
Где откладывается вектор скорости нашего судна на планшете
Обновлено: 04.07.2024
Водный транспорт, теория и практика, все о морских и речных судах
20.05.2015 21:45
дата обновления страницы
Метод графической прокладки
Графическая прокладка дает более точную информацию о ситуации судов и выполняется на маневренном планшете М-78 (рис 212)
Задача на расхождение состоит из: 1) нанесения начальной ситуации на планшет и построения треугольников скоростей векторов относительной скорости;
2) оценки ситуации опасного сближения (столкновения) с судами, эхо-сигналы которых наблюдаются на экране РЛС, путем расчета времени кратчайшего сближения /кр, пересечения /"ер, дистанции кратчайшего сближения DKр и выявления их реальной и потенциальной опасностей;
3) выбора и обоснования маневра, выделения судов, с которыми необходимо расходиться;
4) расчета выбранного маневра с помощью графического перестроения векторных треугольников начальной ситуации;
5) расчета момента начала маневра (с учетом маневренных элементов
судна), выбирается упрежденное время (3 или 6 мин), дистанция расхождения, время расхождения и дистанция отхода от своего первоначального курса за время маневрирования;
6) нанесение ожидаемой линии относительного движения (ОЛОД) и последующий контроль за перемещением судна-цели (наблюдаемого судна).
Рассмотрим подробно процесс решения задачи на расхождение с помощью графической (радиолокационной) прокладки на маневренном планшете.
1. Для удобства расчетов интервал времени принимает 3 или 6 мин, т е. 1/20 или 1/10 ч.
2. Строим на планшете из его центра вектор курса и скорости VL нашего судна.
Рис. 212 Маневренный планшет
Рис. 213. Решение задачи на расхождение с помощью графической прокладки
Рис 214 Определение потенциальной опасности и местоположения судна, для расхождения с которым требуется произвести расчет маневра
3. С появлением на экране РЛС эхо-сигналов определяем их пеленги и дистанции и наносим на планшет.
4. Через равные интервалы времени (3 или 6 мин) в прежней последовательности наносим следующие точки и после их соединения получим векторы относительной скорости.
5. При этих векторах строим векторные треугольники, для чего Vc своего судна из центра планшета переносим в первую точку L Соединив начало своего вектора Vc со второй точкой 2, получим вектор скорости наблюдаемого судна W
6. Линию, соединяющую точки 1 и 2, продлим за центр планшета, получим ЛОД.
Оценка ситуации заключается в определении степени опасности столкновения судов. Находим кратчайшее расстояние DKp, опуская перпендикуляр из центра планшета до ЛОД и точку пересечения курса судна-цели Dnep, для чего проводим из центра планшета линию, параллельную вектору скорости У" суд-на-цели до пересечения с ЛОД
Выявление потенциальной скорости судов можно осуществить двумя способами:
1) проигрываем маневр нашего судна (Vc) или судна-цели (V") и определяем по изменению ЛОД и Vo возможный переход из потенциальной опасности в реальную. Изменение курса, скорости или комбинированный маневр нашего судна вправо ухудшает ситуацию с судном "б". В данном случае маневр необходим с судном "б" (рис. 214);
2) использованием особенностей перемещения эхо-сигналов в относительном движении на экране РЛС, что было подробно разобрано при визуальном методе оценки ситуации.
Для выбора и обоснования вида маневра проигрывают все возможные его варианты: изменение курса, скорости или того и другого одновременно При этом учитываются все факторы, сопутствующие плаванию в условиях ограниченной видимости, навигационных особенностей района плавания, МППСС-72 и маневренных возможностей своего судна и возможного маневра судна-цели. Судоводитель должен стремиться к безопасному расхождению приемлемым вариантом Расчет маневра можно производить при помощи палетки и линейки. Он сводит к минимуму графическую работу по одному-двум судам. На рис. 215 выполнен расчет маневра для безопасного расхождения изменением своего курса вправо. Положение упрежденных точек не оказывает влияния на методику расчета с использованием векторных треугольников начальной ситуации. Следует всегда помнить, что момент упрежденной точки есть условный момент окончания маневра.
Момент начала маневра своего судна рассчитывается с учетом маневренных элементов судна (инерция, торможения, поворотливость и т. д.).
Рис. 215 Расчет маневра для расхождения изменением курса вправо; расчет выполнен с судном "б"
В векторном треугольнике судна "а" вектор нашей скорости поворачиваем вправо на рассчитанный угол. Получаем новый вектор относительной скорости Vo и соединяем точку _2 с концом повернутого вектора Vq. Параллельно вектору относительной скорости V'o из упрежденной точки проводим ОЛОД судна "а". Упрежденная точка берется за один и тот же интервал времени. После этого можно определить время расхождения судов tpicx и дистанцию отхода D0тх от курса нашего судна (см. рис. 215).
Для расчета используем новый вектор относительной скорости W Дистанция отхода рассчитывается на планшете. Для этого на линии нашего нового курса, проложенного из центра планшета, откладываем расстояние, которое пройдет наше судно за время расхождения. Затем из полученной точки опускаем перпендикуляр на линию первоначального курса. Отрезок этого перпендикуляра будет дистанцией отхода от курса в масштабе планшета.
Результат маневрирования контролируется с помощью ОЛОД. На планшет наносится не только ОЛОД судна, относительно которого рассчитан маневр, но и других судов, которые представляют потенциальную опасность. Эти линии ожидаемого относительного движения проводятся для контроля за развивающейся ситуацией после маневра, чтобы своевременно обнаружить маневр других судов, а также в случае допущенных ошибок в расчетах и графических построениях.
Из вышеизложенного видим, что оба метода взаимосвязаны и дополняют друг друга, обеспечивают решение задач на безопасное расхождение судов с помощью РЛС в условиях ограниченной видимости.
На некоторых судах над экраном РЛС установлен зеркальный планшет. Это вспомогательное устройство, являющееся беспаралаксной оптической системой. Преимущество зеркального планшета в том, что он дает возможность вести графическую прокладку, не прерывая наблюдения на экране РЛС.
Периодически повышая квалификацию, судоводители морского флота проходят тренировочные учения по решению задач на радиолокационных тренажерах.

Средства для чистки катеров

Чистка ультразвуком

Чистка ультразвуком

Чистка инжектора, форсунок

Очистка инжектора, форсунок

Тестирование форсунок

Промывка форсунок

Очистители деталей, УЗО

Очистка меди и бронзы
4 Курс. Видео. Расхождение с одним судном изменением курса. Маневренный планшет.
4 Курс. Расхождение с одним судном изменением курса (поворот вправо).
4 Курс. Видео. Расхождение с одним судном изменением скорости. Маневренный планшет.
Дополнительно можно смотреть видеоурок капитана дальнего плавания А. Богаченка, тоже хорошо объясняет.
Порядок решения задачи расхождения на маневренном планшете.
1) Из центра планшета провести вектор перемещения собственного судна за 6 минут ,Vн.
2) Сделать записи в таблице обработки радиолокационной информации о курсе (ИКн ) и скорости (Vн) собственного судна.
3) Из центра планшета радиусом Дзад. провести окружность.
4) Наблюдая за ситуацией на экране РЛС выбрать по изменению относительных полярных координат эхо сигнал опасного судна.
5) С экрана РЛС снять отсчёты пеленга и расстояния эхо-сигнала опасного судна, заметить судовое время, сделать записи в таблицу радиолокационной информации для нулевой точки о времени 0’ (пеленге и дистанции для судна А)
6) По этим данным нанести на маневренный планшет начальную ситуацию, обозначив нулевую точку цифрой 0’и большой буквой А.
11) Соединить нулевую и 6-ти минутную точку прямой для определения вектора относительного перемещения цели за 6 минут. Стрелка вектора направлена в 6-ти минутную точку. Обозначив этот вектор Vo.
12) Продлить вектор Vo до центра планшета, получим ЛОДА траекторию, по которой будет перемещаться эхо-сигнал судна А при неизменности курсов и скоростей собственного и встречного судов.
16) Соединить точку F с 6-ти минутной точкой прямой, получим 6-ти минутный вектор цели Vц, направленный в 6-ти минутную точку, обозначив его Vц.
17) Используя параллельную линейку и измеритель определить истинные курс и скорость судна цели А, сделать записи в таблицу обработки радиолокационной информации на маневренном планшете.
18) Нанесите упрежденную точку (рекомендуется 12-ти минутную с учетом времени набора информации) и провести из нее пунктирными линиями касательные к окружности Дзад. Получим ОЛОДы, по которым должны перемещаться эхо-сигналы судна при выполнении маневра.
19) Из 6-ти минутной точки провести линии параллельные ОЛОДам в противоположном направлении для определения сектора опасных курсов (СОК), за пределы которого нужно вывести конец вектора Vн для решения задачи расхождения. Если F находится в пределах СОК, решить задачу уменьшением скорости невозможно.
ОСНОВНЫЕ ПОНЯТИЯ, ОПРЕДЕЛЕНИЯ МАНЕВРЕННЫЙ ПЛАНШЕТ.
Маневренный планшет- сетка полярных координат, в центре которой находится судно-наблюдатель. Используется для графического решения задач на расхождение.
ЛОД- линия относительного движения. Траектория перемещения эхо-сигнала судна цели относительно условно неподвижного собственного судна на экране РЛС.
ОЛОД- ожидаемая линия относительного движения. Прогнозируемая траектория перемещения эхо-сигнала судна цели после окончания маневра собственного судна.
Dкр- дистанция кратчайшего сближения. Длина перпендикуляра опущенного из центра планшета на ЛОД.
Tкр- время кратчайшего сближения. Судовое время истекаемое с момента начала наблюдения до момента прихода судна цели в точку кратчайшего сближения.
t кр- промежуток времени от момента начала маневра до момента сближения на кратчайшее расстояние.
Vн- вектор скорости судна наблюдателя за 6 минут.
Vц- вектор скорости судна цели.
Vо- вектор относительной скорости судна цели.
СОК- сектор опасных курсов.
ЛОМ- линия окончания маневра.
F- фиксированная точка на маневренном планшете из которой, как из центра, берут свое начало векторы собственного судна и судна цели.
Опасное судно- это такое судно, пеленг которого не изменяется и расстояние до него уменьшается, а параметры кратчайшего сближения Дкр и Ткр меньше допустимых значений Дзад и Тзад.
Эффективный маневр- это такой маневр, который предназначен не только для решения задачи на расхождение, но и для того чтобы показать опасным судам, которые наблюдают за окружающей обстановкой только с использованием радиолокатора в условиях ограниченной видимости, действия собственного судна. Если выбран маневр отворота, то эффективным следует считать угол не менее 30°-45°, а если уменьшение скорости, то не менее чем наполовину. Нижним пределом должна быть скорость потери управляемости.
Графические построения треугольника скоростей.
Основным информационным элементом, который используется при ручном решении задачи расхождения, является треугольник перемещений за 6 минут. Вершинами указанного треугольника является нулевая точка «0», обозначающая момент начала наблюдений; 6-ти минутная точка и точка F (Fixed). Сторонами треугольника являются: вектор относительного перемещения Vо встречного судна за 6 минут; вектор перемещения собственного Vн судна за 6 минут; вектор истинного перемещения встречного судна Vц за 6 минут.
Дополнительно можно смотреть видеоурок капитана дальнего плавания А. Богаченка, тоже хорошо объясняет.
Примечание. В принципе, точка У выбирается произвольно, однако, на практике удобнее ее устанавливать через интервал времени, кратный интервалу времени между наблюдениями, т.к. в этом случае достаточно измерителем снять расстояние между точками наблюдения и отложить этот раствор от последней точки на продолжение ЛОД. Поскольку время между наблюдениями обычно принимается 3 мин., то и точка упреждения устанавливается через интервал, кратный 3 мин.
Из множества возможных вариантов судоводитель должен выбрать оптимальный, руководствуясь рядом условий:
· соблюдение правил МППСС;
· наличие других судов;
· наличие навигационных опасностей;
· особенности своего судна;
· другие обстоятельства, могущие повлиять на безопасность маневра.
В общем случае маневр курсом предпочтительнее маневра скоростью. Дело в том, что на изменение скорости требуется больше времени, чем на изменение курса, и кроме того, потеря скорости превращает судно в пассивного наблюдателя за развитием ситуации. И если ситуация начнет развиваться в опасную сторону, то потерявшее скорость судно будет уже не в состоянии предотвратить столкновения поскольку на разгон судна уходит существенно больше времени, чем на торможение. Только для относительно небольших судов нет разницы как маневрировать при расхождении - курсом или скоростью.
И еще одно замечание. Обычно, при расчете маневра курсом просто поворачивают вектор своей скорости. Правила МППСС требуют при расхождении избегать небольших изменений курса, чтобы другое судно могло однозначно понимать ваш маневр. Исходя из этого обычно рекомендуется в подобных случаях изменять курс не менее чем на 30 о . Однако, выход судна на циркуляцию всегда приводит к падению скорости (так при повороте на контркурс падение скорости может достигать 50% от первоначальной скорости). Это не всегда может иметь существенное значение, но помнить об этом следует.
Пошаговые действия для расхождения
с одним судном:
Наносится вектор скорости нашего судна
Делаются замеры пеленга и дистанции встречного судна
В таблицу записываются соответствующие данные
4. на планшете ставится точка, соответствующая положению встречного судна
5. в полученную точку параллельно переносится и "втыкается" вектор скорости нашего судна
Через 3 мин. повторяются пункты 2-4
Еще через 3 мин. повторяются пункты 2-4
По трем точкам строится ЛОД
9. достраиваются векторы V о и Vв
Оценивается ситуация и принимается решение предпринять маневр
Устанавливается точка упреждения У
Прокладывается ОЛОД
13. ОЛОД параллельно сносится в последнюю точку "скоростного треугольника" (треугольника, образованного векторами Vн ,Vв и Vо )
14. вектор Vн поворачивается (и/или изменяется его длина) таким образом, чтобы его острие легло на снесенную ОЛОД
Суть относительной прокладки заключается в том, что за центр системы координат мы принимаем наше судно, которое помещаем в центр планшета, а цели наносим на планшет в соответствующие точки по пеленгу и дистанции, измеренных при помощи РЛС.

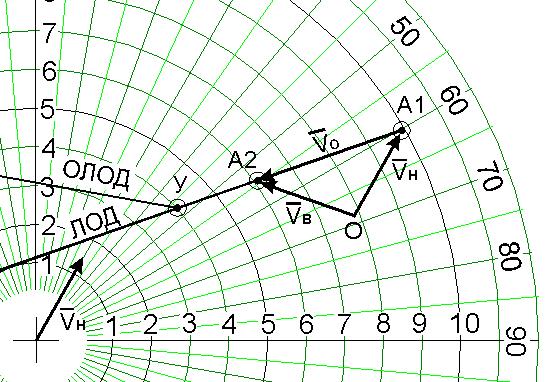
Рис. 13.14. Построение треугольника скоростей
Пошаговые действия для оценки ситуации:
1. в центр планшета наносится вектор скорости нашего судна, равный 6-ти минутному отрезку (например, скорость нашего судна 15 узлов, откладываем по курсу 1, 5 мили);
2. делаются замеры пеленга и дистанции встречного судна;
3. в таблицу записываются данные измерения и на планшет наносится первая точка – А1;
4. в полученную точку параллельно переносится и " втыкается " вектор скорости нашего судна;
5. через 3 минуты повторяются пункты 2-3, наносится вторая точка А2. Приближенно оценивается ситуация сближения;
6. еще через 3 минуты повторяются пункты 2-3, наносится третья точка А3;
7. соединив точки А1 – А2 – А3, получаем линию относительного движения – ЛОД;
8. из начала нашего вектора скорости строим вектор V в , который является вектором истинной скорости и курса встречного судна;
9. перпендикуляр, проведенный из центра планшета к ЛОД определяет Д кр (в нашем случае Д кр = 1,7 мили). Величину t кр находим, откладывая по ЛОД отрезки, равные V 0 до Д кр (здесь, примерно, укладывается 1,5 V 0 , т.е. t кр = 1,5 х 6 мин = 9 мин);
10. принимается решение по выбору маневра расхождения.
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна V н при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор V н2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.

Рис. 13.15. Расчет маневра курсом
Маневр расхождения скоростью
1. Необходимо на ЛОД нанести упреждающую точку У - положение цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. ОЛОД «отсекает» часть вектора нашего судна. Отрезок от начала вектора до точки пересечения с ОЛОД откладываем на векторе в центре планшета. Это и есть новая скорость нашего судна, необходимая для расхождения на заданной дистанции.
5. Снижение скорости необходимо начинать заранее – до наступления момента У, с тем, чтобы в этот момент судно уже имело новую скорость.

Рис. 13.16. Маневр расхождения скоростью
Маневр расхождения скоростью применим для судов водоизмещением до 20000 тонн. В любом случае, при выполнении маневра расхождения необходимо учитывать маневренные характеристики судна.
При выборе маневра расхождения с опасной целью, когда на экране наблюдаются эхо-сигналы других судов, необходимо учитывать те из них, ситуация сближения с которыми может ухудшиться в результате выбранного маневра. Такие опасные суда определяются глазомерно по направлению разворота ЛОД при предполагаемом маневре. Особенность радиолокационной прокладки в этом случае заключается в необходимости одновременного ее ведения для всех потенциально опасных судов. Как правило, на планшет наносится полный анализ ситуации до момента окончания маневра и возвращения к исходным параметрам движения вашего судна.
10. Принимается решение по выбору маневра расхождения.

Рис. 13.14. Построение треугольника скоростей
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна Vн при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор Vн2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.

Рис. 13.15. Расчет маневра курсом
Маневр расхождения скоростью.
1. Необходимо на ЛОД нанести упреждающую точку У – положение цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. ОЛОД «отсекает» часть вектора нашего судна. Отрезок от начала вектора до точки пересечения с ОЛОД откладываем на векторе в центре планшета. Это и есть новая скорость нашего судна, необходимая для расхождения на заданной дистанции.
5. Снижение скорости необходимо начинать заранее – до наступления момента У, с тем, чтобы в этот момент судно уже имело новую скорость.

Рис. 13.16. Маневр расхождения скоростью
Комбинированный маневр.
Комбинированный маневр включает в себя маневр расхождения с судами скоростью и курсом вместе. Процедуры маневра с 1-3 выполняются как в «маневр расхождения скоростью или курсом».

Рис. 13.17. Маневр расхождения скоростью и курсом
На рис 13.17 показан сектор возможных сочетаний скоростей и курсов, которые удовлетворяли решению задачи. Выбираем скорость и курс для выполнения маневра расхождения и задаем их судну.
Определение расстояния кратчайшего сближения.
перпендикуляр, проведенный из центра планшета к ЛОД определяет Дкр. Величину tкр находим, откладывая по ЛОД отрезки, равные V0 до Дкр.
Определение точки поворота на прежний курс.

Точка поворота на прежний курс определяется при пересечении ОЛОДа и ЛОДа (ЛОД проводится касательная к заданному кругу дистанции расхождения). До данной точки измеряется время поворота на прежний курс с помощью циркуля раствором взятым равный новой .
Читайте также: