
Realtek sdk что это
Обновлено: 05.07.2024
Мы продолжаем серию публикаций об электронных компонентах тайваньской компании Realtek, которые можно использовать для разработки мультимедийной и сетевой электроники.
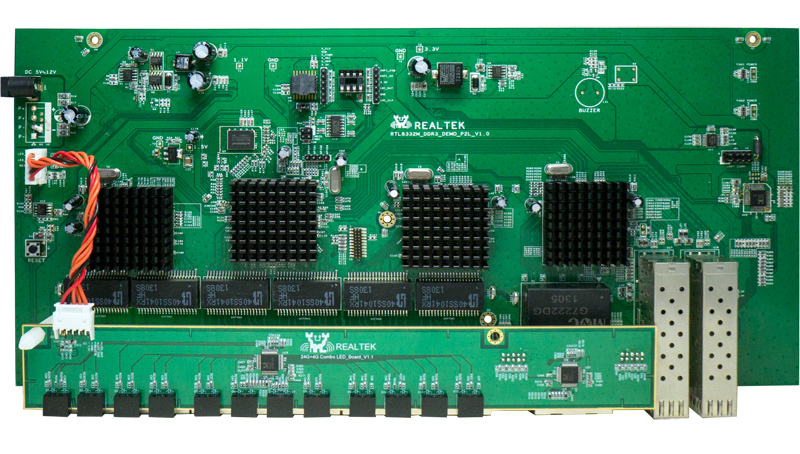
На днях в нашем распоряжении оказалась демо-плата многопортового коммутатора RTL_8332M_DDR3_DEMO_P2L_V1.0 на базе свитч-процессора Realtek 8332M, а также фирменный комплект средств разработки. Под катом мы расскажем, что собой представляет эта плата, опишем процесс сборки и загрузки прошивки на основе Realtek SDK, а также протестируем пропускную способность полученного коммутатора с проверкой работоспособности QoS.
Демо-плата предназначена для разработки и отладки ПО для управляемого многопортового коммутатора c 24 портами Fast Ethernet и 4 портами Gigabit Ethernet. Основа используемых свич-процессоров — CPU MIPS-4KEc 32bit@500MHz, они позволяет управлять всеми функциями коммутатора.
Возможно, у читателя возникнет вопрос: для чего в наше время, «когда космические корабли бороздят просторы вселенной» может понадобиться разработка коммутатора Fast Ethernet. На наш взгляд, данное недорогое решение может быть востребовано в системах, где не требуется высокая скорость передачи данных. Например, подключение IP-телефонии и камер видеонаблюдения.
- Порты: 24-port Fast Ethernet + 4-port Gigabit Ethernet
- Встроенный Fast Ethernet PHY на 8 портов
- Поддержка двух независимых XSMII-интерфейсов к внешним Fast Ethernet PHY
- Интерфейс QSGMII либо 2 пары интерфейсов RSGMII/SGMII/1000Base-X/100Base-FX
- Поддержка Serial/Dual I/O mode 32 МБ SPI Flash
- Интерфейс к внешней памяти до 128 МБ DDR1/DDR2 либо 256 МБ DDR3
- Ядро MIPS-4KEc с поддержкой адресации виртуальной памяти (MMU) на частоте 500 МГц
- Встроенная память SRAM объемом 128 Кбайт
- Два последовательных порта для отладки и контроля через интерфейс командной строки (CLI)
- Поддержка отладочного интерфейса EJTAG
- Поддержка интерфейсов EEPROM, I2C и SPI
- Поддержка EAV, 1588v2
- Поддержка диагностики Cable Diagnostics (RTCT)
- Поддержка режимов энергосбережения IEEE 802.3az Energy Efficient Ethernet (EEE)
Функционал L2 VLAN
Максимальное количество VLAN 4096
Поддержка до 64 независимых процессов для MSTP (IEEE 802.1s), RSTP и STP
Тегирование Q-in-Q и VLAN
Функционал L2 MAC
Длина сетевых пакетов до 10 КБ
Таблица на 8K L2 MAC-адресов
Таблица на 512 мультикаст-адресов
Поддержка IGMPv1/2/3 и MLDv1/2 snooping
Другая функциональность уровня L2
Контроль трафика broadcast, multicast, unknown- multicast и unknown-unicast
Поддержка зеркалирования траффика
Поддержка агрегации каналов (IEEE 802.3ad)
Поддержка распознавания и изоляции закольцованного траффика (RLPP/RLDP)
Функционал Access Control List (ACL)
Поддержка формата L2/L3/L4 (DMAC, SMAC и Ether-Type)
IPv6 ACL
Функции QoS
8 очередей на порт
Обработка очередей по алгоритмам Strict Priority (SP), Weighted Fair Queue (WFQ) и Weighted Round Robin (WRR)
Комплект поставки RTL_8332M_DDR3_DEMO_P2L_V1.0

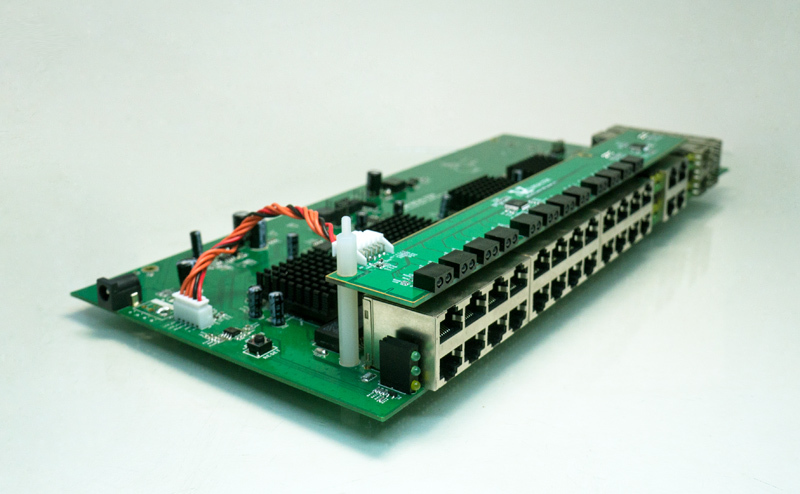
На фото ниже представлен вид платы сбоку, на нем хорошо видно порты:
Полученные нами средства разработки включают в себя toolchain, SDK с исходниками Linux и u-boot, а также некоторую документацию.
Сборка прошивки из Realtek SDK
Распаковываем toolchain и сразу прописываем пути к нему в PATH, чтобы bash знал, где его искать:
Распаковываем SDK, а также исходники u-boot и uClinux:
Выбираем версию linux и uClibc:
В SDK было 2 версии ядра Линукс – 2.6.19 и 2.6.32.58. С версией ядра 2.6.19 используется uClibc 0.9.28, а с версией 2.6.32.58 – uClibc 0.9.30. Мы использовали последнюю версию.

С версией ядра 2.6.19 используется uClibc 0.9.28, а с версией 2.6.32.58 – uClibc 0.9.30.
В настройках SDK включаем поддержку свитч-процессора 8332M:
В опциях Chip Support и SDK Driver указываем чип 8380:

В menuconfig-е ядра нужно изменить параметры загрузки на ”debug console =ttyS0,115200 mem=128M”, т.к. у нас используется чип с 128M памяти:

Сборка (сборка проходит успешно только с правами рута, поэтому нужно экспортировать вышеуказанные пути также и в PATH рута):
При сборке, не смотря на проведенную настройку в menuconfig-е, в консоль высыпается пара вопросов по настройке RTK BSP. Указываем чип 8380:
Если всё сработало, на экране выводится информация о собранном образе, результаты сборки кладутся в image/:
Загрузка собранного ядра
2) В расшаренную через tftp папку скинуть собранный образ ядра:
3) Подключиться к плате через UART, настройки для minicom следующие:
4) На плате грузится u-boot, нужно из него загрузить собранное ядро через tftp:
После загрузки Линукса запускаем DiagShell – command line interface для управления настройками свича.
В нем включаем нужные порты (или все):
Прошивка запущена, коммутатор работает.
Тестирование скорости
Замеры скорости мы проводили, подключив к плате 2 ПК c помощью программы iperf в двух режимах –LAN- и VLAN-подключение свича.
Через DiagShell VLAN был настроен следующим образом (например, настройка для портов 25, 26, 27 и vlan >
При тестировании VLAN проявляется интересный эффект: если VLAN настроить на диапазон портов, включающий порты 100М и 1000М, то скорость будет ограничена на уровне 100 Мбит/с, даже если оба ПК подключены в гигабитные порты.
Вот такие получились результаты тестирования:
| Порт | Режим тестирования | Замеренная скорость (Мбит/с) |
|---|---|---|
| 100M | LAN | 96,2 |
| 1000M | LAN | 936 |
| 100M | VLAN | 95,7 |
| 1000M | VLAN | 936 |
Можно сказать, что пропускная способность соответствует заявленной.
Теперь попробуем настроить QoS. Данная функция очень пригодится при настройке офисной IP-телефонии.
Как мы уже говорили, коммутатор поддерживает два алгоритма обработки очередей: Strict Priority и WFQ.
Мы ограничились проверкой Strict Priority. Для проверки подключили к плате три ПК. На одном из ПК запустили iperf-сервер:
На двух других ПК — клиенты:
При этом на одном из клиентов установили в IP-пакетах в поле DS значение 0x20 (DSCP 0x8), используя не очень задокументированную опцию -S:
Результаты замеров пропускной способности показали, что трафик распределился примерно поровну.
Теперь попробуем настроить QoS. Для этого зададим для DSCP 0x8 максимальное значение приоритета (7).
В результате маркированный трафик занял всю полосу пропускания. Что ж, похоже, QoS действительно работает.
Добавим несколько слов про DiagShell. На наш взгляд, этот CLI довольно функционален и вполне может использоваться при разработке готового устройства. Конечно, в идеале хотелось бы иметь некий интуитивный веб-интерфейс, который на данный момент отсутствует в SDK. Для конечного устройства его придется разрабатывать.
В целом можно сказать, что в результате мы получили тестовую плату многопортового коммутатора с возможностью разработки ПО. Такую программно-аппаратную платформу можно использовать для разработки недорогих управляемых коммутаторов Fast Ethernet для подключения к основной сети через порты Gigabit Ethernet.
Мы продолжаем серию публикаций об электронных компонентах тайваньской компании Realtek, которые можно использовать для разработки мультимедийной и сетевой электроники.
На днях в нашем распоряжении оказалась демо-плата многопортового коммутатора RTL_8332M_DDR3_DEMO_P2L_V1.0 на базе свитч-процессора Realtek 8332M, а также фирменный комплект средств разработки. Под катом мы расскажем, что собой представляет эта плата, опишем процесс сборки и загрузки прошивки на основе Realtek SDK, а также протестируем пропускную способность полученного коммутатора с проверкой работоспособности QoS.
Демо-плата предназначена для разработки и отладки ПО для управляемого многопортового коммутатора c 24 портами Fast Ethernet и 4 портами Gigabit Ethernet. Основа используемых свич-процессоров — CPU MIPS-4KEc 32bit@500MHz, они позволяет управлять всеми функциями коммутатора.
Возможно, у читателя возникнет вопрос: для чего в наше время, «когда космические корабли бороздят просторы вселенной» может понадобиться разработка коммутатора Fast Ethernet. На наш взгляд, данное недорогое решение может быть востребовано в системах, где не требуется высокая скорость передачи данных. Например, подключение IP-телефонии и камер видеонаблюдения.
- Порты: 24-port Fast Ethernet + 4-port Gigabit Ethernet
- Встроенный Fast Ethernet PHY на 8 портов
- Поддержка двух независимых XSMII-интерфейсов к внешним Fast Ethernet PHY
- Интерфейс QSGMII либо 2 пары интерфейсов RSGMII/SGMII/1000Base-X/100Base-FX
- Поддержка Serial/Dual I/O mode 32 МБ SPI Flash
- Интерфейс к внешней памяти до 128 МБ DDR1/DDR2 либо 256 МБ DDR3
- Ядро MIPS-4KEc с поддержкой адресации виртуальной памяти (MMU) на частоте 500 МГц
- Встроенная память SRAM объемом 128 Кбайт
- Два последовательных порта для отладки и контроля через интерфейс командной строки (CLI)
- Поддержка отладочного интерфейса EJTAG
- Поддержка интерфейсов EEPROM, I2C и SPI
- Поддержка EAV, 1588v2
- Поддержка диагностики Cable Diagnostics (RTCT)
- Поддержка режимов энергосбережения IEEE 802.3az Energy Efficient Ethernet (EEE)
Функционал L2 VLAN
Максимальное количество VLAN 4096
Поддержка до 64 независимых процессов для MSTP (IEEE 802.1s), RSTP и STP
Тегирование Q-in-Q и VLAN
Функционал L2 MAC
Длина сетевых пакетов до 10 КБ
Таблица на 8K L2 MAC-адресов
Таблица на 512 мультикаст-адресов
Поддержка IGMPv1/2/3 и MLDv1/2 snooping
Другая функциональность уровня L2
Контроль трафика broadcast, multicast, unknown- multicast и unknown-unicast
Поддержка зеркалирования траффика
Поддержка агрегации каналов (IEEE 802.3ad)
Поддержка распознавания и изоляции закольцованного траффика (RLPP/RLDP)
Функционал Access Control List (ACL)
Поддержка формата L2/L3/L4 (DMAC, SMAC и Ether-Type)
IPv6 ACL
Функции QoS
8 очередей на порт
Обработка очередей по алгоритмам Strict Priority (SP), Weighted Fair Queue (WFQ) и Weighted Round Robin (WRR)
Комплект поставки RTL_8332M_DDR3_DEMO_P2L_V1.0
На фото ниже представлен вид платы сбоку, на нем хорошо видно порты:
Полученные нами средства разработки включают в себя toolchain, SDK с исходниками Linux и u-boot, а также некоторую документацию.
Сборка прошивки из Realtek SDK
Распаковываем toolchain и сразу прописываем пути к нему в PATH, чтобы bash знал, где его искать:
Распаковываем SDK, а также исходники u-boot и uClinux:
Выбираем версию linux и uClibc:
В SDK было 2 версии ядра Линукс – 2.6.19 и 2.6.32.58. С версией ядра 2.6.19 используется uClibc 0.9.28, а с версией 2.6.32.58 – uClibc 0.9.30. Мы использовали последнюю версию.
С версией ядра 2.6.19 используется uClibc 0.9.28, а с версией 2.6.32.58 – uClibc 0.9.30.
В настройках SDK включаем поддержку свитч-процессора 8332M:
В опциях Chip Support и SDK Driver указываем чип 8380:
В menuconfig-е ядра нужно изменить параметры загрузки на ”debug console =ttyS0,115200 mem=128M”, т.к. у нас используется чип с 128M памяти:
Сборка (сборка проходит успешно только с правами рута, поэтому нужно экспортировать вышеуказанные пути также и в PATH рута):
При сборке, не смотря на проведенную настройку в menuconfig-е, в консоль высыпается пара вопросов по настройке RTK BSP. Указываем чип 8380:
Если всё сработало, на экране выводится информация о собранном образе, результаты сборки кладутся в image/:
Загрузка собранного ядра
2) В расшаренную через tftp папку скинуть собранный образ ядра:
3) Подключиться к плате через UART, настройки для minicom следующие:
4) На плате грузится u-boot, нужно из него загрузить собранное ядро через tftp:
После загрузки Линукса запускаем DiagShell – command line interface для управления настройками свича.
В нем включаем нужные порты (или все):
Прошивка запущена, коммутатор работает.
Тестирование скорости
Замеры скорости мы проводили, подключив к плате 2 ПК c помощью программы iperf в двух режимах –LAN- и VLAN-подключение свича.
Через DiagShell VLAN был настроен следующим образом (например, настройка для портов 25, 26, 27 и vlan >
При тестировании VLAN проявляется интересный эффект: если VLAN настроить на диапазон портов, включающий порты 100М и 1000М, то скорость будет ограничена на уровне 100 Мбит/с, даже если оба ПК подключены в гигабитные порты.
Вот такие получились результаты тестирования:
| Порт | Режим тестирования | Замеренная скорость (Мбит/с) |
|---|---|---|
| 100M | LAN | 96,2 |
| 1000M | LAN | 936 |
| 100M | VLAN | 95,7 |
| 1000M | VLAN | 936 |
Можно сказать, что пропускная способность соответствует заявленной.
Теперь попробуем настроить QoS. Данная функция очень пригодится при настройке офисной IP-телефонии.
Как мы уже говорили, коммутатор поддерживает два алгоритма обработки очередей: Strict Priority и WFQ.
Мы ограничились проверкой Strict Priority. Для проверки подключили к плате три ПК. На одном из ПК запустили iperf-сервер:
На двух других ПК — клиенты:
При этом на одном из клиентов установили в IP-пакетах в поле DS значение 0x20 (DSCP 0x8), используя не очень задокументированную опцию -S:
Результаты замеров пропускной способности показали, что трафик распределился примерно поровну.
Теперь попробуем настроить QoS. Для этого зададим для DSCP 0x8 максимальное значение приоритета (7).
В результате маркированный трафик занял всю полосу пропускания. Что ж, похоже, QoS действительно работает.
Добавим несколько слов про DiagShell. На наш взгляд, этот CLI довольно функционален и вполне может использоваться при разработке готового устройства. Конечно, в идеале хотелось бы иметь некий интуитивный веб-интерфейс, который на данный момент отсутствует в SDK. Для конечного устройства его придется разрабатывать.
В целом можно сказать, что в результате мы получили тестовую плату многопортового коммутатора с возможностью разработки ПО. Такую программно-аппаратную платформу можно использовать для разработки недорогих управляемых коммутаторов Fast Ethernet для подключения к основной сети через порты Gigabit Ethernet.
Многочисленным пользователям PС тайваньская компания Realtek известна по своим контроллерам сетевых (Ethernet) и беспроводных (WiFi) карт, а также по микросхемам AC97-аудиокодеков. Однако у Realtek есть процессоры не только для применения в PC, но также для сетевого оборудования.
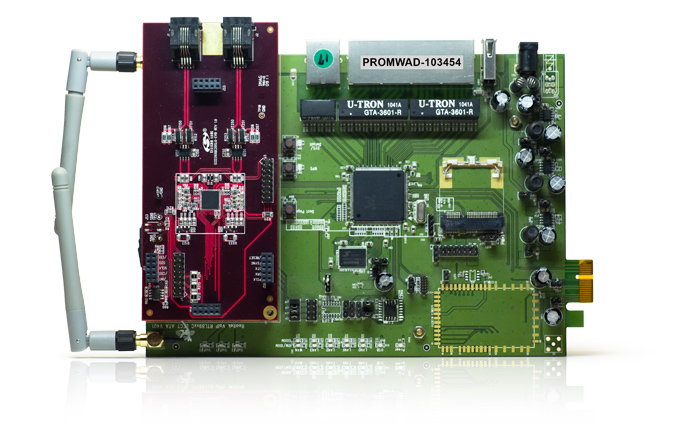
В рамках данной статьи мы познакомимся с отладочной платой и сетевым процессором Realtek RTL8954C, соберём и запустим базовое ядро Linux, а также выполним тест пропускной способности Ethernet-портов.
На заглавном рисунке представлена отладочная плата Realtek для процессора RTL8954C, мы использовали её в нескольких проектах по разработке абонентских роутеров LAN/WAN/WiFi c поддержкой VoIP-телефонии.
• SOC
— Встраиваемый центральный процессор, архитектура MIPS, частота до 620 МГц с встроенной технологией Radiax
• Функции L2
— 6 Gigabit Ethernet MAC свитч с пятью передатчиками IEEE 802.3 10/100/1000Mbps
— 1 выделенный порт GMII/RGMII/MII для соединения с внешней сетью
— Поддержка VLAN (таблица VLAN на 4096 значение)
• Функции L3
— 8 одновременных PPPoE-сессий
— Автоматическая настройка PPPoE
— Автоматическая проверка и генерация контрольных сумм IPv4
• Функции L4
— Поддержка NAPT для TCP/UDP-протоколов
— Автоматическая проверка и генерация контрольных сумм TCP/UDP
— Автоматическая работа L4 TCP/UDP, проверка генерация контрольных сумм
• Функции Firewall
— Создание фильтров Ethernet, PPPoE, TCP, UDP, ICMP, и IGMP-протоколов
• QoS (качество обслуживания)
— Каждый порт поддерживает 6-уровневую систему приоритета трафика. Приоритет трафика может быть обеспечен следующими технологиями: based on Port, 802.1p tag, DSCP, ACL-based priority и NAT-based priority
— Последовательные периферийные интерфейсы
— Поддержка одного PCI Express Host и одного PCI Express Slave
— Встроено 2 PCI Express PHYs
— 1 USB 2.0 host controller для доступа к USB-периферии
— Встроен 1 USB PHY
— 2 16550 UART
— До 44 GPIO-пинов
• Memory-интерфейс
— Serial Flash (тип SPI)
— SDR DRAM
— DDR1 DRAM
— DDR2 DRAM
— I2S-интерфейс
Комплект платы Realtek RTL8954C
Приступая к разработке, мы подписали NDA с Realtek и получили доступ к Realtek SDK для RTL8954C. C помощью этого SDK получилось без проблем собрать ядро linux-2.6.30 и базовую rootfs. Кит изображен на фотографии ниже:

- Разъем для DECT-модуля
- Панель LED-индикации Ethernet
- Панель LED-индикации VOIP (V400/401)
- Разъем PCI Express (IOH)
- Штыревая вилка для подключения JTAG
- Модуль WIFI
- Штыревая вилка (UART)
- Процессор RTL8954C
- Кнопка DECT
- Кнопка WPS
- Кнопка сброса настроек к по умолчанию
- Модуль LE88221 — SLIC с двумя FXS-портами
- Разъем FXS1
- Разъем FXS0
- Разъем подключения внешнего источника питания DC 12V (Power)
- Разъем подключения USB-накопителя
- Разъемы подключения 4-х LAN-портов
- Разъемы подключения WAN-порта
- OS Linux-2.6.30
- Toolchain rsdk-1.3.6-5281-EB-2.6.30-0.9.30
- SDK для реализации VOIP-функциональности
- Небольшой набор популярного OpenSource ПО, включая Samba
1. Выполнить установку на ПК системы Debian7.
2. Скопировать архив с SDK от Realtek в пользовательский каталог:
3. Выполнить разархивирование SDK:
4. Выполнить настройку конфигурационного файла для сборки прошивки:
Выполнить настройку собираемой прошивки, как описано ниже (см. скриншоты):


Выполнить сборку прошивки:
5. В папке image, если процесс прошел успешно, будут лежать файлы fw.bin, webpages.bin
6. Выполнить копирование файлов прошивки в директорию tftp server на ПК:
На ПК должны быть установлены следующие программы:
А) tftp-hpa — программа Linux TFTP-клиент, установка в Linux с помощью команды:
Б) tftpd-hpa — программа Linux TFTP-сервер, установка в Linux с помощью команды:
Прошивка платы Realtek RTL8954C
1. Выполнить подключение по UART к плате как показано на скриншоте ниже.
Программа для подключения — minicom (команда запуска: minicom –s)

2. На плате по умолчанию работает программа-загрузчик bootloder, а не u-boot. Для работы с сетью по умолчанию настроен адрес 192.168.1.6/24. Для обновления прошивки нужно настроить на ПК адрес из подсети 192.168.1.1/24 и подключить ПК и нашу плату в свитч.
3. Включить питание платы и нажать сразу «ESC» из терминала.
4. Выполнить запись прошивки на плату с ПК с помощью команд:
После записи прошивки плата перегрузится, далее нужно нажать кнопку «ESC» из терминала и прошить веб-интерфейс для платы
5. Выполнить перезапуск платы, отключив и включив питание.
Результат работы прошивки платы:
А) Доступ по minicom к загруженной системе для работы с файлами:

Б) Доступ к веб-интерфейсу платы:

Тестирование скорости передачи данных на плате Realtek RTL8954C на интерфейсе LAN и WAN
Теперь посмотрим, что умеет эта плата в плане сетевой производительности. Некоторые сетевые роутеры выполняют часть операций по пересылке данных LAN/LAN и LAN/WAN программно, поэтому возникают проблемы с производительностью. Ниже по тексту приводим один тест производительности сети с помощью портативного сетевого анализатора Ethernet-трафика и два теста скорости пересылки данных с ПК на ПК.
Тест производительности сети (LAN Bridge, NAT) на базе портативного сетевого анализатора Ethernet-трафика
Цель: протестировать пропускную способность RTL8954C пакетами различного размера, используя генератор трафика.
Тут будем пробовать 'модифицировать' SDK3.5 для ускорения старта и потребления для автономных устройств. Но это позже. Сейчас рассмотрим то, что позволяет последний на сегодня SDK 3.5.
Часть кода, для информации что примерно будем исследовать:
Дополнительно в код включена поддержка нескольких отладочных AT команд.
В итоге, в резерве, в RTL00 остается около 200 килобайт неиспользованной RAM (пик во время открытого socked).
По питанию это выглядит так:
(1 клетка = 1 секунда, 0.58 mA - аппаратная ошибка модуля)
Активный участник сообщества
Как видим, похоже, что в SDK3.5 WiFi для соединения сканирует все каналы (начальная пила по питанию), а потом уже подключается. Зачем сиё действо - неизвестно - канал, куда подключаться WiFi, указан в переданных ей настройках для соединения. Так-же очень наворочены задержки отключения в wifi_off().При смене тика RTOS эти задержки изменяются - это говорит о том, что их встроили просто так (безответственность писателей SDK!) Частично я уже изменил кванты некоторых опросов состояний WiFi с 1 секунды(!) на 20 ms в открытом коде SDK, но есть ещё закрытые. К примеру, инициализация или ожидание соединения WiFi опрашивается 20 секунд с интервалом 1 сек . SDK 3.5 рассчитано на 166MHz CLK CPU (а модуль от PADI стартует c reset на 83MHz ) но есть ошибки, описанные в Таймеры RTL8711. За счет этого при смене частоты CLK CPU тик RTOS меняется и всякие vTaskDelay() ведут себя не корректно, а приложение об этом не знает , меняется даже пауза beacon .
В таком виде текущее официальное SDK пока не может позиционироваться для использования в автономных устройствах. Требуются множественные "патчи". У кого какие предложения?
Активный участник сообщества
Ещё одна 'беда', если устройство просыпается через срок менее 120 секунд (TCP TIME_WAIT) и пытается открывать один и тот-же IP: PORT на внешнем сервере используя TCP, а закрывает соединение сервер или связь модуля была прервана путем отключения WiFi (например батарейка садится и модуль принял решение 'уснуть').Когда модуль стартует, то у него число random в текущем SDK всегда одинаково - начинается с фиксированной последовательности. По этому номеру LwIP открывает порт для связи - см. tcp_new_port() и
Активный участник сообщества
Её вызов происходит в закрытой части либы при старте InfraStart(), до исполнения main():nikolz
Well-known member
правильно ли я вас понял, что минимальное время затрачиваемое RTL на выхода из deep-sleep+связь с сервером +вход в deep-sleep составляет в исходниках 5 секунд, в вашем варианте 1.4 секунды?Если так, то почему Вы утверждаете что это меньше, чем 0.34 секунды в ESP?
Активный участник сообщества
правильно ли я вас понял, что минимальное время затрачиваемое RTL на выхода из deep-sleep+связь с сервером +вход в deep-sleep составляет в исходниках 5 секунд, в вашем варианте 1.4 секунды?Если так, то почему Вы утверждаете что это меньше, чем 0.34 секунды в ESP?
Как всегда вы всё искажаете Ещё не надоела работать на рекламу Espressif? Меняйте работу.
У ESP в стандартном SDK время активности между deep_sleep при просыпании с подключением к AP, получением IP в DHCP, передачей и приемом с внешнего WEB сервера данных составляет более 2-х секунд, обычно за 3.
У RTL, при изменении всего одной переменной - 1.2 сек. Думаю, что починят SDK, т.к. имеющаяся - бета. На прошлой версии установка связи с внешней AP была значительно быстрее, но драйвер WiFi изменили - сменили структуру обращений к таймерам на семафоры с таймерами.
Время от старта до включения WiFi в стандартном варианте SDK3.5b у RTL составляет 300 ms.
У ESP - в зависимости от режима - при использовании ранее сохраненных настроек оно меньше, при калибровке - значительно больше. У RTL в SDK не вписано сохранение настроек - оставлено на усмотрение пользователя. Вы же сравниваете именно этот параметр А минимальные временные характеристики для ESP были получены и реализованы мной, в большей части в моем meSDK - вы их и приводите, не уточняя что и как. Время получения IP от роутера модулем ESP у меня составляет от 0.7 секунд до 1.5. Роутер - ASUS RT-N56U. Ошибка у ESP с засыпанием-просыпанием после deep_sleep в последних SDK ESP с учетом ранее сохраненных параметров так и не исправлена. Просыпание в его SDK идет по ветке старта после критической ошибки с полной калибровкой WiFi, т.к. ошибка в последней процедуре выхода в deep_sleep - процессор выскакивает в область отключенной flash и в зависимости что там он найдет летит на вектор "протектед" с записью этого состояния причины перезагрузки в RTC и другие регистры. т.е. как повезет - как будет читаться открытая шина Исправлено патчем либы только в meSDK.
Пока разбирал общий случай (аналог первого холодного включения модуля после прошивки) c не фиксированным IP в роутере и без прочих предустановках. Далее, после починки глупости с таймерами в SDK, предполагаю слепить специализированный вариант. Но чуть позже..
Различия SDK RTL и ESP глобальны – в SDK RTL любой может изменить практически всё что ему требуется, т.к. есть все исходники, кроме драйвера WiFi. Драйвер WiFi общается с остальной открытой системой через глобальную структуру, в которой вы можете изменить любые процедуры. В ESP эта часть и уровнем выше (сохранение и запись установок WiFi и т.д.) является закрытой частью в SDK, как и все процедуры включений и выключений разных режимов sleep.
По этому у RTL использую понятие – стандартный SDK – это если взять исходный SDK и ничего не менять, но он на такое не рассчитан, т.к. позволяет изменять любые используемые ресурсы под вашу задачу. Разницу прочувствовали?
PS: кароче это надоело - постоянно уточнять безграмотному рекламщику Espressif nikolz разницу подходов в SDK RTL и ESP. Уже неоднократно сказано - по 99% параметрам RTL-ы лучше ESP, а отличия давно разобраны.
Если вас действительно интересует уровень драйвера WiFi в RTL, то в SDK дан список команд в component/common/drivers/wlan/realtek/src/osdep/wireless.h
rtl00TstMinAmebaV35a/wireless.h at master · pvvx/rtl00TstMinAmebaV35a · GitHub
Но что-то мне подсказывает, что вы не полезете на такой уровень Это уже уровень для написания сканеров WiFi и он открыт в данном SDK.
nikolz
Well-known member
Как всегда вы всё искажаете Ещё не надоела работать на рекламу Espressif? Меняйте работу.
У ESP в стандартном SDK время активности между deep_sleep при просыпании с подключением к AP, получением IP в DHCP, передачей и приемом с внешнего WEB сервера данных составляет более 2-х секунд, обычно за 3.
У RTL, при изменении всего одной переменной - 1.2 сек. Думаю, что починят SDK, т.к. имеющаяся - бета. На прошлой версии установка связи с внешней AP была значительно быстрее, но драйвер WiFi изменили - сменили структуру обращений к таймерам на семафоры с таймерами.
Время от старта до включения WiFi в стандартном варианте SDK3.5b у RTL составляет 300 ms.
У ESP - в зависимости от режима - при использовании ранее сохраненных настроек оно меньше, при калибровке - значительно больше. У RTL в SDK не вписано сохранение настроек - оставлено на усмотрение пользователя. Вы же сравниваете именно этот параметр А минимальные временные характеристики для ESP были получены и реализованы мной, в большей части в моем meSDK - вы их и приводите, не уточняя что и как. Время получения IP от роутера модулем ESP у меня составляет от 0.7 секунд до 1.5. Роутер - ASUS RT-N56U. Ошибка у ESP с засыпанием-просыпанием после deep_sleep в последних SDK ESP с учетом ранее сохраненных параметров так и не исправлена. Просыпание в его SDK идет по ветке старта после критической ошибки с полной калибровкой WiFi, т.к. ошибка в последней процедуре выхода в deep_sleep - процессор выскакивает в область отключенной flash и в зависимости что там он найдет летит на вектор "протектед" с записью этого состояния причины перезагрузки в RTC и другие регистры. т.е. как повезет - как будет читаться открытая шина Исправлено патчем либы только в meSDK.
Пока разбирал общий случай (аналог первого холодного включения модуля после прошивки) c не фиксированным IP в роутере и без прочих предустановках. Далее, после починки глупости с таймерами в SDK, предполагаю слепить специализированный вариант. Но чуть позже..
Различия SDK RTL и ESP глобальны – в SDK RTL любой может изменить практически всё что ему требуется, т.к. есть все исходники, кроме драйвера WiFi. Драйвер WiFi общается с остальной открытой системой через глобальную структуру, в которой вы можете изменить любые процедуры. В ESP эта часть и уровнем выше (сохранение и запись установок WiFi и т.д.) является закрытой частью в SDK, как и все процедуры включений и выключений разных режимов sleep.
По этому у RTL использую понятие – стандартный SDK – это если взять исходный SDK и ничего не менять, но он на такое не рассчитан, т.к. позволяет изменять любые используемые ресурсы под вашу задачу. Разницу прочувствовали?
PS: кароче это надоело - постоянно уточнять безграмотному рекламщику Espressif nikolz разницу подходов в SDK RTL и ESP. Уже неоднократно сказано - по 99% параметрам RTL-ы лучше ESP, а отличия давно разобраны.
Если вас действительно интересует уровень драйвера WiFi в RTL, то в SDK дан список команд в component/common/drivers/wlan/realtek/src/osdep/wireless.h
rtl00TstMinAmebaV35a/wireless.h at master · pvvx/rtl00TstMinAmebaV35a · GitHub
Но что-то мне подсказывает, что вы не полезете на такой уровень Это уже уровень для написания сканеров WiFi и он открыт в данном SDK.
Читайте также:
- В каком поколении компьютеров использовался язык программирования си
- Что делать если террария выдает ошибку net framework
- Как запустить код в sublime text 3 c
- После выключения компьютера горит индикатор
- Скачивал игру в стиме выключил компьютер и игра начала скачиваться заново а место не освободилось