
Naza v2 подключение к компьютеру
Обновлено: 07.07.2024
Квадрокоптер за 1 день и $120
Создать квадрокоптер как платформу для летающего робота я планирую уже очень давно. Первые расчеты и заказ деталей я сделал год еще назад. Однако, делать «просто коптер» чтобы полетать, управляя с пультом или даже в FPV режиме конечной задачей не является. Поэтому коптер должен быть максимально гибким и как можно менее дорогим.
По отдельности все детали для коптера есть, но их сопряжение — дело простое только в теории. Нужно быть и программистом и инженером и моделистом — вертолетчиком. Поэтому процесс движется довольно небыстро. А летать хочется :) Ничто так не расхолаживает и не демотивирует как отсутствие видимых результатов, особенно когда прогресс-то вроде есть, но не наглядный. Да и экспериментировать сразу на большом квадракоптере дорого и опасно.
Поэтому я решил собрать для экспериментов миникоптер. Как всегда — задача сделать недорого, просто и гибко.
Мой результат — готовый коптер за 1 день (на сборку и запуск) и $120 (стоимость квадрокоптера включая доставку). А с аппаратурой — $145.

Кому как, а для меня основной преградой в коптеростроении всегда была дороговизна проверенных наборов деталей (kit), которые можно купить в одном месте и поэкспериментировать. Ведь собрав коптер, просто так летать надоест очень быстро, если, конечно, вы не авиамоделист, для которого это лишь еще одна забавная моделька. Самое интересное — добавить коптеру немного (или много, зависит от умений и изобретательности) самостоятельности. Но пока поднимешь коптер в воздух потратишь столько сил, что на самое интересное запал уже начинает угасать. Да и пока отладишь программу управления — разоришься, ведь каждая ошибка — это почти наверняка падение, а самое дешевое падение — это сломанные пропеллеры.
Сейчас покажу, как это преодолеть.
Заказываем детали
На самом деле основной бюджет коптера еще меньше, всего около $100 включая доставку.
Итак, обязательные запчасти:
| Рама с моторами 445 мм | $28,95 |
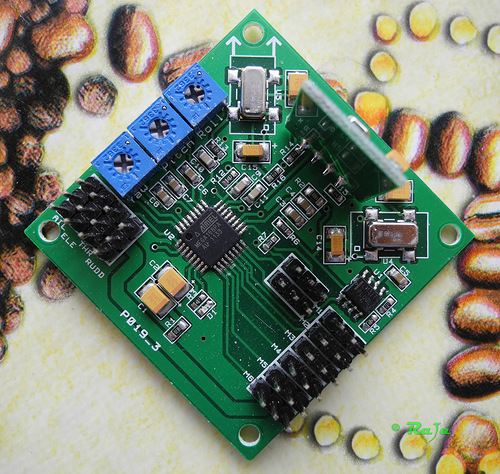
| Плата управления (аналог KKmulticopter, но от HK) | $14,95 |
| ESC (регуляторы хода) | $5,96 х 4 |
| Пропеллеры прямого и обратного вращения | $1,34 + $1,94 |
| Резиновые кольца для крепления пропеллеров | $1,4 |
| Пропсейверы Prop Saver w/ Band 4mm (10pcs) | $3,99 |
| Аккумулятор на 1300мАч | $5,96 |
Вот и весь джентльменский набор.
Но нам понадобится и кое-что дополнительно. Возможно, у вас что-то из этого имеется, поэтому заказывайте то, чего не хватает:
| AVR ISP Программатор для платы управления (подойдет FTBB, USBASP, Arduino… любой) | $4,75 |
| Провода от ресивера к плате управления | $4 |
| Servo extension для подключения ESC — свои провода не достают, берите любые или спаяйте сами — там три проводка | |
| Радиоаппаратура — любая с 4 и более каналами | от $22,99 |
| Разъемы XT60 к батарее | $2.16 |
| Силовой провод или аналогичный медный красного и черного цветов (+ -) | $1,29 |
Радиоаппаратура у меня Turnigy 9x, которую я доработал для использования с LiIon аккумулятором и впаял разъем для обновления прошивки аппаратуры (я пользуюсь прошивкой er9x), но ее сейчас очень долго ждать из-за ее популярности, поэтому и не стал ее рекомендовать. Вообще, берите любую, какая есть в наличии и которая вам нравится с количеством каналов от 4. У меня Mode2 (ручка газа слева), но это не принципиально. Если возьмете 6-канальную Hobby King 2.4Ghz 6Ch Tx & Rx V2, не забудьте к ней шнурок для программирования, т.к. на ней самой никаких настроек не сделать, даже реверсировать каналы. Настраивается только с ПК.
Собираем наш квадрик
Собирается весь квадрокоптер за 1 выходной. На самом деле даже быстрее. Я потратил около 6 часов в сумме, работая не торопясь.
Сначала собираем раму. Приходит она вот в таком виде (мелкие детали на фото отсутствуют, они в пакете)
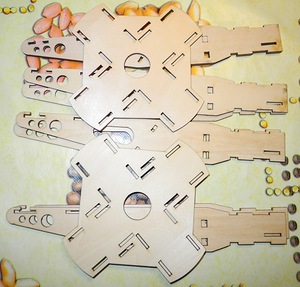
Боковинки каждого луча склеиваем с помощью ПВА-М или суперклея (ПВА-М дает прочные эластичные швы, но собирать раму лучше вечерком, чтобы до утра оставить клей высохнуть как следует). Собираем все лучи и приклеиваем к нижней центральной пластине. Верхнюю пока отложите в сторону. Ножки лучей склеиваются из двух одинаковых половинок. Поскольку в луче всего 5 деталей (2 стенки и три распорки :), думаю, что сложности в сборке не составит.
Откладываем раму сохнуть до утра. А с утра достаем паяльник, термоусадку, провода и садимся паять.
Сначала продеваем провода всех 4х ESC в лучи вот таким макаром:

Затем берем толстый провод, отрезаем по 2 куска красного и черного цветов длиной сантиметров по 5-7. Зачищаем с концов по 5 мм и в середине примерно 5-7 мм. Куски спаиваем зачищенными серединами крест-накрест. Получится два креста — черного и красного цветов. Концы пока просто залудить.
Затем к красному перекрестию припаиваем красные концы от всех четырех ESC, не забыв надеть кусочки термоусадочной трубки по 1.5-2 см. То же самое проделываем с черной крестовиной. Размещаем все это в центре квадрокоптера.
Отрезаем еще по 1 куску толстого провода и припаиваем их к перекрестьям, концы выводим в отверстие в днище коптера, а место спайки изолируем:

Проверьте все внимательно, чтобы не было непропаев и коротких замыканий. Припоя не жалейте, токи тут очень серьезные текут, поэтому площадь контакта нужна побольше.
Если все в порядке, можно смазать ПВА-М верхнюю крестовину коптера и приклеить ее, спрятав таким образом все силовые провода внутри. На хвостик из просунутых в отверстие днища проводов надеваем термоусадку и припаиваем коннектор XT60 в соответствии с обозначенной на нем полярностью (красный провод к +).
Теперь крепим моторы к раме парой винтов М3х10, подложив с обратной стороны шайбу. Просовывем в отверстие в раме провода от мотора, припаиваем их к ESC. Перед пайкой наденьте термоусадочные кембрики, но пока не усаживайте их, после проверки может понадобиться сменить направление вращения мотора, для этого нужно поменять местами любые два провода.
Выглядит в готовом виде это примерно так:

Ну вот, теперь можно проверить и настроить ESC и моторы.
Не надевая пропеллеры, подключаем к ресиверу в 3й канал — это Throttle в стандартной 4х канальной схеме (или серво-тестеру, если имеется), затем включаем передатчик (предварительно нужно связать их- bind, эта операция описана в инструкции). Подключаем аккумулятор к коннектору XT60. После писка от ESC плавно даем газ и проверяем, что мотор с ESC в порядке.
Повторяем процедуру для остальных моторов. Я бы заодно порекомендовал настроить тип батареи и скалибровать газ, но это можно и потом.
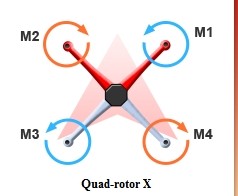
Проверяя моторы, обратите внимание на направление вращения. Нам нужно, чтобы два мотора напротив друг друга вращались в одну сторону, а соседние — в разные:

Поменять направление вращения мотора, напоминаю, можно поменяв местами любые 2 из трех проводов, которые идут к ESC. Можно сразу пронумеровать моторы по схеме соответственно направлению вращения и подписать карандашом на лучах.
Все вращается правильно и реагирует на ручку газа передатчика правильно? Замечательно, переходим к плате управления.
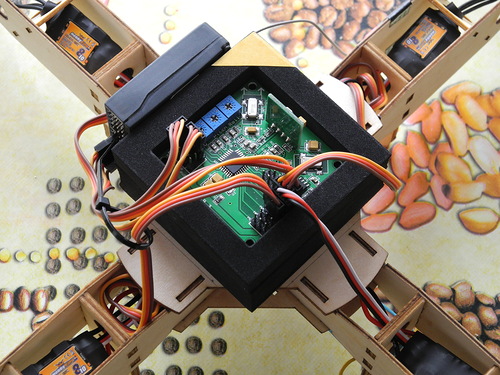
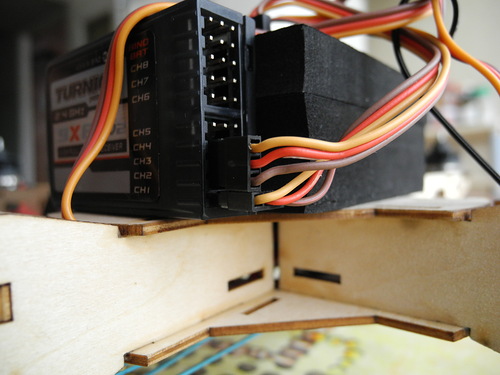
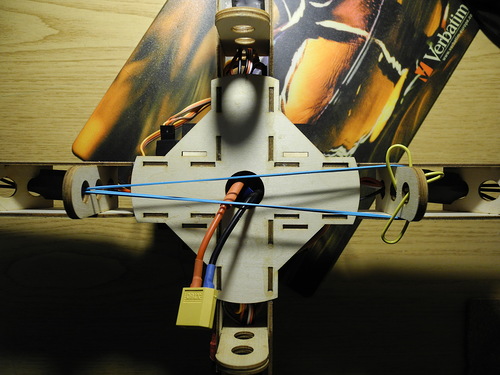
Она поставляется в мягком корпусе из пеноматериала. аккуратно ее извлекаем, переворачиваем и вставляем обратно, а мягкий корпус на двусторонний скотч или клей крепим на раму так, как указано на картинке выше, чтобы стрелка смотрела между лучами, на которых установленым моторы 1 и 2.
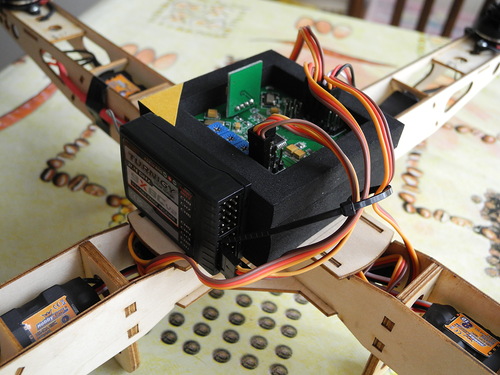
Сбоку к нему клеим на двусторонний скотч ресивер радиоаппаратуры (антенну крепим к одному из лучей):
Я наклеил стрелку на корпус, чтобы было легче ориентироваться на земле где у коптера перед.
Теперь подключаем мозги — скорее всего 2-3 из 4 ESC не достанут до платы управления, тут то и пригодятся servo extension кабели. Но их можно сделать самим. Нужна 3пиновая вилка из обычный PLS гребенки с шагом 2.54 ммм и половинка кабеля для соединения ресивера и платы управления (нам нужен Female коннектор).
Подключаем моторы соответственно нумерации в разъемы M1-М4
Сигнальный провод к центру платы, землю к краю (на предыдущей фото все видно).
Теперь подключаем ресивер. По умолчанию 4-х канальная настройка такая:
1 — Aileron (элероны, ROLL)
2 — Elevator (тангаж, PITCH)
3 — Throttle (газ)
4 — Rudder (руль направления, рыскание, YAW)
Вот и подключаем по порядку каналы к плате, на ней подписано соответственно AIL, ELE, THR, RUDD.
Только не 4 проводами, а проще: первый подключаем как положено — черный провод (земля) к краю платы, сигнальный внутрь, а остальные три канала подключаем одним проводом, нас интересует только сигнальный провод:
Все, осталось прикрепить батарею и коптер собран. Тут и настал черед резинки :)
Батарею при взвешивании просто положил сверху.

Осталось прошить плату управления и настроить коптер.
Для прошивки используем AVR ISP программатор. Подключение такое:
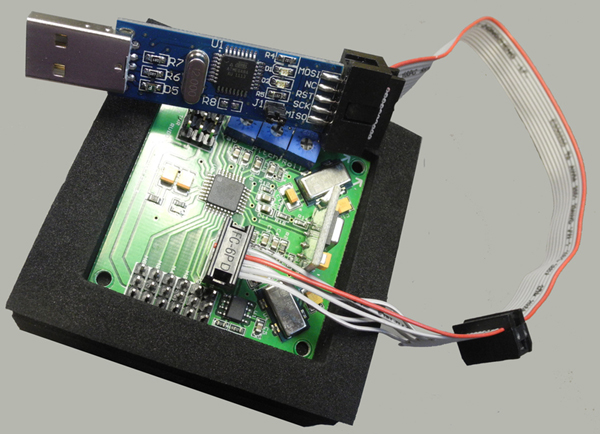
Т.к. плата является клоном Kaptein Kuk quadrokopter, можно воспользоваться их софтинкой (KKmulticopter Flash) для прошивки.
У меня стабильно заработала прошивка XXcontrol_KR_XCopter v2.5. Ее можно прошить с помощью avrdude:
avrdude -c usbasp -p m168p -U flash:w:XXcontrol_KR_XCopter_v2_5.hex:a
или выбрать в программульке для прошивки, она скачает сама.
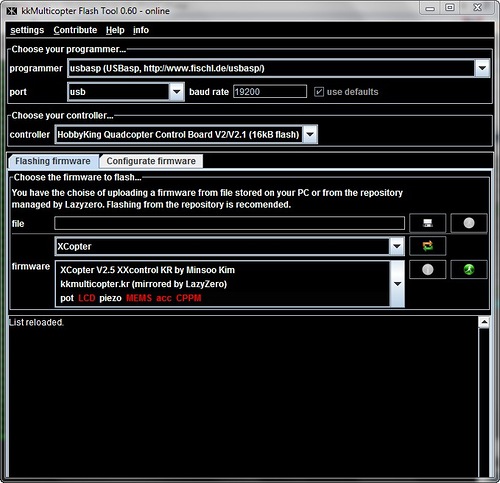
v4.7 от Kaptein Kuk у меня заработала некорректно, поэтому не советую ее.

Отключаем от программатора, выполняем настройку по инструкции (пункты 1, 2, 4 и 8, остальное по желанию).
Все, полетели :)
Взлетать советую медленно и очень осторожно. Сначала поставьте коптер стрелкой от себя, нужно попробовать приподнять коптер газом, если наклоняется или вращается, триммируем его, чтобы он взлетал без перекоса (попробуйте покачать аккуратно стиками элеронов и тангажа, буквально касаясь их, пока он еще на земле, чтобы убедиться, что все каналы работают правильно, если нет, инвертируйте нужные, у меня это был канал Elevator). Затем если он покачивается стиками правильно, чуть-чуть добавьте газа, чтобы взлетел на пару сантиметров, и опускайте обратно. Ну и дальше учимся летать :) (Я пока определил что к чему, сломал 2 пропеллера об стену — глюк прошивки v4.7, а потом еще в процессе настройки коэффициентов усиления гироскопов сломал еще пару — коптер раскачивался и задел диван, дома тесно, поэтому дома больше не летаю). Если не уверены или страшно — наденьте защитные очки и оденьтесь, пропеллеры бьют ощутимо, мне не попадало по рукам, но они острые и вращаются очень быстро!
Как освоите эту платформу, можно ставить свой контроллер или писать свою прошивку, добавлять акселерометры, барометр, компас, сонар, GPS, телеметрию, LPS лазер и делать из платформы робота. Но сначала получаем удовольствие, от винта, мы взлетели!
Удачных вам полетов!
Первое, что стоит сделать, если у вас младшая версия Naza - это перепрошить ее до возможностей старшей версии, как это сделать смотрите в статье Апгрейд Naza Lite до Naza V2.
Так же не лишнем будет скачать инструкцию для Naza тут.
Настройка
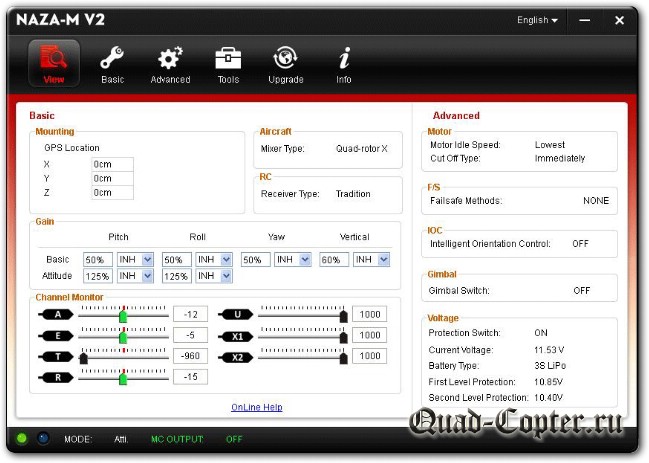
В стартовом окне запуска вы увидите основные настроенные параметры:
Перейдите сразу в меню Basic на вкладку Aircraft. На этой вкладке вы выбираете тип вашего мультикоптера. Базовый X тип обозначен красной рамкой.
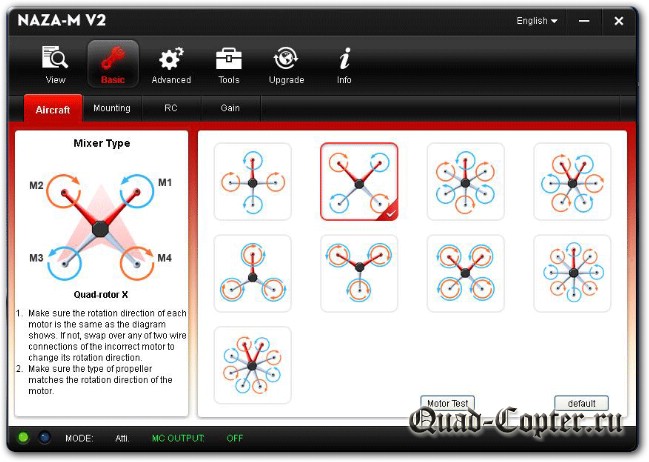
Обратите внимание на направление вращения двигателей. Оно должно строго соответствовать! Для проверки есть функция Motor Test. Она позволит на малый промежуток времени с небольшим газом запустить двигатели по отдельности.
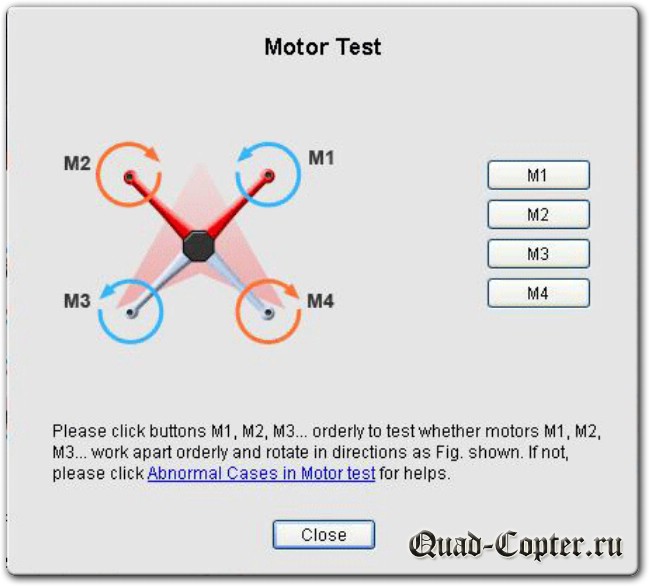
Внимание! Все проверки проводятся только со снятыми пропеллерами! Иначе можно получить реальную травму. Если какой то двигатель вращается в противоположную сторону - то поменяйте подключение 2-х проводов от двигателя к регулятору оборотов (ESC) между собой, это штатная процедура.
На вкладке Mounting задаются параметры установки GPS-антенны.

Полетный контроллер должен располагаться в геометрическом центре, там же должен быть центр тяжести (ЦТ). GPS антенну можно отнести вбок, тогда для нее задается смещение. Если антенна стоит над центром тяжести - то задаем только высоту Z.
Квадрокоптер может летать и имея смещенный ЦТ, но для первых полетов и настройки - сбалансируйте с помощью дополнительного груза.
Перейдите на вкладку RC. Здесь вы сможете настроить параметры системы радиоуправления.
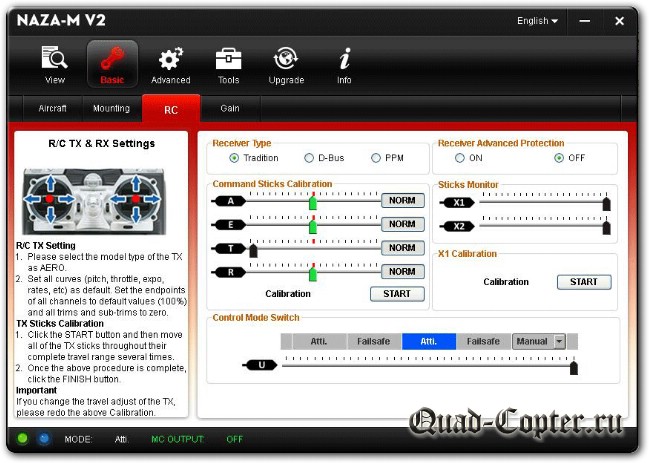
Здесь можно проверить работу системы радиоуправления. В центре экрана вы видите монитор стиков. Включите пульт и подвигайте стиками — ползунки должны двигаться в соответствии с вашими командами.
Диапазон сигналов пульта необходимо откалибровать. Для этого в поле Command Stick Calibration нажмите кнопку Start. Когда начнется процесс калибровки вам нужно будет покачать стики между крайними положениями и нажать Stop. После этого установите все стики в среднее положение и убедитесь что все ползунки тоже встали в среднее положение.
В этом окне есть мониторы дополнительных каналов. Их можно использовать для регулировки параметров управления, режимами управления и т.д.
На следующей вкладке Gain можно настроить остроту управления аппаратом.
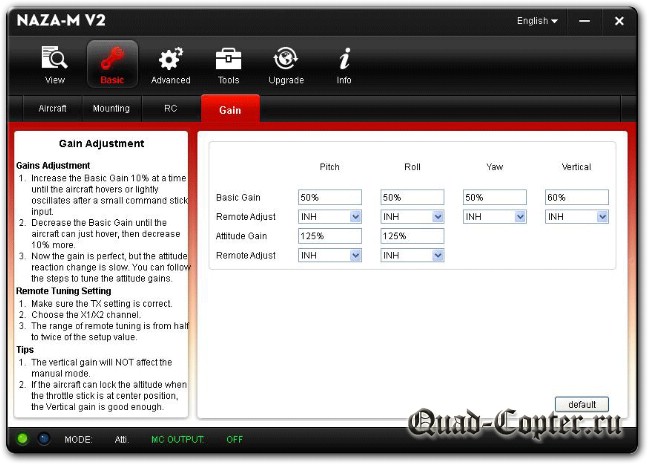
Basic Gain — реакция на стики по всем четырем каналам. Чем больше, тем резче будет коптер отрабатывать команды.
Attitude Gain — скорость реакции на внешний воздействия. Например, на дуновение ветра. Чем больше, тем интенсивнее коптер будет возвращаться на удерживаемую позицию.
Remote Adjust — удаленная настройка. Позволяет при использовании дополнительного канала управления подстраивать коэффициенты с пульта.
При первом полете рекомендуется оставить все эти коэффициенты без изменения. Со временем, вы наберетесь опыта и подстроите их под себя.
На этом выставление основных настроек закончено и вы можете приступить к первым полетам!
При подключении полётного контроллера DJI NAZA-M к конфигуратору DJI Issistant на операционной системе Windows 10 иногда можно столкнуться с проблемой, что конфигуратор не видит полётный контроллер и вы не можете произвести его настройку.
Проблема как правило заключается в стандартных драйверах Windows 10 и поэтому нам понадобится установить драйвера от официального производителя оборудования DJI, но особым способом.
Нам понадобится:
Установка драйвера DJI NAZA для Windows 10
Для удобства, перенесите разархивированный файл DJI_WIN_Driver_Installer.exe в корень вашего жесткого диска, в нашем случае это будет диск "C:\" и путь к файлу драйвера выглядит так:
C:\DJI_WIN_Driver_Installer.exe
У Вас это может быть другой диск или папка.

Это приложение заблокировано в целях защиты.
Для решения этой задачи запустите командную строку от имени администратора. Для этого вы можете начать вводить «Командная строка» в поиске на панели задач Windows 10, потом нажать правой кнопкой мыши по найденному результату и выбрать пункт «Запустить от имени администратора».

В командной строке введите путь к файлу драйвера с расширением .exe и нажмите Enter. В нашем случае мы заранее поместили файл драйвера в корень диска “C:\” и поэтому наш путь будет выглядеть так, если Вы поступили так же, то вам будет достаточно просто скопировать наш путь и вставить у себя в командную строку.
C:\DJI_WIN_Driver_Installer.exe

Как правило сразу после этого приложение будет запущено (не закрывайте командную строку до прекращения работы с программой или завершения ее установки, если не работал установщик).
Дальше установщик попросит Вас включить питание полётного контроллера и подключить его к вашему компьютеру с помощью USB (Please power on MC and connect it to PC via USB!). Подаём питание на наш полётный контроллер и соглашаемся с установщиком нажимая “Да”.

Как только выполнили требования установщика подав питание на полётный контроллер и подключив кабелем к USB, перед нами откроется обычный установщик программ, нажимаем далее

Установщик попросит указать папку куда будут установлены файлы нашего драйвера, по умолчанию путь к папке для установки.
В нашем случае путь установки файлов выглядит так:
C:\Program Files (x86)\DJI Product\DJI driver2.02
ВАЖНО запомните или лучше запишите этот путь, так как он нам понадобится в дальнейшем!

После того как выбрали место установки нажимаем далее и установить.
Когда установщик скопирует все файлы, запустится мастер установки драйверов устройств, нажимаем далее и готово.
Установка почти завершена и осталось только применить установленный драйвер к нашему полётноve контроллерe, но для этого нам придётся отключить в Windows 10 проверку цифровой подписи драйверов как показано ниже.
Отключение проверки цифровой подписи драйверов для Windows 10
Нажимаем кнопку “Пуск”, зажимаем клавишу Shift на клавиатуре и кликаем на иконку выключения (с зажатой клавишей) выбираем Перезагрузка, отпускаем Shift.

Далее на синем экране выбираем Диагностика (Возврат компьютера в исходное состояние или использование дополнительных средств)


Параметры загрузки и нажимаем кнопку перезагрузить.

Компьютер перезагрузится и появится экран Параметры загрузки, вам необходимо выбрать пункт:
7)Отключить обязательную проверку подписи драйверов

Компьютер еще раз перезагрузится, но уже в режиме отключения проверки подписи драйверов, что позволит нам применить к оборудованию дравера от производителя DJI. Теперь нам нужно в строке поиска Windows набрать “ Диспетчер Устройств” и найти наш подключенный полётный контроллер во вкладке “Порты (COM и LPT)”. В нашем случае это “устройство с последовательным интерфейсом USB (COM6)” у вас может быть другой порт. Чтобы проверить это отключите USB от полётного контроллера и проследите какое устройство пропадет из вкладки “Порты (COM и LPT)”.

Нажмите правой кнопкой на вашем устройстве и выберете пункт “Обновить драйвер”

Далее “Выполнить поиск драйверов на этом компьютере (Поиск и установка драйверов вручную)”

Потом выбираем "Выбрать драйвер из списка доступных драйверов на компьютере (В этом списке перечисляются все доступные драйверы, совместимые с данным устройством, а также драйверы для устройств той же категории."

Собрал свой первый коптер на NAZE V-2 благо выходные были больше. Сегодня состоялся 1й запуск, результатом доволен. Наза уже была прошита прошлым владельцем в версию — 2 . я только произвёл необходимые настройки под мой конфинг. Покупал полный комплект --Naza + GPS + OSD.

Летает очень хорошо. Точку в режиме gps держит — отлично. В режиме FS — ВОЗВРАЩАЕТСЯ НА ТОЧКУ ВЗЛЁТА. Проверил несколько раз — разница в районе погрешности --- 1-2 метра. Летал на батарейке 3S 5200 20С. время полёта при полной массе 1300 — 12 минут — приемлемо.
В качестве курсовой камеры Run-Cam -2, видео-передатчик FX799T мощностью 600 mW на 40 каналов 5.8ГГц. Антенна Black Mushroom V2 для FPV 5.8Ггц клеверная в корпусе.

Летал пока без подвеса --- ждёмс экшн камеру Xiaomi YI 4K 30 кадров WiFi.Может кто пользовался на квадрокоптерах такой? Как она в плане 4К и стабилизации видео.

Комментарии 8

Классный квад получился ! WIFi не получится использовать, задержки дикие, глушит управление и действует максимум на 30м . Про стабилизацию видео, рискну посоветовать лучше использовать постобработку (не так жрет качество и не тратит ресурсы камеры) например Pro pad Mercalli . А так все здорово, только вот что то со временем полета у Вас, я летаю на точно такой же батарее, но квад весит более1.7кг и хватает на 16 мин до разряда 10.8в.

Спасибо, WIFI — мне в полёте и не нужен.Интерес именно к- 4К. Ну типа — круто. Хотя меня и обычное HD — УСТРАИВАЕТ.
Батарейка старая. больше 4000 -4500 не заливается.
— Сегодня летал и поймал FS и чуть не обделался. он в этом режиме не управляется. пока не сядет.
Наверное Америки не открою, если скажу, что если при работающем режиме F/S включить режим Мануал, а потом опять, например ГПС, то управление вернется . Лучше попробуйте режим FullHD и 60FPS, очень красиво получается .
Завтра обязательно попробую. на АРМ привык подлетел связь во становилась и можно управлять дальше, а тут страшно стало, сам летит с растояния более 1 км, хорошо видео работало, видно всё было.
— камеру только заказал в Китае. ко мне она через недели 2-3 приедет. тогда и попробую.
АПМ еще по Yaw крутится в RTL, и вообще мне больше нравится как он летает, точнее что ли . Но управляемость для такого коптера не главное, так что не суть .

ВОТ --( ) чуть не стал последним. После краша 3 винта в мусор. осмотрел остальное не пострадало. камера слетела с площадки. . Установил новые винты — попробовал взлететь висит, летает, что было, глюк?!
Очень похоже на отстрел пропеллера . У дешевых пропов часто отлетают лопасти от нагрузки .

Аппаратура
Начинать я рекомендую с настройки аппаратуры( с последующей коррекцией после сборки), во избежание возможности взлета без настроек( есть пара случаев на памяти, итог которых паника и материальные потери)
Так выглядит в коробке
Само устройство
Устройство аппаратуры в двух словах:



*при включении вылетела ошибка или кракозябры.
Как лечить: все тумблеры нужно перевести в положение от себя.
*как войти в меню?
Зажмите кнопку MENU.
* как включить самолётный режим?
Войдите в меню, SYSTEM SETTING,TYPE SELETCT,ACRO.Для подтверждения нажмите кнопку меню. ( Хорошо, теперь выбран режим самолёта) Для справки: это режим работы аппаратуры, нужно выбирать его для нашего квадрокоптера.
* в разделе SYSTEM SETTING нужно выбрать STICK SET. Mode 2
Расшифровываю:
1 канал A- элероны
2 канал Е- элеватор
3й канал Т- газ
4й канал R- рудор( поворот по оси)
5-6 канал программируемые.
При выборе mode2 аппаратура вам предложить сделать реверс газа отказывайтесь, нажав EXIT.
Теперь нужно зайти в раздел FUNC SETTING.
Вам нужны будут следующие разделы:
E.POINT( на первой странице 1-2 столбцы)
AUX CH ( на второй странице 3-4 стобцы )
PROG.MIX ( на второй странице 3-4 стобцы )
Первоначально нужно зайти в AUX CH
* на 5й канал( Ch5 ) нужно установить GEAR ( двухпозиционник)
Следующий этап это настройка миксов( будут ниже)
И финально коррекция в E.POINT. (для переходов между конечными точками, щелкайте нужный тумблер, значение перескочит)
Теперь самое важное
Настройки аппы (Не мои,все права соблюдены)
Для стоковой прошивки
Я миксом сделал трехпозиционник и gear (в самолетном режиме. ), миксуем на gear три режима в «prog.mix», а gear на 5 канал вешаем (в aux-ch ), а 6 оставляем пустым, и вуаля, имеем двухпозиционник на 5 канале (gear) и трехпозиционник на 6 канале (U).
mix1:
state act
master gyr
slave flp
offset 000
uprate -100
dnrate 100
sw nor
mix2:
state act
master gyr
slave flp
offset 000
uprate 004(-56)
dnrate -004(16)
sw id1
mix3:
state act
master gyr
slave flp
offset 000
uprate 100 (-100)
dnrate -100(-70)
sw id2
Чтоб «посинели» «М» и «ЖПС» подогнал E.Point на 6ом канале (FLP) до 092% и 067%
Центр только не попадал в «А»
Подогнал в «mix2″ «dnrate» до «-013″. Посинела «А».
Автор:devv aka Евгений Дегтянников
В скобках моя коррекция под мой экземпляр.
От себя:
Реверс FLP ( трехпозиционный )
Коррекция в Е.Поинт
ФЛП по 96%
Гир 12% и 0%
Коррекцию в Е.Поинт и Микс( айрэйт и днрэйт) делайте под себя.

Перейдем к сборке.
Совет: не собирайте раму сразу полностью, не монтируйте верхнюю пластину.
Необходимые детали на данном этапе.
Вот так выглядит мотор и регулятор
Примерьте все на раму. Мне не хватило длины проводов от платы разводки питания до регуляторов.Пришлось удлинить
Использовал провод 14awg. Их сечения достаточно для проведения 20а.
В Квадрокоптере используются две пары моторов с взаимообратным вращением. Чтобы получить их нужно подключить моторы к регуляторам в следующей последовательности:
Используя такую схему вы получите две пары взаимообратно вращающихся мотора.
Следующим этапом проведите калибровку регуляторов( ESC )
Выполняется следующим образом. Пропеллеры не устанавливать. снять если установили)
1) Включить аппаратуру, переместить стик газа( левый) в верхнее положение.
2) Сигнальный провод регулятора воткнуть в 3й канал приёмника( для регуляторов с пометкой OPTO использовать убек.)
3) Подать питание на регулятор, подождать 1-3 сек и опустить речку газа вниз.
4) Подождать, регулятор пропищит. Поднять немного газ вверх, для проверки, потом должен запуститься. ( запомнить направление вращения, полный газ не давать)
5) Повторить с оставшимися связками.
Я припаял регуляторы к плате разводки питания, теперь можно выполнять монтаж на раму регуляторов и моторов.
Схема расположения моторов.
Теперь подключим приёмник к NAZA M LITE
Получится вот так:
Немного объяснений:
Naza имеет собственный конвертор питания, который будет подключаться к плате разводки питания.
От назы будет питаться приёмник, прошу не эксперементировать с питанием!
Или искать источник 5v.
Расскажу про режимы полета:
GPS — когда не трогаете пульт, висит в точке.
АТТI — удерживает высоту.
Manual — Нужен в экстренных ситуациях, когда коптер странно себя ведет( неполадки в ЖПС модуле или магнитометре)
Предсказываю комменты профи: для новичка мануал в других случаях не нужен.
Не расстраивайтесь, если коптер взлетает только на 50% газа — это фишка наза.
Более подробно вы можете узнать тут( не пренебрегайте инструкцией)
Для тех кто не заметил, такой БПЛА может убить человека при неправильной эксплуатации.
Пропеллеры в пике делают около200 оборотов в секунду(для моторов 980 оборот на вольт, при 3s батареи(12в), это мини газонокосилка. Пальцы срежет легко.
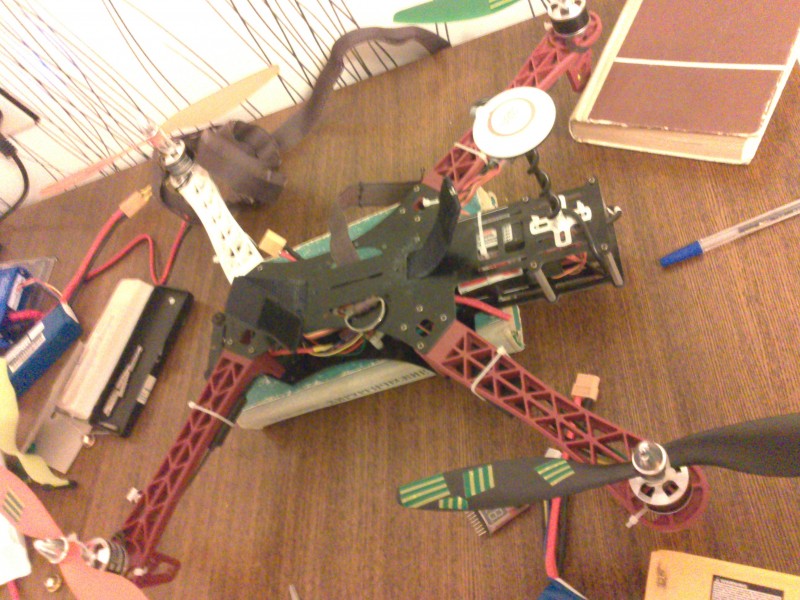
Готовый результат
Использую аккум 4400 3s2p — время полета без навесного оборудования 18 мин.

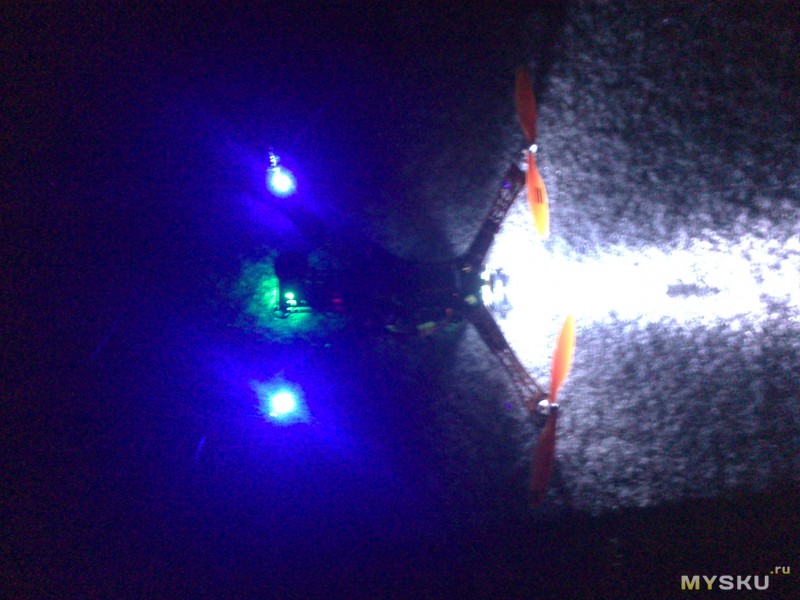
Своими руками собрал примитивную подсветку из диодов 5мм и старого фонаря, питание от 1s.
LED панель от фонарика установил курсовой фарой.
Получилось так





Со временем изменил подсветку, использовал LED ленту, питание 12в
Фото с подвесом
НЕ РЕКЛАМА.
Читайте также: