
Fanuc подключение к компьютеру
Обновлено: 04.07.2024
Инструкция по работе DNC-терминала с системой
Fanuc 6M
При работе с Fanuc 6M DNC-терминал можно подключать как к порту RS-232, так и вместо ФСУ. Если по RS-232 возможен как ввод, так и вывод данных, то подключение терминала вместо ФСУ позволяет использовать покадровый режим (“работа с ленты”).
1. Параметры УЧПУ
1.1. Порядок установки параметров
Установка параметров УЧПУ выполняется по следующей схеме:
1.1.1. Установить выключатель на главной печатной плате в положение ENABLE (Запись разрешена). На панели индикации зажигается лампа сбоя.
Выключатель в верхней части печатной платы должен быть оставлен в выключенном положении.
1.1.2. Установить переключатель режимов на пульте управления в режим РВИ.
1.1.3. Нажать кнопку PARAM.
1.1.4. Нажатием кнопок N, <Номер устанавливаемого параметра>, INPUT, набирается страница номера устанавливаемого параметра и курсор будет под данным номером (с помощью кнопок PAGE, CURSOR также производится подобная операция).
1.1.5. Установить новые параметры нажатием кнопок P, <Установленные данные>, INPUT. Путем нажатия клавиши CAN можно аннулировать ошибочные данные.
1.1.6. После установки и проверки всех параметров установить выключатель на главной печатной плате в положение OFF (DISABLE — Запрет записи).
1.2. Канал RS-232
Для работы с DNC-терминалом по каналу RS-232 необходимо выполнить следующие действия на УЧПУ:
1.2.1. В режиме SET выбрать ручной ввод информации и выставить следующие значения:
- INPUT DEVICE 1 = 0 или 1
- INPUT DEVICE 2 = 1
1.2.2. В режиме PARAM:
- Parameter N 340 = 2
- Parameter N 341 = 2
Для установки скорости 9600 бит/с и одного стопового бита:
- Parameter N 310 = 0000 1010
- Parameter N 311 = 0000 1010
- Parameter N 312 = 0000 1010
- Parameter N 313 = 0000 1010
Для скорости 4800 бит/с:
- Parameter N 310 = 0000 1001
- Parameter N 311 = 0000 1001
- Parameter N 312 = 0000 1001
- Parameter N 313 = 0000 1001
Для скорости 2400 бит/с:
- Parameter N 310 = 0000 1000
- Parameter N 311 = 0000 1000
- Parameter N 312 = 0000 1000
- Parameter N 313 = 0000 1000
1.3. Канал ИРПР
Для работы с DNC-терминалом по каналу ИРПР (подключение к разъему “ФСУ”) необходимо в режиме SET выставить следующие значения:
- INPUT DEVICE 1 = 0
- INPUT DEVICE 2 = 0
2. Обмен данными с УЧПУ (RS-232)
2.1. Кабель
Кабель для обмена данными по каналу RS232 (кабель FNC 6M.RS232)

| К УЧПУ (DB-25M) | (DB-9F) | Комментарий | ||
| Контакт | Сигнал | Контакт | Сигнал | |
| 1 | Соединить с экранирующей оплеткой | |||
| 2 | TX | 2 | RX | |
| 3 | RX | 3 | TX | |
| 4 | RTS | 8 | CTS | |
| 5 | CTS | 7 | RTS | |
| 7 | GND | 5 | GND | |
| 20 6 8 | DTR DSP | Соединить перемычкой | ||
Примечание: Для информации о том, в каких еще системах используется данный кабель, см. таблицу взаимозаменяемости кабелей.
2.2. Параметры DNC (ввод в УЧПУ)
Параметры для ввода в УЧПУ по каналу RS232 (параметры FNC 6M — ввод):
2.3. Параметры DNC (вывод из УЧПУ)
Параметры для вывода из УЧПУ по каналу RS232 (параметры FNC 6M — вывод):
2.4. Работа с УЧПУ
Для ввода данных в УЧПУ:
- Войти в режим редактирования (переключатель режимов работы должен стоять в положении "EDIT" или
- Повернуть ключ, разблокирующий память. Вместо ключа на некоторых стойках может использоваться тумблер, расположенный на отдельном блоке
- Если на панели управления есть кнопка с символом , то она должна гореть (в противном случае следует ее нажать)
- Нажать кнопку RESET
- Нажать клавишу "O" (о-большое) и ввести номер программы
- После выполнения необходимых операций на DNC-терминале нажать на панели управления УЧПУ кнопку READ.
Для вывода данных из УЧПУ:
- Войти в режим редактирования (переключатель режимов работы должен стоять в положении "EDIT" или
- Нажать кнопку RESET
- Нажать клавишу "O" (о-большое) и ввести номер программы
- После выполнения необходимых операций на DNC-терминале нажать на панели управления УЧПУ кнопку PUNCH.
3. Ввод данных в УЧПУ (ФСУ)
3.1. Кабель
Кабель для ввода данных в УЧПУ подключается вместо ФСУ к разъему CAT на основной плате внутри стойки (кабель FNC 6M.ИРПР.ввод)

| К УЧПУ | К УЧПУ (IDC-50F) | К DNC-терминалу (DB-25M) | Комментарий | |||
| Контакт | Сигнал | Контакт | Сигнал | Контакт | Сигнал | |
| 1 | P1 | A1 | P1 | 13 | Out D1 | |
| 3 | P2 | A2 | P2 | 12 | Out D2 | |
| 5 | P3 | A3 | P3 | 11 | Out D3 | |
| 7 | P4 | A4 | P4 | 10 | Out D4 | |
| 9 | P5 | A5 | P5 | 9 | Out D5 | |
| 11 | P6 | A6 | P6 | 8 | Out D6 | |
| 13 | P7 | A7 | P7 | 7 | Out D7 | |
| 15 | P8 | A8 | P8 | 6 | Out D8 | |
| 17 | PS | A9 | P9 | 5 | SI | |
| 25 | FOT | A13 | FOT | 4 | Start | |
| 21 | ROT | A11 | ROT | 3 | Ready | |
| 3 | Соединить перемычкой | |||||
| 24 25 | +5V | Соединить перемычкой | ||||
| 2, 4, 6, 8, 10, 12, 14, 16, 18, 20, 24, 26 | GND | B1-B25 | GND | 1 14 | GND | |
Наименование контактов для разъема IDC-50F:
| От ФСУ | * REEL | с перемоткой (бобина) |
| * TER | PTR ERR | |
| ROT | READY | |
| *RWT | перемотка | |
| SP | синхронизация | |
| К ФСУ | FOT | feed forward |
| * RVT | реверс | |
| OPT | operate | |
| * RWDT | rewindd | |
| CLT | clear PRT | |
| CLR | clear | |
| * ALM | alarm | |
| RMT | remote |
Примечание: Для информации о том, в каких еще системах используется данный кабель, см. таблицу взаимозаменяемости кабелей.
Подключение кабеля к разъему "CAT":
Подключение кабеля к системе Fanuc 6 по каналу фотосчитывающего устройства имеет некоторые особенности. Проблема состоит в том, что разъем на кабеле от DNC-терминала не имеет ключа и этот кабель может быть вставлен в разъем "CAT" двояко. Чтобы не спалить последовательные порты на УЧПУ и на DNC-терминале, необходимо правильно установить кабель DNC-терминала в разъем "CAT".
Прежде, чем отключить кабель ФСУ, необходимо запомнить, как он был подключен. Это можно определить по красной полосе, идущей по одному из краев кабеля (либо эта полоса проходит слева, либо справа). Кабель от DNC-терминала должен быть подключен таким образом, чтобы красная маркеровочная полоса на нем была с той же стороны, что и у штатного кабеля ФСУ. Это обеспечит правильную установку кабеля DNC-терминала.
3.2. Параметры DNC
Параметры для ввода данных УЧПУ при подключении вместо ФСУ (параметры FNC 6M PAR — ввод):
4. Управляющие программы
Ниже приведен пример оформления управляющей программы для обмена данными между DNC-терминалом и УЧПУ. Комментариями отмечены важные моменты оформления.
We Do What We Must, Because We Can!Причинять добро, наносить пользу и подвергать ласке. тоже как вариант,но на какой барахолке ж такой найти ) Бывают и переходники нормальные, но стоят довольно дорого. да в принципе не столько важна стоимость-важен результат

Например вот такой
я извиняюсь конечно но,он то мне зачем?устраивает и метр растояния,закачал программу-привязку сделал-запустил-ура деталь минус время на ручной ввод
смысл вопроса - как настроить станок на прием программы с USB компа
где эта кнопка )) т.е в SolidCAM сгенерировал G коды,через DNC хочу передать,но нет связи со станком
Приношу извинения форуму - но на сапр2000 пошукайте инструкцию.
Там комплекс задач.
включение порта на фануке, настройка порта на фануке, обратите внимание - полный ли порт, какие сигналы из стандарта RS-232 используются.
USB2COM редко бывает полноценный(если он не самодельный на FTDI или ещё на чём). Поэтому и пользуют WiFi2COM или Ethernet2COM. Из мне известных и опробованных WizFi 630, Lantronix XPort позволяют организовать обмен с аппаратным контролем потока. Только к ним преобразователи нужны. Да и настройка не тривиальная задача - нужно понимать особенности передачи данных по Ethernet и RS232.
Из готовых решений - можно найти готовые модули ZigBee. Есть поделки предназначенные именно для низкоскоростной связи в условии индустриальных помех. В частности модбас к частотнику через зигби в качестве эксперимента делал. На Telegesis'ах.
Чудес не бывает. Бывает недопонимание субъектом процессов, часто осложнённое отсутствием самокритики и верой в непогрешимость своей системы знаний. Плохо когда ЧСВ ещё раздуто до степени судьи.народ вы чЁ. человек спрашивает о соединии станка с лаптем на растоянии метра! а вы ему Ethernet, RS485, WiFi, ZigBee, modbus, Telegesis.
4uwa4e4
опиши проблему, какой адаптер, какой софт, что делаеш на станке для приема проги.. больше информации!
но как сказали проблема скорее всего в адаптере, попробуй купи другой подороже, в идеале на основе чипа FTDI (попадаются редко в продаже) вообще проблем не делали (в основном паяю сам).
попробуй одаптеры Dynamode, работал с ними сутки! со станками окума и матсура(yaskawa) щас лежат как "пожарный вариант"
сам работаю через PCI адаптер на CIMCO Edit, на оба станка.
Я этот вариант и предложил с чистой совестью, чтоб не было плясок с бубном и последующего выяснения, что там оказывается нужна поддержка например аппаратного контроля ЦТС или еще чего, а вот в этой перетыке ее нету.
Пожалуй, наибольший интерес в использовании
манипуляторов заключается в возможности
реализовать для них разнообразные законы
управления исходя из собственных
соображений. В предыдущей статье был
описан процесс первичной настройки
манипулятора. Ниже будет описан способ
управления манипулятором по собственному
закону управления.
Коротко о устройстве контроллера манипулятора
Контроллер манипулятора представляет из себя компьютер с подключенными периферийными устройствами, отвечающими индустриальным задачам, и сервоуселитялями для управления приводами манипулятора.
Поскольку мы имеем дело с индустриальным оборудованием, просто так напрямую подключится к двигателям не получится: производитель серьёзно заботится о безопасности. Управление с ПК производится посредством отправки команд на контроллер манипулятора.
В данном случае робот поставляется со стандартной прошивкой. Если требуется какая либо программная опция, нужно связаться с региональной техподдержкой: она выставит КП, счёт, и после его оплаты добавит необходимое в образ робота, отправленный вами.
После получения обновлённого образа системы контроллера остаётся только восстановить робота из прошивки.
Данные о ПО оборудования,
рассматриваемого в статье:
Ревизия iPendant : декабрь 2017
Версия ПО контроллера: V8.30P/36
Bootloader 1.2
Насколько просто начать управлять манипулятором с ПК?
Вообще говоря, трудностей не должно возникнуть. У авторов имеется задача управления манипулятором из-под ROS. Хотя Fanuc поддерживает ROS, для его успешной установки требуется установка программной опции R648 User Socket Messaging. Данная опция платная.
Существует два основных способов передачи управляющих команд и данных на контроллер: через Ethernet или RS232.
Стоит отметить, что при подключении контроллера к сети на нём запускается web-сервер, который предоставляет базовый функционал для взаимодействия с системой.
Было решено попробовать обойтись без покупки дополнительной опции и реализовать управление манипулятором иным образом.
Управление без дополнительных программных опций
При поиски информации об обходе системы было найдено решение Венгерского центра интеллектуальной робототехники. Оно позволяет управлять движением манипулятора с помощью Get запросов в локальной сети посредством записи настроек и координат в регистры контроллера и исполнением KAREL программы перемещения в точку. Для этого
также требуется запуск программы мониторинга состояния системы: она сбрасывает fuse-биты, отвечающие за блокировку движения. Имеется возможность запуска заранее загруженных KAREL программ.
Для компиляции программ из репозитория требуется RoboGuide. Бесплатную версию на 30 дней можно запросить у регионального представителя Fanuc.
Примечание: для управления роботом в СК, связанной с землёй или рабочем инструментом, требуется
перевести пятую степень свободы J5 в положение, отличное от нулевого, во избежание возникновения ошибки MONT-023.



Первый запуск станка с ЧПУ. Пошаговая инструкция.
Данная инструкция справедлива для станков с фанерной рамой серии "Моделист", настольных алюминиевых станков, а так же станков средних размеров из алюминиевого конструкционного профиля с передачей на ШВП.
Инструкция по запуску станков больших размеров на реечной передаче находится по ссылке:
ШАГ 1. Подключение контроллера.
1.1 Произвести подключение контролера шаговых двигателей к станку, согласно имеющейся маркировки на проводах и табличке над клеммниками контроллера. Рисунок 1.
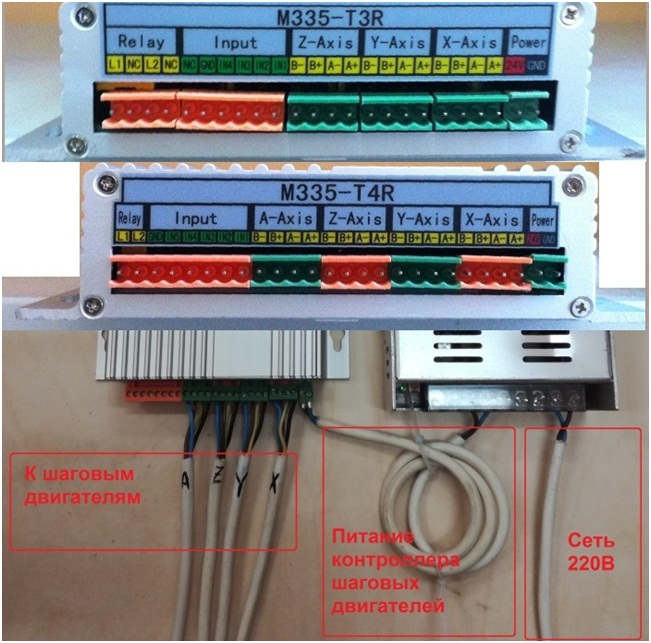
Рисунок 1.подключение контролера шаговых двигателей
1.2 Подключить контроллер шаговых двигателей к компьютеру.

Рисунок 2 –подключение контроллера шаговых двигателей к LPT- порту компьютера.
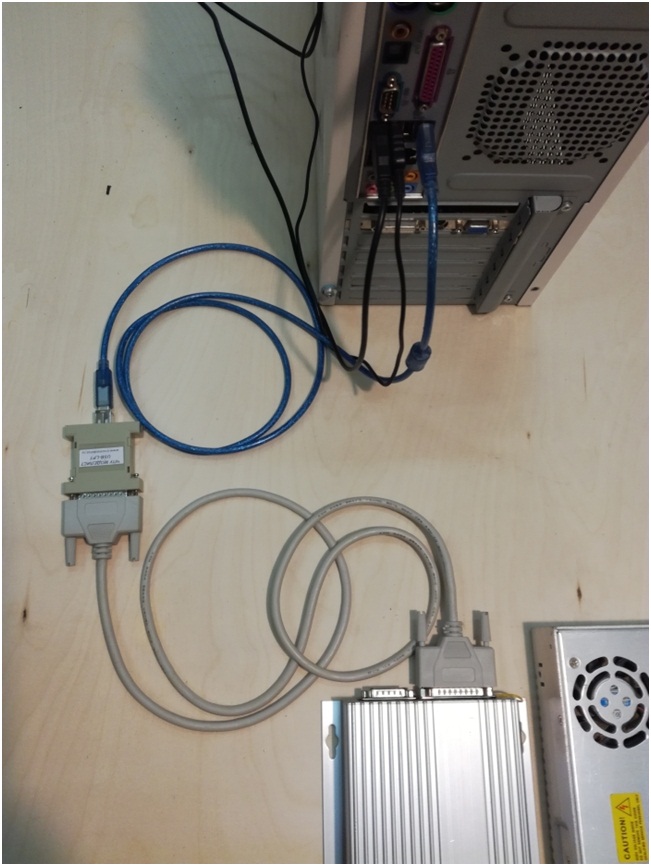
1.3 При использовании переходника USB-LPT произвести подключение согласно рисункам 3 и 4.
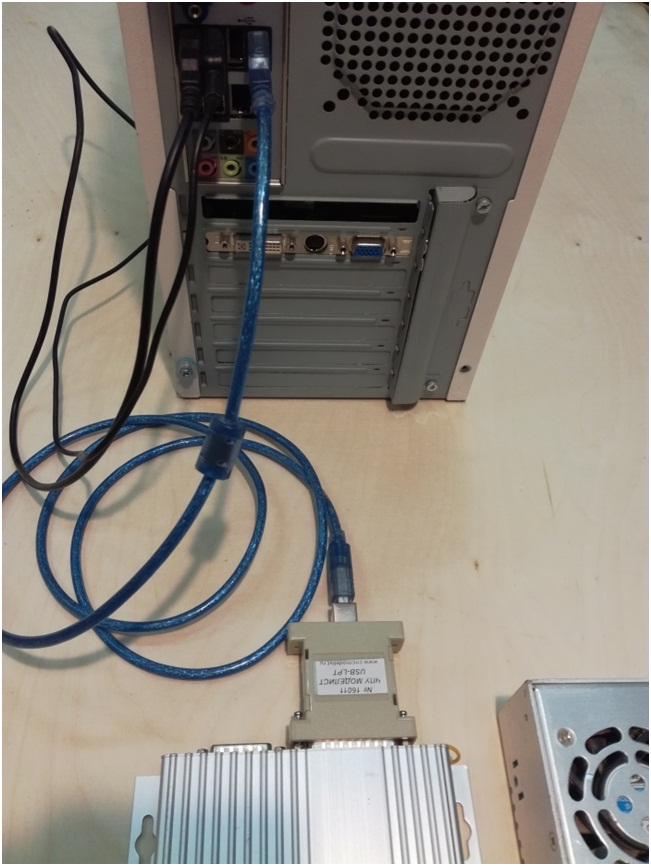
Рекомендуемый вариант подключения рисунок 3.
ШАГ 2. Подготовка шпинделя.
Если на станок установлен шпиндель жидкостного охлаждения - произведите сборку системы охлаждения, согласно соответствующей инструкции. Инструкция высылается по запросу на электронную почту.
ШАГ 3. Подготовка ПК.
3.1 ВНИМАНИЕ ВАЖНО! Для управления станком непосредственно через LPT порт невозможно использование компьютеров с многоядерными процессорами INTEL.
(системные платы Intell имеют в себе средство изменения рабочей частоты процессора при изменении нагрузки на него. При этом все порты тоже испытывают флуктуацию по частоте – как результат, сигнал «плавает», то есть при работе Mach3 происходит изменение частоты сигнала step, что приводит к неравномерности движения рабочего органа станка- дерганью, ударам и даже остановкам)
Для проверки LPT порта 3-4 раза производим переезд в режиме ручного перемещения (с использованием клавиш ← → и↓↑) на полную длину рабочего стола. Движение должно происходить плавно с постоянной скоростью, без дерганья, рывков, ударов и остановок. Если при перемещении происходит локальные изменения скорости движения и/или остановка в процессе движения портала, то для проверки необходимо в пункте меню Config →MotorTuning изменить параметр Velocity уменьшив его в 10 раз. Если изменения скорости движения уменьшатся, а остановки прекратятся, но при этом удары и толчки сохранятся, то данная материнская плата не пригодна для управления станком через LPT-порт.
Для работы непосредственно через LPT порт подходят:
А) только компьютеры с одноядерными процесорами INTEL и любые компьютеры с процессором AMD и только 32 разрядные версии операционной системы windows
Б) любые компьютеры с операционной системой LinuxCNC.
3.2 При работе со станком через USB переходник или Ethernet переходник можно использовать любые компьютеры и любые версии операционной системы Windows. USB переходники должны быть только специализированные, с драйвером под программу Mach3.
3.3 Компьютер для управления станком должен быть отдельно выделенный, без лишних программ. Не устанавливать антивирусы! Оперативной памяти не менее 1ГГб, если видеокарта встроенная то не менее 1,5Гб , процессор от 1ГГц. Перед установкой mach3 переустановите операционную систему, обязательно установите все необходимые системе драйвера, отключите брандмауэр, отключите гашение экрана в настройках электропитания, отключите экранные заставки, отключите файлы подкачки с жестких дисков.
Более подробно о установке и настройке ПО для работы станка необходимо ознакомиться с информацией по следующей ссылке:
Отключение антивирусов и брандмауэра в Windows XP:
3.3.1 Зайдите в Меню пуск, откройте Панель управления.
3.3.2 Откройте Центр обеспечение Безопасности.
3.3.3 Щелкните по Брандмауэр Windows.
3.3.4 В появившемся окне переставьте переключатель на Выключить (не рекомендуется) и нажимаем ОК.
3.3.5 Для отключения предупреждений Windows о безопасности нажмите в окне Центра Обеспечения безопасности windows по ссылке Изменить Способ Оповещения Центром обеспечения безопасности. В появившемся окне уберите все галочки после чего нажмите ОК.
Отключение антивирусов и брандмауэра в Windows 7:
3.3.6 Для отключения брандмауэра его необходимо открыть, что бы его найти воспользуйтесь поиском Windows 7. Откройте меню Пуск и напишите «бра» и выберите простой брандмауэр Windows.
3.3.7 В левой части окошка выбирите Включение и отключение брандмауэра Windows.
3.3.8 В открывшемся окошке вы можете отключить брандмауэр для всех сетей сразу.
3.3.9 После, необходимо выключить службу Брандмауэр Windows. Воспользуйтесь поиском из меню Пуск.
3.3.10 В открывшемся окошке найдите службу Брандмауэр Windows и дважды кликните по ней левой кнопкой мышки . В открывшемся окошке Свойства нажмите Остановить. Затем в поле Тип запуска из выпадающего меню выберите Отключена. Нажмите ОК.
3.3.11 Отредактируйте конфигурацию системы. Откройте Пуск и напишите «кон». Выберите Конфигурация системы. В открывшемся окошке перейдите на вкладку Службы, найдите Брандмауэр Windows. Снимите галочку и нажмите ОК
ШАГ 4. Установка, проверка корректности работы программы, генерирующей G-код.
4.1 Установите на компьютере Mach3.
4.2 Скопируйте в папку Mach 3 расположенную на диске С: профиль станка (файл настроек), присланный по электронной почте, переданный на носителе информации (флешке) или скачанный с сайта.
4.3 Если используется переходник USB-LPT, произведите установку драйверов и плагина согласно статье Подключение контроллера с использованием переходника USB-LPT или руководству по эксплуатации на переходник.
4.4 При использовании платы расширения PCI-LPT, порядок действий также описан в статье "Подключение контроллера с использованием карты PCI LPT".
4.5 Для запуска программы потребуется ярлык «Mach3 Loader», остальные ярлыки можно удалить.

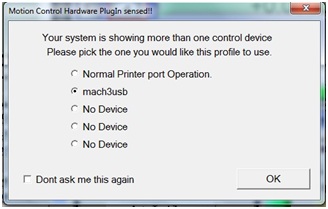
4.6 В открывшемся окне рисунок 5 выберите профиль станка и жмем OK.
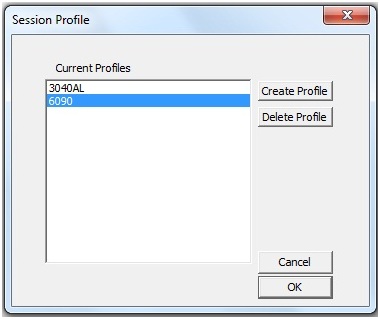
Рисунок 5.
4.7 Выберите источник управления, рисунок 6 при работе с LPT портом или рисунок 7 при работе с переходником USB-LPT.

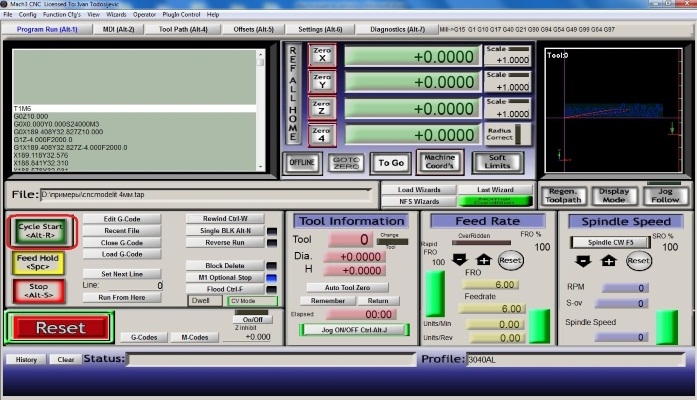
4.8 Загружается главное окно программы Mach3, Рисунок 8.
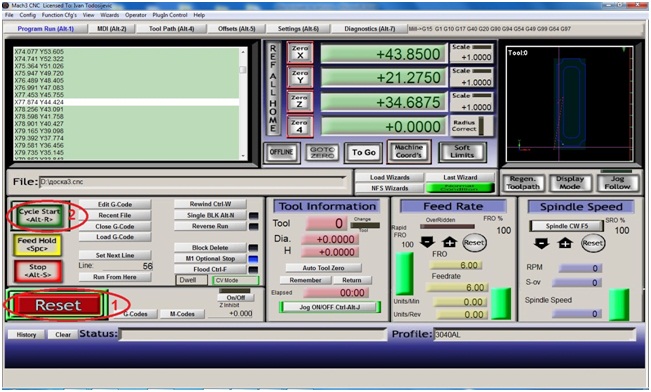
4.9 Включите питание контроллера шаговых двигателей. В главном окне программы MACH3 нажимаем клавишу «Cброс» (Reset) (1), чтобы рамка вокруг неё не мигала и светилась зеленым цветом, рисунок 8. В этот момент шаговые двигатели должны зафиксировать свое положение (послышится щелчок) и слегка зашуметь.
Теперь нажимая на клавиатуре стрелки (влево вправо вверх вниз) наблюдаем на станке перемещения по осям, а на экране изменение координат в полях X Y слева вверху, для перемещения по оси Z кнопки PageUP, PageDown. Также можно вызвать экранный пульт управления перемещением, клавишей "Tab" на клавиатуре вашего компьютера, рисунок 10.

4.10 Если перемещения не происходит, то проверьте корректность установки программы и драйверов.
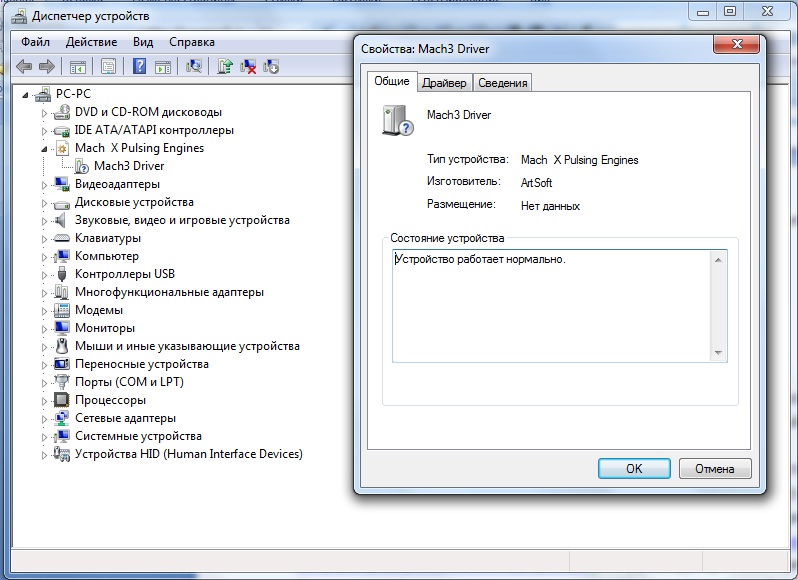
4.10.1 Если используется подключение через LPT- порт, то откройте «Панель управления» - «Диспетчер устройств»- находим Mach3 X Pulsing Engines-свойства. Корректно установленный драйвер - рисунок 12.
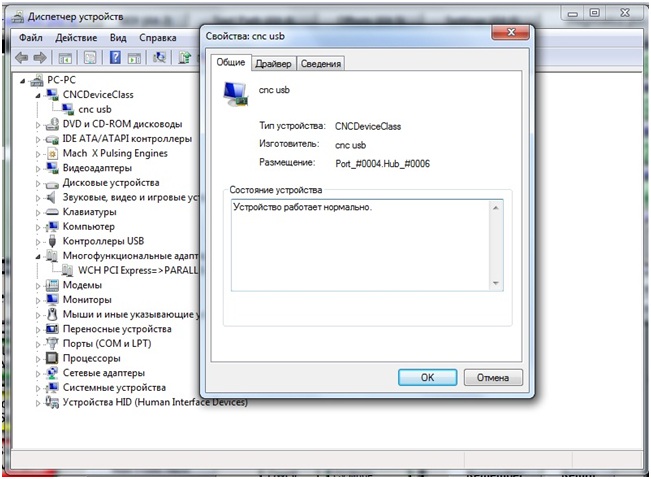
4.10.2 Если используется переходник USB-LPT, то откройте «Панель управления» - «Диспетчер устройств»- найдите CNCDevicesClass-свойства. Корректная установка драйверов и правильное обнаружение операционной системой адаптера –рисунок 13.
4.11 При несовпадение направления перемещения портала станка с направлением стрелок клавиатуры, например при нажатии клавиши «←» инструмент движется в право, изменить направление можно в меню Сonfig->Port and pins->Motor outputs установив галочку в поле DirLowActive напротив нужной оси, рисунок 14.
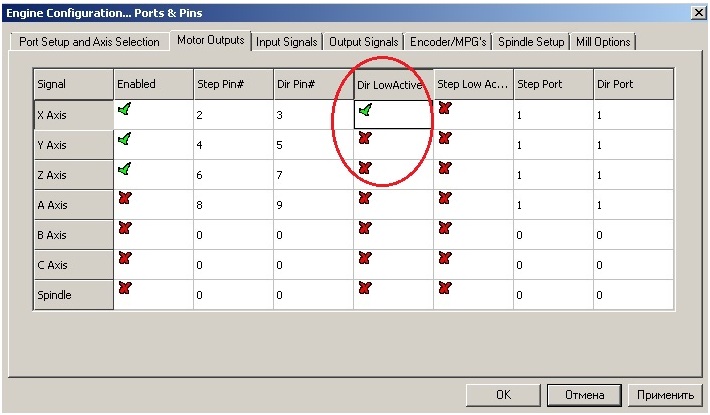
Рисунок 14.
ШАГ 5 Проверка правильности перемещения рабочего инструмента.
Для проверки правильности перемещения рабочего инструмента, необходимо положить на стол линейку и, управляя перемещением с клавиатуры стрелками, проконтролировать совпадение пройденного расстояния по линейке с показаниями в окнах отображения координат MACH3.
5.1 Установите единицами измерения «по умолчанию» -миллиметры: открываем Config->Select Native Units. Mach3 выведет на экран окно с предупреждением о необходимости совпадения единиц измерения установленных в программе и используемых в G-коде. Нажимаем ОК и переходим к окну установки единиц измерения, рисунок 14.
5.2 Для вступления в силу настроек перезагрузите программу. Если далее не планируется использовать при создании управляющих G-кодов дюймовую систему измерения, оставляем метрическую систему для постоянного использования.
Ниже приведён пример проверки настроек для оси Y. Аналогично следует проверить все оси.
5.3 Перемещаем портал и каретку станка до упора на себя и влево –рисунок 15.
5.4 Обнуляем показания цифровых полей с координатами положения портала –нажатием кнопок Zero X, Zero Y, Zero Z, устанавливаем линейку по оси Y, рисунок 16.

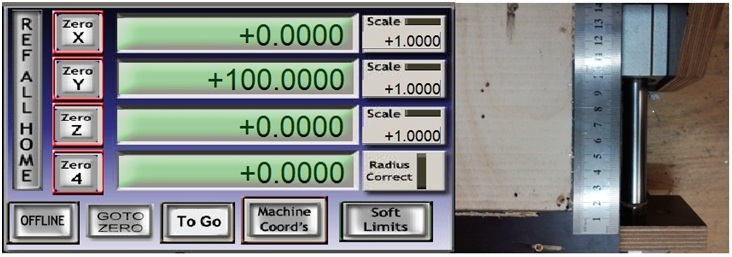
5.5 Клавишей ↑ перемещаем портал на 100 мм по координате цифрового поля. Далее сверяем с фактическим перемещением по линейке - рисунок 17.
5.6 В случае несовпадения реального перемещения с координатами в Mach3, проводим калибровку для соответствующей оси перемещения, как описано в документации программы Mach3.
5.7 Закрываем Mach3 и отключаем питание станка.
ШАГ 6. Установка фрезы.
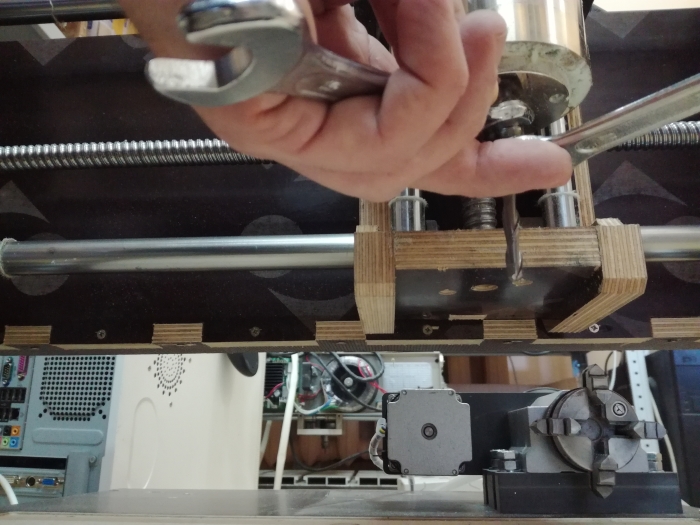
6.1 У станков с использованием шпинделей Kress для установки фрезы используется ключ 17. При установке производится удержание вала нажатием кнопки фиксатора, рисунок 18.
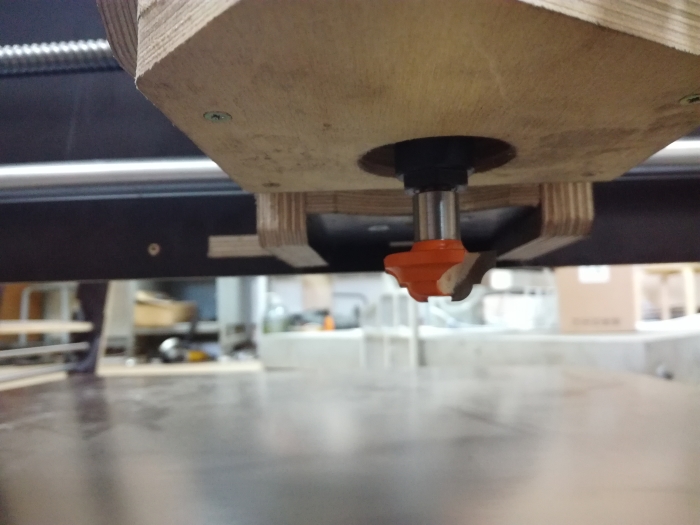
Вращением гайки против часовой стрелки отпускаем цангу, вставляем фрезу и производим зажим хвостовика фрезы в цанге вращением гайки по часовой стрелке. Установленная фреза – рисунок 19.

6.2 Для станков с использованием шпинделей жидкостного охлаждения с цангой ER11 установка фрезы производится с использованием ключей на 13 и 17 рисунки 20..22. Для установки фрезы удерживаем вал шпинделя за лыску на валу ключём на отпускаем зажимную гайку цанги , вставляем фрезу, и производим зажим хвостовика фрезы.

ШАГ 7. Установка заготовки.
7.1 Установка заготовки на рабочий стол станка из профиля с Т-пазом осуществляется металлическими прижимами –рисунок 23.

7.2 При использовании станка с фанерным столом или жертвенным столом из фанеры:
7.2.1 наиболее простой вариант крепления с помощью винтов «саморезов» рисунок 24.

Рисунок 25. Мебельная резьбовая втулка
Рисунок 26. Установленные резьбовые втулки по углам стола
Рисунок 27. Установленные прижимы

Рисунок 28. Закрепленная прижимами заготовка
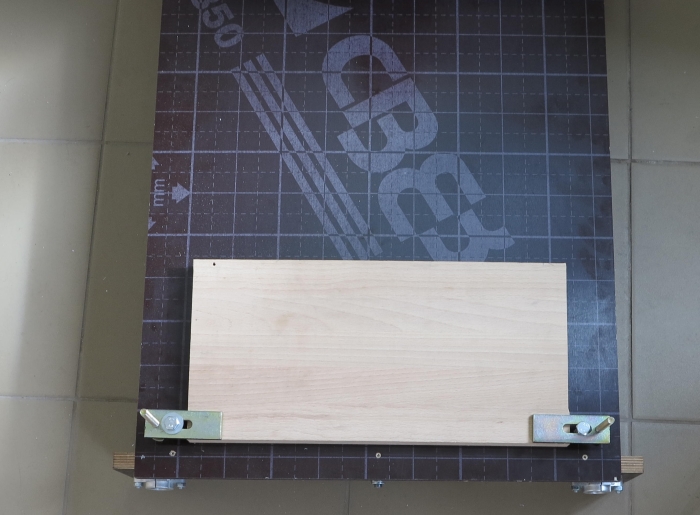
Рисунок 29. Заготовка закрепленная стандартными стальными станочными прижимами
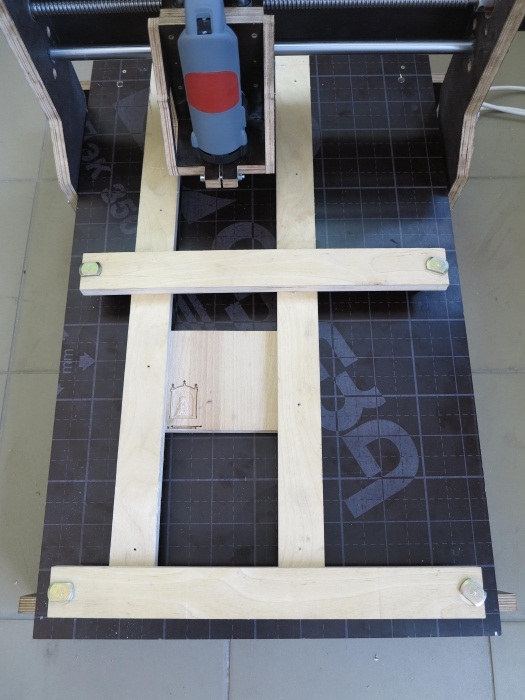
Рисунок 30 Установка дополнительных планок для крепления заготовок любого размера в любом месте стола
ШАГ 8. Установка рабочего органа станка в начальную точку резки.
8.1 Включаем питание станка, запускаем Mach3 и выводим каретку станка в начальную точку резки (как правило это левый нижний угол (вы стоите лицом к передней части станка)) с использованием стрелок на клавиатуре и кнопок “PageUP” и “PageDown”(или виртуальным пультом управления –вызывается кнопкой Tab).
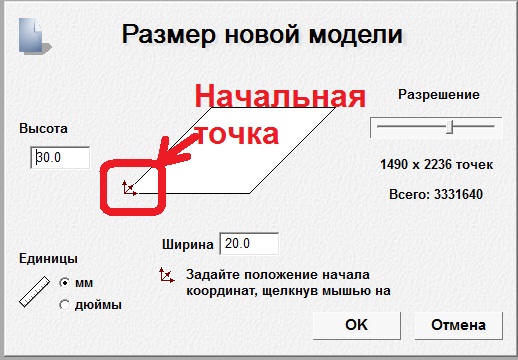
Начальная точка резки определяется при создании проекта –например новой модели в ArtCam, рисунок 31.
8.2 Если имеется в наличии только G-код, то начальную точку можно определить в окне Mach3, загрузив исполняемый файл: File→Load G-Kode. Обнуляем показания цифровых полей с координатами положения портала –нажатием кнопок Zero X, Zero Y, Zero Z курсор в окне визуализации устанавливается в начальную точку.
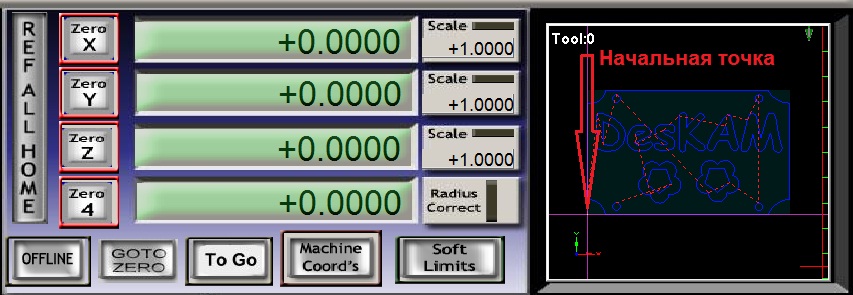
8.3 Управляя вертикальным перемещением шпинделя касаемся нижним торцом фрезы материала заготовки.
Нажатием кнопок Zero X, Zero Y, Zero Z обнуляем программные координаты, рисунки 33, 34.
8.4 Нажатием кнопки “PgUp” поднимаем шпиндель на безопасную высоту -10…15мм над заготовкой.
ШАГ 9. Загружаем G-код: (File→Load G-Kode). Станок готов к запуску .
ШАГ 10. Производим запуск шпинделя.
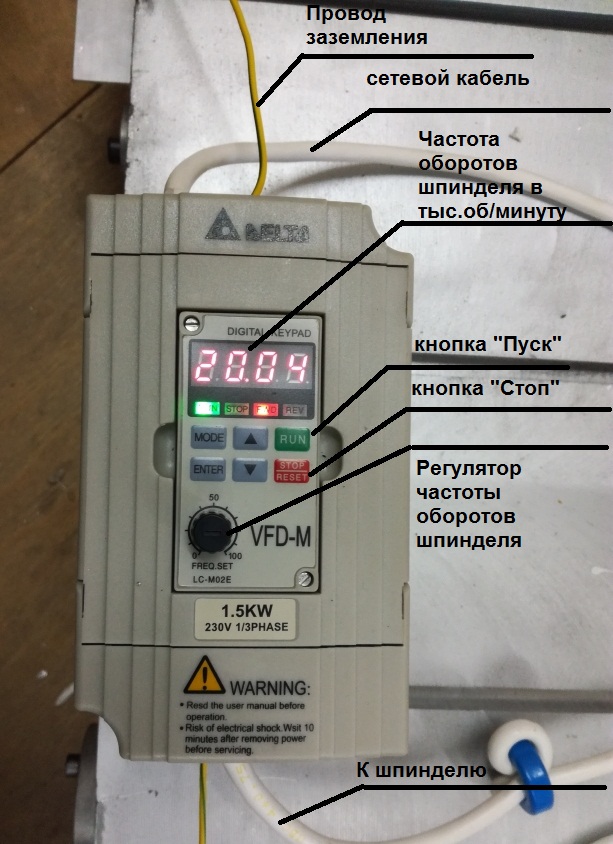
10.2 При работе со шпинделем жидкостного охлаждения рисунок 39 :
- запускаем систему жидкостного охлаждения шпинделя (включаем насос).
- включаем частотный преобразователь.
- вращением потенциометра на лицевой панели частотного преобразователя устанавливаем необходимые обороты вращения шпинделя.
- нажатием кнопки RUN производим запуск шпинделя.
10.3 Далее нажатием кнопки “Cycle Start”в главном окне производим запуск исполняемого G-кода рисунок 40.
11.Активация концевых датчиков
Если концевые датчики на станке установлены, но не активированы, то для включение концевых датчиков в меню программы Mach3
config->Port and Pins->Input Signal установить галочки как показано на рисунках 41 и 42
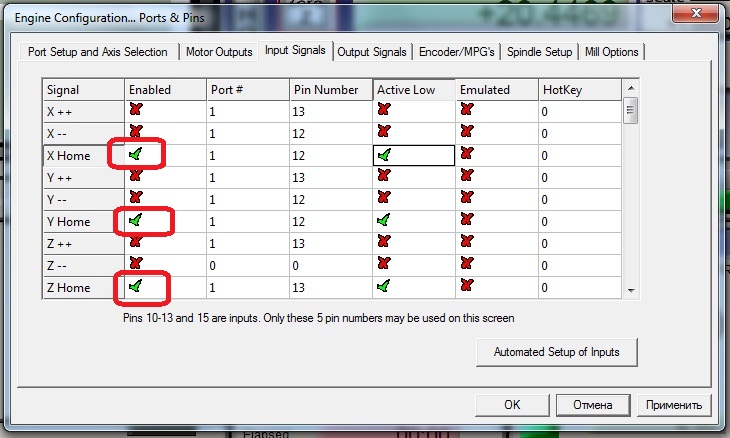
Рисунок 41. Активация концевых выключателей для станков с установленными индуктивными датчиками
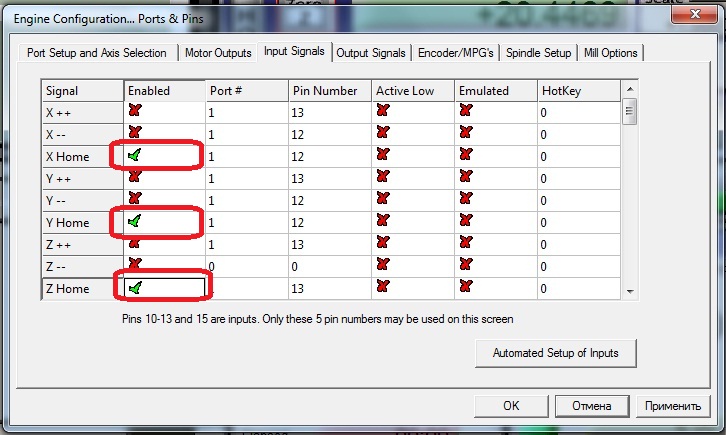
Рисунок 42. Активация концевых выключателей для станков с установленными механическими датчиками
Примечание.
Если на станке установлены концевые выключатели баз, то поиск нулевой точки машинных координат осуществляется нажатием кнопки “Ref All Home”, рисунок 43.
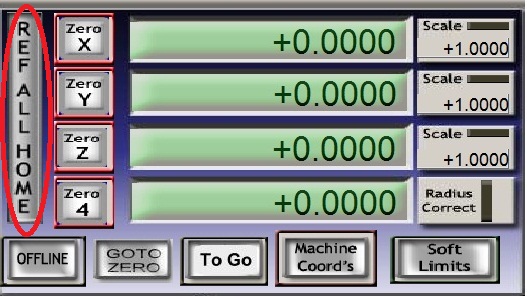
Если концевых выключателей нет, то при нажатии на кнопку “Ref All Home”, происходит обнуление машинных координат.
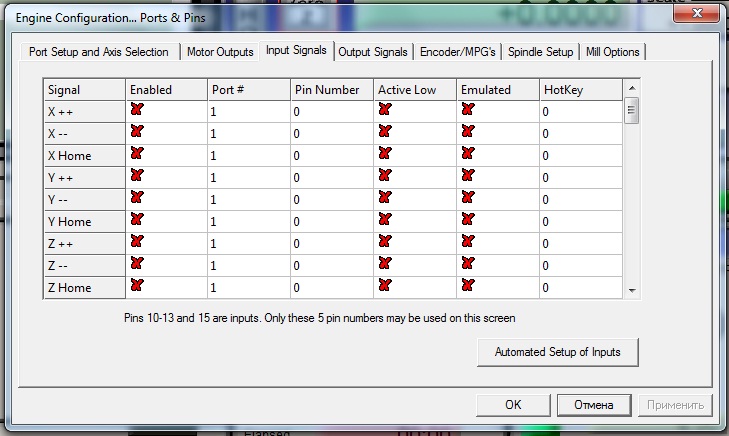
Ели концевые выключатели отсутствуют, то настройки для входов “Home” представлены на рисунке 44.
При работе с адаптером Моделист USB-LPT при отсутствии концевых выключателей порядок обнуления машинных координат выглядит следующим образом:
-клавишами ← и ↓ установите каретку станка в левый нижний угол.
- клавишей и PgUp поднимите шпиндель вверх до упора.
- нажмите кнопку “RESET” на главном экране Mach3.
- извлеките шнур переходника из USB-порта компьютера (не забудьте перед извлечением отключить устройство в системе , так же как обычную флешку)
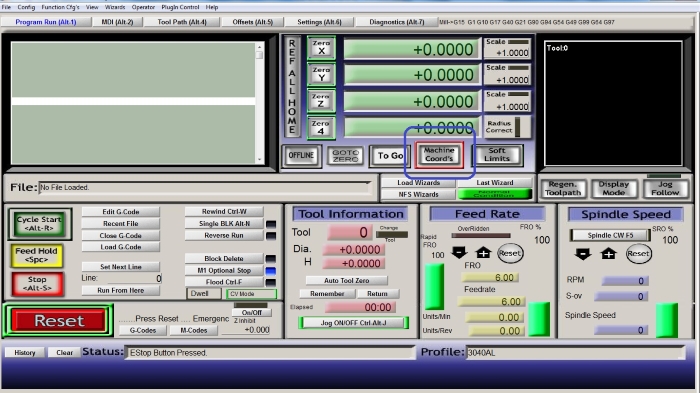
- на главном экране Mach3 переключитесь на отображение машинных координат, для чего нажмите кнопку “Machine Coord’s’, о том что вы находитесь в режиме отображения машинных координат будет сигнализировать красная рамка вокруг кнопки, рисунок 45.
- подключите шнур адаптера к USB-порту и подождите 10-15 секунд, пока Windows обнаружит адаптер.
-нажмите кнопку “RESET” и машинные координаты обнулятся.
- перейдите в режим отображения программных координат, для чего ещё раз нажмите кнопку “Machine Coord’s’, красная рамка вокруг кнопки должна погаснуть.
Читайте также: