
Ft232r usb uart что это
Обновлено: 07.07.2024
Употребляя в своих статьях названия и определения: последовательный порт, serial port, communications port, COM-порт, интерфейс стандарта RS-232 я не был до конца уверен, что употребляю их в правильном контексте. Давайте разберёмся что, зачем, как и почему.
Прежде чем перейти к последовательному порту, чуть-чуть общей теории.
Классификация протоколов
А какие протоколы бывают?
По порядку передачи данных протоколы (шины данных) делятся на:
О последовательных шинах речь пойдет ниже, но пару слов нужно сказать о параллельном соединении
Параллельный протокол передачи данных (параллельная шина данных)
Передача нескольких сигналов с данными одновременно по нескольким параллельным каналам.
В последнее время предпочтение отдается последовательному соединению вместо параллельного, так как экономически более выгодно организовать передачу данных по одному (двум) проводам чем по нескольким параллельным, это касается и электрической разводки платы и внутренней разводки чипа, и соединение периферийных устройств. Но параллельное соединение из физического мира ушло в "мир эфира" в радиосвязь, вот там очень выгодно устанавливать и осуществлять параллельную передачу данных.
Примеры чаще всего это устаревшие шины такие как: принтерный порт (IEEE 1284/Centronics), ISA, ATA (IDE), SCSI , PCI, FSB (Front Side Bus)
По времени передачи и приему информации связь делится:
- Симплексная связь - только передача или прием данных.
- Полудуплексная связь прием и передача разнесены во времени. Сначала прием, а затем передача или наоборот.
- Дуплекс - одновременно прием и передача.
Перейдем сразу к последовательному протоколу, он делится на:
Асинхронный протокол - данные передаются без внешнего тактирующего устройства. Данные можно передавать по двум проводам прием/передача. Но нужны дополнительные усилия для синхронизации (пример UART, RS-232, 1-Wire)
Синхронный протокол - данные синхронизированы с тактирующим устройством (примеры SPI и I2C)
И у меня вопрос к читателям, а протокол USB какой синхронный или асинхронный?
UART
Universal Asynchronous Receiver-Transmitter (UART), Универсальный асинхронный приёмопередатчик (УАПП)
В 60-70годах в нашей стране не принято пользоваться англоязычными терминами поэтому UART получает свое, русское название - УАПП (Универсальный асинхронный приёмопередатчик) как и все остальные названия, например НГМД и так далее. Хорошее время было, все кратко и понятно, например скажешь УВК-1 и сразу всем все понятно, разговор идет о устройстве ввода координатном или о мышке.
Что такое UART
UART это физическая реализация интерфейса в виде логической схемы (микросхемы) которая обеспечивает прием и передачу информация в последовательном виде, в пределах одного чипа или одного устройства, на короткие дистанции. Он непригоден для приема, передачи данных на "длинные дистанции". Причем понятие длинные и короткие взяты в кавычки и это не зря. Так как все в мире относительно и в данном случае то же, но попробуем разобраться, что за такие "длинные и короткие дистанции". Когда микроконтроллеры и другие низкоуровневые ИС взаимодействуют между собой по последовательному протоколу, они делают это на уровне TTL (транзисторно-транзисторная логика). Последовательные сигналы TTL живут между диапазоном напряжения питания микроконтроллера - обычно от 0 до 5.0 вольт (так было раньше, это уже классика) ну или до 3,3 вольт (так сейчас или еще меньше до 1,8 и 1,6 вольт КМОП) Сигнал такого диапазона да еще и не защищенный передать далеко не получится иногда проблемы возникают тут сразу же, при передачи от одной микросхемы до другой, вспомним микросхемы серии К(К155, К1533, К153) из недостатков которых: высокие требования к напряжению питания, отклонение не более 0,5 В, низкая помехоустойчивость, высокие требование в правильной разводки шины земли. Так вот передать далеко эти сигналы не получится, а что делать? Самое простое тупо усилить - поднять напряжение питания так родился интерфейс RS-232
Интерфейс RS-232
(Recommended Standard 232, рекомендованный стандарт RS-232, EIA232)
Это стандарт физического уровня, надстройка над UART для приема передачи данных другим устройствам, т. е. на "длинные дистанции
В далекие годы 60 годы прошлого века (1962 год) особо не стали заворачивается с обработками сигнала, да и мощностей подходящих не было, а потом, видимо, вспомнили телеграф.
Первый трансатлантический кабель обладал очень низкой скоростью передачи 103 слова за 16 часов, а все из за того, что на огромной дистанции (чудовищная ёмкость и сопротивление длиннющего кабеля) сигналы просто "размазывало" по длинному кабелю. Для повышения скорости увеличивали напряжение и в конце концов дошли до 2000 вольт после чего кабель благополучно сгорел.
Вот и тут просто взяли да повысили напряжение логического сигнала, но на самом деле не совсем просто, а вот так, см. инже
Электрический принцип работы RS-232
Логический нуль RS-232 лежит в пределе от +3 до +12 вольт, а единица от -3 до -12, соответственно. Между -3 и +3 вольт зона ничего, не нуля и не единицы, зона неопределённости. Т. е. разработчики стандарта инвертировали сигнал, сделали отрицательное напряжение для единицы и повысили и понизили напряжение до -12, +12вольт (на самом деле до -15, +15 вольт, а иногда и до 25 вольт) Пишут даже, что в блоке питания компьютера именно поэтому и появилась -12 вольт. Хорошо же они поработали над стандартом для которого пришлось модифицировать и блок питания, сейчас бы такая фишка не прошла, хотя.
Максимальная длинна кабеля по стандарту 20 метров, но нормально прием идет до 15 метров на скорости 19200 бод, но можно передать и на 900 метров снижая скорость (помните трансатлантический кабель) до 2400бод. А вообще максимальная скорость передачи составляет 115 200 бод
Это единица измерения скорости передачи символов (символьной скорости) или скорости модуляции в символах в секунду или импульсах в секунду.
С этими БОДами сплошная путаница, обратите внимание на определение, сколько ИЛИ, давайте разбираться.
Символьная скорость
Сначала БОД придумали для того чтобы определить сколько символов, букв можно передать за секунду по телетайпу, а кодировка тогда была 5 битная. Кодировка двоичная, импульс - единица, нет импульса - нолик. Все логично и понятно.
Импульсах в секунду
Потом по линиям связи стали общаться не только люди, но и машины и передавать не только символы - буквы, но и служебные биты например синхронизации, к чему их отнести к какой букве? А канал то они то же занимают. И вот тут и началась путаница, передавался не только символ, но и служебная информация. Как считать?
Квадратурная амплитудная модуляция (КАМд)
Но потом все еще больше запуталось, потому как в одном импульсе с помощью, например квадратурной амплитудной модуляции (КАМд), можно зашифровать не один бит, а например до 16 бит.
В общем все в конце концов вообще перепуталось!
Иногда в бодах выражают полную ёмкость канала.
Полная ёмкость канала = служебная информация в бит/c + эффективная информация в бит/c.
Преобразование UART в RS-232
Самый известный преобразователь интерфейса – это микросхема, разработанная фирмой MAXIM, которая и получила от нее часть своего названия (MAX 232). Эта микросхема из 5 вольт генерирует отрицательное напряжение, чтобы сопрягать 5-вольтовый UART с RS-232.
После Vogue истерии появилось множество вопросов, как подключить плату к компьютеру. И многие люди даже не понимают, что же такое UART. И я решил рассказать здесь какой это мощный инструмент.
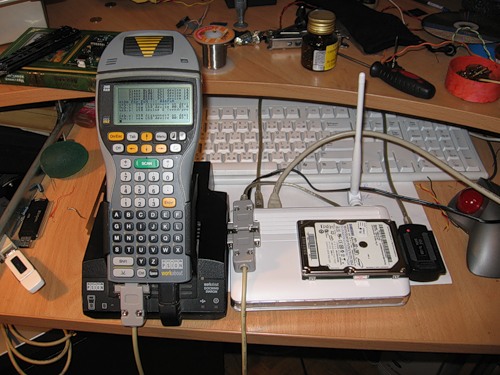
Роутер превращается в компьютер, если к нему по UART подключить клавиатуру и дисплей
От телеграфа к COM-порту
Протокол UART (Universal asynchronous receiver/transmitter) или, по-русски, УАПП (универсальный асинхронный приемопередатчик) — старейший и самый распространенный на сегодняшний день физический протокол передачи данных. Наиболее известен из семейства UART протокол RS-232 (в народе – COM-порт, тот самый который стоит у тебя в компе). Это, наверное, самый древний компьютерный интерфейс. Он дожил до наших дней и не потерял своей актуальности.
В 1971 году, когда уже начался бум микросхем, Гордон Белл для компьютеров PDP фирмы Western Digital сделал микросхему UART WD1402A. Примерно в начале 80-х фирмой National Semiconductor был создан чип 8520. В 90-е был придуман буфер к интерфейсу, что позволило передавать данные на более высоких скоростях. Этот интерфейс, не претерпев практически никаких изменений, дошел и до наших дней
Физика интерфейса
Чтобы понять, что роднит и отличает разные UART-интерфейсы, разберем принцип работы самого популярного и любимого нами протокола RS-232. Дотошно расписывать все тонкости его работы я не буду. Об этом написан ни один десяток мегабайт статей, и если ты умеешь пользоваться Гуглом, то без проблем найдешь всю необходимую информацию. Но основы я расскажу, благо с ними можно уже круто всем рулить, а всякие фишки используются очень редко.
Основные рабочие линии у нас – RXD и TXD, или просто RX и TX. Передающая линия – TXD (Transmitted Data), а порт RXD (Received Data) – принимающая.
Эти линии СОМ-порта задействованы при передаче без аппаратного управления потоком данных. При аппаратном потоке задействованы еще дополнительные интерфейсные линии (DTS, RTS и пр.). Выход передатчика TX соединен с входом приемника RX и наоборот. Электрический принцип работы RS-232 отличается от стандартной 5-вольтовой TTL логики. В этом протоколе логический нуль лежит от +3 до +12 вольт, а единица от -3 до -12, соответственно. Промежуток от -3 до +3 вольт считается зоной неопределенности. Учти, что все напряжения указаны относительно корпуса компьютера, или земли. Теперь, я думаю, ты понимаешь, зачем в компьютерном блоке питания существует сразу два напряжения: -12 и +12 вольт. Они были введены специально для работы СОМ-порта.
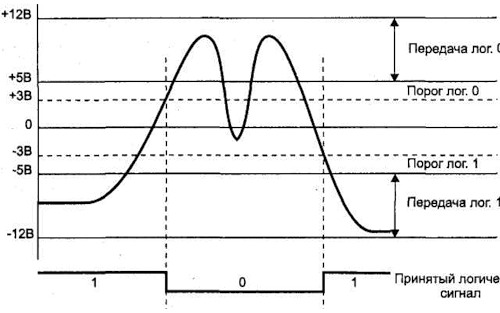
Приём сигнала по RS-232 (взято из книги М.Гук «Аппаратные интерфейсы ПК»)
Такая большая амплитуда рабочих напряжений, целых 24 вольта, нужна в первую очередь для помехоустойчивости линий связи. По стандарту, длина кабеля, по которому у нас бегают данные, может быть 15 м. Хотя на практике люди умудрялись заставлять его работать даже на 25 м. Электрические параметры RS-232 – это главная характеристика, которая отличает его от других протоколов семейства UART.
Следующие характеристики – формат посылки и скорость передачи данных – полностью применимы ко всем видам UART и обеспечивают их совместимость через несложные схемы сопряжения.
Стандартная посылка занимает 10 бит. Но правило это распространяется только на стандартные настройки СОМ-порта. В принципе, его можно перенастроить так, чтобы он даже интерфейс One-Wire понимал. В режиме простоя, когда по линии ничего не передается, она находится в состоянии логической единицы, или -12 вольт. Начало передачи обозначают передачей стартового бита, который всегда равен нулю. Затем идет передача восьми бит данных. Завершает посылку бит четности и стоповый бит. Бит четности осуществляет проверку переданных данных. Стоповый бит говорит нам, что пересылка данных завершена. Надо отметить, что STOP-бит может занимать 1, 1.5, и 2 бита. Не стоит думать, что это дробные биты, это число говорит только о его длительности. Стоповый бит, как и стартовый, равен нулю.

Сигнал UART на экране осциллографа. Виден старт бит, данные и стоповый бит. Спасибо DIHALTза картинку
Скорость работы
Даже если тебе раньше никогда не приходилось работать с СОМ-портом, по крайней мере, в модеме ты должен знать номинальные скорости работы: 9600, 28800, 33600, 56000 и т.п. Сколько бит в секунду убегает из нашего порта? Вот смотри, допустим, скорость у нас 9600 бит в секунду. Это означает, что передача одного бита будет занимать 1/9600 секунды, а пересылка байта – 11/9600. И такая скорость для байта верна только в случае, если стоп-бит будет занимать один бит. В случае, если он занимает два стоп-бита, то передача будет 12/9600. Это связано с тем, что вместе с битами данных передаются еще специальные биты: старт, стоп и бит четности. Линейка скоростей СОМ-порта стандартизирована. Как правило, все устройства работают на трех стандартных скоростях: 9600, 19200, 115200. Но возможны другие варианты, даже использование нестандартных скоростей или скорости, меняющейся во времени, – с этим я сталкивался при разборе полетов очередного устройства.
Такой разный протокол
Видов UART существует великое множество. Я не буду перечислять их наименования, ибо, если ты владеешь английским, то сумеешь и сам нагуглить. Но самые основные не отметить нельзя! Напомню, что главное отличие интерфейсов состоит в среде и способе передаче данных. Данные могут передаваться даже по оптоволокну.
Второй по распространению интерфейс после RS-232 – это RS-485. Он является промышленным стандартом, и передача в нем осуществляется по витой паре, что дает ему неплохую помехоустойчивость и повышенную скорость передачи до 4 мегабит в секунду. Длина провода тут может достигать 1 км. Как правило, он используется на заводах для управления разными станками.
Надо сказать, что IRDA, или инфракрасная связь, которая встроена в большинство телефонов и КПК, тоже по сути является UARTом. Только данные передаются не по проводам, а с помощью инфракрасного излучения.
В SMART-картах (SIM, спутниковое телевиденье, банковские карты) – тех самых устройствах, которые мечтает похачить каждый уважающий себя фрикер – тоже используется наш любимый UART. Правда, там полудуплексная передача данных, и логика работы может быть 1,8/3,3 и 5 вольт. Выглядит так, будто RX запаян с TX на одном конце и на другом – в результате, один передает, другой в этот момент слушает, и наоборот. Это регламентировано стандартом смарт-карт. Так мы точно знаем, сколько байт пошлем, и сколько нам ответит карточка. Тема достойна отдельной статьи. В общем, запомни, что UART есть практически везде.
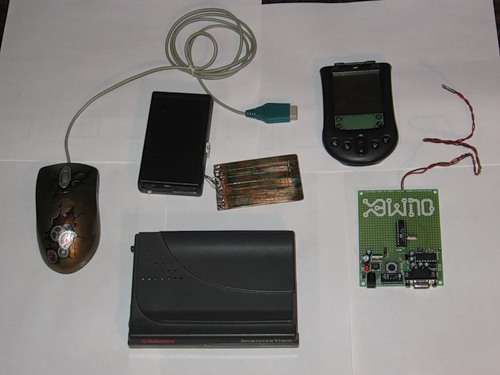
Устройства, которые имеют на своём борту UART, по часовой стрелке: мышка, ридер-эмулятор SMART-карт, КПК Palm m105, отладочная плата для микроконтроллера ATtiny2313 (или AT89C2051), модем.
Сопряжение интерфейсов
Я уже глаза намозолил разными интерфейсами, но как с ними работать-то? Ну, с обычным RS-232 понятно, а, допустим, с 5-вольтовым юартом как быть? Все просто: существуют различные готовые микросхемы-преобразователи. Как правило, в маркировке они содержат цифры «232». Увидел в схеме микруху с этими цифирями – будь уверен: скорее всего, это преобразователь. Через такие микросхемы с небольшим обвязом и сопрягаются все интерфейсы UART. Я не буду рассказывать о промышленных интерфейсах, а скажу о тех преобразователях, которые интересуют нас в первую очередь.
Самый известный преобразователь интерфейса – это микросхема, разработанная фирмой MAXIM, которая и получила от нее часть своего названия (max232). Для ее работы требуется четыре конденсатора от 0,1 микрофарады до 4 микрофарад и питание 5 вольт. Удивительно, что эта микросхема из 5 вольт генерирует отрицательное напряжение, чтобы сопрягать 5-вольтовый UART с RS-232.
Существуют микросхемы сопряжения USB с UART, например, микросхема ft232rl. В Ubuntu для этой микросхемы уже встроены драйвера. Для Windows их придется качать с официального сайта. После установки драйверов в системе появится виртуальный СОМ-порт, и с ним уже можно рулить различными устройствами. Советую не принимать эти микросхемы, как единственно возможные. Найдется громадное количество более дешевых и интересных аналогов, посему наседай на Гугл и поймешь, что мир UARTа – это круто.
В целом, микросхемы стоят достаточно дорого и порой можно обойтись более сложными, но зато более дешевыми схемами на паре транзисторов.
Что нам это дает?
Как ты понял, интерфейс UART присутствует во многих устройствах, в которых стоит какой-либо процессор или контроллер. Я даже больше скажу: если там стоит контроллер, то юарт есть стопудово (только он не всегда может использоваться). Как правило, по этому интерфейсу идет наладка и проверка работоспособности девайса. Зачастую производитель умалчивает о наличии этого интерфейса в изделии, но найти его несложно: достаточно скачать мануал на процессор и, где находится юарт, ты будешь знать. После того, как ты получишь физический доступ к железяке по нашему интерфейсу, можно его настроить на свое усмотрение или даже заставить работать, так как надо тебе, а не как задумал производитель. В общем, – выжать максимум возможностей из скромного девайса. Знание этого протокола дает также возможность подслушать, что же творится в линиях обмена между различными процессорами, так как часто производители организуют целые юарт-сети в своем устройстве. В общем, применений много, главное – интуитивно понимать, как это делать.
Апдейтим роутер
Собираем преобразователь
Чтобы подключить роутер к компу, необходимо сопрячь интерфейсы RS-232 с UARTом роутера. В принципе, можно подключить к USB, используя указанную выше микросхему FT232RL, – что я и сделал при первой проверке роутера. Но эта микросхема – в достаточно сложном для пайки корпусе, посему мы поговорим о более простых решениях. А именно – микросхеме MAX232. Если ты собираешься питаться от роутера, то там, скорее всего, будет 3,3 вольта, поэтому лучше использовать MAX3232, которая обычно стоит в КПК (схему распайки нетрудно найти в инете). Но в моем роутере присутствовало питание +5 вольт на входе, а указанных микросхем у меня великое множество, и я не стал заморачиваться. Для сборки нам потребуются конденсаторы 0,1 мкФ (4 штуки) и сама микросхема. Запаиваем все по традиционной схеме, и начинаем эксперименты.
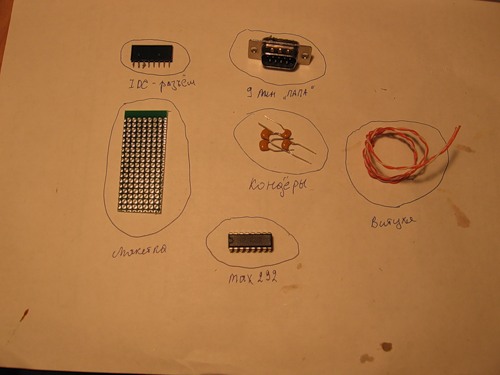
Исходники для сборки
На выход я сразу повесил 9-пиновый разъем типа «папа», чтобы можно было легко подключить нуль-модемный кабель. Если ты помнишь, во времена DOSа такими кабелями делали сетку из двух компов и резались в «Дюкнюкем». Провод для наших целей собрать несложно. Правда, получится не полный нуль-модем и через него особо не поиграешь, но рулить точкой доступа будет самое то! Тебе понадобятся два 9-пиновых разъема типа «мама», корпуса к ним и провод, например, от старой мышки или клавы (главное, чтобы в нем было три провода). Сначала соединяем земли ¬- это пятый контакт разъемов; просто берем любой провод и с обоих сторон припаиваем к 5-му контакту. А вот с RX и TX надо поступить хитрее. С одного конца провода запаиваем на 3-й контакт, а с другого – на 2-й. Аналогично с третьим проводом, только с одного конца запаиваем на 2-й контакт, с другого – на 3-й. Суть в том, что TX должен передавать в RX. Прячем запаянные разъемы в корпус — и готов нуль-модемный кабель!

Распаянные иголки на плате роутера.
Для удобства монтажа в материнку роутера я впаял штырьковый разъем, а в монтажку с MAX232 – обратный разъем и вставил платку, как в слот. RX и TX роутера подбираются экспериментально.
Собраная плата
Теперь надо запитать микросхему преобразователя. Общий провод у нас присутствует уже прямо в разъеме на мамке роутера. А вот + 5 вольт находится прямо у входа питания роутера, в месте, где подключается адаптер. Точку нахождения 5 вольт определяем вольтметром, измеряя разные узлы относительно земли роутера.
Подключаем питание. Включаем и начинаем наши злостные эксперименты.

Прожигаем отверстие для вывода проводов
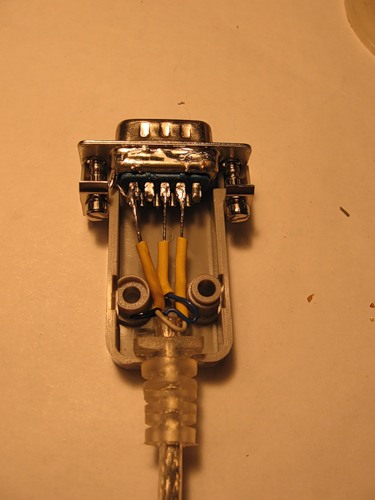
Распаянный СОМ-порт

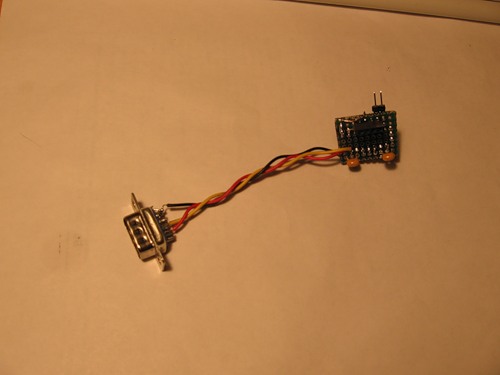
Всё в сборе. Обратите внимание, что красный провод питания идёт к разъёму адаптера роутера. Узелок внутри сделан, для того чтобы рывком на оторвать припаянные провода.
Настройка терминала
Нам нужно настроить терминальную программу. В Винде все достаточно просто: запускаем Hyper Terminal, отключаем программную и аппаратную проверку данных, выставляем скорость 115200 и один стоповый бит. А вот в Линухе дело обстоит чуть хитрее. У меня Ubuntu, и рассказывать буду про нее. Для начала разберись, как в твоей сборке именуется СОМ-порт. В моем случае СОМ1 был ttyS0 (если использовать к примеру микросхему FT232, то он будет именоваться ttyUSB0). Для работы с ним я использовал софтинку minicom.
Запускай ее с параметрами: minicom -l -8 -c on -s. Далее выбирай «Настройки последовательного порта»:
Последовательный порт /dev/ttyS0
* Скорость/четность/биты 115200 8N1
* Аппаратное управление потоком — нет
* Программное управление потоком — нет
Сохраняем настройки. Софтина попробует проинициализировать модем — не обращай внимания. Чтобы вызвать меню, нажми <ctrl-a z>. Там можно менять настройки, например: включить/выключить эхо — Е.
Настройка
Я не рекомендую подключать микросхему преобразователя к роутеру, дабы проверить ее функционал. Допускается только брать с него питание. Проверка проходит очень просто — необходимо перемкнуть RX с TX. Сначала перемыкаешь в СОМ-порте 2-й и 3-й контакт — проверяешь настройки терминалки. Пишешь что-то на клаве: если символы возвращаются, значит, все ОК. Также проверяешь кабель, те же контакты. Потом подключаешь микросхему, и уже у нее на выходе ставишь перемычку. Я заостряю на этом внимание, потому что, например, у меня возникли проблемы, и ничего не работало, пока я все не проверил и не нашел ошибку.
После всех настроек можешь смело цеплять к роутеру и искать RX-TX на роутере, периодически выдергивая из него питание. Если все сделано правильно, то при подаче питания ты увидишь лог загрузки роутера. Принимай поздравления, теперь у тебя полный аппаратный рут, так, будто ты сидишь за монитором с клавой роутера.

Лог загрузки роутера в программе minicom
Автономное плаванье
Согласись, делать через терминальную программу то же самое, что удобнее сделать через SSH – не айс. Мне хотелось превратить роутер в автономный Linux-компьютер, со своей хитрой архитектурой. Для этого нужно, чтобы данные с клавиатуры передавались по UART, и по нему же выводились на монитор. Паять и разрабатывать устройство было лениво. Тогда-то и пришла идея заюзать для этих целей пылящийся без дела КПК. По сути, наладонник будет исполнять роль контроллера клавиатуры и дисплея, ну и служить сопряжением интерфейсов.
Сначала я попробовал древнейший Palm m100. Но, видимо, у него очень маленькая буферная память, и от количества данных, которые идут с роутера, ему становилось плохо. Я взял другой — промышленный КПК, с нормальным СОМ-портом и терминалкой. Подключил, вставил в док и, в результате, получил небольшой линукс-компьютер. В принципе, вместо дорогущего промышленного КПК подойдет большинство наладонников, работающих под операционкой WinCE, главное – найти подходящий терминальный софт.
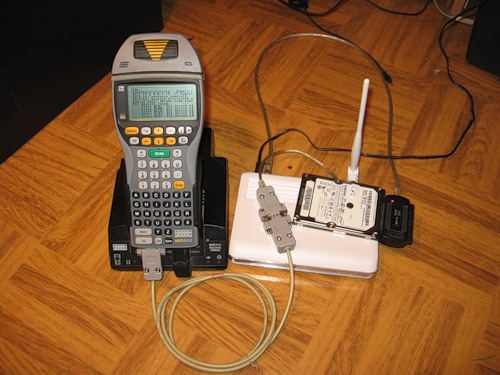
Линукс компьютер :)
Итоги
Итак, я показал небольшой пример использования UART. Если ты вкуришь в этот протокол, то поверь, станешь просто повелителем различных железок. Есть он практически везде, и через него можно сопрягать, казалось бы, совершенно разные вещи. К примеру, к тому же роутеру при небольших настройках подключается мобильный телефон по юарту, – и раздает с него интернет. В общем, применений куча. Не бойся экспериментировать, самообразовываться и реализовать свои идеи.
Этот пост является отредактированной для хабра версией моей статьи в Хакере № 05/09 «Главный инструмент фрикера».

Такое мудрёное название записи БЖ можно расшифровать намного проще.
"В рамках борьбы за интеллектуальную собственность FTDI ломает контрафактные чипы программными средствами."
Собственно злая компания съела мой шнурок. )))
А я то думаю, руки чтоли кривые, аль голова с плеч свалилась. ЧЁ ШНУРОК НЕ РАБОТАЕТ !
Кароч прошлые выходные прошли в решении проблемы. И я её решил скажу я вам.
Спросите как ?
Пишу…
Сперва я накидаю вам ссылок, потому как не являюсь первооткрывателем в данной теме и не претендую на авторство.
1 — Воскрешаем FTDI в картинках
2 — Восстанавливаем Arduino Nano
3 — FTDI наносит ответный удар
4 — VAG-COM. Восстанавливаем работоспособность VCDS 10.6
Везде по чуть-чуть и вот оно счастье ))))
Иногда борьба корпораций с конечными пользователями приобретает гротескную форму. Коротко: я перестал любить FTDI.
Если вы используете устройство с подключением через конвертер USB2COM на чипе FTDI под Windows — берегитесь. В рамках борьбы за интеллектуальную собственность FTDI ломает контрафактные чипы программными средствами.
В начале октября вышло обновление Windows, после установки которого драйверы начинают ругаться на устройство FTDI. После этого все пошли на официальный сайт FTDI и скачали последную версию драйверов — 2.12.00 WHQL Certified. И тут начинается самое интересное, драйверы проверяют чип на контрафакт, и если он не оригинальный – выводят его из строя путем смены PID на 0000. После чего в списке устройств появляется FT232R USB UART, к которому никакой драйвер уже не подходит.
Гугление выявило что с подобной проблемой столкнулось не только сообщество любителей Arduino, но и автолюбители использующие FT232 в OBD адаптерах, и многие другие, использующие этот чип в своей жизни. Обычно проблему решали заменой кабеля на чипах CH340, CP2102, PL2303 и т.п.
Процесс выхода чипа FTDI из строя состоял из двух стадий. Сначала происходит автоматическое обновление драйверов FTDI через Windows update. Эти драйверы не изменяют PID, а просто отказываются работать с неправильным с их точки зрения устройством.
Пользователь, скачивает свежие драйвера, не читает и соглашается с лицензионным соглашением, после чего драйверы изменяют PID на 0000. Рекомендованное лечение: поставить старые драйверы 2.8.14 (или ранние), прописать правильный PID (по возможности заблокировав его на запись), в дальнейшем не обновлять драйверы FTDI.
Замечательная компания FTDI сменила тактику борьбы с поддельными чипами. Ее решение изящно, легально и позволяет контролировать рынок. Вот только устраивает ли оно конечных пользователей? Если ранее, вы просто устанавливали драйверы штатными средствами Windows, то теперь, новые драйверы поставляются в виде exe и при инсталляции вы принимаете лицензионное соглашение, в котором есть такие слова:
1.5 Use of the Software as a driver for, or installation of the Software onto, a component that is not a Genuine FTDI Component, including without limitation counterfeit components, MAY IRRETRIEVABLY DAMAGE THAT COMPONENT
В вольном переводе звучит так: использование этого программного обеспечения с поддельными компонентами может привести к повреждению этих компонентов.
Тем кто столкнулся с данной проблемой советут читать выше выложенные 4 ссылки.
А у меня всё )))
Всем пока.
Чипы FTDI, CH340, ATMEGA16U2 с драйверами позволяют плате Arduino и USB адаптерам подключаться к компьютеру и взаимодействовать с внешним окружением через Serial UART. С их помощью Ардуино может скачивать прошивку, загружать и отправлять данные, не заботясь о низкоуровневой поддержке последовательного соединения. В платах разных производителей могут использоваться различные чипы и драйвера.
В этой статье мы рассмотрим наиболее популярные микросхемы и узнаем, как скачать и установить соответствующие драйвера для нормальной работы Arduino Uno, Nano, Mega и другими платами.
Чипы CH340g, FTDI FT232, ATMEGA 16U2 / 8U2

Обычно с чипами USB преобразователей и поиском драйверов сталкиваются в тот момент, когда возникает проблема подключения платы к компьютеру. Скорее всего, вы тоже нашли эту статью, пытаясь заставить Arduino IDE взаимодействовать с китайской ардуинкой. Давайте разберемся, какую роль во взаимодействии с компьютером играет чип преобразователя и зачем устанавливать какие-то драйверы, чтобы все заработало.
Зачем нужен USB / UART TTL преобразователь
USB преобразователи в Ардуино
Мы должны использовать внешние чипы, потому что контроллер ATMEGA328, являющийся сердцем большинства современных плат Arduino, не содержит в своих кристаллических внутренностях встроенного преобразователя. Если вы посмотрите на плату ардуино, то увидите корпус чипа, на нем можно разобрать и его тип.




Исторически наиболее популярным вариантом чипов USB/UART конвертера была линейка микросхем от шотландского производителя FTDI. Главным ее недостатком была стоимость и весьма странная политика в области контроля контрафакта, зачастую приводящая к тому, что легальные купленные устройства блокировались драйверами компании. Сегодня существенную конкуренцию FTDI составляют микросхемы семейства CH340, массово производимые многочисленными китайскими производителями. Они гораздо дешевле и достаточно надежны и это постепенно привело к тому, что в большинстве недорогих контроллеров Arduino и адаптеров установлены именно чипы CH340 (CH340g).
Процедура установки драйвера для CH340g на самом деле очень проста и почти всегда проходит без ошибок на самых популярных операционных системах Windows7, Windows10. Именно поэтому никаких проблем с использованием недорогих ардуино плат, несущих на себе чип CH340, почти никогда не возникает.
USB драйвер для ардуино
Если мы подключаем Ардуино к компьютеру, то чип с помощью драйвера попросит систему открыть порт и начнет взаимодействие . И для чипов разных производителей потребуются разные драйвера. Проблемы возникают, когда драйвера нет. Система пытается найти его для подключенного устройства, не находит и мы никогда не увидим его в списке устройств. Для решения проблемы надо найти и скачать соответствующие драйвера, а затем установить их на компьютер. Ниже мы рассмотрим, как это делается на примере USB драйвера CH340.
Установка драйвера для CH340
Китайские микросхемы CH340 используется довольно часто благодаря своей низкой стоимости и вполне приемлемому качеству.
В серию микросхем CH340 входят CH340T (мост USB – UART), CH340R (мост USB – IrDA) и CH340G (мост USB – UART). Последняя микросхема является наиболее распространенной и удобной с точки зрения корпуса с меньшим числом выводов.
Установка драйвера CH340
Процесс установки драйвера разбивается на несколько шагов:
- Загрузка драйвера.
- Распаковка скачанного архива.
- Найдите папку CH341ER.
- Запуск исполнительного файла SETUP.EXE.
- Нажать на кнопку Установить.
- На этом установка драйвера на компьютер завершена.




Характеристики CH340
Микросхема обладает следующими характеристиками и возможностями:
- Не нужно большое количество внешних компонентов, требуются только кварцевый резонатор и 4 конденсатора.
- Создание виртуального последовательного порта.
- Возможность применения всех приложений для COM-портов.
- Работает с сигналами уровней 5 и 3,3В.
- Выполнена в удобном корпусе SO-16 с малым количеством выводов и небольшим числом внешних компонентов.
- Поддержка полной скорости спецификации USB0.
- Наличие встроенного буфера типа FIFO.
- Поддержка всех стандартных режимов передачи данных.
- Поддержка симплексного, полудуплексного, дуплексного асинхронных режимов обмена.
- Поддержка интерфейсов RS23, RS422, RS485.
- Рабочие температуры лежат в диапазоне от -40С до 85 С.
Распиновка микросхемы CH340G представлена на рисунке.
На плате обозначены следующие контакты:
2 – TXD сигнал UART.
3 – RXD сигнал UART.
4 – напряжение питания.
7 – XI вход для кварцевого резонатора и конденсатора.
8 – XO выход для кварцевого резонатора и конденсатора.
12 – DCD сигнал UART.
13 – DTR сигнал UART.
14 – RTS сигнал UART.
15 – Включение инверсии входа RXD.
Микросхема эмулирует работу последовательного порта. Все приложения работают с конвертером интерфейса CH340G без изменения кода.
Чип FTDI для Arduino
Следующим поколением аппаратных мостов были микросхемы FT232B и FT245B. В них добавился новый режим работы BitBang, также появилась возможность реализации восьми независимых линий ввода-вывода. Помимо этого была изменена схемотехника кристалла.
С 2006 года начался выпуск микросхем FT232R и FT245R, в которых были интегрированы на кристалл энергонезависимая память, тактовый генератор и другие компоненты. Основными преимуществами микросхемы FT232RL являются хорошая функциональность, легкость монтажа и минимальная обвязка. Распиновка модуля представлена на рисунке ниже.

Характеристики микросхемы FT232R:
- Одночиповый переходник USB-UART.
- Поддержка режимов передачи 7и 8 бит данных, 1 и 2 стоповых бита.
- Бесплатные драйверы VCP и D2XX.
- Скорость передачи 300 бод – 3 мегабод для RS422.
- Наличие встроенного идентификационного номера.
- Настраиваемые выходы CBUS.
- Вывод состояния приема и передачи на внешние светодиоды.
- Наличие буферов FIFO для высокоскоростного приема/передачи данных.
- Усовершенствованный режим bit bang.
- Встроенная память EEPROM на 1024 байт.
- Наличие встроенного стабилизатора напряжения на 3.3 В и для внешних сигналов от 1,8 до 5В.
- Высокая нагрузочная способность.
- Малое потребление энергии.
- Совместима с USB 2.0 Full Speed.
- Температурный диапазон от -40С до 85С.
Микросхема предоставляется с заранее запрограммированной памятью EEPROM, поэтому дополнительное программирование энергонезависимой памяти перед началом работы не требуется.
Чип ATMEGA16U2/8U2 для ардуино
Чипы ATMEGA16U2/8U2 используются в качестве моста между USB-портом и последовательным портом. Версия платы ATmega8u2 использовалась для предыдущих плат Ардуино Uno и Mega.
Технические характеристики чипа ATMEGA16U2:
Контроллер ATmega8u2 в своей прошивке уже имеет установленные USB COM драйвера, поэтому установка дополнительных не требуется.
Характеристики ATmega8u2:
- Диапазон напряжений от 2,7В до 5,5В.
- 32 вывода.
- Скорость ЦПУ 16 МГц.
- Объем флеш-памяти 8Кб.
- Поддержка встроенных интерфейсов I2C, SPI, UART, USART.
- Размер ядра 8 бит.
- Несколько режимов работы – холостой ход, энергосберегающий режим, режим ожидания, расширенный режим ожидания и выключение питания.
- Возможность внешнего и внутреннего прерывания.
- 22 программируемых линии ввода-вывода.
- 512 б энергонезависимой памяти.
- 512 б ОЗУ.
- Рабочие температуры от -40С до 85С.
Заключение и выводы
Микросхемы-контроллеры последовательного порта служат в качестве преобразователя интерфейса USB. Наиболее популярными являются микросхемы CH340 (преобразователь USB в UART), аппаратные мосты от фирмы FTDI, к которым относятся микросхемы FT8U232, FT8U245, FT232R и FT245R (USB-UART и USB – FIFO) и ATmega8U2 и ATmega16U2.
Читайте также: