
Tbs crossfire подключение к pixhawk
Обновлено: 05.07.2024
Длительность: 15 мин и 53 сек
Битрейт: 192 Kbps
Cлушайте онлайн и cкачивайте песню Tbs Crossfire Подключаю К Pixhawk Теперь Не Нужны Модемы размером 20.90 MB и длительностью 15 мин и 53 сек в формате mp3.Похожие песни
Tbs Crossfire Micro Tx V2 Die Ersten Schritte
Дальнобойный Маяк В Каждом Приёмнике Тест Поискового Режима Crsf Tbs Find Mode Beacon
How To Feed Mavlink Data To Your Mini Crossbow Aat
How To Flash Radiomaster Tx16S Internal Multiprotocol Module Firmware Beginners
Radio Multi Protocol Range Test Jumper T Lite Vs Radiomaster Tx16S Tx12 Vs Tbs Mpm
Crossfire And Pixhawk Rc Control S Bus Mavlink And Telemetry Options
Crossfire Micro Tx 500 Mw Mod Applied
О Дешевых Китайских Двигателях Vlog 19
Narrated Long Range Fpv Flight With Tbs Crossfire Ardupilot
APlaneRC - Brock Cutarelli
Tbs Tracer Crossfire Complete Setup Guide Watch This First
Tbs Tracer Часть 1
Anleitung Crossfire Firmware Upgrade Tbs Agent X Long Range 250Mw Open Deutsch
Connecting Jumper R8 To Pixhawk Telemetry Port
Jumper T18 Pro Overview Quick Range Test
Tbs Crossfire Micro V2 1W Update Bind Process
Pixhawk Mission Planner Arducopter Build For Beginners Installation
Tbs Crossfire Vertical Antenna Latency Switch Test
Мультибинд И Tbs Облако Две Аппы На Один Приёмник Tbs Cloud Multibind
Овца Опять Всех Удивила Tbs Crossfire Sixty9 Обзор На Канале Mustfly
Слушают
I Wanna Live Wanna Live Deep Inside I Ve Always Been Reaching Out For A Hand Slowed
Offset Clout Offset Verse Only
Brooklyn Bloodpop Минус
Жизнь У Сластены Слаще Карамели
Senpai 3 Sing Fnf
Dj Kayz Feat Niska Monte Le Son Clip Officiel
Eldar Ahmedow Gozelim
Big Belly Man Hot Porn
Пара Из Будушего Титры
Füzuli Hüseynov Həkim
Prince Of Egypt Plagues
Братик Братик Не Надо
Закатун В Лагере Были
Soda Dungeon Ost Piano
Jedina Si Vredela
Скачивают
Декоратор Кулинарный Lekue Испания
06Tawa Ta Sameni
Ламповый Малыш Из Киева
Digniin Neo Hair Lotion
Max Plays Kingdom Under Fire The Crusaders Lucretia Mission 6 Verteidigungswall Esse
Sonny Fodera Biscits The Get Down Solotoko
Lektrique Seek N Destroy Atomic Lektrique Vip Electro House Squirrel 4 5
Где Дракон Where Is The Dragon Мультфильм Hd
Zavodila Friday Night Funkin Unnerving Voices One Finger Piano Tutorial
Rare By Selena Gomaz Royale High Music Video Royale Aesthetic
Что Он Осознал В Отношении Меня Ответ У Таро
Tbs Crossfire Подключаю К Pixhawk Теперь Не Нужны Модемы
Открытие Дороги В С Гасик 2 Часть
Miley Cyrus Hot Tribute Video Compilation
Счастливая Покупка 2019 Международная Социальная Программа Реальные Отзывы
Закончили С Магазином Часть 6 Что Будет Дальше
The Best Cod Challengers Players Breaking Point S Top 20 Modern Warfare Challengers

Функции LQ и RSSI могут запутать и ввести в заблуждение пилотов, у которых есть TBS Crossfire.
В этой статье я рассмотрю и попытаюсь объяснить различия между LQ и RSSI в TBS Crossfire, а также как это все настроить в Betaflight и OpenTX на пульте Taranis для контроля и качества сигнала.
RSSI и LQ очень полезны для мониторинга качества и уровня сигнала во время полетов.
Чем отличается LQ от RSSI
Помимо индикатора RSSI, усилители Crossfire могут выводить и данные LQ. LQ выводит данные о качестве сигнала, а точнее, о шуме. Эти данные основываются на проценте полученного сигнала, т.е. часть сигнала теряется (это и есть шум), а большая часть доходит, именно это и отображает (сколько дошло) LQ.
В Crossfire можно вывести и комбинированные данные, RSSI/LQ. В таком режиме будет отображаться самое низкое (худшее) значение между ними двумя. Это удобно использовать, когда OSD использует только один канал связи.
Что такое LQ
Значение уже расшифровывалось выше, но здесь поговорим о другом. Crossfire LQ отображает значение в диапазоне от 0% до 300, а не до 100% как все привыкли. Это связано с тем, что Crossfire увеличивает каналы передачи данных.
Почему нужно использовать LQ для контроля качества сигнала
Рекомендация: используйте LQ вместо RSSI и SNR (комбинированный показатель LQ\RSSI) в качестве основного показателя уровня и качества сигнала.
Во время тестирования, я понял, что в некоторых ситуациях у меня плохой сигнал RSSI, но LQ показывает отличный уровень. Поэтому, сейчас для меня LQ более надежный показатель, чем RSSI. Можно использовать и комбинированный показатель этих двух функций.
Как включить и настроить LQ в Taranis OpenTX
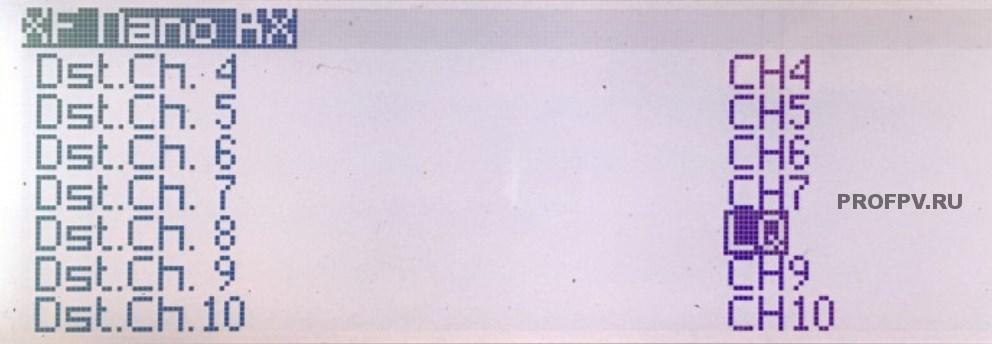
Назначение каналов для вывода LQ
Как включить LQ в OSD
Функцию можно включить для отображения в Betaflight OSD.
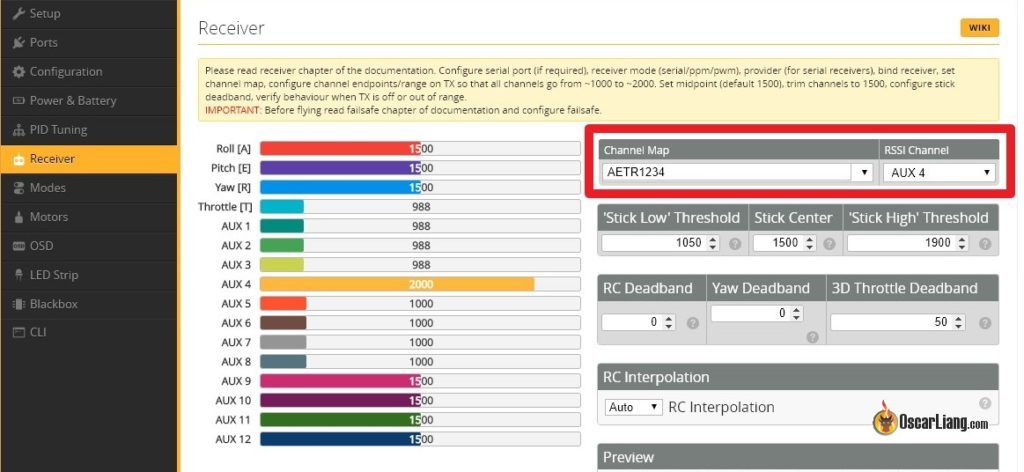
Также, во вкладке OSD нужно включить RSSI для отображения на экране.
Настройка сигнализации при низком LQ в Taranis
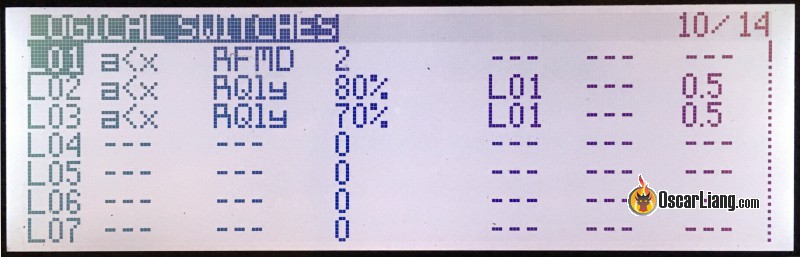
LQ в Crossfire может выводить более широкий диапазон, чем OpenTX и отображает значения в диапазоне (0-300%), как говорилось выше. Поэтому он разделен на 2 отдельных значения в OpenTX (датчики на вкладке телеметрии): RLQY и RFMD.
RLQY означает качество полученного сигнала. Это количество переданного сигнала, полученного приемником в процентах (от 0% до 100%).
RFMD означает Режим Рабочей Частоты, и есть 3 режима радиочастоты:
- RFMD = 2, режим 150 Гц,
- Режим RFMD = 1, 50 Гц
- Если RFMD = 0, режим 4 Гц (без телеметрии)
LQ может отключиться на секунду при переходе на другой режим.
Функции, которые подают звуковые сигналы:
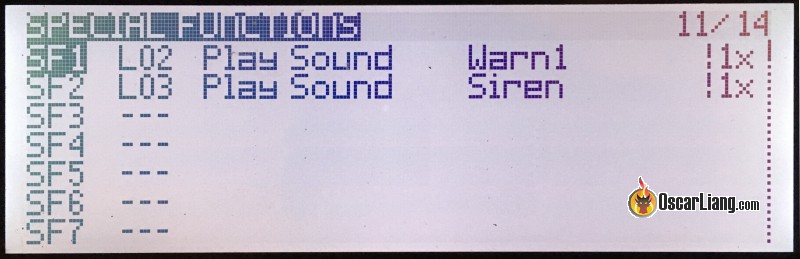
!1x в конце функции означает, что он не будет воспроизводиться, когда вы включаете аппаратуру, и он срабатывает только один раз.
Идеальный LQ и худший LQ
Когда вы находитесь в режиме RFMD 2 (150 Гц), максимальный LQ будет составлять 300%. Но в действительности, процент LQ в этом режиме не имеет значения, и вы можете его игнорировать. Поскольку система переключится на RFMD 1 (50 Гц), если это нужно для текущего качества связи.
Вы должны начать обращать внимание на LQ в RFMD 1. Если качество сигнала продолжает ухудшаться, оно изменится на очень медленный RFMD 0, который даст только 4 Гц скорости обновления.
Хорошая связь для дальнолетов (RFMD 1) должна оставаться выше 90%. LQ 70% ниже считается плохим показателем, если вы видите это, вы должны вернуться назад как можно скорее! Если у вас постоянно низкое значение, проверьте антенны, возможно на них есть повреждения.
Некоторое время назад появился новый контроллер, под который появились прошивки Arducopter Arduplane и хотя сам контроллер не имеет к ардуино никакого отношения, фактически не форматен для моего сайта -тем не менее я решил его попробовать и опубликовать результаты этого знакомства.
Итак контроллер именуемый как Pixhawk это решение объединяющее полетный контроллер известный ранее как PX4 и плату ввода-вывода PX IO в одном. Принципиальное отличие от популярного ныне АрдупилотМега(APM) - новый контроллер имеет высокопроизводительный 32-битный процессор, имеющий значительный запас памяти. Это делает его более перспективным для развития следующих поколений прошивок. В настоящее время существенным отличием является то, что программное обеспечение Pixhawk, в отличии от АПМ позволяет испытать работу фильтра кальмана для более точной обработки показаний сенсоров. Для конечного пользователя это может означать что такой контроллер (после того как работы над фильтром кальмана будут завершены) сможет работать более устойчиво в условиях вибраций.

"Первое пощупать"
Итак контроллер попавший мне в руки был уже прошит используя программное обеспечение "CGS Station" это так называемый "нативный софт", честно говоря не возьмусь утверждать летает на этом софте кто или нет, но мне как фанату ардукоптера он вообще неинтересен. Поэтому первая задача - залить туда прошивку Arducopter.
первое что я ожидал (после установки драйверов) соединиться по юсб с мишен планером, указал новый COM порт и скорость 115200 но многочисленные попытки ни к чему не привели .
Затем я попробовал войти в терминал, выбрал тип PX4 скорость 115200. И то что я там увидел - меня шокировало. консоль линуксоподобной ОС. в которой есть файловая система, а ардукоптер для него - пап ка с программой.
Что важно знать если на этом контроллере раньше стоял сторонний софт:
- флешку надо отформатировать, желательно до заливки прошивки ардукоптера, форматируется она через картридер файловой системой fat32 со стандартным размером кластера
- прошивку "ардукоптер" надо загружать в полетный контроллер используя программу "мишен планер", программа "CGS Station" загружает альтернативное программное обеспечение, не имеющее отношение к ардукоптеру -его загружать ненужно.
- После первой прошивки ардукоптера нужно держать нажатой кнопку которая подключена в разъем "switch" - при этом перегружается прошивка в pxio из основной части прошивки (процессор отвечающий за ввод-вывод)
если этого не сделать то на флешке в APM\BOOT.LOG ошибку No PX4IO board found. (файл можно посмотреть подключив флешку через картридер к компьютеру)
- ряд проблем решается запуском в терминале следующих команд. это так называемая "чистка"
- Если флешка вставлена но в терминале вы видите приглашение операционной системы вместо версии ардукоптера и привычного меню - это означает что программа "ардукоптер" не запустилась, причину ее капризов следует искать в логах на флешке в APM\BOOT.LOG
- некоторые опции конфигурации (например включение PPM входа ) осуществляются путем создания пустого текстового файла с определенным именем (следует строго соблюдать регистр букв)
- особенностью подключения пиксавк по USB в отличие от апм - перед тем как подключаться терминалом, после включения кабеля следует подождать до 30 сек (он прилично по времени грузится и не отдает мишен планеру параметры пока идет загрузка)
- после того как ардукоптер нормально загрузился в терминале возможно сделать настроек так как мы привыкли это делать на АПМ setup - reset - Y
- Основное отличие Пиксавка от АПМ наличие расширенного фильтра кальмана, в момент написания этой статьи актуальна девелоперская версия AC 3.2RC7 , в ее параметрах это главное отличие выключено, для полноценного использования контроллера его следует включить. параметр находится в полном списке параметров AHRS_EKF_USE, для включения следует установить значение 1.
- Чтобы предотвратить запуск программы ардукоптер и попасть в терминале в консоль операционной системы следует включить контроллер при извлеченной флешке
Описание разъемов

1 Spektrum DSM receiver - гнездо для подключения приемник радио управления стандарта "Спектрум"
2 Telemetry - подключение радиомодемов для связи с компьютером
3 Telemetry - подключение OSD (система наложения полетных показателей на видеокартинку при полетах по камере)
4 USB - подключение к компьютеру (есть еще боковое гнездо со стандартным микро-юсб разъемом)
5 SPI (serial peripheral interface) bus - цифровая шина общего назначения
6 Power module - разъем подключения оригинального модуля питания с сенсорами напряжения и тока
7 Safety switch button - кнопка "безопасности"
8 Buzzer - зуммер
9 Serial - последовательный порт общего назначения
10 GPS module - подключение навигационного приемника
11 CAN (controller area network) bus - цифровая шина для подключения устройств стандарта CAN
12 I2C splitter or compass module - разъем подключения внешнего компаса
13 Analog to digital converter 6.6 V -порт аналогово-цифрового преобразователя
14 Analog to digital converter 3.3 V -порт аналогово-цифрового преобразователя
15 LED indicator - многоцветный индикатор
- Привычные по АПМ 5-контактные разъемы телеметрии и жпс тут стали 6-ти контактными, поэтому кабели от комплектов АПМ не подойдут.
- распиновка разъемов тут, следует отметить что порты телеметрии хотя и значатся как 3,3 терпимы к входному сигналу 5 вольт

2 Futaba S.Bus receiver input - подключение приемника приемника радиоуправления Futaba
3 Main outputs - PWM основные выходы (подключение регуляторов оборотов мультикоптера)
4 Auxiliary outputs - PWM дополнительные выходы (например управление сервоприводами подвеса камеры)
Вывод:
с потребительской точки зрения у Pixhawk, в отличии от АПМ, отсутствуют раздельные каналы PWM для подключения управления от приемников не имеющих выхода в стандартах PPM, futaba, Spektrum
Тем кто не желает расставаться с привычной аппаратурой без поддержки этих стандартов придется приобрести плату преобразователя "PPM Encoder"
Результаты тестов
Полетный тест №1 прошивка ардукоптер 3.2rc7
13 сентября 2014 примерно в 13 часов поставил китайский пиксавк на тестовый легкий квадрокоптер
попробовал в стабе повисеть потом в альтхолде
в режиме стабилизации вел себя адекватно, а в альтхолде мне показалось что держать высоту труднее чем в стабе.
решил что могут быть виноваты вибрации, настроил запись лога иму и пошел еще раз летнуть.
чуть повисел в альтхолде потом его постепенно стало кренить в мою сторону. я жму от себя а он на меня и уже идет на запредельный угол.
я как то даже неожиданно для себя спокойно отшагул в сторону пропустив его упасть на то место где я стоял.
высота была всего метр и из потерь - только проп один сломался
ну думаю ладно, главное сделано, гляну логи.
в логе номер 13 оказалось что вибраций нет - идеальная нитка
но там глитч у жпса значится (жпс модуль гаденький юблокс, причем гаже своих собратьев, просто неуда чный ), а я не отключил AHRS GPS GAIN в полном списке параметров. У меня давно сомнения на его счет что глитч детектор не успевает отключить коррекцию центрифугальных ускорений и в результате уровень в контроллере заваливается.
ну, думаю, ладно, отключу и попробую еще раз.
после ремонта - пробую включить не армится и конектится к компу через раз, то пишет AHRS BAD, то проверьте компас
попробовал перекалибровать компас а там офсеты 500-700.а это указывает на неисправность контроллера или глюк прошивки. Поскольку с прошивкой быстрее и проще - все сбросил перепрошил -но результат остался тот же..
вскрыл коробочку а там оказалось что у гироскопа и компаса половина ног не запаяна.. на ногах проца капли от активного флюса которые начали его разъедать
появилась гипотеза почему высоту не держал - кусочек поролона положенный в корпус не то что не сжимается до половины объема как это надо - просто болтается корпусу.


Система TBS CROSSFIRE – это система радиолинка, предназначенная для FPV-энтузиастов. Он обладает нереальной дальностью действия и при этом сохраняет основные функциональные возможности, такие как невосприимчивость к помехам от бортового оборудования, управление с низкой задержкой или двусторонняя связь, включая телеметрию.
Это дальнобойная связь, основанная на новейшей радиочастотной технологии, способная к самовосстановлению двусторонней связи и дальности. С чувствительностью 130 Дб, миниатюрными приемниками для квадрокоптеров FPV, TBS CROSSFIRE обладает самыми современными технологиями, обеспечивающими превосходное управление на большом расстоянии.
Лаконичность
Crossfire Micro TX заимствует основную технологию у своего старшего брата, но представляет собой JR-модуль, упрощенный до самых востребованных функций.
Для людей, которые хотят совершать сверхдальние полеты за пределами 15-20 км, Crossfire Micro TX – лучший выбор. Для тех, кто хочет проникать в здания, летать на мини-квадрокоптерах или просто исследовать окрестности на расстоянии нескольких километров, Micro TX будет идеальным компаньоном. Все лучшие пилоты летают на TBS Crossfire.

Телеметрия / CRSF
TBS Crossfire Micro TX имеет встроенную телеметрию. Благодаря двусторонняя связи есть возможность обновления прошивки, настройки канала видеопередатчика или настройки параметров управления полетом, таких как PIDs.
Адаптивная полоса пропускания контролирует скорость передачи или оптимизирует ее для максимального диапазона. CRSF – это собственный протокол связи TBS между Crossfire и пультом / полетным контроллером (FC). Он обеспечивает сверхнизкую задержку и невероятную пропускную способность (в 3 раза быстрее, в 6 раз больше данных, чем у любого сопоставимого протокола). Благодаря такой тесной интеграции TBS Crossfire является логичным выбором для тех, кто летает на платформах Betaflight, KiSS или ArduPilot/Pixhawk.
Читайте также: