
Rosa linux обновление через консоль
Обновлено: 08.07.2024
Handle 0x0000, DMI type 0, 20 bytes
BIOS Information
Vendor: Intel Corp.
Version: WB91X10J.86A.0690.2004.1119.1536
Release Date: 11/19/2004
Address: 0xF0000
Runtime Size: 64 kB
ROM Size: 512 kB
Characteristics:
PCI is supported
BIOS is upgradeable
BIOS shadowing is allowed
Boot from CD is supported
Selectable boot is supported
EDD is supported
8042 keyboard services are supported (int 9h)
Serial services are supported (int 14h)
Printer services are supported (int 17h)
CGA/mono video services are supported (int 10h)
ACPI is supported
USB legacy is supported
ATAPI Zip drive boot is supported
BIOS boot specification is supported
Function key-initiated network boot is supported
Handle 0x0001, DMI type 1, 25 bytes
System Information
Manufacturer:
Product Name:
Version:
Serial Number:
UUID: B2471EB2-8D04-11D9-8DE5-000EA68F726A
Wake-up Type: Power Switch
Handle 0x0002, DMI type 2, 20 bytes
Base Board Information
Manufacturer: Intel Corporation
Product Name: D915GVWB
Version: AAC82205-103
Serial Number: FCWB51100564
Asset Tag: Base Board Asset Tag
Features:
Board is a hosting board
Board is replaceable
Location In Chassis: Base Board Chassis Location
Chassis Handle: 0x0003
Type: Unknown
Contained Object Handles: 0
Handle 0x0003, DMI type 3, 17 bytes
Chassis Information
Manufacturer:
Type: Unknown
Lock: Not Present
Version:
Serial Number:
Asset Tag:
Boot-up State: Safe
Power Supply State: Safe
Thermal State: Other
Security Status: Other
OEM Information: 0x00000000
Handle 0x0004, DMI type 8, 9 bytes
Port Connector Information
Internal Reference Designator: PRIMARY
Internal Connector Type: On Board IDE
External Reference Designator: Not Specified
External Connector Type: None
Port Type: Other
Handle 0x0005, DMI type 8, 9 bytes
Port Connector Information
Internal Reference Designator: SECONDARY
Internal Connector Type: On Board IDE
External Reference Designator: Not Specified
External Connector Type: None
Port Type: Other
Handle 0x0006, DMI type 8, 9 bytes
Port Connector Information
Internal Reference Designator: ATX_PWR
Internal Connector Type: Other
External Reference Designator: Not Specified
External Connector Type: None
Port Type: Other
Handle 0x0007, DMI type 9, 13 bytes
System Slot Information
Designation: PCIE X1 SLOT
Type: PCI Express
Current Usage: Available
Length: Short
ID: 12
Characteristics:
3.3 V is provided
PME signal is supported
SMBus signal is supported
Handle 0x0008, DMI type 9, 13 bytes
System Slot Information
Designation: PCI SLOT 1
Type: 32-bit PCI
Current Usage: In Use
Length: Long
ID: 1
Characteristics:
3.3 V is provided
PME signal is supported
SMBus signal is supported
Handle 0x0009, DMI type 9, 13 bytes
System Slot Information
Designation: PCI SLOT 2
Type: 32-bit PCI
Current Usage: Available
Length: Long
ID: 2
Characteristics:
3.3 V is provided
PME signal is supported
SMBus signal is supported
Handle 0x000A, DMI type 10, 6 bytes
On Board Device Information
Type: Video
Status: Enabled
Description: Intel(R) Extreme Graphics 3 Controller
Handle 0x000B, DMI type 10, 6 bytes
On Board Device Information
Type: Ethernet
Status: Enabled
Description: Intel (R) 82562 Ethernet Device
Handle 0x000C, DMI type 10, 6 bytes
On Board Device Information
Type: Sound
Status: Enabled
Description: Intel(R) Azalia Audio Device
Handle 0x000D, DMI type 13, 22 bytes
BIOS Language Information
Language Description Format: Abbreviated
Installable Languages: 1
enUS
Currently Installed Language: enUS
Handle 0x000E, DMI type 32, 20 bytes
System Boot Information
Status: No errors detected
Handle 0x0011, DMI type 7, 19 bytes
Cache Information
Socket Designation: Unknown
Configuration: Enabled, Not Socketed, Level 2
Operational Mode: Write Back
Location: Internal
Installed Size: 256 kB
Maximum Size: 256 kB
Supported SRAM Types:
Asynchronous
Installed SRAM Type: Asynchronous
Speed: Unknown
Error Correction Type: Single-bit ECC
System Type: Unified
Associativity: 4-way Set-associative
Handle 0x0012, DMI type 16, 15 bytes
Physical Memory Array
Location: System Board Or Motherboard
Use: System Memory
Error Correction Type: None
Maximum Capacity: 4 GB
Error Information Handle: Not Provided
Number Of Devices: 4
Handle 0x0013, DMI type 17, 27 bytes
Memory Device
Array Handle: 0x0012
Error Information Handle: Not Provided
Total Width: 64 bits
Data Width: 64 bits
Size: 256 MB
Form Factor: DIMM
Set: None
Locator: J6H1
Bank Locator: CHAN A DIMM 0
Type: DDR
Type Detail: Synchronous
Speed: 333 MHz
Manufacturer: 0xCE00000000000000
Serial Number: 0x080C2236
Asset Tag: Unknown
Part Number: 0x4D332036384C3332323345544E2D43423320
Handle 0x0014, DMI type 20, 19 bytes
Memory Device Mapped Address
Starting Address: 0x00000000000
Ending Address: 0x0000FFFFFFF
Range Size: 256 MB
Physical Device Handle: 0x0013
Memory Array Mapped Address Handle: 0x001B
Partition Row Position: 1
Interleave Position: 1
Interleaved Data Depth: 1
Handle 0x0015, DMI type 17, 27 bytes
Memory Device
Array Handle: 0x0012
Error Information Handle: Not Provided
Total Width: 64 bits
Data Width: 64 bits
Size: 256 MB
Form Factor: DIMM
Set: None
Locator: J6H2
Bank Locator: CHAN A DIMM 1
Type: DDR
Type Detail: Synchronous
Speed: 333 MHz
Manufacturer: 0xCE00000000000000
Serial Number: 0x4102B677
Asset Tag: Unknown
Part Number: 0x4D332036384C3332323343544C2D43423320
Handle 0x0016, DMI type 20, 19 bytes
Memory Device Mapped Address
Starting Address: 0x00010000000
Ending Address: 0x0001FFFFFFF
Range Size: 256 MB
Physical Device Handle: 0x0015
Memory Array Mapped Address Handle: 0x001B
Partition Row Position: 1
Interleave Position: 1
Interleaved Data Depth: 1
Handle 0x0017, DMI type 17, 27 bytes
Memory Device
Array Handle: 0x0012
Error Information Handle: Not Provided
Total Width: 64 bits
Data Width: 64 bits
Size: 256 MB
Form Factor: DIMM
Set: None
Locator: J6J1
Bank Locator: CHAN B DIMM 0
Type: DDR
Type Detail: Synchronous
Speed: 333 MHz
Manufacturer: 0xCE00000000000000
Serial Number: 0x35F14E01
Asset Tag: Unknown
Part Number: 0x4D332036384C3332323344544C2D43423020
Handle 0x0018, DMI type 20, 19 bytes
Memory Device Mapped Address
Starting Address: 0x00020000000
Ending Address: 0x0002FFFFFFF
Range Size: 256 MB
Physical Device Handle: 0x0017
Memory Array Mapped Address Handle: 0x001B
Partition Row Position: 2
Interleave Position: 2
Interleaved Data Depth: 1
Handle 0x0019, DMI type 17, 27 bytes
Memory Device
Array Handle: 0x0012
Error Information Handle: Not Provided
Total Width: 64 bits
Data Width: 64 bits
Size: 256 MB
Form Factor: DIMM
Set: None
Locator: J6J2
Bank Locator: CHAN B DIMM 1
Type: DDR
Type Detail: Synchronous
Speed: 333 MHz
Manufacturer: 0xCE00000000000000
Serial Number: 0x410F6BA4
Asset Tag: Unknown
Part Number: 0x4D332036384C3332323344544D2D43423320
Handle 0x001A, DMI type 20, 19 bytes
Memory Device Mapped Address
Starting Address: 0x00030000000
Ending Address: 0x0003FFFFFFF
Range Size: 256 MB
Physical Device Handle: 0x0019
Memory Array Mapped Address Handle: 0x001B
Partition Row Position: 2
Interleave Position: 2
Interleaved Data Depth: 1
Handle 0x001B, DMI type 19, 15 bytes
Memory Array Mapped Address
Starting Address: 0x00000000000
Ending Address: 0x0003FFFFFFF
Range Size: 1 GB
Physical Array Handle: 0x0012
Partition Width: 4
В Rosa Desktop существует два вида интерфейса: графический, т.е. управление с помощью графических кнопок, меню , панелей, окон. И еще - интерфейс командной строки, т.е. управление с помощью команд. Команды состоят из букв, цифр, символов, набираются построчно, выполняются после нажатия клавиши Enter. Если в работе с графическим интерфейсом главную роль играет мышь , то в работе с командной строкой главную роль играет клавиатура. В некотором смысле консоль - это сочетание экрана монитора и клавиатуры. Консоль часто отождествляют с терминалом.
Терминал - графическая программа эмулирующая консоль. Такие программы позволяют, не выходя из графического режима, выполнять команды. Терминал по сравнению с консолью имеет дополнительный функционал.
Многие задачи в Rosa Desktop проще и быстрее выполнять с помощью консольных команд Linux (без использования KDE). Так, систему удобно обновлять именно через консоль ( терминал ).
В РОСА программное обеспечение распространяется в виде пакетов. Управление установкой, удалением и обновлением пакетов в системе занимается менеджер пакетов - urpmi. Пакеты обычно хранятся в специальных хранилищах, которые называются репозиториями или источниками. Чтобы установить программу, нужно установить пакет, который содержит эту программу, а менеджер пакетов возьмёт на себя всю работу по установке пакетов.
Проделаем обновление системы с помощью командной строки. Найдите консоль в Приложениях ( рис. 5.17).

Запустите терминал и введите "urpmi (пробел и --) auto-select (пробел и --) auto-update", затем нажмите на Enter ( рис. 5.18).
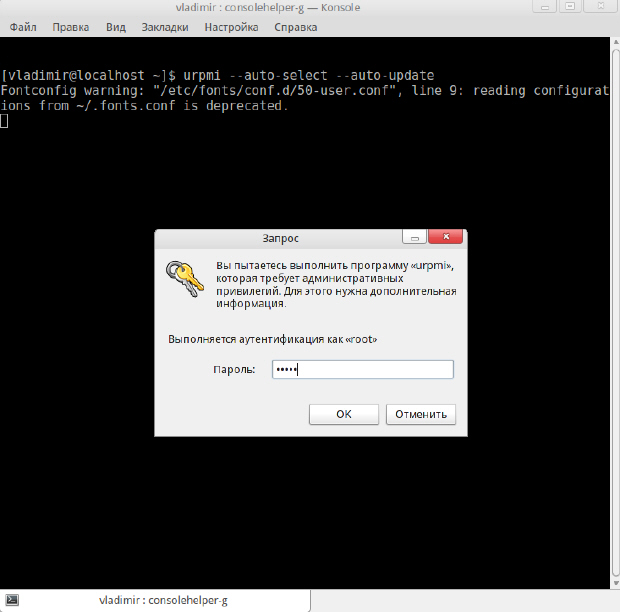
увеличить изображение
Рис. 5.18. Пример правильного ввода команды в консоль
Далее введите пароль root (символы показываются точками), у нас это 12345 и снова нажмите на Enter. Начнется поиск обновлений, если консоль запросит согласия на обновления, то введите "y" (yes). Начнется обновление системы, в процессе которого вам будут заданы простые вопросы, на которые нужно ответить. Когда снова появиться строка типа [user@название ПК
Как океан отличает Землю от других планет солнечной системы, так URPMI отличает Mageia от других дистрибутивов операционной системы GNU/Linux.
К "другим" мы конечно же не относим ближайших родственников Магии - маму Мандриву и сестрёнку Росу.
Труднопроизносимое название urpmi расшифровывается довольно прозаично - User RedHat Package Manager Installer, то есть, пользовательский установщик файлов формата Менеджера пакетов компании Red Hat. urpmi был разработан Паскалем Риго (Pascal Rigaux) для снятия обнаруженных в программе RPM ограничений на установку пакетов. В настоящее время (2013 год) поддержку этой программы в Mageia осуществляет Тьери Виньо (Thierry Vignaud), ранее курировавший в Mandriva такие программы как rpmdrake , drakx и др.
Содержание
- ПО - программное обеспечение
- RPM - файлы пакетов ПО в формате .rpm
- Репозиторий - хранилище источников ПО
Пакеты и источники ПО
Основная задача набора утилит urpmi - простая и ясная загрузка и установка RPM пакетов.
Часто пакеты программ зависят друг от друга; urpmi способен распознать эти зависимости, загрузить недостающие пакеты, если это необходимо, и удалить конфликтующие пакеты, если такие обнаружатся.
urpmi получает список доступных RPM и сами RPM из источников ПО. Можно сказать, что источник ПО идентифицируется именем и адресом URL. В настоящее время поддерживаются источники ПО следующих типов:
Установка и обновление пакетов
Утилитой установки RPM является urpmi . Его базовый синтаксис таков:
Эта команда предлагает urpmi найти и установить перечисленные пакеты, а также их не упомянутые зависимости, из ранее подключённых к системе источников ПО. В процессе работы urpmi может задать несколько вопросов. А именно: требуется ли обновление каких-то пакетов или можно ли установить какие-то новые (не упомянутые) пакеты и попросит подтверждения. Кроме того, urpmi попросит подтверждения, если какие-то пакеты необходимо удалить из-за конфликтов с запрашиваемыми пакетами. В некоторых случаях urpmi может предложить выбрать из нескольких альтернативных пакетов, обозначив по умолчанию "лучший" из них.
Очень полезная функция urpmi - обновление до последней версии всех установленных в системе и имеющихся в источнике ПО пакетов. Это достигается следующей командой:
urpmi может также помочь в непосредственной установке файлов RPM. Вместо команды " rpm -i foobar.rpm ", можно передать утилите urpmi полный путь к rpm-файлу и она постарается учесть все необходимые зависимости.
--auto автоматический режим - urpmi не будет задавать вопросов и будет сам выбирать из альтернатив те, что заданы по умолчанию. --test проверяет возможность установки пакетов, но реально ничего не устанавливает и ничего не меняет в системе. --media источник1. источникN использует только указанные источники ПО вместо всех ранее подключённых к системе.
Кроме того, можно указать часть имени источника и urpmi выберет все источники, содержащие эту подстроку. Например,
будет искать во всех источниках, имена которых содержат "updates".
Полный перечень поддерживаемых urpmi параметров см. в man urpmi(8) .
Удаление пакетов
Утилита удаления RPM - urpme . Команда
попытается удалить указанные пакеты и пакеты, зависимые от них. Она откажется удалять только "важные" пакеты (например, составляющие основу системы).
urpme может обнаружить более не используемые пакеты: например, библиотеки, к которым не обращается ни одно приложение. Для удаления таких пакетов используйте команду
Перечень всех поддерживаемых параметров urpme см. в man urpme(8) .
Подключение источника ПО
Поддерживаются следующие URL:
Если источник ПО требует идентификации, следует использовать обычный синтаксис URL:
Удаление источника ПО
Это совсем просто:
Обновление источников ПО
Некоторые источники ПО никогда не меняются, например, CD-ROM и подобные. Но большая их часть постоянно обновляется и увеличивается в размерах; добавляются новые RPM и удаляются устаревшие. Поэтому, перед их использованием, время от времени надо как-то указывать urpmi , что содержимое источников ПО возможно изменилось. Таким указанием служит утилита urpmi.update . С её помощью можно обновить все источники ПО:
или только указанные:
Создание собственного источника ПО
Простейший способ создать собственный источник ПО - воспользоваться утилитой urpmi.addmedia . Учтите, что она предназначена для небольшого количества файлов RPM, находящихся на диске или на подмонтированном коллективном сетевом диске NFS. Если ваши RPM-файлы находятся в каталоге /var/my-rpms, просто введите команду:
Если же необходимо создать источник ПО, содержащий большое количество RPM или он должен быть размещён на коллективном сервере, необходимо воспользоваться утилитой gendistrib из пакета rpmtools . Эта утилита способна сгенерировать зеркальное дерево для одного или нескольких источников ПО.
Типичный репозиторий в каталоге суперпользователя /ROOT/ имеет следующую структуру (здесь два источника ПО обозначены именами "first" и "second"):
RPM-файлы размещаются в подкаталогах first и second . Метаданные репозитория находятся в каталоге media_info верхнего уровня. Метаданные источников ПО находятся в подкаталогах first/media_info и second/media_info .
Метаданные источника ПО состоят из сжатого программой gzip файла hdlist.cz со списком заголовков RPM-файлов источника ПО; из файла synthesis.hdlist.cz , намного меньшего, чем hdlist , в котором содержится информация, нужная только urpmi для разрешения зависимостей и иногда, если RPM-файлы подписаны, из файла pubkey (таким образом urpmi может проверить, имеет ли загружаемый RPM ключ к этому источнику ПО).
Перед использованием gendistrib , необходимо создать файл media_info/media.cfg , в котором дать описание этого репозитория. Синтакс этого файла знаком вам по файлам .ini . Он содержит по одной секции на каждый источник ПО. Например,
- first - имя каталога
- hdlist_first.cz - имя файла hdlist , который будет в результате создан (имя должно заканчиваться на ".cz")
- "name font-family: courier, monospace; color: blue;">gendistrib с /ROOT/ каталогом в качестве параметра. Программа сгенерирует все необходимые файлы для полной функциональности репозитория.
Более полную информацию см. man gendistrib(1) .
urpmf
Утилита urpmf похожа по функциям на grep , только применительно к базе данных urpmi (коллекции RPM в источнике ПО). По умолчанию поиск установлен на имена файлов внутри пакетов, но различные параметры позволяют переключать поиск на имена пакетов, на зависимые и зависящие пакеты, на описания RPM и так далее (или на несколько из них вместе). Например, найти все пакеты, начинающиеся с "apache-":
Знак ^ в стандартном регулярном выражении означает начало строки.
Перечень всех параметров и дополнительные примеры см. в man urpmf(8) .
urpmq
Утилита urpmq предназначена для запросов к базе данных urpmi. Она работает в различных режимах. Вот несколько примеров:
покажет описание пакета (как rpm -qi делает то же для установленных пакетов). Параметр "--summary" покажет ту же информацию, но в сокращённом виде не длиннее одной строки.
покажет адрес URL, откуда может быть затребован пакет.
покажет перечень RPM, которые требуются для этого пакета (рекурсивно).
И наоборот, команда
покажет список всех RPM, для которых требуется этот пакет.
Все параметры см. в man urpmq(8) .
Утилита urpmi-parallel - полезное дополнение к urpmi для установки пакетов по сети: она позволяет urpmi работать с заданном количестве машин-клиентов параллельно. Точнее, машина, на которой вы запускаете команду (сервер), проверяет её результаты по очереди на каждой машине заданной группы (клиентах), загружает необходимые всей группе пакеты, раздаёт соответствующие пакеты на каждую машину, затем вызывает urpmi каждой машины для окончательной установки.
Разумеется, urpmi должен быть установлен на всех клиентских машинах, но подключать источники ПО к каждой из них не обязательно.
Эта утилита требует выполнения следующих шагов:
- Убедиться, что возможно ssh-подключение сервера к каждой клиентской машине с правами root'а (чтобы избежать многократного ввода пароля, можно воспользоваться командой ssh-add на сервере).
- Установить на сервере urpmi-parallel-ssh и urpmi-parallel-ka-run или одну из них. Первый плагин использует простой ssh для передачи команд на другие машины, второй использует ka-run, адаптированный для кластеров эффективный метод параллелизации поверх удалённой оболочки (rsh или ssh).
- Отредактировать файл /etc/urpmi/parallel.cfg , чтобы он выглядел примерно так: "mynetwork:ssh:host1:host2:host3". В этой строке "mynetwork" - название сетевого соединения, "ssh" - режим установки (для режима "ka-run" см. установки файла /etc/urpmi/parallel.cfg в man urpmi.files(5) ), "hostN" - имена всех клиентских машин в вашей сети. В этот список можете добавить "localhost".
- Запустить urpmi :

С чего начать работу в Rosa Fresh Linux и изучение линукс
Многие новички, которые приходят в группу Rosa ВК часто задают вопросы: «Что же такое Rosa?», «С чего начать изучение Rosa Linux и линукс в целом?»
Давайте поговорим об этой интересной теме.
Знакомство с дистрибутивом Rosa Fresh рекомендуется начать с ознакомления с историей и описанием Rosa, а так же с просмотра небольшого видеообзора:
Rosa Fresh R11 доступна с несколькими рабочими средами: KDE4, KDE5 Plasma, XFCE, LxQT
Для записи установочного образа Rosa используйте фирменную утилиту Rosa Image Writer, чтобы правильно записать образ на usb-флешку.
После установки обновите систему Rosa, когда автоматически будет предложено скачать и установить новые обновления. После установки всех обновлений перезагрузите ПК.
Далее установите видеодрайвер для повышения быстродействия видеосистемы.
Если у вас видеокарта Nvidia, то после установки и первого обновления Rosa Fresh нужно установить закрытый (проприетарный) видеодрайвер, поскольку он самый производительный в 3D. Установка видеодрайвера выполняется графической утилитой в настройках дистрибутива.
Если у вас видеокарта Amd Radeon, тогда в процессе установки Rosa уже был установлен свободный видеодрайвер radeon. Свободный видеодрайвер обеспечивает хорошую производительность видеокарт amd radeon новых поколений.
В процессе работы с дистрибутивом Rosa Fresh, может возникнуть необходимость установить дополнительные нужные для работы программы. В Rosa используется собственный репозиторий (централизованное хранилище программного обеспечения), в котором доступно к установке тысячи программ. Подключение сторонних репозиториев, как в Ubuntu, в Rosa не практикуется.
Процесс установки программ очень простой, достаточно войти в Параметры системы и запустить приложение «Установка и удаление программ».
Откроется окно Управление программами, где в строке поиска вы вводите имя на английском языке (можно часть имени) и нажимаете Поиск. В появившемся списке находите нужную вам программу, кликнете на ней два раза мышкой, чтобы поставить галочку, и нажимаете Выполнить. Процесс установки программы пошел, вы соглашаетесь с предложенным описанием и ждете завершения установки программы. После установки программы закрываете менеджер программ.
Более опытным пользователям рекомендуется использовать командную строку в терминале для установки и удаления программ.
Читайте также: