
Выбор компьютера для linuxcnc
Обновлено: 02.07.2024
формирование скелета мануальника закончено,хотя сам он ещё в процессе написания.
Можно критиковать,предлагать и спрашивать о том что не ясно.
-
(в резерве) (в резерве) (готово) (редактируется) (редактируется) (редактируется) (редактируется) (редактируется) (редактируется) (редактируется)
Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
Общие сведения о станке
Компьютер с которого осуществляется управление станком
)Двуядерный процессор AMD частотой 3 Ггц.
)Память DDR2 800 Мгц,4 ГБ.
Так много потомучто более мелких модулей у меня нету.а покупать специально жаба душит.
а так для работы должно хватить 500 Мб + файл подкачки на диске.
Плата согласовния компьютера и станка PLC4x-G2 производства Пурелогик имеет:
)Один ШИМ (или всётаки ДИМ?) декодер с оптической отвязкой от платы
)Два реле включаемых пинами порта LPT
)Одно реле включаемое с пина LPT или детектором сигнала (Charge Pump,PWM шпинделя) по выбору.
К сожалению,что в первой,что во второй проданной мне плате клеммы
для подключения силовой нагрузки не образуют электрического контакта с платой.
Поэтому управляемую нагрузку мне пришлось припаивать к плате непосредственно.
)Плата активируется как постоянным сигналом ENABLED,так и модулированным частотой,называемый ChargePump.
Выбор между сигналами осуществляется с помощью микропереключателя.
БУ станка состоит из блоков питания,аналоговых драйверов Leadshine и инвертора HOLIP-A,
который управляется одним реле и аналоговым сигналом от ШИМ декодера.
Размер по Х 700 мм,по У 800 мм,по Z 100 мм.
Датчик home-limit осей Х и У находится в начале координат,т.е. с права для оси У,и спереди для оси Х.
или Х=У=(-1)
У оси Z датчик находится в верхнем положении,в соответсвии с промышленным стандартом его координата равна +1,
а сама ось направлена вниз и принимает отрицательные значения.
Минимальные и достаточные требования к компьютеру
)Наличие в составе компьютера внешнего или внутреннего (т.е. на материнской плате) контролёра LPT.
Настройку LinuxCNC для работы с аппаратными контролёрами этот мастер не поддерживает и для этого
надо использовать мастер Pncconf.
)x86 совместимый процессор уровня Pentium II/III с частотой 400 МГц и выше.
Для минимального запуска оболочки пользователя установленной на диск Ubuntu надо
128
256 Мб памяти ОЗУ и файл или раздел подкачки (далее swap) размером
400 МБ.
для комфортной работы в системе от 512 МБ.
После 1 Гб swap можно отключить совсем.
Начало работы мастера

В первом окошке никаких настроек не делается,просто даются объяснения чегото там на англиском.
Хлопаем по кнопке Forward (т.е. Вперёд) и переходим к следующему окну,
в котором предлагают решить будем мы создавать конфиг заново,
или воспользуемся информацией о старом.

Если же вы используете устаревщии монитор и кнопка Forward оказалась за пределами экрана,
то нажав и удерживая клавишу Alt возмите левой кнопкой мыши окошко и переместите его так,
чтобы эта кнопка стала вам видна.

В верхней части окна находится переключатель выбора между созданием (Create) и редактированием (Modifi) уже созданного конфига.
Вот собствено можно увидеть эту часть окошка с переключателем в положении выбора редактирования уже сделанных конфигов.

Если вы вы выбираете создание конфига,то ни каких дополнительных вопросов не задаётся и вы
переходите к следующему окну мастера.
Если же вы выбираете изменение конфигурации,то выводится диалоговое окно выбора файла *.stepconf с сохранёнными настройками с которыми был сделан предыдущий конфиг.

Сам по себе этот файл является документом в формате xml,
используется только мастером Stepconf и никак в работе LinuxCNC собственно не участвует.
Хранить и открывать мастером его можно в любом месте,в любом случае мастер будет
создавать папку с конфигурационными файлами и новый файл *.stepconf
заново в стандартной папке для хранения конфигов.
(
стандартное обозначение пути к домашней директории пользователя )
Я по мнению сообщества безграмотен,могу дать вредные или ошибочные советы.Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
Параметры станка, контроллера и быстродействия

Machine Name название создаваемого конфига.
Для него можно использовать заглавные и строчные буквы,цифры и знаки "-" и "_".
LinuxCNC не поддерживает для разных задач разные профили,вместо этого для каждого конфига создаётся с этим именем отдельная папка,
в которой конфиг и хранится вместе с сопутсвующими ему файлами.
Выбор конкретного конфига осуществляется запуском LinuxCNC через соответсвующии ярлык
или если вы забыли в " Начало работы мастера " его создать,
непосредственным вызовом из консоли,способом указывания в параметрах вызова пути к главному *.ini файлу.
Например для пользователя с именем "cnc" и названием конфига "Purelogic_PLC4x-G2"
вызов LinuxCNC c соответствующим профилем будет выглядеть так:
Configuration directory не редактируемый параметр,который показывает путь к папке с создаваемыми конфигами.
- XYZ - Трёх осевой фрезер
- XYZA - Трёх осевой фрезер с токарной осью
- XZ - Токарный станок
- Inches (G20)
- Millimeters(G21)
- Step time Длительность сигнала step
- Step space Минимальный промежуток времени между двумя сигналами step
- Direction hold Время после изменения сигнала Dir после которого можно начинать посылать импульсы Step.
- Direction setup Время после последнего импульса Step после которого можно менять сигнал Dir
Base Period Maximum Jitter Максимальный разброс базового периода реалтайма.
Для настройки этого параметра существует отработанная методика с использованием утилиты latency-test,
но на мой взгляд она приводит к неоправданно большим или маленьким значениям этой величины.
Её можно использовать только для предварительной оценки этого параметра.
Для этого запускаем её в мастере кнопкой "Test Base Period Jitter",запускаем редактор Gedit,
открываем им довольно крупный фаил,после чего записываем в параметр значение "Max Jitter" из строки "Base thread".

Чтобы не мучится с запуском и проходом мастера для смены одной переменной можно
редактировать эту переменную прямо в файле конфигурации.
Файл находится в папке указанной в параметре Configuration directory из " Параметры станка, контроллера и быстродействия"
имеет расширение *.ini и называется также как и конфиг в переменной Machine Name.
Сидит параметр в секции [EMCMOT] и имя его BASE_PERIOD =
Так же не забываем после изменения этого параметра пройти по окнам мастера дальше на страницу настройки осей и
поменять максимальные скорости движения по осям.
Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
Добавление пользовательских расширений интерфейса

Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
Распиновка LPT порта
- Unused Не использовать пин.
- AxisStep сигнал Step для драйвера шагового мотора оси Axis,управляется F и командами движения такими как ,G0,G1 и разным модальными кодами
- AxisDirection сигнал Dir для драйвера шагового мотора оси Axis,управляется F и командами движения ,G0,G1 и разными модальными кодами
- Spindle ON включение шпинделя,своего М-кода нет,устанавливается при подаче
команды выбора направленя вращения M3 или M4 - Spindle CW вращать спиндель по часовой стрелке M3
- Spindle CCW вращать спиндель против часовой стрелке M4
- Spindle PWM выход ШИМ/ДИМ сигнала управления частотой вращения шпинделя,управляется S
- Spindle Brake остановка шпинделя M5
- Coolant Mist включение стружкоотсоса M7,выключается через общею для M7 и M8 команду отключения охлаждения M9.
- Coolant Flood включение подачи СОЖ M8,выключается через общею для M7 и M8 команду отключения охлаждения M9.
- ESTOP Out Подключение логического элемента проводное НЕ-ИЛИ,в нормально состоянии отомкнут от нуля.
При аварии замыкается аварийным блоком на ноль и вызывает общею остановку всех технологических процессов.
Практически повторяет сигнал Enabled,по этому его можно назначать на соответсвующии пин платы. - Charge Pump это сигнал Enabled промодулированный не известной мне частотой (1
3 Сигнал,состоянием которого можно управлять с помощью специальных команд M62
- HomeAxis Подключение датчика дома,етот датчик определяет на оси место,
относительно которого будет выставлен её нуль.
Положение нуля задаётся координатой датчика в окошке "Настройка линейных осей",
праметр Home Switch Location . - Minimum LimitAxis Подключение датчика достижения нижней границы оси Axis,
При этом положение датчика home (Home Switch Location) и рабочей область оси (Table Travel) настраиваются так,
чтобы датчик Minimum Limit находился вне рабочего пространства.
Эти параметры находятся в окошке "Настройка линейных осей".
И так как обычно координаты станка находятся в верхнем левом квадранте то соответсвующее поле
будет в левой части параметра Table Travel указываемого в настройках соответсвующей оси. - Maximum LimitAxis Подключение датчика достижения верхней границы оси Axis,
При этом положение датчика home (Home Switch Location) и рабочей область оси (Table Travel) настраиваются так,
чтобы датчик Maximum Limit находился вне рабочего пространства.
Эти параметры находятся в окошке "Настройка линейных осей".
И так как обычно координаты станка находятся в верхнем левом квадранте то соответсвующее поле
будет в правой части параметра Table Travel указываемого в настройках соответсвующей оси. - Both LimitAxis Совместное подключение датчиков достижения верхней и нижней границ оси Axis.
- Maximum Limit + HomeAxis Совместное подключение датчиков достижения верхней границы и дома оси Axis.
- Minimum Limit + HomeAxis Совместное подключение датчиков достижения нижней границы и дома оси Axis.
- Both Limit +HomeAxis Совместное подключение датчиков достижения верхней,нижней границы и дома оси Axis.
- All Limits совместное подключение от всех осей всех датчиков границ.
- All Home совместное подключение от всех осей всех датчиков дома.
- All Limits + Home совместное подключение от всех осей всех датчиков дома и границ.
- Spindle Index .
- Spindle Phase A .
- Spindle PhaseB .
Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
Настройка линейных осей

Далее настраиваем все оси станка:
Motor Steps Per Revolution - количество шагов двигателя на один оборот.
обычно 200,но может быть и другое значение.
Driver Microstepping - настройка микрошага контроллера.
Для микрошага 1:8 устанавливайте "8".
Подробнее об определении микрошага контроллёра можно прочитать здесь:
Подключение и настройка драйвера шагового двигателя
Pulley teeth (Motor:Leadscrew) - передаточное число ременной передачи или редуктора
в формате (обороты на входе) : (обороты на выходе).
Если у вас ни то,ни другое не установлено,то ставте отношение 1:1.
Leadscrew Pitch - шаг ходового винта.
Если вы знаете название винта,то в нём должно быть что-то типа 16х5.
Где 16 диаметр винта/ШВП,а 5 это растояние на которое сместится гайка при одном обороте.
Можно поменять направление движения вдоль оси установив отрицательное значение шага винта.
Maximum Velocity - Максимальная скорость перемещения.
Maximum Acceleration - Максимальное ускорение по данной оси.
Home Location - "Домашняя" позиция оси,это значение примет координата после выполнения поиска машинного нуля.
Значение этого параметра может принимать любое значение в пределах указанного в Table Travel рабочего участка оси.
Я например предпочитаю устанавливать его не в ноль,а в такое положение в котором мне будет удобно крепить заготовку.
Table Travel - Рабочий участок оси от min до max.
При этом концевые датчики (limit) должны быть вне этого диапазона,в противном случае
при занятии крайних положении будет происходить аварийная остановка.
А вот датчики home могут быть как в этом диапазоне,так и вне его (но конечно в пределах лимитов)
Home Switch Location - Положение датчика home,определяющего нуль машинных координат.
(В УП как правило указываются относительные координаты.)
При использовании концевика (limit) в качестве качестве этого датчика
ему следует назначить координаты вне рабочего участка (Table Travel),
иначе при наезде на датчик,который во время работы будет в качестве концевого,
будет аварийная остановка.
При этом типовой настроикой этого параметра будет значение,
меньшее или большее на один милиметр концов рабочего промежутка(Table Travel).
Home Search Velocity - скорость поиска начала оси.
Этот параметр имеет положительное значение,если датчик home находится в конце оси,
и отрицательное,если в начале.
Если концевой датчик расположен рядом с концом оси это значение должно быть выбрано с учетом того,
что станок должен будет успеть остановиться до того как он ударится о конец оси.
Если концевик замыкается только когда ответная часть рядом с ним,
то скорость должна быть выбрана таким образом, чтобы станок успел остановиться до того,как концевик разомкнётся.
- "Same" При срабатывании датчика home продолжать ехать до тех пор,пока этот датчик не разомкнётся.
- "Opposite" При срабатывании датчика home остановится и ехать обратно до момента рамыкания датчика.
- Time to accelerate to max speed - время ускорения до максимальной скорости (время остановки)
- Distance to accelerate to max speed - дистанция ускорения до максимальной скорости (дистанция остановки)
- Pulse rate at max speed - частота сигналов на максимальной скорости
- Axis SCALE - количество шагов в одной единице измерения шагов/мм (шагов/дюйм)
После введения всех параметров ось можно протестировать. Для этого нажимаем Test this axis.
Так же это окошко полезно если вы хотите выставить максимальную скорость при заданном параметре "Base Period Maximum Jitter".
Я окончательно устал от поделки под названием grbl и очень хочу окунуться в мир LinuxCNC.
Засим вопрос - какой одноплатный компьютер для него лучше взять?
Свой стационарный использовать не хочу, он очень большой, да и не удобно. Хочется безвентиляторного решения запихнутого в коробку.
Что посоветует уважаемое сообщество?
В какую сторону смотреть?
Мой Ютуб канал. "Ты не дрыгайся! Показывай свою гравицаппу. Если фирменная вещь — возьмём!"
"А этот паца́к все время говорит на языках, продолжения которых не знает!"
С 2013 года много воды утекло, хочется современного, нормального.
Чтобы все летало.
Мой Ютуб канал. "Ты не дрыгайся! Показывай свою гравицаппу. Если фирменная вещь — возьмём!"
"А этот паца́к все время говорит на языках, продолжения которых не знает!"
Вы мне в теме советовали, а я вам здесь.
Не гонитесь за самым новым, крутым и мощным.
В теме про Latency test есть много конфигураций железа и большое обсуждение на тему современных компоновок проц+мама+память.
Вся боль современной компо(IT)-индустрии в том, что компы заточены под совершенно другие задачи - под многозадачность и многопроцессорность.
Технология работы с шаговыми двигателями (сервами) не подлежит распараллеливанию.
Вы не можете поручить железке отдельно управлять осью X, осью Y и Z.
Вам, хоть стой хоть падай, нужен сигнал синхронизации (и иногда и не один) и именно ОН будет определять скорость работы системы.
Добавлю к этому, что перемещение в реальном мире (немного К.О.) связано с реальным временем: ускорениями и скоростью.
Т.е. чтоб достичь какой-то скорость, нужно предать какое-то ускорение, и на этот сигнал синхронизации уже можно будет закрыть глаза.
Гонитесь за простой и стабильностью.
Выбирайте среди стационарных, компактных решений стандарта micro ITX (я выбрал ASRock j1900) - в этих мамках нету крутых навороченных штук, связанных с многопоточностью.
Мать собирается и разрабатывается сразу под конкретный! впаянный штано проц. Производитель старается сделать всё так, чтоб жрало минимум питания (а это упрощённый не требовательный БП)
Ищите либо с распаянным LPT-разъёмом либо с его шлейф-версией. Если есть желание сразу рвануть в сторону Eth подключения контроллеров, то можно сразу начать с автономных контроллеров.
Посмотрите на NC-Studio. Можете сразу подумать о блоке питания типа picoPSU, ибо его с головой хватает.

A20-OlinuXino-Lime

Мини-ПК представляет собой довольно компактный одноплатный компьютер Linux с открытой аппаратной платформой и очень хорошим набором периферийных интерфейсов. 84 x 60mm версия оснащена SATA интерфейсом, что довольно редко встречается в платах подобного типа. Есть microSD, Ethernet, HDMI и три порта USB. Можно подключить LCD-дисплей, есть поддержка батарей и 160 GPIO.
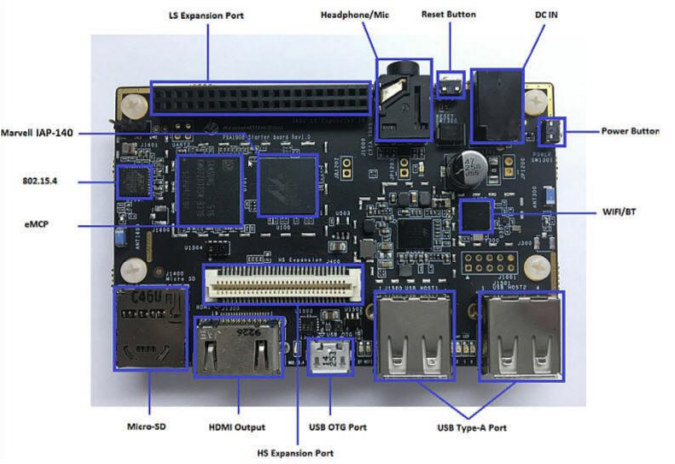
Andromeda Box Edge
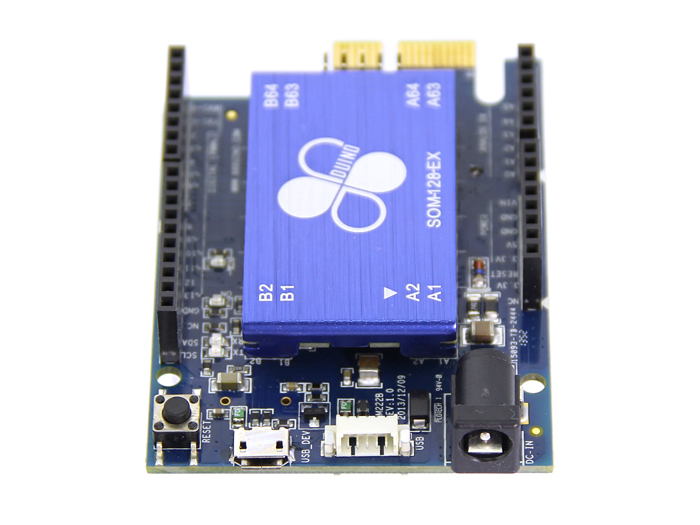
Arduino Industrial 101

Плата выполнена в форм-факторе «сэндвич» и схожа с Arduino Yun. Внутри — микроконтроллер, процессор Qualcomm Atheros AR9331 MIPS с операционной системой Linino и модулем IEEE 802.11b/g/n 1x1 2.4 ГГц WiFi. Запитывается система через mini-USB. Есть LED.
Arduino Yún Mini
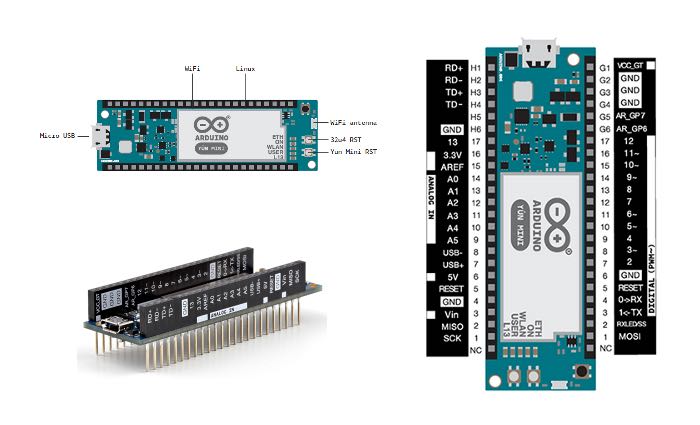
Плата представляет собой уменьшенный вариант оригинальной Yún. Работает система на основе OpenWrt (Linino), с процессором Qualcomm’s 400MHz AR9331. Чип — Atmel Atmega32U4. Плата оснащена Ethernet, USB и microSD.
Arduino Tian
Arndale Octa
В 2014 году проект Banana Pi разделился на SinoVoip и LeMaker. Как и в большинстве других проектов с Allwinner, поддержка open-source несколько урезана. Двухъядерный Banana Pi является клоном RPi Model B, в то время, как Banana Pi M2 — аналог Model B+ с 40-пиновым коннектором. Плата оснащена ГБE, WiFi, пятью портами USB и рядом интерфейсов для подключения дисплея или камеры.
BeagleBone Black, Rev C

Эта Debian-совместимая плата появилась довольно давно. Предназначена она, в основном, для промышленности. Для работы с медиаконтентом она не очень хорошо подходит. Тем не менее, плата довольно популярна, а в прошлом году появилось сразу несколько ее клонов. Некоторые проекты даже выставлялись на Indiegogo.
BeagleBone Green
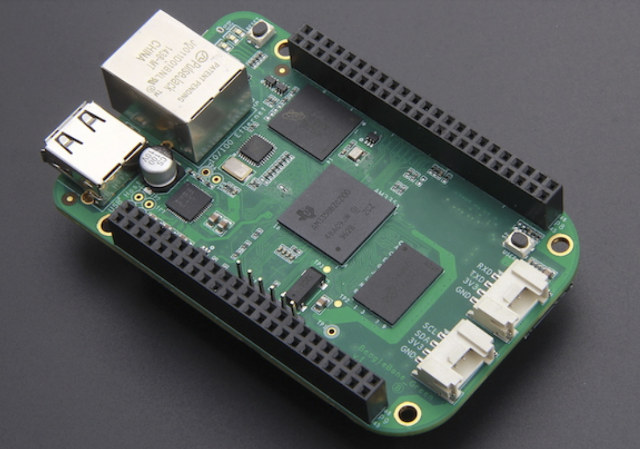
Плата позиционируется разработчиком, как мини-ПК для интернета вещей. Почти сразу после появления она стала популярной, а сейчас обзавелась крупным сообществом. BeagleBone Green (BBG) – основана на классической платформе с открытым исходным кодом BeagleBone Black (BBB), в неё добавлены два разъема Grove. В отличие от BBB платформа BBG не имеет порта HDMI, перемещен разъем USB host и обновлен разъем USB client на Micro USB. Программное обеспечение BBB полностью совместимо с BBG.
Bubblegum-96
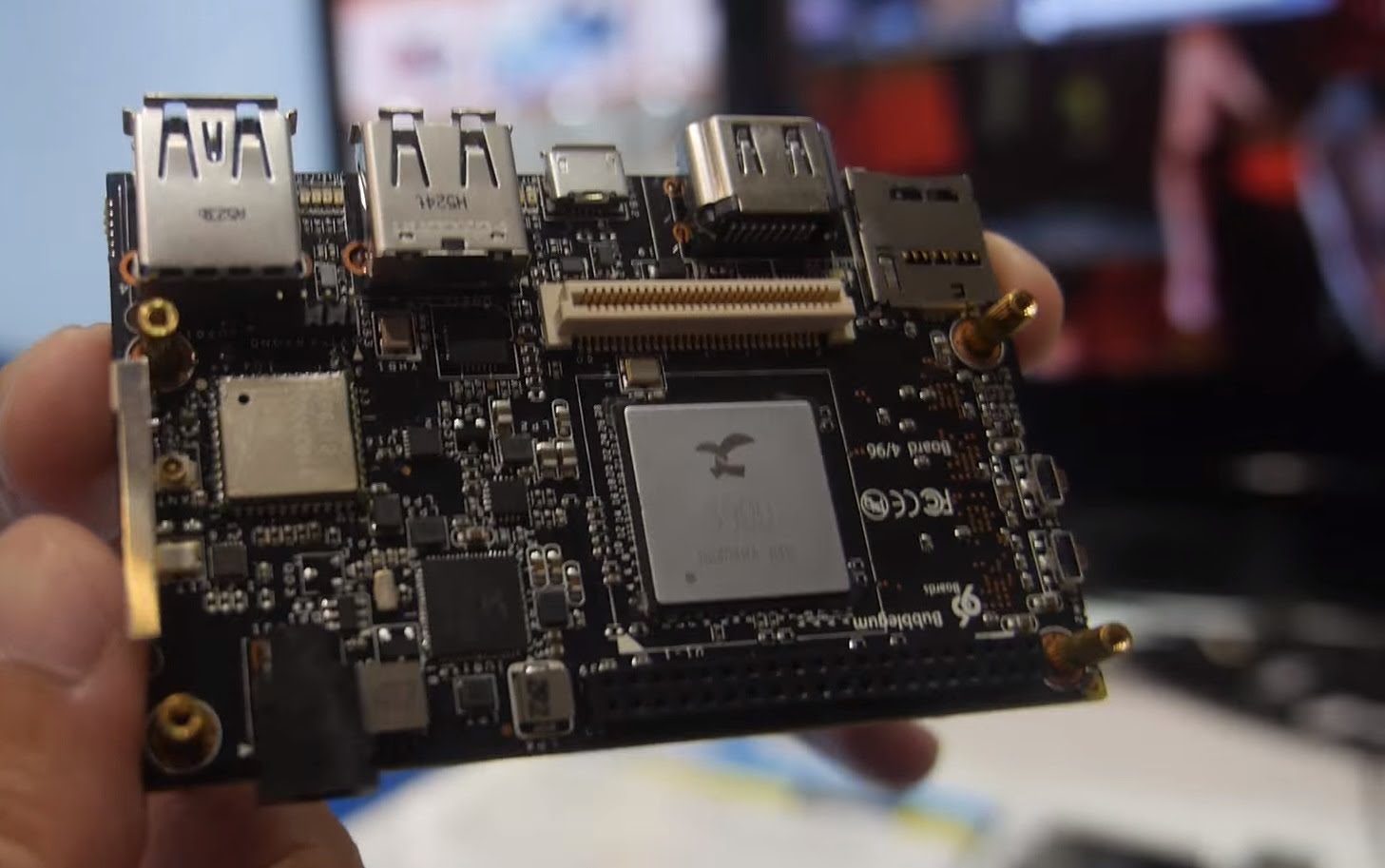
Плата основана на более прототипе ActDuino. Здесь используются спецификации Linaro 96Boards CE. К сожалению, чипа GPS от DragonBoard здесь нет, но есть быстрый SoC и 2 ГБ ОЗУ. PowerVR G6230 GPU также довольно мощный, так что эту плату можно использовать и для работы с медиа. Внутри — порт HDMI, слот microSD, порт micro-USB и два порта USB, один из которых — USB 3.0. WiFi и Bluetooth также в наличии.

@turbojedi Клаву хардварную была попытка сделать?
@001iz @Graveraider Всегда был вопрос а как у Evil персонажей могут быть романтики. Там скорее как в KoToR прогибание под свою сторону силы.
@Graveraider @001iz Q: Есть ли в игре романы? A: Да. Вы можете завести роман с 4 компаньонами, 2 из которых бисексуальны.
@001iz Заметки натуралиста, наплыв народу в комиксшопы вот произошел, после теории большого взрыва, где ненавязчиво подавалась идея что у задрота есть деньги, главное втереться к нему в доверие) Но только с хардкором тяжело.
Советуем посмотреть также Сайт Некроманта
Метки
Материалы распространяются на условиях лицензии GNU FDLСтатья для тех кто плохо знает английский и не любит читать километры форумов
Недавно я участвовал в проекте одной перспективной молодой команды Jamlab , как видно я там есть)) Это статья скорее как фиксация некоего этапа работы , показывающая что я cделал, это важно иногда фиксировать навыки в виде балов в Skills, или новых выученных трюков в Feats(Передаю привет всем ролевикам).

Table of Contents
Что такое LinuxCNC?
Linux обладает замечательными свойствами, его можно поставить куда хочешь даже на ATmega микроконтроллер. Или с помощью него можно сделать из обычного компьютера что то специфичное. Например на заре Linux его любили за то что он позволяет на дешевом оборудование создавать небольшие сервера, программно маршрутизировать пакеты и.т.д.
Состав LinuxCNC
RealTime Linux ядро
Драйвера
На данный момент хорошо реализованы и опробованы на практике, с работой в реальном времени , это параллельный порт(до 3-х штук) а также RS232 или COM-PORT.
Также ведутся работы(не могу оценить степень их активности), по реализации real time управления через Ethernet.
Итак представьте что вы делает сложную дугу, дугу можно представить как набор ступенчатых шажков.

Другой вариант использовать другой вариант и на железе с помощью ПЛИС преобразовывать G-code в управляющие сигналы, количество читаемых/передаваемых компьютером команд заметно уменьшиться, для этого и существуют MESA платы стоят они дороже чем PCI-parrport переходник.
Итак каждый компонент в HAL представлен черным ящиком с некоторым количеством ножек, каждая ножка обладает такими свойствами, как вход/выход а также тип передаваемого по ней сигнала. Ещё есть псевдо ножки, это константы, параметров компонента.
Все это похоже на блоксхемы и в итоге можно представить как вот такую вот схему(чем-то напоминает LabView, но увы удобного редактора нет).

Также с помощью специального синтаксиса макросов и языка С, можно создавать свои компоненты, с помощью утилиты comp.
Также можно вручную вводить команды с помощью halcmd , с поддержкой автодополнения, ведь файлы с расширением .hal всего лишь сценарии написанные на этом языке.
Подсветка синтаксиса
Для того чтобы .hal файлы настроек не выглядели однообразно, сделал подсветку для Emacs
Внутренняя архитектура
Здесь представлены компоненты HAL а также их деления на real time и non real time
в linuxcnc входит свой собственный интерпретатор G-code RS274NGC , который можно дополнять пользовательскими M-кодами, написанными на bash и .hal.
Набор графических интерфейсов
В общем, AXIS это основной интерфейс и его можно расширять PyVCP и GladeVCP , второе краше и Gtk виджеты лучше приспособлены для touch интерфейсов.
Измерительные и вспомогательные утилиты.
halmeter и halscope позволяют отслеживать сигналы проходящие между компонентов, разница такая же как между вольтметром и осциллографом.


Всем добрых времён суток. Помогите собрать компьютер для Linux. Суть вопроса в том, что бы собрать комплектующие таких моделей, для который 100% есть рабочие и новые драйвера. Компьютер будет использоваться для работы, а может и как маленький домашний сервер (16гб оперативы и hdd на 2 тера хватит + проц от Intel_а желательно).
Бюджет особо не ограничен, но и nvidia titan мне там точно не нужен.
+ важно что бы его хватило на долго.


Один Linux комп.
Материнка Gigabyte , Видеокарта Radeon HD 6970 (Palit??) torvn77 ★★★★★ ( 23.07.15 23:51:40 )Последнее исправление: torvn77 23.07.15 23:53:50 (всего исправлений: 1)
Другой Linux комп
Материнка тоже Gigabyte, чегог то там gama us3, так что ли? Композитинг был выключен, включил, работает. torvn77 ★★★★★ ( 23.07.15 23:58:06 )
Последнее исправление: torvn77 24.07.15 00:00:23 (всего исправлений: 1)

Intel Core i5 4570 (4 ядр.), NVIDIA GeForce GTX 760 1.5 ГБ, 16 Гб (DDR3), 2000 Гб, оптический привод DVD Multi

ну берешь свой любимый дистрибутив (наверное это будет Убунта 14.04) и создаешь профильную тему на убунто-форуме.
Сразу в лоб: Асус не поддерживает Линукс.
и если тебе нужен Интел, то и выбор тут ограничен.
Можешь взять текущее буюджетное (уже) решение на чипе Z97/H97, и процессоре Broadwell, это те, у которых кэш 4го уровня. в 128МБ
Либо жди зимы, когда SkyLake пойдут в массовую продажу.
Intel® Core™ i7-4790K Processor (8M Cache, up to 4.40 GHz) + 32Гб RAM ставь сразу, оперативка никогда не бывает лишней(современные браузеры + кодинг видео+офисы+ все остальное => жрут как не в себя => своп отключаешь /tmp->RAM - все летает), о ней вспоминаешь когда она резко кончается. Видюха не нужна - в проце есть, ее хватит на все, кроме серьезных игр. Этого процессора тебе хватит на 10 лет минимум. HDD на твой выбор - сколько нужно, столько и бери, но SSD(64Гб+) на систему нужно, не пожалеешь, ибо прирост в скорости огромен.
советовать его в 2015 году - удел идиотов
ну где-то так,
только на систему ссд уже нужен гиг на 240.
чтобы срок службы был подольше.
а вот что ставить из проца тут надо будет выбирать из сортов..
либо новый броадвел, у которого кэш.
либо между Хеон или 4790к
частота маленькая - всякие браузеры притормаживать будут,
фидюха только в качестве обогревателя, если не предполагается играть в игры 24/7, ибо встроенной достаточно
16гб рама - сегодня достаточно, а завтра нет, и не известно что будет с курсом
DVD Multi - вообще не нужен, ибо за последние 5 лет я им воспользовался 1 раз - считать данные с записанных болванок 10 лет назад. системы ставятся с флешки, 2015 год на дворе как никак.
спасибо, напомнил.
а то я, идиот, откопал диски с каким-то видосом и давай, дебилушка, совать их в ДВД в системнике. правда ДВД уже трей не выезжает, обгомнились пасики.
Ага. будущее наступило, только вот прошлое всё никак не отпустит.
ДВД для системника нужен, стоит 950руб.
в любом случае есть смысл его иметь, да хоть из ноутбука вытащить.
пользовался ДВД буквально на днях.
при переносе образа Вин10, она с флешки у меня не грузилась в Уефи и СекурБуте.
С ДВД все нормально.
Возможно стоит купить один DVD-usb и подключать ко всем устройствам где нужен, нетбук, стационарник, или еще где
с двд резаком покупай, линаксы сейчас норм с двд дружат
первый раз такую глупость слышу, двд резак в процессоре необходим, вдруг переносной оставишь в машине, а нарезать двд диск нужно будет сиюминутно?
Читайте также: