно и к каким побочным эффектам это приводит. При тщательном подходе и продумыванию структуры проекта - вообще никаких неожиданностей не возникает. Всё будет работать именно так, как запроектировано.
Крутые примеры у меня есть. Приводить их здесь, конечно, не буду. Скажу только, что делал несколько проектов для их сенсорного контроллера. У заказчика были высокие требования к интерфейсу. Это было особенно "болезненно" для меня, так как я никогда не делал серьёзных интерфейсов ранее. Максимум менюшка со списками. А здесь нужно было и анимацию сделать, и всякие жестовые штуки (свайпы, пинчи и прочая вот эта ерунда).
Теперь скажу и о негативной стороне. В частности, когда нет заводской "из коробки" поддержки жестов - приходится танцевать с бубном в этом fbd. Не сказал бы, что реализация нормального "драйвера тач скрина" на фбд невозможна. Да, это не просто, но это выполнимо, и в конечном итоге, работает адекватно. В целом, новый продукт хоть и понравился, но софт заточен под старое. Что ж, лично я буду надеяться, что они-таки выпустят что-то новое, в плане приклада.
В итоге, вся вот эта простыня, написанная выше, написана с целью донести одну мысль: если есть задача программирования ПЛК и подобных задач, без всякой сложной математики, работы с базами данных и прочее - FBD подходит идеально. Время разработки программы сокращается, заработок в час растёт. А когда объект налажен и работает без сбоев - все довольны.
Применение программируемых логических контроллеров (ПЛК) совместно с преобразователями частоты (ПЧ) в современных системах автоматизации позволяет решать наиболее сложные задачи по управлению электродвигателем. Реализовать управление частотным преобразователем с контроллера возможно несколькими способами, один из которых - управление по цифровому интерфейсу RS-485. В данной статье будет рассмотрено подключение преобразователя частоты ELHART EMD-MINI к программируемому логическому контролеру Delta DVP14SS211R, настройка связи по интерфейсу RS-485 и протоколу Modbus RTU, приведен пример управляющей программы для контроллера, реализующую обмен данными и управление преобразователем частоты.
1. Техника безопасности
ВНИМАНИЕ! К работам по монтажу, наладке, ремонту и обслуживанию технологического оборудования допускаются лица, имеющие техническое образование и специальную подготовку (обучение и проверку знаний) по безопасному производству работ в электроустановках с группой не ниже 2 для ремонтного персонала, а также имеющие опыт работ по обслуживанию оборудования, в конструкцию которого вносятся изменения и дополнения, либо производится модернизация. За неисправность оборудования и безопасность работников при неквалифицированном монтаже и обслуживании ООО «КИП‑Сервис» ответственности не несет.
2. Подключение ПЧ и ПЛК
В данном примере для подключения преобразователя частоты к промышленному программируемому контроллеру используется порт COM2. Необходимо соединить клемму «+» порта контроллера с клеммой «RS+» преобразователя частоты и клемму «-» с клеммой «RS-» соответственно. Схема подключения изображена на рисунке 1.
Рисунок 1 - Подключение преобразователя частоты и контроллера по RS-485
3. Настройка сетевых параметров ПЧ EMD-MINI
В преобразователе частоты необходимо установить параметры согласно таблице 1.
| Параметр | Значение | Описание |
|---|---|---|
| P101 | 5 | Источник задания выходной частоты - интерфейс RS-485 |
| P102 | 2 | Источник команд управления - интерфейс RS-485 |
| P700 | 1 | Скорость передачи данных - 9600 бод |
| P701 | 3 | Формат данных - 8,N,1, протокол Modbus RTU |
| P702 | 1 | Адрес преобразователя частоты - 1 |
4. Адресация регистров ПЧ EMD-MINI
В данном примере будет рассмотрено чтение регистров состояния привода, текущей выходной частоты, состояния дискретных входов и дискретного выхода, запись команды управления приводом и задание выходной частоты. Адреса и описание регистров представлены в таблице 2.
| Параметр | Описание | Функция | Адрес | |
|---|---|---|---|---|
| Управление приводом | bit1-bit0 | 00B: нет действия 01B: Стоп 10B: Пуск 11B: работа на частоте JOG | запись | 2000h |
| bit3-bit2 | 00B: нет действия 01B: вращение в обратном направлении 10B: вращение в прямом направлении 11B: сменить направление вращения | |||
| bit4 | 0B: нет действия 1B: сброс аварии | |||
| Задание выходной частоты | диапазон 0. 9999 (0. 999,9 Гц) | Чтение/Запись | 2001h | |
| Мониторинг состояния | bit0 | 0В: прямое направление вращения 1В: обратное направление вращения | Чтение | 001Сh |
| bit1 | 0B: Стоп 1B: Пуск | |||
| Текущая выходная частота | диапазон 0. 9999 (0. 999,9 Гц) | Чтение | 0002h | |
| Состояние дискретных входов и выходов | bit0 - вход FWD bit1 - вход REV bit2 - вход S1 bit3 - вход S2 bit9 - дискретный выход. | Чтение | 0016h | |
Если необходимо использовать другие регистры, их адреса можно узнать по номеру параметра, указанного в руководстве по эксплуатации. Номер параметра соответствует адресу регистра в шестнадцатеричном формате, например:
- параметр P003 (выходной ток) - 0003h;
- параметр P107 (время ускорения) - 006Bh;
- параметр P108 (время замедления) — 006Сh.
Например, чтобы подать преобразователю частоты команду на пуск электродвигателя в прямом направлении, необходимо в регистр 2000h записать значение 1010b или число 10 в десятичном формате, а для запуска в обратном направлении - число 0110b или 6 в десятичном формате. Частота задается в регистре 2001h. Для того чтобы установить частоту вращения 30 Гц, в регистр необходимо записать число 300 в десятичном формате.
5. Программирование промышленного контроллера Delta
В данном примере будет описан процесс создания управляющей программы для ПЛК в среде WPLSoft на языке лестничных диаграмм (LD).
5.1. Конфигурация порта COM2
В первую очередь необходимо произвести настройку порта COM2 контроллера. Пример программы для настройки порта представлен на рисунке 2.

Рисунок 2 - Задание настроек порта COM2
М1002 включается один раз при включении контроллера.
D1120 - конфигурация порта COM2. В преобразователе частоты EMD-MINI были установлены следующие настройки связи: скорость 9600 бод, 8 бит данных, контроль четности отсутствует, 1 стоповый бит. Такие же настройки необходимо установить для порта COM2 контроллера. Значения битов для регистра D1120 представлены в таблице 3.
| Номер бита | Описание | Значение |
|---|---|---|
| 0 | Длина данных | 0 - 7 бит данных 1 - 8 бит данных |
| 1-2 | Биты четности | 00 - нет 01 - нечетный 11 - четный |
| 3 | Стоп-биты | 0 - 1 бит 1 - 2 бит |
| 4-7 | Скорость передачи данных | 0000 - 110 0010 - 150 0011 - 300 0100 - 600 0101 - 1200 0110 - 2400 0111 - 4800 1000 - 9600 1001 - 19200 1010 - 38400 1011 - 57600 1100 - 11520 1101 - 500000 1110 - 31250 1111 - 921000 |
| 8 | Выбор стартового бита | 0 - нет; 1 - D1124 |
| 9 | Выбор 1-го конечного бита | 0 - нет; 1 - D1125 |
| 10 | Выбор 2-го конечного бита | 0 - нет; 1 - D1126 |
| 11-15 | Не используются |
В таблице 4 показано, как формируется значение для регистра D1120 с использованием данных из таблицы 3.
| Биты 15 - 8 | Скорость 9600 | 1 стоп-бит | Биты четности-нет | 8 бит данных |
|---|---|---|---|---|
| В данном примере не используются | 1000 | 0 | 00 | 1 |
В результате в регистр D1120 необходимо записать число 10000001b, предварительно переведя его в шестнадцатеричный формат - 81h. Также можно воспользоваться встроенным в WPLSoft калькулятором в разделе Help>Auxiliary Editing>Protocol⇔Setting Code (рисунок 3).
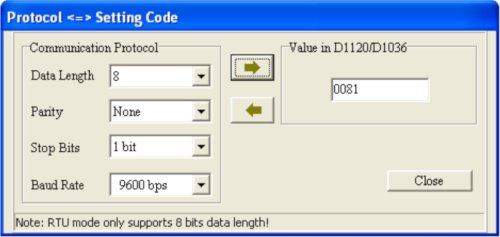
Рисунок 3 - Вычисление значения для записи в регистр D1120
В полях слева необходимо выбрать конфигурацию протокола и нажать на стрелку вправо. В поле справа будет число в шестнадцатеричном формате, которое нужно записать в D1120.
М1143 - реле выбора режима ASCII/RTU. Если оно включено, то используется режим RTU, если выключено - режим ASCII.
D1129 - настройка времени ожидания ответа в миллисекундах. Если время ожидания ответа будет превышено, включится специальное реле М1129. В данном примере время ожидания составляет 300 миллисекунд.
М1120 - сохранение параметров связи для порта COM2.
5.2. Инициализация и создание очереди запросов
После настройки коммуникационного порта ПЛК необходимо добавить в программу инициализации два регистра и записать в них значения, как это показано на рисунке 4.

Рисунок 4 - Инициализация и начальная запись в регистры D0 и D1
В регистре D0 будет находится значение установленной частоты, в регистре D1 - команды управления приводом. В данном примере после запуска контроллера в преобразователь частоты будет отправляться задание частоты 30 Гц и команда «Стоп».
Так как преобразователи частоты включаются медленнее чем промышленные контроллеры, то необходимо выждать некоторое время перед началом процедуры обмена по интерфейсу RS-485. В данном примере эту задержку реализует таймер T0 и задержка составляет 1 секунду.
Инструкции "LD<>" и внутренние реле М20 и М21 будут необходимы для отправки запроса на запись при изменении содержимого регистров D0 и D1.
Преобразователь частоты EMD-MINI поддерживает чтение Modbus-командой 03 и запись командой 06, поэтому для обмена данными удобно использовать инструкции MODRD для чтения и MODWR для записи. Так как в программе будет применяться несколько инструкций обмена данными, необходимо разделить их выполнение по времени так, чтобы в каждый момент выполнялась только одна из инструкций. Пример возможной реализации очередности запросов приведен на рисунке 5.

Рисунок 5 - Организация поочередного исполнения инструкций чтения/записи
По истечении времени задержки включается выход таймера Т0 и происходит сравнение значения счетчика С0 с константой. При совпадении включается одно из внутренних реле M1 - M5, которые служат условием выполнения инструкций MODRD и MODWR. Для начала обмена данными необходимо включить специальное реле M1122, после чего будет выполнена одна из инструкций чтения или записи.
5.3. Чтение регистров и преобразование данных
Первыми по порядку будут исполняться инструкции MODRD - чтение регистров. При значении счетчика С0=0 выполнится первая инструкция MODRD. В этой инструкции необходимо указать следующие параметры:
| MODRD | Адрес устройства | Адрес регистра | Длина данных |
|---|
Адрес устройства – 1 (значение К1);
Адрес регистра – 2 (значение Н2), текущая выходная частота;
Длина данных – 1 (значение К1), количество считываемых регистров.
Далее находятся еще две инструкции чтения – регистра состояния ПЧ (H1C) и регистра состояния дискретных входов и дискретного выхода (H16).
При работе инструкции MODRD считанные данные сохраняются в регистры D1070-D1076, как показано в таблице 5.
| Регистр | Данные |
|---|---|
| D1070 младший байт | Адрес устройства |
| D1071 младший байт | Код функции чтения |
| D1072 младший байт | Количество данных (байт) |
| D1073 младший байт | Содержимое регистра |
| D1074 младший байт | Содержимое регистра |
| D1075 младший байт | CRC |
| D1076 младший байт | CRC |
Как видно из таблицы, данные записываются в младшие байты регистров D1070-D1076 и для дальнейшего использования данные необходимо преобразовать и поместить в один регистр. Пример реализации преобразования приведен на рисунке 6.

Рисунок 6 - Преобразование данных
При срабатывании специального реле М1127 (завершение приема данных) происходит преобразование с помощью инструкции DTM. Младшие байты из регистров D1073 и D1074 объединяются и значение пересылается в регистр D3. Те же преобразования будут сделаны и для следующих двух инструкций чтения, после чего преобразованные данные будут помещены в регистры D4 и D5 соответственно.
При срабатывании специального реле М1127 или флагов ошибок приема или передачи (М1129, М1140 и М1141) происходит увеличение значения счетчика C0 и переход к следующей инструкции чтения или записи.
5.4. Запись регистров
Пример записи регистров приведен на рисунке 7. Если значение регистров D0 или D1 изменяются, то срабатывают реле М20 или М21 и происходит исполнение соответствующей инструкции MODWR.

Рисунок 7 - Запись регистров при изменении значения D0 или D1
Порядок записи параметров инструкции MODWR:
| MODWR | Адрес устройства | Адрес регистра | Данные для записи |
|---|
Адрес преобразователя частоты - 1 (значение К1);
Адрес регистра - 2001 (значение Н2001), регистр, в который будет производиться запись;
Источник данных для записи - регистр D0.
Данные из регистра D0 записываются в регистр H2001, из D1 - в регистр Н2000. После успешной записи данные из регистра D0 копируются в регистр D10, а из регистра D1 - в регистр D11, реле M20 и М21 сбрасываются (рисунок 8).

Рисунок 8 - Сброс флагов М20 и М21 при успешной записи
5.5 Работа с битовыми значениями
Так как данные состояния дискретных входов и дискретного выхода считываются целым регистром, необходимо из считанного значения выделить нужные биты. Сделать это можно с помощью инструкции BLD - установка состояния нормально открытого контакта по заданному биту. Инструкция имеет следующий формат записи:
На рисунке 9 приведен фрагмент программы, где в регистрах D4 и D5 проверяется состояние определенных битов и затем их значения присваиваются внутренним реле М6-М12.

Рисунок 9 - Обработка битовых значений
Например, в регистре D5 находятся данные, считанные из регистра 0016h преобразователя частоты. Значение K0 означает, что проверяется состояние входа FWD.
Все полученные значения из регистров преобразователя частоты EMD-MINI приведены в таблице 6.
| Регистр/реле | Описание |
|---|---|
| D0 | Задание частоты |
| D1 | Команды управления приводом |
| D3 | Текущая выходная частота |
| М6 | 0 - Прямое направления вращения 1 - Обратное направление вращения |
| М7 | 0 - ПЧ в режиме Стоп 1 - ПЧ в режиме Пуск |
| М8 | Состояние входа FWD |
| М9 | Состояние входа REV |
| М10 | Состояние входа S1 |
| M11 | Состояние входа S2 |
| M12 | Состояние дискретного выхода |
5.6. Практический пример
Нередко встречаются задачи, в которых необходимо осуществлять пуск на фиксированной частоте и остановку трехфазного асинхронного электродвигателя с программируемого логического контроллера, а также иметь возможность осуществлять локальное управление с кнопки. Для решения данной задачи следует произвести подключение кнопок, как показано на рисунке 10.

Рисунок 10 - Схема подключения
Также необходимо добавить в начало программы несколько инструкций (рисунок 11).

Рисунок 11 - Пример работы с кнопками
Внутреннее реле М8 - дискретный вход FWD преобразователя частоты, состояние которого считывает ПЛК по интерфейсу RS-485. К нему подключена кнопка c нормально открытым контактом без фиксации.
Х0 - вход ПЛК DVP14SS211R к которому подключена такая же кнопка. Инструкция ALTP инвертирует состояние внутреннего реле М30 каждый раз, когда включается М8 или X0. В результате, при нажатии на любую из кнопок произойдет запуск электродвигателя на частоте 30 Гц, при повторном нажатии – остановка.
Заключение
Рассмотренный в данной статье пример показывает процедуру организации управления преобразователем частоты ELHART EMD-MINI c помощью программируемого логического контроллера DELTA DVP14SS211R. На основе этого примера можно создавать собственные, более сложные алгоритмы управления электроприводом.
Программируемые логические контроллеры Delta давно присутствуют на отечественном рынке и заслужили популярность у пользователей. Сегодня мы рассмотрим Delta DVP14SS11R2. Это младшая модель из компактной серии ПЛК Delta DVP для простых задач.
Характеристики
Как видно из параметров, DVP14SS11R2 со своими 14 точками дискретного ввода/вывода занимает нишу недорогого ПЛК для несложных задач. При этом есть возможность подключить дополнительные модули расширения и увеличить тем самым количество точек ввода/вывода. Однако размер программы составляет всего 4К шагов.
Конструкция
Главная особенность, которая сразу бросается в глаза, — это маленькие размеры ПЛК. Он буквально помещается в ладонь. Размер, основные элементы и комплектацию поставки ПЛК можно оценить на видео.
Внимательно рассмотрим корпус ПЛК.

Рис.1 – ПЛК, вид спереди
- Светодиодная индикация состояния ПЛК. Светодиоды RUN и POWER зеленые, ERROR — красный.
- Переключатель Работа/Стоп (RUN/STOP).
- Порт RS-232, круглое гнездо MiniDIN-8. Предназначен для передачи данных и загрузки программы в ПЛК.
- Порты дискретных входов и выходов, имеют светодиодную индикацию. Выходы релейные, максимальная нагрузка 250VAC/1.5A. Для подключения сигналов используются съемные коннекторы Dincle EC350V-09P.

Рис.2 – ПЛК, нижняя поверхность
- Порт RS-485, для подключения к линии связи используется съемный коннектор Dincle EC350V-02P.
- Разъем питания 24V DC, для подключения к блоку питания используется кабель, идущий в комплекте с ПЛК.

Рис.3 – ПЛК, боковая поверхность
- Порт для подключения модулей расширения. Подключаются до восьми модулей, при этом общее число точек ввода/вывода программируемого логического контроллера не должно превышать 256. Доступны модули дискретного и аналогового ввода/вывода, модули связи Profibus и DeviceNet.
- Шильдик с некоторыми характеристиками ПЛК.
Название модели DVP14SS11R2 расшифровывается так:
- DVP — серия программируемого логического контроллера;
- 14 — точек ввода/вывода;
- SS — компактная серия ПЛК первого поколения;
- 11 — питание 24V DC;
- R — релейные выходы;
- 2 — версия модуля.

Рис.4 – ПЛК, задняя поверхность
Крепление модуля осуществляется на DIN-рейку.
Для загрузки программы в контроллер через его порт COM1 используются кабели USBACAB230 USB и DVPACAB2A30 RS-232. Из последнего Delta секрета не делает и открыто публикует схему, по которой любой желающий может спаять загрузочный кабель себестоимостью ниже 1$.

Рис.5 – Цоколевка загрузочного кабеля DVPACAB2A30
DVPACAB2A30 можно подключить к компьютеру или ноутбуку через любой преобразователь USB-RS232.
Порты связи
DVP-14SS имеет два порта последовательной передачи данных:
- COM1 RS-232. Режим работы только Slave. Протокол Modbus ASCII/RTU, скорость до 115200 bps. Также используется для загрузки программ.
- COM2 RS-485. Режим работы Master/Slave. Протокол Modbus ASCII/RTU, скорость до 115200 bps.
Из-за того что COM1 работает только как Slave, к нему обычно подключают панель оператора HMI. Параметры связи COM1 и COM2 настраиваются через специальные регистры.
К программируемому логическому контроллеру можно подключить модули расширения DVPDT01-S DeviceNet Slave и DVPPF01-S Profibus Slave.
Программная архитектура
Программная архитектура Delta DVP-SS напоминает Mitsubishi FX и, скорее всего, это не случайно, учитывая популярность этой платформы в Юго-Восточной Азии.
Таблица: основные операнды.
Дискретный выход ПЛК
В DVP-SS операнды разделены на общие, энергонезависимые и специальные.
Некоторые специальные операнды:
- М1000 — ПЛК в состоянии «Работа» (RUN);
- M1002 — первый проход программы; используется для начальной инициализации;
- M1011…1014 — импульсы с периодом 10 мс, 100 мс, 1 сек, 1 мин;
- D1036, M1138, M1139 — настройка COM1;
- D1120, M1120, M1143 — настройка COM2.
Программа для контроллера состоит из инструкций. Размер каждой инструкции измеряется в шагах (step), и чем она сложнее, тем больше шагов занимает. Например, инструкция SET, которая устанавливает бит в единицу, занимает один шаг. А инструкция PID — 17 шагов.
Максимальный размер программы официально составляет 4К шагов. А на самом деле 3792 шага.
Программирование
Программы для контроллеров серии DVP-SS разрабатываются в бесплатной среде программирования ISPSoft.
Для DVP-SS доступны языки программирования LD, IL и SFC.
Программа создается с помощью инструкций. Есть инструкции ветвления, операции с переменными типа bool, integer и float, математические операции, ПИД-управление и т.д.

Рис.6 – Все инструкции DVP-SS
Что особо радует, даже для ПЛК начального уровня, каковым является серия DVP-SS, в ISPSoft есть возможность создавать функциональные блоки (FB). Этого нет не только у многих других китайских братьев по классу (Wecon, Xinje), но и у брендовых ПЛК начального уровня (Shneider M221).
Кроме того, имеется библиотека Delta FB, в которой реализованы некоторые полезные функциональные блоки (DFB). Например, таймеры с задержкой включения и отключения TON и TOF.
Вот так работают простые инструкции и DFB:
Для загрузки в ПЛК необходимо установить отдельную программу COMMGR (аббревиатура от Сommunication Manager). В ней нужно создать конфигурацию и указать номер COM-порта компьютера, через который разработанная пользователем программа будет загружаться в ПЛК.
В ISPSoft есть симулятор ПЛК, работает он также через COMMGR.
Симуляция программы ISPSoft в COMMGR:
Антивирус Avast воспринимает симуляторы, входящие в состав COMMGR 1.09, как вирусы и блокирует их.

Рис.7 – Антивирус заблокировал программу-симулятор
Нужно добавить папку COMMGR (путь по умолчанию C:\Program Files\Delta Industrial Automation\COMMGR) в исключения антивируса.
Что касается пользовательского интерфейса, то есть претензии к текущей версии ISPSoft 3.06.
Функции некоторых кнопок трудно определить по пиктограммам. Например, на кнопке «RUN» вместо принятого в таких случаях треугольника поставили пиктограмму в виде ладони с вытянутым пальцем. Не всегда выполнение действий в сходных ситуациях единообразно. Например, в Global Symbols можно добавить новый элемент через контекстное меню, а в Device Monitor -> Monitor Table нельзя. Даже разобраться, как с помощью кнопок разместить в Network два контакта подряд или сделать ветвление, не так просто: отсутствует банальная «рисовалка линий связи», как в других средах программирования.
Ветвление Network и загрузка программы в ПЛК:
В программе одновременно не отображается адрес и символьное имя переменной (например, X0 “MOTOR_ON”). Если вы захотите переключаться между символьным и адресным представлением переменных — а вы захотите, то сначала нужно в меню включить Tools -> Options -> Symbol Table -> Symbol/Address mode switch. Дальше переключение осуществляется кнопкой «ADDR».
Недостатки интерфейса не критичны, но на начальном этапе слегка тормозят освоение ISPSoft. Привыкнув к интерфейсу, дальше работаешь без проблем.
Из-за того что инструкции состоят из разного количества шагов, трудно оценить, сколько инструкций поместится в 3792 шага.
Чтобы примерно рассчитать соотношение количества инструкций и шагов, я создал тестовую программу. Она реализует типичную производственную задачу: по нажатию кнопки поочередно включает шесть клапанов, между включениями которых выдерживается пауза. В программе задействовано два таймера и 30 инструкций (не считая инструкций ветвления). Откомпилированный код программы (Objective Code Usage) занял 101 шаг. Таким образом, соотношение инструкций и шагов примерно 1:3. Но еще 865 шагов было отведено на некое «программное использование» (Program Usage), что бы это ни значило. Программу клапанов и все остальные примеры, тут рассмотренные, можно скачать по ссылке внизу статьи.
Принцип отвода памяти под Program Usage мне неясен. Даже в простейшей программе, которая состоит всего из одного Network вида |—|x0|—(y0), Objective Code займет три шага, а Program Usage целых 478 шагов.
Что касается изучения Delta DVP-SS, то для этого информации хватает. На русском языке есть руководство по программированию, эксплуатации, инструкции на модули расширения.
В «Руководстве по программированию DVP» изложение материала начинается с общих принципов работы релейных схем в ПЛК , что будет полезно для тех, кто только знакомится с ПЛК .
На YouTube размещено огромное количество видеороликов по ISPSoft, в том числе на русском языке.
DVP SS2
Для замены программируемого логического контроллера серии DVP-SS компания Delta выпустила следующее, второе, поколение компактных контроллеров, под названием DVP-SS2. Сохранив от первого поколения основную концепцию — недорогой контроллер для простых задач и маленький форм-фактор, DVP-SS2 получил улучшенные характеристики.
Увеличена память программ до 8К шагов, точек ввода/вывода до 480, регистров данных (D) до 5000 и так далее. Появились новые функции. Например, PLC-LINK, протокол связи для простого соединения между собой устройств Delta: ПЛК , частотных преобразователей и сервоприводов.
DVP-SS2 совместим с программами DVP-SS. Общие принципы работы остались те же.
Подводя итоги
ПЛК DVP 14SS и вся серия SS/SS2 — маленькие по размерам и простые в эксплуатации устройства. Надежность ПЛК может показать только время, и здесь у DVP-SS все хорошо: они давно присутствуют на отечественном рынке и показали себя с положительной стороны. Ближайший аналог контроллеров этих серий — Mitsubishi FX1/FX2. Но у DVP-SS первый последовательный порт может работать по протоколу Modbus, что дает определенное преимущество.
Есть возможность подключить к DVP 14SS модули расширения и тем самым увеличить количество входов и выходов. Но сильно обольщаться не стоит: ограничение размера программы в 4К шагов у DVP-SS и 8К шагов у DVP-SS2 не позволит реализовать сложную программу.
Среда программирования ISPSoft бесплатная, простая и понятная, хотя и имеет недоработки в дизайне. Зато в ISPSoft можно создавать функциональные блоки даже для самых слабых ПЛК, вроде DVP 14SS , чем могут похвастаться не все конкуренты. Хотя в производство запущено следующее поколение ПЛК, под названием DVP-SS2, контроллеры серии SS все еще активно продаются.
ПЛК Delta DVP-SS/SS2 — хороший выбор для построения простых АСУ ТП за небольшие деньги. Одно из главных достоинств ПЛК Delta DVP-SS/SS2 — их низкая цена.
Читайте также: