
Организация памяти компьютера простейшие схемы управления памятью
Обновлено: 04.07.2024
1) Схема с фиксированными разделами. Самым простым способом управления памятью является ее предварительное разбиение на несколько разделов фиксированной величины. Загружаемые процессы помещаются в один из разделов. Существенным недостатком схемы является внутренняя фрагментация, т.е. потеря части памяти, которая выделена процессу, но не используется им. Фрагментация возникает, если процесс не полностью использует раздел, либо раздел слишком мал для него.
2) Схема с переменными разделами. В этом случае изначально память свободна и не разделена на раздела. Вновь поступающие задачи выделяют необходимое количество памяти, не более. После выгрузки процесса память освобождается, в результате память представляет собой переменной число разделов разного размера. Смежные свободные участки могут быть объединены. Существуют 3 стратегии для размещения процессов в переменных разделах:
a) Стратегия первого подходящего. В этом случае процесс помещается в первый подходящий по размеру раздел.
b) Стратегия наиболее подходящего. Процесс помещается в раздел, в котором останется меньше всего свободного места.
c) Стратегия наименьшего подходящего. Процесс помещается в самый большой раздел, в котором останется место для еще одного процесса.
Для метода переменных разделов характерна внешняя фрагментация, т.е. наличие большого числа
участков неиспользуемой памяти, невыделенной ни одному процессу.
Выбор стратегии размещения слабо влияет на величину фрагментации. Наихудшем является метод наиболее подходящего.
4) Сегментно-страничная память. При сегментно-страничной организации памяти адрес является двумерным как для программиста, для и для ОС. Адрес состоит из номера сегмента и смещения внутри сегмента. Сегменты имеют переменный размер. Хранить в памяти сегменты большого размера также не эффективно, как хранить процесс непрерывным блоком, поэтому сегменты разбиваются на страницы. При сегментно-страничной организации памяти происходит двухуровневая трансляция логического адреса в физический. В этом случае логический адрес состоит из трех полей: номера сегмента, номера страницы внутри сегмента и смещения внутри страницы.
Главная задача компьютерной системы – выполнять программы. Программы вместе с данными, к которым они имеют доступ, в процессе выполнения должны (по крайней мере частично) находиться в оперативной памяти . Операционной системе приходится решать задачу распределения памяти между пользовательскими процессами и компонентами ОС. Эта деятельность называется управлением памятью. Таким образом, память (storage, memory) является важнейшим ресурсом, требующим тщательного управления. В недавнем прошлом память была самым дорогим ресурсом.
Часть ОС, которая отвечает за управление памятью, называется менеджером памяти.
Физическая организация памяти компьютера
Запоминающие устройства компьютера разделяют, как минимум, на два уровня: основную (главную, оперативную , физическую ) и вторичную (внешнюю) память.
Основная память представляет собой упорядоченный массив однобайтовых ячеек, каждая из которых имеет свой уникальный адрес (номер). Процессор извлекает команду из основной памяти , декодирует и выполняет ее. Для выполнения команды могут потребоваться обращения еще к нескольким ячейкам основной памяти . Обычно основная память изготавливается с применением полупроводниковых технологий и теряет свое содержимое при отключении питания.
Вторичную память (это главным образом диски) также можно рассматривать как одномерное линейное адресное пространство , состоящее из последовательности байтов. В отличие от оперативной памяти , она является энергонезависимой, имеет существенно большую емкость и используется в качестве расширения основной памяти .
Эту схему можно дополнить еще несколькими промежуточными уровнями, как показано на рис. 8.1. Разновидности памяти могут быть объединены в иерархию по убыванию времени доступа, возрастанию цены и увеличению емкости.
Рис. 8.1. Иерархия памяти
Многоуровневую схему используют следующим образом. Информация, которая находится в памяти верхнего уровня, обычно хранится также на уровнях с большими номерами. Если процессор не обнаруживает нужную информацию на i-м уровне, он начинает искать ее на следующих уровнях. Когда нужная информация найдена, она переносится в более быстрые уровни.
Локальность
Оказывается, при таком способе организации по мере снижения скорости доступа к уровню памяти снижается также и частота обращений к нему.
Ключевую роль здесь играет свойство реальных программ, в течение ограниченного отрезка времени способных работать с небольшим набором адресов памяти. Это эмпирически наблюдаемое свойство известно как принцип локальности или локализации обращений.
Свойство локальности (соседние в пространстве и времени объекты характеризуются похожими свойствами) присуще не только функционированию ОС, но и природе вообще. В случае ОС свойство локальности объяснимо, если учесть, как пишутся программы и как хранятся данные, то есть обычно в течение какого-то отрезка времени ограниченный фрагмент кода работает с ограниченным набором данных. Эту часть кода и данных удается разместить в памяти с быстрым доступом. В результате реальное время доступа к памяти определяется временем доступа к верхним уровням, что и обусловливает эффективность использования иерархической схемы. Надо сказать, что описываемая организация вычислительной системы во многом имитирует деятельность человеческого мозга при переработке информации. Действительно, решая конкретную проблему, человек работает с небольшим объемом информации, храня не относящиеся к делу сведения в своей памяти или во внешней памяти (например, в книгах).
Кэш процессора обычно является частью аппаратуры, поэтому менеджер памяти ОС занимается распределением информации главным образом в основной и внешней памяти компьютера. В некоторых схемах потоки между оперативной и внешней памятью регулируются программистом (см. например, далее оверлейные структуры ), однако это связано с затратами времени программиста, так что подобную деятельность стараются возложить на ОС.
Адреса в основной памяти , характеризующие реальное расположение данных в физической памяти , называются физическими адресами. Набор физических адресов, с которым работает программа, называют физическим адресным пространством .
Логическая память
Аппаратная организация памяти в виде линейного набора ячеек не соответствует представлениям программиста о том, как организовано хранение программ и данных. Большинство программ представляет собой набор модулей, созданных независимо друг от друга. Иногда все модули, входящие в состав процесса, располагаются в памяти один за другим, образуя линейное пространство адресов. Однако чаще модули помещаются в разные области памяти и используются по-разному.
Схема управления памятью, поддерживающая этот взгляд пользователя на то, как хранятся программы и данные, называется сегментацией. Сегмент – область памяти определенного назначения, внутри которой поддерживается линейная адресация. Сегменты содержат процедуры, массивы, стек или скалярные величины, но обычно не содержат информацию смешанного типа.
По-видимому, вначале сегменты памяти появились в связи с необходимостью обобществления процессами фрагментов программного кода (текстовый редактор, тригонометрические библиотеки и т. д.), без чего каждый процесс должен был хранить в своем адресном пространстве дублирующую информацию. Эти отдельные участки памяти, хранящие информацию, которую система отображает в память нескольких процессов, получили название сегментов . Память, таким образом, перестала быть линейной и превратилась в двумерную. Адрес состоит из двух компонентов: номер сегмента , смещение внутри сегмента . Далее оказалось удобным размещать в разных сегментах различные компоненты процесса (код программы, данные, стек и т. д.). Попутно выяснилось, что можно контролировать характер работы с конкретным сегментом , приписав ему атрибуты, например права доступа или типы операций, которые разрешается производить с данными, хранящимися в сегменте .
Рис. 8.2. Расположение сегментов процессов в памяти компьютера
Некоторые сегменты , описывающие адресное пространство процесса, показаны на рис. 8.2. Более подробная информация о типах сегментов имеется в лекции 10.
Большинство современных ОС поддерживают сегментную организацию памяти. В некоторых архитектурах (Intel, например) сегментация поддерживается оборудованием.
Адреса, к которым обращается процесс, таким образом, отличаются от адресов, реально существующих в оперативной памяти . В каждом конкретном случае используемые программой адреса могут быть представлены различными способами. Например, адреса в исходных текстах обычно символические. Компилятор связывает эти символические адреса с перемещаемыми адресами (такими, как n байт от начала модуля). Подобный адрес, сгенерированный программой, обычно называют логическим (в системах с виртуальной памятью он часто называется виртуальным) адресом. Совокупность всех логических адресов называется логическим (виртуальным) адресным пространством .
Связывание адресов
Итак логические и физические адресные пространства ни по организации, ни по размеру не соответствуют друг другу. Максимальный размер логического адресного пространства обычно определяется разрядностью процессора (например, 2 32 ) и в современных системах значительно превышает размер физического адресного пространства . Следовательно, процессор и ОС должны быть способны отобразить ссылки в коде программы в реальные физические адреса, соответствующие текущему расположению программы в основной памяти . Такое отображение адресов называют трансляцией (привязкой) адреса или связыванием адресов (см. рис. 8.3).
Связывание логического адреса, порожденного оператором программы, с физическим должно быть осуществлено до начала выполнения оператора или в момент его выполнения. Таким образом, привязка инструкций и данных к памяти в принципе может быть сделана на следующих шагах [Silberschatz, 2002].
Рис. 8.3. Формирование логического адреса и связывание логического адреса с физическим
За последнюю неделю дважды объяснял людям как организована работа с памятью в х86, с целью чтобы не объяснять в третий раз написал эту статью.
И так, чтобы понять организацию памяти от вас потребуется знания некоторых базовых понятий, таких как регистры, стек и тд. Я по ходу попробую объяснить и это на пальцах, но очень кратко потому что это не тема для этой статьи. Итак начнем.
Как известно программист, когда пишет программы работает не с физическим адресом, а только с логическим. И то если он программирует на ассемблере. В том же Си ячейки памяти от программиста уже скрыты указателями, для его же удобства, но если грубо говорить указатель это другое представление логического адреса памяти, а в Java и указателей нет, совсем плохой язык. Однако грамотному программисту не помешают знания о том как организована память хотя бы на общем уровне. Меня вообще очень огорчают программисты, которые не знают как работает машина, обычно это программисты Java и прочие php-парни, с квалификацией ниже плинтуса.
Так ладно, хватит о печальном, переходим к делу.
Рассмотрим адресное пространство программного режима 32 битного процессора (для 64 бит все по аналогии)
Адресное пространство этого режима будет состоять из 2^32 ячеек памяти пронумерованных от 0 и до 2^32-1.
Программист работает с этой памятью, если ему нужно определить переменную, он просто говорит ячейка памяти с адресом таким-то будет содержать такой-то тип данных, при этом сам програмист может и не знать какой номер у этой ячейки он просто напишет что-то вроде:
int data = 10;
компьютер поймет это так: нужно взять какую-то ячейку с номером стопицот и поместить в нее цело число 10. При том про адрес ячейки 18894 вы и не узнаете, он от вас будет скрыт.
Все бы хорошо, но возникает вопрос, а как компьютер ищет эту ячейку памяти, ведь память у нас может быть разная:
3 уровень кэша
2 уровень кэша
1 уровень кэша
основная память
жесткий диск
Это все разные памяти, но компьютер легко находит в какой из них лежит наша переменная int data.
Этот вопрос решается операционной системой совместно с процессором.
Вся дальнейшая статья будет посвящена разбору этого метода.
Архитектура х86 поддерживает стек.
Стек это непрерывная область оперативной памяти организованная по принципу стопки тарелок, вы не можете брать тарелки из середины стопки, можете только брать верхнюю и класть тарелку вы тоже можете только на верх стопки.
В процессоре для работы со стеком организованны специальные машинные коды, ассемблерные мнемоники которых выглядят так:
push operand
помещает операнд в стек
pop operand
изымает из вершины стека значение и помещает его в свой операнд
Стек в памяти растет сверху вниз, это значит что при добавлении значения в него адрес вершины стека уменьшается, а когда вы извлекаете из него, то адрес вершины стека увеличивается.
Теперь кратко рассмотрим что такое регистры.
Это ячейки памяти в самом процессоре. Это самый быстрый и самый дорогой тип памяти, когда процессор совершает какие-то операции со значением или с памятью, он берет эти значения непосредственно из регистров.
В процессоре есть несколько наборов логик, каждая из которых имеет свои машинные коды и свои наборы регистров.
Basic program registers (Основные программные регистры) Эти регистры используются всеми программами с их помощью выполняется обработка целочисленных данных.
Floating Point Unit registers (FPU) Эти регистры работают с данными представленными в формате с плавающей точкой.
Еще есть MMX и XMM registers эти регистры используются тогда, когда вам надо выполнить одну инструкцию над большим количеством операндов.
Рассмотрим подробнее основные программные регистры. К ним относятся восемь 32 битных регистров общего назначения: EAX, EBX, ECX, EDX, EBP, ESI, EDI, ESP
Для того чтобы поместить в регистр данные, или для того чтобы изъять из регистра в ячейку памяти данные используется команда mov:
mov eax, 10
загружает число 10 в регистр eax.
mov data, ebx
копирует число, содержащееся в регистре ebx в ячейку памяти data.
Регистр ESP содержит адрес вершины стека.
Кроме регистров общего назначения, к основным программным регистрам относят шесть 16битных сегментных регистров: CS, DS, SS, ES, FS, GS, EFLAGS, EIP
EFLAGS показывает биты, так называемые флаги, которые отражают состояние процессора или характеризуют ход выполнения предыдущих команд.
В регистре EIP содержится адрес следующей команды, которая будет выполнятся процессором.
Я не буду расписывать регистры FPU, так как они нам не понадобятся. Итак наше небольшое отступление про регистры и стек закончилось переходим обратно к организации памяти.
Как вы помните целью статьи является рассказ про преобразование логической памяти в физическую, на самом деле есть еще промежуточный этап и полная цепочка выглядит так:
Логический адрес --> Линейный (виртуальный)--> Физический
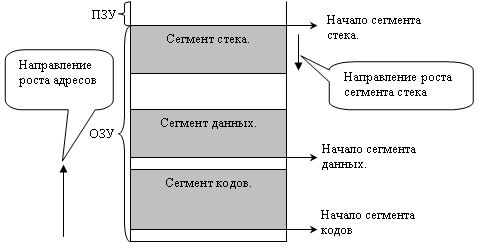
Все линейное адресное пространство разбито на сегменты. Адресное пространство каждого процесса имеет по крайней мере три сегмента:
Сегмент кода. (содержит команды из нашей программы, которые будут исполнятся.)
Сегмент данных. (Содержит данные, то бишь переменные)
Сегмент стека, про который я писал выше.
Линейный адрес вычисляется по формуле:
линейный адрес=Базовый адрес сегмента(на картинке это начало сегмента) + смещение
Сегмент кода
Базовый адрес сегмента кода берется из регистра CS. Значение смещения для сегмента кода берется из регистра EIP, в котором хранится адрес инструкции, после исполнения которой, значение EIP увеличивается на размер этой команды. Если команда занимает 4 байта, то значение EIP увеличивается на 4 байта и будет указывать уже на следующую инструкцию. Все это делается автоматически без участия программиста.
Сегментов кода может быть несколько в нашей памяти. В нашем случае он один.
Сегмент данных
Данные загружаются в регистры DS, ES, FS, GS
Это значит что сегментов данных может быть до 4х. На нашей картинке он один.
Смещение внутри сегмента данных задается как операнд команды. По дефолту используется сегмент на который указывает регистр DS. Для того чтобы войти в другой сегмент надо это непосредственно указать в команде префикса замены сегмента.
Сегмент стека
Используемый сегмент стека задается значением регистра SS.
Смещение внутри этого сегмента представлено регистром ESP, который указывает на вершину стека, как вы помните.
Сегменты в памяти могут друг друга перекрывать, мало того базовый адрес всех сегментов может совпадать например в нуле. Такой вырожденный случай называется линейным представлением памяти. В современных системах, память как правило так организована.
Теперь рассмотрим определение базовых адресов сегмента, я писал что они содержаться в регистрах SS, DS, CS, но это не совсем так, в них содержится некий 16 битный селектор, который указывает на некий дескриптор сегментов, в котором уже хранится необходимый адрес.
Так выглядит селектор, в тринадцати его битах содержится индекс дескриптора в таблице дескрипторов. Не хитро посчитать будет что 2^13 = 8192 это максимальное количество дескрипторов в таблице.
Вообще дескрипторных таблиц бывает два вида GDT и LDT Первая называется глобальная таблица дескрипторов, она в системе всегда только одна, ее начальный адрес, точнее адрес ее нулевого дескриптора хранится в 48 битном системном регистре GDTR. И с момента старта системы не меняется и в свопе не принимает участия.
А вот значения дескрипторов могут меняться. Если в селекторе бит TI равен нулю, тогда процессор просто идет в GDT ищет по индексу нужный дескриптор с помощью которого осуществляет доступ к этому сегменту.
Пока все просто было, но если TI равен 1 тогда это означает что использоваться будет LDT. Таблиц этих много, но использоваться в данный момент будет та селектор которой загружен в системный регистр LDTR, который в отличии от GDTR может меняться.
Индекс селектора указывает на дескриптор, который указывает уже не на базовый адрес сегмента, а на память в котором хранится локальная таблица дескрипторов, точнее ее нулевой элемент. Ну а дальше все так же как и с GDT. Таким образом во время работы локальные таблицы могут создаваться и уничтожаться по мере необходимости. LDT не могут содержать дескрипторы на другие LDT.
Итак мы знаем как процессор добирается до дескриптора, а что содержится в этом дескрипторе посмотрим на картинке:
Дескрипторы состоит из 8 байт.
Биты с 15-39 и 56-63 содержат линейный базовый адрес описываемым данным дескриптором сегмента. Напомню нашу формулу для нахождения линейного адреса:
линейный адрес = базовый адрес + смещение
[база; база+предел)
В зависимости от 55 G-бита(гранулярити), предел может измеряться в байтах при нулевом значении бита и тогда максимальный предел составит 1 мб, или в значении 1, предел измеряется страницами, каждая из которых равна 4кб. и максимальный размер такого сегмента будет 4Гб.
Для сегмента стека предел будет в интервале:
(база+предел; вершина]
Кстати интересно почему база и предел так рвано располагаются в дескрипторе. Дело в том что процессоры х86 развивались эволюционно и во времена 286х дескрипторы были по 8 бит всего, при этом старшие 2 байта были зарезервированы, ну а в последующих моделях процессоров с увеличением разрядности дескрипторы тоже выросли, но для сохранения обратной совместимости пришлось оставить структуру как есть.
Значение адреса «вершина» зависит от 54го D бита, если он равен 0, тогда вершина равна 0xFFF(64кб-1), если D бит равен 1, тогда вершина равна 0xFFFFFFFF (4Гб-1)
С 41-43 бит кодируется тип сегмента.
000 — сегмент данных, только считывание
001 — сегмент данных, считывание и запись
010 — сегмент стека, только считывание
011 — сегмент стека, считывание и запись
100 — сегмент кода, только выполнение
101- сегмент кода, считывание и выполнение
110 — подчиненный сегмент кода, только выполнение
111 — подчиненный сегмент кода, только выполнение и считывание
44 S бит если равен 1 тогда дескриптор описывает реальный сегмент оперативной памяти, иначе значение S бита равно 0.
Самым важным битом является 47-й P бит присутствия. Если бит равен 1 значит, что сегмент или локальная таблица дескрипторов загружена в оперативку, если этот бит равен 0, тогда это означает что данного сегмента в оперативке нет, он находится на жестком диске, случается прерывание, особый случай работы процессора запускается обработчик особого случая, который загружает нужный сегмент с жесткого диска в память, если P бит равен 0, тогда все поля дескриптора теряют смысл, и становятся свободными для сохранения в них служебной информации. После завершения работы обработчика, P бит устанавливается в значение 1, и производится повторное обращение к дескриптору, сегмент которого находится уже в памяти.
На этом заканчивается преобразование логического адреса в линейный, и я думаю на этом стоит прерваться. В следующий раз я расскажу вторую часть преобразования из линейного в физический.
А так же думаю стоит немного поговорить о передачи аргументов функции, и о размещении переменных в памяти, чтобы была какая-то связь с реальностью, потому размещение переменных в памяти это уже непосредственно, то с чем вам приходится сталкиваться в работе, а не просто какие-то теоретические измышления для системного программиста. Но без понимания, как устроена память невозможно понять как эти самые переменные хранятся в памяти.
В общем надеюсь было интересно и до новых встреч.
Чтобы обеспечить эффективный контроль использования памяти, ОС должна выполнять следующие функции:
- отображение адресного пространства процесса на конкретные области физической памяти;
- распределение памяти между конкурирующими процессами;
- контроль доступа к адресным пространствам процессов;
- выгрузка процессов (целиком или частично) во внешнюю память, когда в оперативной памяти недостаточно места;
- учет свободной и занятой памяти.
В следующих разделах лекции рассматривается ряд конкретных схем управления памятью. Каждая схема включает в себя определенную идеологию управления, а также алгоритмы и структуры данных и зависит от архитектурных особенностей используемой системы. Вначале будут рассмотрены простейшие схемы. Доминирующая на сегодня схема виртуальной памяти будет описана в последующих лекциях.
Простейшие схемы управления памятью
Первые ОС применяли очень простые методы управления памятью. Вначале каждый процесс пользователя должен был полностью поместиться в основной памяти , занимать непрерывную область памяти, а система принимала к обслуживанию дополнительные пользовательские процессы до тех пор, пока все они одновременно помещались в основной памяти . Затем появился "простой свопинг" (система по-прежнему размещает каждый процесс в основной памяти целиком, но иногда на основании некоторого критерия целиком сбрасывает образ некоторого процесса из основной памяти во внешнюю и заменяет его в основной памяти образом другого процесса). Такого рода схемы имеют не только историческую ценность. В настоящее время они применяются в учебных и научно-исследовательских модельных ОС, а также в ОС для встроенных (embedded) компьютеров.
Схема с фиксированными разделами
Самым простым способом управления оперативной памятью является ее предварительное (обычно на этапе генерации или в момент загрузки системы) разбиение на несколько разделов фиксированной величины. Поступающие процессы помещаются в тот или иной раздел. При этом происходит условное разбиение физического адресного пространства . Связывание логических и физических адресов процесса происходит на этапе его загрузки в конкретный раздел, иногда – на этапе компиляции.
Каждый раздел может иметь свою очередь процессов, а может существовать и глобальная очередь для всех разделов(см. рис. 8.4).
Эта схема была реализована в IBM OS/360 ( MFT ), DEC RSX-11 и ряде других систем.
Подсистема управления памятью оценивает размер поступившего процесса, выбирает подходящий для него раздел, осуществляет загрузку процесса в этот раздел и настройку адресов.
Рис. 8.4. Схема с фиксированными разделами: (a) – с общей очередью процессов, (b) – с отдельными очередями процессов
Очевидный недостаток этой схемы – число одновременно выполняемых процессов ограничено числом разделов.
Другим существенным недостатком является то, что предлагаемая схема сильно страдает от внутренней фрагментации – потери части памяти, выделенной процессу, но не используемой им. Фрагментация возникает потому, что процесс не полностью занимает выделенный ему раздел или потому, что некоторые разделы слишком малы для выполняемых пользовательских программ.
Один процесс в памяти
Частный случай схемы с фиксированными разделами – работа менеджера памяти однозадачной ОС. В памяти размещается один пользовательский процесс. Остается определить, где располагается пользовательская программа по отношению к ОС – в верхней части памяти, в нижней или в средней. Причем часть ОС может быть в ROM (например, BIOS, драйверы устройств). Главный фактор, влияющий на это решение, – расположение вектора прерываний, который обычно локализован в нижней части памяти, поэтому ОС также размещают в нижней. Примером такой организации может служить ОС MS-DOS.
Защита адресного пространства ОС от пользовательской программы может быть организована при помощи одного граничного регистра, содержащего адрес границы ОС.
Оверлейная структура
Так как размер логического адресного пространства процесса может быть больше, чем размер выделенного ему раздела (или больше, чем размер самого большого раздела), иногда используется техника, называемая оверлей (overlay) или организация структуры с перекрытием. Основная идея – держать в памяти только те инструкции программы, которые нужны в данный момент.
Потребность в таком способе загрузки появляется, если логическое адресное пространство системы мало, например 1 Мбайт (MS-DOS) или даже всего 64 Кбайта (PDP-11), а программа относительно велика. На современных 32-разрядных системах, где виртуальное адресное пространство измеряется гигабайтами, проблемы с нехваткой памяти решаются другими способами (см. раздел "Виртуальная память").
Рис. 8.5. Организация структуры с перекрытием. Можно поочередно загружать в память ветви A-B, A-C-D и A-C-E программы
Коды ветвей оверлейной структуры программы находятся на диске как абсолютные образы памяти и считываются драйвером оверлеев при необходимости. Для описания оверлейной структуры обычно используется специальный несложный язык (overlay description language). Совокупность файлов исполняемой программы дополняется файлом (обычно с расширением . odl ), описывающим дерево вызовов внутри программы. Для примера, приведенного на рис. 8.5, текст этого файла может выглядеть так:
Синтаксис подобного файла может распознаваться загрузчиком. Привязка к физической памяти происходит в момент очередной загрузки одной из ветвей программы.
Оверлеи могут быть полностью реализованы на пользовательском уровне в системах с простой файловой структурой. ОС при этом лишь делает несколько больше операций ввода-вывода. Типовое решение – порождение линкером специальных команд, которые включают загрузчик каждый раз, когда требуется обращение к одной из перекрывающихся ветвей программы.
Тщательное проектирование оверлейной структуры отнимает много времени и требует знания устройства программы, ее кода, данных и языка описания оверлейной структуры . По этой причине применение оверлеев ограничено компьютерами с небольшим логическим адресным пространством . Как мы увидим в дальнейшем, проблема оверлейных сегментов , контролируемых программистом, отпадает благодаря появлению систем виртуальной памяти.
Заметим, что возможность организации структур с перекрытиями во многом обусловлена свойством локальности, которое позволяет хранить в памяти только ту информацию, которая необходима в конкретный момент вычислений.
Динамическое распределение. Свопинг
Имея дело с пакетными системами , можно обходиться фиксированными разделами и не использовать ничего более сложного. В системах с разделением времени возможна ситуация, когда память не в состоянии содержать все пользовательские процессы. Приходится прибегать к свопингу (swapping) – перемещению процессов из главной памяти на диск и обратно целиком. Частичная выгрузка процессов на диск осуществляется в системах со страничной организацией (paging) и будет рассмотрена ниже.
Выгруженный процесс может быть возвращен в то же самое адресное пространство или в другое. Это ограничение диктуется методом связывания . Для схемы связывания на этапе выполнения можно загрузить процесс в другое место памяти.
Свопинг не имеет непосредственного отношения к управлению памятью, скорее он связан с подсистемой планирования процессов. Очевидно, что свопинг увеличивает время переключения контекста. Время выгрузки может быть сокращено за счет организации специально отведенного пространства на диске (раздел для свопинга). Обмен с диском при этом осуществляется блоками большего размера, то есть быстрее, чем через стандартную файловую систему. Во многих версиях Unix свопинг начинает работать только тогда, когда возникает необходимость в снижении загрузки системы.
Схема с переменными разделами
В принципе, система свопинга может базироваться на фиксированных разделах . Более эффективной, однако, представляется схема динамического распределения или схема с переменными разделами, которая может использоваться и в тех случаях, когда все процессы целиком помещаются в памяти, то есть в отсутствие свопинга. В этом случае вначале вся память свободна и не разделена заранее на разделы. Вновь поступающей задаче выделяется строго необходимое количество памяти, не более. После выгрузки процесса память временно освобождается. По истечении некоторого времени память представляет собой переменное число разделов разного размера (рис. 8.6). Смежные свободные участки могут быть объединены.
Рис. 8.6. Динамика распределения памяти между процессами (серым цветом показана неиспользуемая память)
В какой раздел помещать процесс? Наиболее распространены три стратегии.
- Стратегия первого подходящего (First fit). Процесс помещается в первый подходящий по размеру раздел.
- Стратегия наиболее подходящего ( Best fit ). Процесс помещается в тот раздел, где после его загрузки останется меньше всего свободного места.
- Стратегия наименее подходящего (Worst fit). При помещении в самый большой раздел в нем остается достаточно места для возможного размещения еще одного процесса.
Моделирование показало, что доля полезно используемой памяти в первых двух случаях больше, при этом первый способ несколько быстрее. Попутно заметим, что перечисленные стратегии широко применяются и другими компонентами ОС, например для размещения файлов на диске.
Типовой цикл работы менеджера памяти состоит в анализе запроса на выделение свободного участка (раздела), выборе его среди имеющихся в соответствии с одной из стратегий (первого подходящего, наиболее подходящего и наименее подходящего), загрузке процесса в выбранный раздел и последующих изменениях таблиц свободных и занятых областей. Аналогичная корректировка необходима и после завершения процесса. Связывание адресов может осуществляться на этапах загрузки и выполнения.
Этот метод более гибок по сравнению с методом фиксированных разделов , однако ему присуща внешняя фрагментация – наличие большого числа участков неиспользуемой памяти, не выделенной ни одному процессу. Выбор стратегии размещения процесса между первым подходящим и наиболее подходящим слабо влияет на величину фрагментации . Любопытно, что метод наиболее подходящего может оказаться наихудшим, так как он оставляет множество мелких незанятых блоков.
Статистический анализ показывает, что пропадает в среднем 1/3 памяти! Это известное правило 50% (два соседних свободных участка в отличие от двух соседних процессов могут быть объединены).
Одно из решений проблемы внешней фрагментации – организовать сжатие, то есть перемещение всех занятых (свободных) участков в сторону возрастания (убывания) адресов, так, чтобы вся свободная память образовала непрерывную область. Этот метод иногда называют схемой с перемещаемыми разделами. В идеале фрагментация после сжатия должна отсутствовать. Сжатие, однако, является дорогостоящей процедурой, алгоритм выбора оптимальной стратегии сжатия очень труден и, как правило, сжатие осуществляется в комбинации с выгрузкой и загрузкой по другим адресам.
Главная задача компьютерной системы – выполнять программы. Программы вместе с данными, к которым они имеют доступ, в процессе выполнения должны (по крайней мере частично) находиться в оперативной памяти. Операционной системе приходится решать задачу распределения памяти между пользовательскими процессами и компонентами ОС. Эта деятельность называется управлением памятью. Таким образом, память (storage, memory) является важнейшим ресурсом, требующим тщательного управления. В недавнем прошлом память была самым дорогим ресурсом.
Часть ОС, которая отвечает за управление памятью, называется менеджером памяти.
Физическая организация памяти компьютера
Запоминающие устройства компьютера разделяют, как минимум, на два уровня: основную(главную,оперативную,физическую) и вторичную (внешнюю) память.
Основная памятьпредставляет собой упорядоченный массив однобайтовых ячеек, каждая из которых имеет свой уникальный адрес (номер). Процессор извлекает команду изосновной памяти, декодирует и выполняет ее. Для выполнения команды могут потребоваться обращения еще к нескольким ячейкамосновной памяти. Обычноосновная памятьизготавливается с применением полупроводниковых технологий и теряет свое содержимое при отключении питания.
Вторичную память (это главным образом диски) также можно рассматривать как одномерное линейное адресное пространство, состоящее из последовательности байтов. В отличие отоперативной памяти, она является энергонезависимой, имеет существенно большую емкость и используется в качестве расширенияосновной памяти.
Эту схему можно дополнить еще несколькими промежуточными уровнями, как показано на рис. 8.1. Разновидности памяти могут быть объединены виерархиюпо убыванию времени доступа, возрастанию цены и увеличению емкости.

Рис. 8.1. Иерархия памяти
Многоуровневую схему используют следующим образом. Информация, которая находится в памяти верхнего уровня, обычно хранится также на уровнях с большими номерами. Если процессор не обнаруживает нужную информацию на i-м уровне, он начинает искать ее на следующих уровнях. Когда нужная информация найдена, она переносится в более быстрые уровни.
Оказывается, при таком способе организации по мере снижения скорости доступа к уровню памяти снижается также и частота обращений к нему.
Ключевую роль здесь играет свойство реальных программ, в течение ограниченного отрезка времени способных работать с небольшим набором адресов памяти. Это эмпирически наблюдаемое свойство известно как принцип локальностиили локализации обращений.
Свойство локальности (соседние в пространстве и времени объекты характеризуются похожими свойствами) присуще не только функционированию ОС, но и природе вообще. В случае ОС свойство локальности объяснимо, если учесть, как пишутся программы и как хранятся данные, то есть обычно в течение какого-то отрезка времени ограниченный фрагмент кода работает с ограниченным набором данных. Эту часть кода и данных удается разместить в памяти с быстрым доступом. В результате реальное время доступа к памяти определяется временем доступа к верхним уровням, что и обусловливает эффективность использования иерархическойсхемы. Надо сказать, что описываемая организация вычислительной системы во многом имитирует деятельность человеческого мозга при переработке информации. Действительно, решая конкретную проблему, человек работает с небольшим объемом информации, храня не относящиеся к делу сведения в своей памяти или во внешней памяти (например, в книгах).
Кэш процессора обычно является частью аппаратуры, поэтому менеджер памяти ОС занимается распределением информации главным образом в основнойи внешней памяти компьютера. В некоторых схемах потоки междуоперативнойи внешней памятью регулируются программистом (см. например, далееоверлейные структуры), однако это связано с затратами времени программиста, так что подобную деятельность стараются возложить на ОС.
Адреса в основной памяти, характеризующие реальное расположение данных вфизической памяти, называются физическими адресами. Набор физических адресов, с которым работает программа, называют физическимадресным пространством.
Аппаратная организация памяти в виде линейного набора ячеек не соответствует представлениям программиста о том, как организовано хранение программ и данных. Большинство программ представляет собой набор модулей, созданных независимо друг от друга. Иногда все модули, входящие в состав процесса, располагаются в памяти один за другим, образуя линейное пространство адресов. Однако чаще модули помещаются в разные области памяти и используются по-разному.
Схема управления памятью, поддерживающая этот взгляд пользователя на то, как хранятся программы и данные, называется сегментацией. Сегмент– область памяти определенного назначения, внутри которой поддерживается линейная адресация.Сегментысодержат процедуры, массивы, стек или скалярные величины, но обычно не содержат информацию смешанного типа.
По-видимому, вначале сегментыпамяти появились в связи с необходимостью обобществления процессами фрагментов программного кода (текстовый редактор, тригонометрические библиотеки и т. д.), без чего каждый процесс должен был хранить в своемадресном пространстведублирующую информацию. Эти отдельные участки памяти, хранящие информацию, которую система отображает в память нескольких процессов, получили названиесегментов. Память, таким образом, перестала быть линейной и превратилась в двумерную. Адрес состоит из двух компонентов: номерсегмента, смещение внутрисегмента. Далее оказалось удобным размещать в разныхсегментахразличные компоненты процесса (код программы, данные, стек и т. д.). Попутно выяснилось, что можно контролировать характер работы с конкретнымсегментом, приписав ему атрибуты, например права доступа или типы операций, которые разрешается производить с данными, хранящимися всегменте.

Рис. 8.2. Расположение сегментов процессов в памяти компьютера
Некоторые сегменты, описывающиеадресное пространствопроцесса, показаны нарис. 8.2. Более подробная информация о типахсегментовимеется в лекции 10.
Большинство современных ОС поддерживают сегментную организацию памяти. В некоторых архитектурах (Intel, например) сегментация поддерживается оборудованием.
Адреса, к которым обращается процесс, таким образом, отличаются от адресов, реально существующих в оперативной памяти. В каждом конкретном случае используемые программой адреса могут быть представлены различными способами. Например, адреса в исходных текстах обычно символические. Компилятор связывает эти символические адреса с перемещаемыми адресами (такими, как n байт от начала модуля). Подобный адрес, сгенерированный программой, обычно называют логическим (в системах с виртуальной памятью он часто называется виртуальным) адресом. Совокупность всех логических адресов называется логическим (виртуальным)адресным пространством.
Итак логические и физические адресные пространствани по организации, ни по размеру не соответствуют друг другу. Максимальный размер логическогоадресного пространстваобычно определяется разрядностью процессора (например, 2 32 ) и в современных системах значительно превышает размер физическогоадресного пространства. Следовательно, процессор и ОС должны быть способны отобразить ссылки в коде программы в реальные физические адреса, соответствующие текущему расположению программы восновной памяти. Такое отображение адресов называюттрансляцией (привязкой) адресаилисвязыванием адресов(см.рис. 8.3).
Связываниелогического адреса, порожденного оператором программы, с физическим должно быть осуществлено до начала выполнения оператора или в момент его выполнения. Таким образом, привязка инструкций и данных к памяти в принципе может быть сделана на следующих шагах [Silberschatz, 2002].
Этап загрузки (Load time). Если информация о размещении программы на стадии компиляции отсутствует, компилятор генерирует перемещаемый код. В этом случае окончательное связывание откладывается до момента загрузки. Если стартовый адрес меняется, нужно всего лишь перезагрузить код с учетом измененной величины.
Этап выполнения (Execution time). Если процесс может быть перемещен во время выполнения из одной области памяти в другую, связывание откладывается до стадии выполнения. Здесь желательно наличие специализированного оборудования, например регистров перемещения. Их значение прибавляется к каждому адресу, сгенерированному процессом. Большинство современных ОС осуществляет трансляцию адресов на этапе выполнения, используя для этого специальный аппаратный механизм (см. лекцию 9).

Рис. 8.3. Формирование логического адреса и связывание логического адреса с физическим
Читайте также: