
Pcan explorer 5 где
Обновлено: 06.07.2024
В пятом поколении Explorer лишился рамы и понижающей передачи в раздатке.
В 2012 году в Елабуге открыли производство по полному циклу (кроме главных агрегатов).
Все официально проданные у нас машины — семиместные. Дважды освежали внешность и набор оборудования. В 2015‑м для России мотор V6 дефорсировали с 290 до более выгодных по налогу 249 л.с.
Достоинства
- Оснащение и комфорт, близкие к премиальному, при «обычной» цене.
- Отличная подвеска.
- Разумная стоимость полиса каско.
- Тесный второй ряд сидений.
- Неуместная экономия на газовых упорах капота, обогреве стекла и шторке багажника.
- Топливный бак объемом 68 л откровенно мал.
Моторы
Атмосферный бензиновый Duratec V6 3.5 (290 или 249 л.с.) очень надежен. Опасных недугов не выявлено. При хорошем обслуживании и чистом топливе живет свыше 400 тысяч км, при этом АИ‑92 приемлем. Ресурс цепи ГРМ — свыше 200 тысяч, но ее натяжитель и приводимую ею помпу надо проверять после 100–120 тысяч км. Плохой бензин быстро засоряет дроссельную заслонку и возбуждает кислородные датчики нейтрализатора на «Check engine!». Масложор стартует после 150 тысяч км — часто достаточно поменять маслосъемные колпачки. Каждые 100 тысяч км требуется регулировка клапанов.
EcoBoost 2.3 (280 л.с.) сравнительно молод и у нас представлен в единичных экземплярах. Сведений о нем немного, но масло он начинает есть намного раньше — в том числе из-за непосредственного впрыска. Дополнительные хлопоты предоставит новая система наддува. Хотя обещан тот же ресурс в 300–400 тысяч км.
Коробки передач
Шестиступенчатый гидроавтомат серии 6F50/6F55 (идентичен «джиэмовскому» 6T70/6T75) рассчитан на большой крутящий момент. Славится надежностью и ресурсом в 250 тысяч км. Грязное масло ускоряет износ колец, уплотнителей, втулок и убивает соленоиды. Рабочую жидкость в идеале надо менять каждые 30–40 тысяч км.
Муфта Haldex, передающая момент на заднюю ось, надежна и умеет отключаться, если чувствует опасность перегрева. Explorer довольно много может на бездорожье, однако регулярные упражнения прикончат раздатку, а проблемы начнутся с течей. Наивно считать ее необслуживаемой — надо менять масло.
Эксплуатационные болячки
- Стойки стабилизатора — расходники, в остальном подвеска крепкая и обычно требует масштабной ревизии после 100 тысяч км. В рулевом механизме быстро изнашиваются фиксаторы пыльников тяг — за ними надо следить.
- Есть претензии к свету: фары расположены слишком высоко, рассеиватель неудачный, противотуманки потеют, трескаются и могут выпасть из-за хлипкого крепления.
- Обилие электронных систем и помощников порождает различные сбои и глюки. Чаще всего хандрят климат-контроль (привод заслонки) и ассистент парковки.
- Кузову недостает жесткости. При перекосах иногда блокируется электропривод задней двери с ограничителем усилия. Также развиваются течи на стыке крыши и задней панели, где постепенно рассыхается герметик.
Euro NCAP: не проводился
Самое массовое предложение на вторичке: Explorer 3.5 АКП
Оптимальный выбор: Explorer 3.5 АКП
За те же деньги: Hyundai Santa Fe, Honda CR-V, Mercedes-Benz GLK, Mitsubishi Pajero, Volvo XC60
В программном пакете CANopen Source каждому объекту (Process Data Object (PDO) - данных процесса, Service Data Object (SDO) - данных сервиса, Emergency (EMC) - контроль аварийных ситуаций, Synchronization (SYNC) - синхронизация, Object Dictionary (OBD) - словарь объектов, Network Management (NMT) - управление сетью и Distributor (DBT) - дистрибьютор) соответствует свой программный модуль. Основные свойства CANopen Source перечислены ниже:
Требуемые ресурсы не зависят от типа МК, размера Object Dictionary, конфигурации CANopen: ROM >= 32kByte, RAM >= 2kByte
Поддержаны платформы:
Поддержаны интерфейсы CAN-PC:
- PCAN-PCI (PCI-Card)
- USB-CANmodul (USB)
- USB-CANmodul2 (USB)
- PCAN-Dongle (Printerport)
PCAN Explorer 4, PCAN Explorer 5

CAN-REport - CAN-bus Analyser
CAN-REport - это ПО для мониторинга и анализа CAN-шины, которое позволит вам наблюдать, записывать и оценивать коммуникации по CAN шине на логическом уровне. Благодаря гибкости и расширяемости пользовательского интерфейса, CAN-REport может быть адаптирован к требованиям заказчика. CAN-телеграммы можно наблюдать онлайн в различных режимах и хранить в файле для последующей обработки.
У вас также есть возможность отправки CAN-телеграмм вручную, циклически или последовательно, используя CAN-REport. Количество доступных каналов передачи свободно конфигурируется. Функция записи в CAN-REport может быть вызвана CAN-телеграммой. Кроме того, пред- и пост-запуск могут быть идентифицированы. Это позволяет получать актуальную информацию с высочайшей точностью. Когда это сделано, CAN-телеграммы могут быть интерпретированы CAN-REport и его расширениями во время записи. Отложенная обработка ранее сохраненной информации также возможна.
CAN-Report имеет расширяемый интерфейс визуализации. Таким образом, функциональность CAN-REport может быть специально расширена за счет дополнительных программных модулей. Примером этого является сервис- или протокол - зависимое представление CAN-телеграмм. Дополнительные модули доступны для протоколов CANopen и DeviceNet и реализуют служебно-зависимое представление CAN телеграмм. Подробные CANopen телеграммы отображаются отдельно в соответствии с SDO, PDO, NMT, EMCY в отдельных окнах.
CANopen Configuration Suite
C ANopen Configuration Suite представляет собой высокопроизводительный и легкий в использовании инструмент для эффективного и простого планирования CANopen сетей, а также оборудования. Он сочетает в себе функциональность с интуитивно понятным управлением и помогает вам на всех этапах проекта, включая планирование, разработку, запуск и обслуживание. Вы можете сосредоточиться непосредственно на вашей разработке и определении параметров системы. CANopen Configuration Suite включает в себя CANopen Configuration Manager, монитор устройств CANopen и поставляется с CAN-драйвером SYSTEC для эксклюзивного доступа к различным CAN интерфейсам.
Полная поддержка CiA 405
В дополнение к конфигурации и взаимосвязи чистых CANopen ведомых устройств, CANopen Configuration Suite также поддерживает DS 405, совместимые программируемые устройства. Все назначенные сетевые переменные экспортируются в МЭК 61131-3 - совместимом виде. Это позволяет легко перевести вашу разработку в используемую вами среду IEC 61131. Модульность и расширяемость - особые черты CANopen Configuration Suite. Встроенная возможность написания скриптов позволяет осуществить гибкую адаптацию конфигурируемого интерфейса, а также добавить новую функциональность.
Расширенная поддержка оборудования
SYSTEC предлагает индивидуальную поддержку аппаратного обеспечения для интерфейсов CAN-шины различных производителей. Вы не ограничены конкретным поставщиком. CANopen Configuration Suite значительно сокращает затраты по конфигурированию, характерные для больших систем. Риск ошибок конфигурирования сведена к минимуму, что повышает качество и безопасность системы.
- Проектно-ориентированное конфигурирование сети, основанное на CANopen EDS и DCF файлах
- Импорт конфигурационных файлов CANopen, созданных сторонними средствами
- Поддержка загрузки конфигурации сети/устройства по CAN-шине
- Легкое внедрение благодаря простому и интуитивно понятному пользовательскому интерфейсу
- Быстрый доступ к параметрам устройства и структуре сети
- Автоматическое отображение и сопряжение PDO
- Упрощенное сопряжение PDO на основе предопределенного набора соединений, не требует реконфигурации CANopen slave устройств
- Селективное сканирование разделов каталога объектов непосредственно через CAN-шину
- Автоматическое сканирование сети обнаруживает все узлы CANopen на шине
- Поддержка динамических объектов и переменных сети в соответствии с CiA 302 и CiA 405
- Экспорт сетевых переменных как IEC 61131-3 variable declaration
- Возможность написания скриптов с CANopen master API верхнего уровня
- Сетевой переход CANopen/Ethernet в соответствии с CiA 309-3 включен
- Режим эксперта в окне консоли для доступа к сервисам CANopen через командную строку
CANopen Master & Slave Source Code CiA 301
CANopen source code реализует полную функциональность в соответствии со стандартом CiA 301. CANopen source code поддерживает быстрый и совместимый со стандартом дизайн собственных полнофункциональных CANopen ведущих или ведомых устройств, в том числе NMT мастер (Network Management), LSS мастера (Layer Настройка услуг) или клиента SDO.
CANopen source code подготовлен для легкой интеграции в операционные системы. Строго определенная и тщательно продуманная API позволяет легко использовать CANopen services без погружения в детали реализации. Множество примеров программ, специально ориентированных на демонстрационные проекты, а также исчерпывающая документация помогут вам в реализации ваших задач.

Цель этой статьи — рассказать о моём опыте модификации автомобиля и экспериментах с шиной CAN.
Сначала я решил добавить фронтальную камеру в свой 2017 Chevrolet Cruze. Поскольку у автомобиля уже есть заводская камера заднего вида, то на высоком уровне нужно было выяснить две вещи:
- Способ передачи видео с фронтальной камеры, которую я добавлю.
- Способ отображения на экране картинки с камеры заднего вида в любое время.
Запуск на экране оказался более сложным, и после некоторого расследования я пришёл к выводу, что машина должна подавать сигнал от камеры заднего вида на экран через какую-то шину данных.
У Chevrolet две разные шины данных. Первая — это стандартная CAN, быстрая (500 Кбит/с) и надёжная, она используется для критических данных. Вторая — то, что GM называет LAN (GMLAN), более старая и медленная шина (33,3 Кбит/с), которая используется для данных, не связанных с безопасностью.
Мне нужен был способ прослушивать трафик по CAN, то есть снифер. Для этой цели невероятно полезно устройство PCAN.

Peak Can
Поскольку камера заднего вида менее важна для безопасности, чем другие компоненты, я предположил, что искомые данные, скорее всего, будут на шине GMLAN.
Самая простая точка доступа — разъём OBD2. Я подключил Peak Can к шине GMLAN, запустил программное обеспечение — и сразу началось прослушивание трафика.
Впрочем, я не планировал постоянно ездить с ноутбуком. Нужен был способ автоматизировать эти функции — и здесь пригодилась Arduino. Возможность напрямую получать питание 12V в сочетании с большим количеством ресурсов и поддержки в интернете сделала этот выбор очевидным.
В дополнение к Arduino для завершения проекта мне понадобилось два компонента: модуль CAN и модуль реле. По сути, Arduino — это мозг, запускающий и выполняющий код. Модуль CAN предоставляет возможность взаимодействовать с шиной данных, а реле обеспечивает питание фронтальной камеры, а также действует как видеомикшер между ней и камерой заднего вида.

Модуль mcp2515 (сверху), Arduino Uno (посередине), модуль реле (снизу)
После добавления и настройки соответствующих библиотек Arduino установил связь с автомобилем.
Прослушивание трафика через Arduino
Поскольку я уже знал, что могу запустить дисплей, то начал думать о том, КАК это сделать. Первоначальная идея состояла в том, чтобы установить на панели специальную кнопку мгновенного вызова, но я начал думать: «А что ЕЩЁ в сети можно использовать в качестве триггера?»
Распознавание однократного нажатия кнопки
Однако я не хотел, чтобы камера активировалась каждый раз, когда я отменяю круиз-контроль, поэтому я решил, что лучший подход — превратить её (по сути) в многофункциональную кнопку. Камера активируется только в том случае, если кнопка «дважды нажата».
После долгого уикенда изучения функции millis и отладки кода я успешно запрограммировал распознавание двойного нажатия.
Распознавание двойного нажатия
И когда я привязал его к своим командам для управления дисплеем, у меня собралась довольно крутая небольшая утилита.
Двойное нажатие + команды
Теперь у меня была возможность включать и выключать дисплей, но оставалась одна проблема — что насчёт камеры заднего вида? Мне нужно было, чтобы они с фронтальной камерой работали вместе, словно их так настроили на заводе.
На блок-схеме я изобразил, как я это представляю.
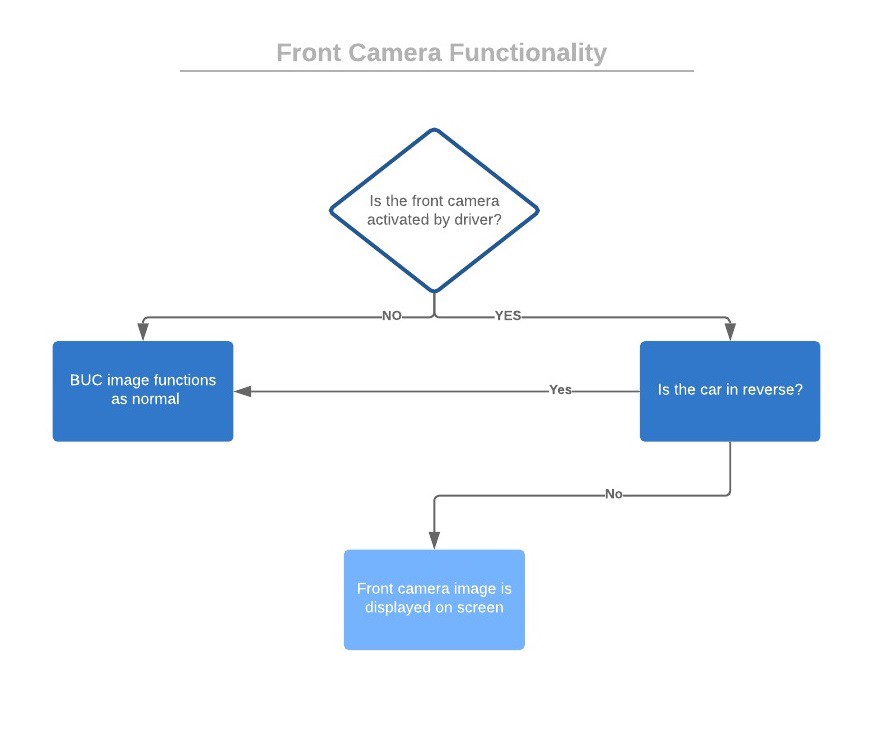
Я быстро понял, что для такой системы нужно в любой момент времени знать состояние трёх переменных:
- Модуль передней камеры: водитель включил или выключил его?
- Дисплей камеры: изображение на дисплее включено или выключено?
- Задний ход: автомобиль в реверсе или нет?
В конце концов, я добился успеха!
Активный мониторинг
Теперь я смог реализовать операционную логику, которая контролирует реле.
Управление через реле
На протяжении всего процесса я всё больше узнавал об Arduino и заметил, что версия Nano способна делать всё, что нужно, при этом у неё меньший размер и более низкая цена. Она идеально подходит для постоянной установки в автомобиль. Я разработал модель и распечатал на 3D-принтере корпус для размещения компонентов в качестве компактного блока для установки.

3D корпус

Наконец настал день, когда я увидел результаты. Хотя нужно ещё повозиться с таймингом, но было приятно видеть, что модуль корректно работает.
Включение/выключение режима парковки, включение/выключение фронтальной камеры, автоматическое переключение на камеру заднего вида и автоматическое переключение обратно
В целом, этот опыт меня многому научил и открыл глаза на возможности интеграции непосредственно с шиной CAN. Довольно удивительно, чего можно достичь соединением по двум проводам.

Интерфейсная карта PCAN-USB облегчает доступ к сети CAN. Он имеет компактный и компактный пластиковый корпус, который особенно подходит для переноски. IPEH-002022 поддерживает напряжение изоляции до 500VDC между ПК и Can-шиной. Предоставляет тестовое программное обеспечение PCAN-View; Предоставляет различные драйверы операционной системы и интерфейсы программирования, пользователи могут легко писать свое собственное программное обеспечение для доступа к шине can.
Характеристика
Адаптер интерфейса USB, полноскоростной режим, совместим с USB1.1, USB.0 и USB3.0
Скорость передачи данных поддерживает 5 кбит/с
Разрешение отметки времени составляет приблизительно 42 мкс
Соответствие может спецификации 2.0A (11-bitID) и 2.0B (29-битная ID)
Может соединить спецификации D-Sub, 9-pin (согласно CiA® 303-1)
SJA1000 CAN контроллер, частота часов 16 МГц
PCA82C251 CAN трансивер
Изолированные модели поддерживают напряжение изоляции до 500VDC между ПК и Can-шиной
5V Выход расширения источника питания на CAN коннекторе (может быть включен путем подключения внутреннего паяльного моста)
Питание от USB интерфейса
Диапазон рабочих температур от-40 до 85 °C (от-40 до 185 °F)
Интерфейсная карта PCAN-USB доступна в изолированных и неизолированных версиях. Изолированная версия IPEH-002022, а неизолированная версия IPEH-002021.
PCAN-USB Руководство китайской версии
Инструкции по программному обеспечению PCAN-View китайская версия
Драйвер устройства для Linux: драйвер устройства под Linux, версия ядра 2,6 и выше
PCAN-Basic API: API для вторичной разработки приложений CAN и CAN FD на базе® 10, 8,1, 7 (32/64 бит)
PCAN-Basic API (Linux): API для вторичной разработки приложений CAN и CAN FD на базе Linux (32/64 бит)
Инструмент для расчета скорости бит: CAN и CAN FD калькулятор скорости передачи данных для Android, iOS и®
Вторичная развивающаяся посылка ApIs, которая предоставляет стандартные спецификации для автомобильной промышленности:
PCAN-CCP API: API реализация протокола калибровки CAN (CCP)
PCAN-XCP API: API реализация универсального протокола измерения и калибровки (XCP)
PCAN-PassThru API: API реализация протокола PassThrub (SAE J2534)
PCAN-ISO-TP API: API реализация протокола ISO-TP (ISO 15765-2)
PCAN-UDS API: API реализация протокола UDS (ISO 14229-1)
PCAN-OBD-2 API: API реализация протокола OBD-2 (ISO 15765-4)
PCAN-View оснащен интерфейсной картой PCAN PC или картой серии LCUSB-131A CAN, которая может быстро и удобно завершить инициализацию оборудования. Все доступные карты могут быть перечислены в окне подключения оборудования. После выбора аппаратного обеспечения и скорости передачи данных пользователь может использовать все функции программного обеспечения.
Начиная с версии 4, PCAN-View поддерживает новый стандарт CAN-Flex (CAN с гибкой скоростью передачи данных). Основной особенностью CAN-FD является более высокая пропускная способность передачи данных.
Поддержка CAN 2,0 A/B и CAN FD спецификации
Скорость передачи данных (номинальная) до 1 Мбит/с
Скорость передачи данных до 12 Мбит/с (только при использовании карты CAN FD)
Поддержка пользовательской скорости передачи данных;
Поддержка режима прослушивания;
Можно классифицировать списки приема и отправки
Поддержка шестигранного или десятичного формата для идентификатора CAN;
Байт данных в шестигранном, десятичном или ASCII формате;
Получение, отправка и отображение статуса ошибки;
Может контроллер аппаратного сброса;
Идентификатор может быть присвоен устройству.
Разработка собственного приложения с PCAN-Basic
С предоставленного компакт-диска вы можете найти файл интерфейса PCAN-Basic вторичного программирования. Этот API предоставляет основные функции, чтобы помочь пользователям написать свои собственные программы для доступа к CAN. API поддерживает следующие операционные системы:
8, 7, Vista, XP (32/64 бит)
Начиная с версии 4, PCAN Basic поддерживает новый стандарт CAN FD (CAN с переменной скоростью передачи данных), в основном с высокой пропускной способностью передачи данных.
API для вторичной разработки приложений CAN и CAN FD
Поддержка 10, 8,1, 7 (32/64 бит), Linux (32/64 бит), CE 6.x операционная система
Доступ к каналу CAN PCAN через Новый PCAN-LAN тип устройства
В то же время несколько приложений одновременно используют один физический канал CAN
DLL поддерживает все типы оборудования
Поддерживает 16 каналов одного аппаратного блока (в зависимости от используемой карты интерфейса CAN)
Поддерживает бесплатное переключение нескольких каналов CAN на карту CAN
Каждый может управлять внутренним буфером до 32768 кадров
Разрешение отметки времени приема кадров может достигать 1 мкс (в зависимости от используемой карты интерфейса CAN)
Поддержка некоторых специальных аппаратных функций, таких как режим прослушивания
Когда рамка банка получена, приложение уведомляется через событие.
Поддерживает версии 1,1 и 2,0 формата трассировки системы (поддерживает приложения CAN FD)
Расширенная система для операций отладки
Многоязычный вывод отладки
Операционная система определяет язык вывода
Информация о отладке может быть определена отдельно
API безопасности резьбы
Файл заголовка содержит обзор функций API. В PCAN-BasicAPI файл или файл справки (расширения файлов. Txt и. Chm), вы можете найти подробное описание API PCAN-Basic.
Описание принципа API
PCAN-BasicAPI-это интерфейс между приложением пользователя и драйвером устройства. В операционной системе это DLL (библиотека динамических звеньев).
Порядок доступа к интерфейсу CAN делится на три фазы:
3. Завершение (полное)
Перед использованием необходимо инициализировать канал. Это сделано простым вызовом на функцию CAN_Initialize (CAN) и функцию CAN_InitializeFD (CAN FD). В зависимости от типа аппаратного обеспечения может быть включен до 16 каналов одновременно. После инициализации, может ли канал быть готов и больше нет шагов для настройки.
Уменьшает время отклика на приеме
Функция CAN_Uninitialize, которая заканчивается общением, используется для освобождения ресурсов, предназначенных для канала CAN. Кроме того, канал CAN определяется как «свободный» и доступен для других приложений.
PCAN-Explorer5 программное обеспечение, все подключаемые модули и сопутствующее оборудование доступны.
Кроме того, функциональность PCAN-Explorer 5 также может быть расширена с плагинами, и плагины мы обеспечиваем лучший анализ и представление данных. Плагин плоттера может графически представить данные, плагин приборной панели поддерживает интерфейс инструмента передачи данных, разъем CANdb поддерживает импорт сторонних вечерние файлы CANdb, И разъем J1939 поддерживает протокол J1939.
Предоставляет PCAN-Symbol Editor - CAN symbol editor, импортирует файлы CANdb в формат данных символа и наоборот.
Читайте также: