
Чем робот отличается от компьютера
Обновлено: 07.07.2024
Ссылка на первоисточник — здесь больше порядка с оформлением.
Содержание
Люди называют роботами те вещи, про которые неизвестно, что они делают полезного. Как только робот начинает делать что-то полезное, его перестают называть роботом [1].
Дмитрий Гришин, основатель инвестиционного фонда Grishin Robotics
Введение
Постоянно общаясь с разными людьми, я как человек, некоторым образом по образованию и по роду профессиональной деятельности имеющий отношение к робототехнике, неоднократно сталкивался с различными трактовками понятия «робот». Собрания специалистов в области робототехники иногда сопровождались беспощадными дискуссиями на эту тему. Дискуссии бывали столь же бесплодными в попытке прийти к единому, всеми признаваемому определению, сколь и малоосмысленными, с точки зрения неспециалиста. Какой смысл в словесной эквилибристике, думает обычный человек, если она никак не помогает в решении практических задач?
И действительно, какой смысл?

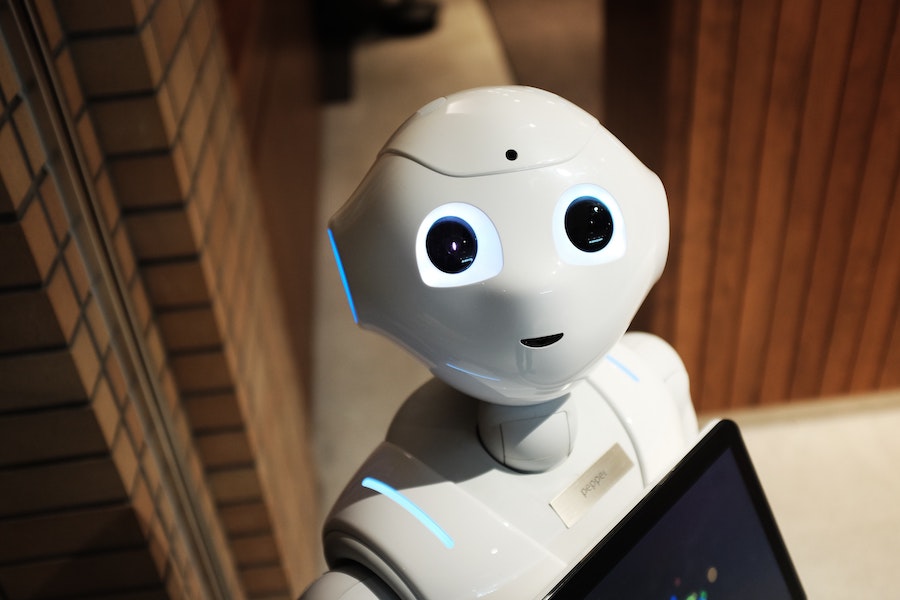
Независимо от того, какое наиточнейшее определение изобретут сами робототехники, люди все равно будут считать роботом любую рукотворную (искусственно созданную) сущность (механическое устройство или компьютерную программу), которая движется, выполняет работу, производит вычисления — в общем, функционирует — без непосредственного присутствия человека. При этом дистанционное управление люди вполне допускают.
Ситуацию запутывают и сами робототехники, то вводя новые термины для различения роботов от не-роботов (например, «робототехническая система», или «робототехническое устройство», которое, как бы, не совсем робот, «недоробот» из-за недостаточной автономности), то называя роботами устройства, которые, согласно их же определениям, роботами не являются [2].
Немного определений: стандарты по робототехнике
Но не будем голословными. Давайте посмотрим на некоторые определения. Возьмем для начала ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 [3], подготовленный крупными специалистами в данном вопросе — Государственным научным центром РФ ЦНИИ РТК, — цитирую, «на основе собственного перевода… международого стандарта ISO 8373:2012»:
робот (robot): Исполнительный механизм, программируемый по двум или более степеням подвижности, обладающий определенной степенью автономности и способный перемещаться во внешней среде с целью выполнения задач по назначению.
Пойдем по порядку. Итак, слова «исполнительный механизм» говорят нам о том, что робототехники признают роботами только некие механические агрегаты, оснащенные приводами. Этим робототехники отличаются от программистов, которые могут называть роботом или ботом
специальную программу, выполняющую автоматически и/или по заданному расписанию какие-либо действия через интерфейсы, предназначенные для людей [4].
В конце концов, вполне обычное дело, когда разные области знаний используют одни и те же слова для описания собственных смыслов. Пока просто запомним это разночтение.
Далее в ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 сказано про «определенную степень автономности», понимаемой как
способность выполнять задачи по назначению на основе текущего состояния и восприятия внешней среды без вмешательства человека [5].
Что ж, без вмешательства так без вмешательства, но зачем тогда называть роботами, например, вот это, и это, и это прекрасные устройства, демонстрируемые на сайте того же ЦНИИ РТК, работающие исключительно при дистанционном управлении человеком-оператором?

По той же причине не подходит под такое определение робота и робот «Фёдор», порадовавший нас в 2019 г. героическим полетом на МКС, поскольку он предназначен для работы под управлением человеком-оператором с помощью задающего устройства-экзоскелета в так называемом копирующем режиме.

Так все же, господа робототехники, роботы это или не роботы?
Кроме того, этакой несколько наивной формулировкой об «определенной степени автономности» разработчики стандарта как бы намекают на свою неспособность дать точное определение термину «робот». Что такое определенная степень автономности и кем она определена? Является ли признаком робота определенная полная автономность, или же определенная никакая — тоже? Впрочем, действительно, на этот вопрос однозначно не ответить, но, по крайней мере, отмечено стремление хоть к какой-нибудь автономности.
Далее имеем неточность в словах «способный перемещаться во внешней среде», так как перемещение представляет собой
изменение местоположения физического тела в пространстве… и т.д. по тексту [6].
Современный промышленный робот-манипулятор, который не изменяет своего местоположения в пространстве, но отвечает другим предъявленным требованиям (программируется по двум и более степеням подвижности и обладает определенной степенью автономности, особенно если, скажем, оснащен техническим зрением), должно быть, с удивлением узнает, что он роботом не является. Здесь была бы более точна формулировка из предшествующего ГОСТ Р ИСО 8373-2014 [7] от ООО «НИИ экономики связи и информатики «Интерэкомс», который как раз и был заменен обсуждаемым более свежим стандартом, а именно: «движущийся внутри своей рабочей среды».

Робот youBot от KUKA — манипулятор на мобильной платформе — способен перемещаться во внешней среде

Промышленные манипуляторы KUKA — неспособны перемещаться во внешней среде
Кстати, в англоязычном оригинале [8] это определение звучит так:
robot
actuated mechanism programmable in two or more axes with a degree of autonomy, moving within its environment, to perform intended tasks
Мне кажется, коллеги из НИИ экономики связи и информатики лучше разобрались в роботах, чем коллеги из ЦНИИ робототехники. Шутка (зато термин «степень подвижности» от ЦНИИ РТК более уместен, чем «ось» от «Интерэкомс»). Но и в целом, ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 грешит подобными неточностями (где в переводе, а где и в робототехнической терминологии).
Зато в нём же приведена сноска с еще одним, чуть менее противоречивым, определением робота:
ИСО/ТК 299 «Робототехника» в 2018 году принял новое определение: робот (robot): Программируемый исполнительный механизм с определенным уровнем автономности для выполнения перемещения, манипулирования или позиционирования [9].
Мы обсудили свежие стандарты по робототехнике. А ведь ещё есть и более ранние. Правда, они были выпущены в 1980-х гг. и уже настолько устарели, что вовсе не помогут нам в понимании, что же такое современный робот.
Что ж, будем считать, что со стандартами стало яснее. А вот с роботами — нет. Какая-то путаница.
Продолжение поиска: словари и мнения
Может быть, поискать альтернативные источники, которые сразу нам всё в корне разъяснят?
Если мы посмотрим на определения термина «робот» в различных словарях, то встретим что-то подобное:
РОБОТ (чеш. robot) — термин, употребленный впервые К. Чапеком в пьесе «R. U. R.» в 1920, которым часто обозначают машины с т. н. антропоморфным (человекоподобным) действием; обычно им придают внешнее сходство с человеком. Такие роботы, как правило, экспонаты технических выставок. В промышленном производстве и научных исследованиях применяют промышленные роботы — автоматические программно-управляемые манипуляторы, выполняющие рабочие операции со сложными пространственными перемещениями [10].
Робот
(чеш. robot, от robota — подневольный труд, rob — раб)
машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром [11].
РОБОТ — стационарная или передвижная автоматическая машина (или дистанционно управляемый механизм), способная выполнять аналогично человеку двигательные (см. манипулятор) и управляющие функции и призванная заменить человека при выполнении тяжёлой, однообразной или опасной для его жизни и здоровья работы, а также при проведении её при недоступности объекта. Р. может быть запрограммирован на самообучение, выполнение различных видов сложных технологических операций при функционировании с различными моделями технологического оборудования и т.п. [12].
Робот (чеш. robot, от robota — «подневольный труд») — автоматическое устройство, предназначенное для осуществления различного рода механических операций, которое действует по заранее заложенной программе [13].
A robot is a machine — especially one programmable by a computer — capable of carrying out a complex series of actions automatically [14].
Обобщая, выделим те общие понятия, которыми, применительно к роботам, оперируют во всевозможных комбинациях приведенные цитаты:
- робот — это машина;
- антропоморфность, т.е. сходство с человеком — внешнее и/или по выполняемым действиям — с целью замены человека (или иногда и животного?);
- автономность: в диапазоне от полностью автоматического функционирования до всего лишь выполнения сложных последовательностей автоматических действий, а может быть, даже и до дистанционного управления (непосредственно вручную);
- уровень организации программного управления: от выполнения операций по чётко ограниченной заранее заложенной программе до возможности самообучения (а, там же ещё что-то говорилось и про ручное дистанционное управление);
- ещё вот: робот — это то, что придумано писателем Карелом Чапеком… Ой, пожалуй, это не надо.
Фрагмент спектакля по пьесе К. Чапека «R.U.R.» («Россумские универсальные роботы»)
М-да-а-а. Похоже, единственное, в чем полностью сходятся все определения, так это в том, что робот — это машина, т.е. «устройство, выполняющее механические движения с целью преобразования энергии, материалов или информации» [15].
Но подождите. Дадим слово представителю робототехников новой формации — Дмитрию Гришину, основателю инвестиционного фонда Grishin Robotics:
Вот так вот! Дмитрий максимально широко трактует понятие «робот» и относит к роботам и банкоматы, и автомобильные навигаторы, и даже «умные» часы и «умные» камеры! [17]
А если мы вспомним, что многие современные молодые люди, в массе своей больше знакомые с IT, чем с производством, повседневно называют роботами отдельный вид компьютерных программ.
… то, видимо, мы никогда не разберемся, что такое роботы!
Так что же такое робот?
Исходя из приведенных выше определений, если бы мы захотели чёткой однозначности понятий, мы могли бы пойти двумя путями:
- расширительное толкование: считать роботами вообще всё, что подходит хоть под какой-то из перечисленных признаков;
- ограничительное толкование: не признавать роботами вообще ничего, что не соответствует строго всем признакам.
В первом случае ситуация не сильно изменится, в сравнении с имеющимся положением дел. Всё равно сейчас робототехники, условно говоря, как хотят, так и называют свои и чужие разработки.
Во втором случае список известных нам роботов будет нещадно порезан. Роботами останутся считанные единицы. Например, такие, как робот Atlas от Boston Dynamics. По поводу него сомнений не возникает: это робот. Согласно любым определениям. Но таких будет о-о-очень мало. Даже большинство промышленных манипуляторов придется исключить. Так зачем же нам такая терминология «для избранных»?
Думаю, надо честно признать, что на данный момент мы не сможем придумать бесспорное, устраивающее всех определение понятия «робот», которому, к тому же, все будут неукоснительно следовать. Да оно и не нужно! Иначе, разговаривая с не подкованными теоретически людьми (заказчиками, коллегами, знакомыми), мы вынуждены будем постоянно их поправлять: «Нет, это не робот. А вот это, да, кажется робот… Если я не ошибаюсь… Подождите, проверю. » Это утомительно и отвлекает от других дел, полезных.
Итак, во-первых. На уровне обиходного использования вполне можно согласиться с приведенной в начале статьи интуитивной трактовкой неспециалистами понятия «робот» — рукотворной (искусственно созданной) сущности (механического устройства или компьютерной программы), которая движется, функционирует (выполняет работу, производит вычисления) без непосредственного присутствия человека.
Во-вторых. Для себя, мощных робототехников, нам будет полезно знать несколько типовых признаков, характеризующих (но не всегда определяющих) робот:
- приводной механизм — обязательный признак;
- программное управление — обязательный признак;
- выполнение поставленных человеком задач — обязательный признак;
- некоторая (большая или меньшая) автономность — а этот признак размыт даже в своей постановке и отражает, скорее, стремление к автономности.
И при этом мы помним, что в других областях могут быть собственные определения понятия «робот», такие как вот это, родившееся в мире информационных технологий. Виртуальный мир — он вообще склонен переносить понятия из реального мира к себе, одновременно дополняя их своими, новыми смыслами.

Вот так, например, выглядит голосовой бот Robovoice, по мнению его разработчиков
Ну, и в-третьих. Для буквоедов и заядлых классификаторов приведём определение робота на основе взятого из ГОСТ, только немного исправленное:
Робот — программируемый исполнительный механизм, обладающий некоторой степенью автономности и движущийся внутри своей рабочей среды с целью выполнения задач по назначению.
Вот так. Пусть каждому будет своё, и все будут довольны.
В заключение, в качестве юмора, обращаю внимание на цитату, взятую эпиграфом к данной статье. Не кажется ли вам, что она очень забавно и точно отражает реальность? Действительно, на заводах работают манипуляторы, квартиры убирают пылесосы, в небе летают беспилотники, в космосе — спутники, а на Луну, планеты и астероиды высаживаются зонды, межпланетные станции и планетоходы. Роботы, на самом деле, гораздо раньше заняли место в нашей жизни, чем мы это заметили! Даже если их не называют роботами, имеет ли это для них значение? Нет, они просто делают свою работу. Так что пожелаем всяческих успехов разработчикам стандартов в их трудном и важном деле формулирования точных определений. Для нас же важнее делать нашу работу.
Сегодня на многих конференциях и во многих публикациях обсуждаются вопросы, связанные с использованием искусственного интеллекта (далее – ИИ) и роботов. Но высказываемые позиции иногда сложно поддержать ввиду очевидного непонимания спикерами/авторами того, что же собой представляет ИИ и (или) робот.
В преддверии «IP-battle: интеллектуальные права на объекты, создаваемые искусственным интеллектом (роботом)», мне показалось правильным уделить некоторое внимание вопросу, вынесенному в заголовок настоящей статьи, и попробовать нивелировать проблему признания ИИ/робота субъектом права.
Как известно, существует прецедент признания за роботом правосубъектности – речь идет о известном человекоподобном роботе Софии, получившей гражданство Саудовской Аравии[1]. Этот прецедент, по всей видимости, стал результатом активно прорабатывающейся на тот момент идеи признания «электронной личности» для обеспечения прав и обязанностей ИИ, в связи с которой Европейским парламентом предлагалось разработать ряд нормативных актов, регулирующих использование и создание ИИ и роботов[2]. Но в большинстве стран позиция, предполагающая признание ИИ или робота полноценным субъектом права, пока не нашла широкой поддержки. Вместе с тем, например, в Соединенном Королевстве недавно была подана патентная заявка, в которой в качестве автора изобретения был заявлен ИИ[3].
Что собой представляет ИИ?
Как известно, ИИ – понятие многоаспектное: под ним понимают и область информатики, и междисциплинарную науку, и способность информационной системы правильно интерпретировать данные, используя полученный результат для достижения конкретной цели, и саму информационную систему и проч.
В целях настоящей статьи ИИ рассматривается в качестве интеллектуальной системы (информационно-вычислительной системы), способной без участия человека[4] решать задачи, в том числе относящиеся к творческим, в также самообучаться в ходе решения таких задач. Такая система включает в свой состав три основных блока:
– базы данных (наборы больших данных) и знаний о предметной области, включая результаты машинного обучения;
– решатель – компьютерную программу, которая на основе специализированных обучающихся алгоритмов, разрешает поставленные задачи;
– интеллектуальный интерфейс – совокупность средств, методов и правил, которые позволяют человеку вести общение с самой интеллектуальной системой.
В статье Википедии, посвященной ИИ[5], обращается внимание на то, что словосочетание Artificial Intelligence (AI), предложенное Дж. Маккрти еще в 1956 г., вовсе не связывалось его автором с пониманием интеллекта у человека – под intelligence понималась «вычислительная составляющая способности достигать целей в мире»[6], разные виды которой встречаются не только у людей, но и у животных, и у некоторых машин. В связи с этим в отечественных публикациях обычно подчеркивается, что слово «intelligence» в используемом контексте означает скорее «умственные способности» или «умение рассуждать разумно», а вовсе не «интеллект», для которого есть английский аналог «intellect».
Таким образом, можно сделать вывод о том, что перевод словосочетания «Artificial Intelligence» на русский язык как «искусственный интеллект» не является верным – вероятно, точнее было бы перевести его, например, как «искусственный разум». Но поскольку термин «искусственный интеллект» уже прочно вошел в отечественный обиход, в рамках настоящей статьи не будет предлагаться его замена или коррективы. В то же время нужно учитывать обозначенный нюанс, так как в некоторых случаях он вполне способен оказать влияние на исследовательские выводы.
В развитие изложенного хотелось бы процитировать публикацию Константина Хайта, который пишет о том, что словосочетание «искусственный интеллект» сегодня имеет совсем не тот смысл, который пытаются вложить в него журналисты и философы, и более того, это словосочетание представляет собой одну из главных лингвистических подтасовок современности: «То, что человек решает некоторую задачу определенным способом, вовсе не означает, что компьютер решает ее точно таким же способом. Однако, вольная или невольная подтасовка, кроющаяся за словосочетанием «искусственный интеллект» намного глубже»[7]. Поясняя свою позицию, автор подчеркивает: «Интеллект – это штука, прямо обратная алгоритму, который… есть «ясная, точная последовательность действий, заведомо приводящая к результату». Словосочетание «интеллектуальные алгоритмы» – оксюморон, интеллект как раз и применим в тех случаях, когда приемлемого алгоритма не существует… Проблема в том, что человек и компьютер устроены фундаментально по-разному. Все, что умеет компьютер – считать. Выполнять последовательные вычислительные операции с сумасшедшими по человеческим меркам скоростями. Компьютер спроектирован для реализации алгоритмов, и эту задачу он решает блестяще. Человек изначально не приспособлен для выполнения алгоритмов. мы не умеем вычислять. Наш мозг приспособлен для единственной операции – поиска ассоциативных связей. Любую задачу человек решает подбором подходящих ассоциаций. И делает это несоизмеримо лучше любого компьютера»[8]. В качестве примера автор рассматривает распознавание лиц: «Действительно, эту задачу человек и машина сейчас решают приблизительно на одном уровне успешности. Правда, делают это совершенно по-разному. Компьютер – обсчитывает характеристические точки и вычисляет корреляцию, человек – ищет в памяти ассоциации и устанавливает связи между ними. Пока речь идет о частном вопросе «определите кто это», оба подхода дают примерно эквивалентные результаты. Но, если ставить задачу шире, пути человека и компьютера резко расходятся в соответствии с принципами функционирования. Машина, выполняющая алгоритм, с относительной легкостью обсчитает хоть десять изображений, хоть пятьсот, хоть полмиллиона, хватило бы вычислительных мощностей… Зато homo sapiens столь же просто определит доброе перед ним лицо, или злое, взволнованное, или спокойное, привлекательное, или отталкивающее. Наш мозг заточен не на перебор, а на сравнение, причем сравнение ассоциативное, то есть использующее неполностью определенный эталон»[9].
С учетом всего изложенного на сегодняшний день вряд ли можно признать искусственный разум равным человеческому: ИИ сегодня – это только быстродействующая вычислительная машина, использующая заложенные в нее обучающиеся алгоритмы для решения конкретных задач. Да, это очень сложная информационно-вычислительная система, но она решает задачи, которые поставлены ей человеком, на основе алгоритмов, разработанных человеком, не выходя за рамки, обозначенные человеком. Поэтому явно преждевременно настаивать на правосубъектности ИИ, признавая его полноценным членом общества, отношения с которым остро нуждаются в соответствующем правовом регулировании.
Задача создания интеллекта, действительно сопоставимого с человеческим, стоит на повестке дня, и ученые говорят о некоторых подвижках в этой области. Вместе с тем сегодня определяющим является следующий вывод: «Мы используем искусственный интеллект в тех областях, где человеческий работает не лучшим образом. Создать конкурента человеческому разуму во всех его проявлениях пока не получилось»[10].
Что собой представляют роботы?
Выше разбиралась ситуация, когда ИИ «обитает» в компьютере. В настоящей части статьи будет рассматриваться «воплощение» ИИ в роботе.
Слово «робот» у многих вызывает стойкую ассоциацию с человекоподобными роботами[11], которые могут управлять конечностями, слухом, зрением и речью, манипулировать предметами, общаться с человеком и проч. Между тем, различаясь по своему назначению и исполняемым функциям (например, промышленные роботы бывают сварочные, режущие, комплектовочные, сборочные, упаковочные и проч.), роботы существенно разнятся и по внешнему виду: нередко робот – это всего лишь механическая «рука», которая осуществляет запрограммированные манипуляции. Да и роботы-гуманоиды далеко не во всех случаях полностью воспроизводят человека: например, уже упоминавшийся робот София имеет только верхнюю часть «туловища», а задняя часть ее головы сделана из прозрачного пластика, через который видно устройство ее «мозга».
Под роботами традиционно понимаются автоматические устройства (создаваемые обычно по принципу живого организма), которые предназначены для осуществления определенных операций, действуют по заложенной программе и получают информацию от датчиков. Но такое определение годится, скорее для первых двух поколений роботов.
Роботы первого поколения – это программные роботы (роботы с программным управлением), которые выполняют четко определенные операции в последовательности, жестко заложенной программой. Это как раз и есть те самые промышленные роботы, которые осуществляют транспортировку, сварку, штамповку, простейшие сборочные операции и т.д.
Роботы второго поколения – это очувствленные роботы, которые также выполняют операции в соответствии с программой, но нуждаются в получении информации извне, что и обусловило наделение их искусственными «органами чувств»: тактильными, зрительными, звуковыми, кинестетическими и другими сенсорными датчиками. Работа роботов второго поколения предполагает использование алгоритмического и программного обеспечения, что позволяет роботам ориентироваться в существующих условиях и автоматически приспосабливаться (адаптироваться) в случае изменения этих условий (что и объясняет их второе название – адаптивные роботы), а также обучаться в процессе функционирования.
В целях настоящей работы интерес представляют роботы третьего поколения – интеллектуальные роботы, которые предназначены не только для осуществления физических и двигательных функций, но и для решения интеллектуальных задач. Речь не только о роботах-андроидах, игровых и бытовых роботах, но и военных, боевых, морских роботах, беспилотных летательных аппаратах и беспилотных автомобилях, космических и медицинских роботах, экзоскелетах и т.д. Эти роботы, бесспорно, отличаются от роботов второго поколения сложностью управляющей информационно-вычислительной системы, включающей элементы ИИ. Но несмотря на то, что интеллектуальный робот управляется ИИ, он вовсе не становится самостоятельной «электронной личностью», способной критически мыслить, – на сегодняшний это все та же информационно-вычислительная система, ограниченная заложенным в нее функционалом и имеющая соответствующую ее функциям материальную оболочку.
Изложенное позволяет говорить о том, что сегодня человечество и близко не подошло к тому, чтобы признавать ИИ или интеллектуальных роботов субъектами права.
Но вместе с тем использование ИИ порождает массу вопросов, связанных с возникновением интеллектуальных прав на объекты, которые созданы с «участием» и «единолично» ИИ. Каким образом следует решать вопрос принадлежности интеллектуальной собственности для целей оборота, например, когда автором картины является интеллектуальный робот, написавший ее самостоятельно? Да и возникают ли в таких случаях интеллектуальные права? И если да, то кто становится правообладателем – владелец робота, разработчик ПО, «человек, нажавший кнопку»? Или в ситуации, когда результаты творчества представляют собой итог использования специальной программы, включающей элементы ИИ, – можно ли говорить здесь о возникновении интеллектуальных прав у лица, использующего такую программу?
P.S. лента новостей IP CLUB в сфере права интеллектуальной собственности и цифрового права (IP & Digital Law) в:
[1] Morby Alice. Saudi Arabia becomes first country to grant citizenship to a robot
[4] В этом ее отличие от интеллектуализированной системы, которая решает задачи с участием лица, принимающего решение.

Роботы интересны нейронаукам, а нейронауки интересны роботам — об этом была наша статья «Neuroengineering challenges of fusing robotics and neuroscience» в журнале Science Robotics. Такое совместное развитие способствует прогрессу в обеих отраслях, приближая нас к созданию более совершенных роботов-андроидов и к более глубокому пониманию устройства нашего мозга. А в какой-то степени — к объединению биологических организмов с машинами, к созданию кибернетических организмов (киборгов).
Нейронаука для роботов
По своему устройству роботы нередко копируют человека. Это касается той части роботов, которым важно имитировать человеческие действия и поведение — индустриальным машинам нейронауки не так важны.
Самое очевидное, что могут использовать при разработке робота — делать его внешне похожим на человека. Роботы часто имеют две руки, две ноги и голову, даже если это не обязательно с инженерной точки зрения. Особенно это важно в тех случаях, когда робот будет взаимодействовать с людьми — похожей на нас машине проще доверять.
Можно сделать так, чтобы не только внешний вид, но и «мозг» робота был похож на человеческий. Разрабатывая механизмы восприятия, обработки информации и управления, инженеры вдохновляются устройством нервной системы людей.
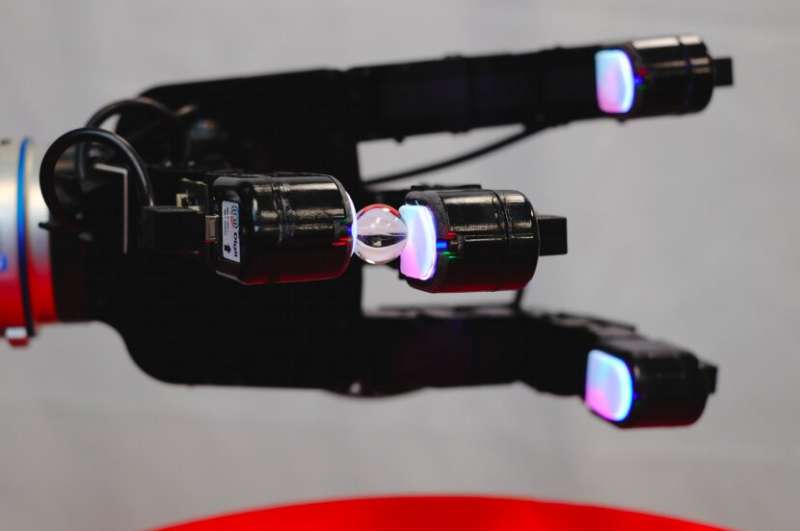
Например, глаза робота — телекамеры, которые могут двигаться в разных направлениях — имитируют зрительную систему человека. Опираясь на знание о том, как устроено зрение человека и как происходит обработка зрительного сигнала, инженеры проектируют сенсоры робота по тем же принципам. Таким образом робота можно наделить, например, человеческой способностью видеть мир трехмерным.

У человека есть вестибулоокулярный рефлекс: глаза при перемещении стабилизируются с учетом вестибулярной информации, что позволяет сохранять стабильность картинки, которую мы видим. На теле робота также могут быть датчики ускорения и вертикализации. Они помогают роботу учитывать движения тела для стабилизации зрительного восприятия внешнего мира и совершенствования ловкости.
Кроме того, робот может ощущать точно так же, как человек — на роботе может быть кожа, он может чувствовать прикосновение. И тогда он не просто произвольно движется в пространстве: если он дотрагивается до препятствия, он его ощущает и реагирует так же, как человек. Он может использовать эту искусственную тактильную информацию и для схватывания предметов.
У роботов можно имитировать даже болевые ощущения: какое-то прикосновение ощущается нормально, а какое-то вызывает боль, что в корне меняет поведение робота. Он начинает избегать боли и вырабатывает новые модели поведения, то есть обучается — как ребенок, который впервые обжегся чем-то горячим.
Не только сенсорные системы, но и управление своим телом у робота можно спроектировать по аналогии с человеком. У людей ходьбой управляют так называемые центральные генераторы ритма — специализированные нервные клетки, предназначенные для контроля автономной моторной активности. Есть роботы, в которых для управления ходьбой была использована та же идея.
Кроме того, роботы могут обучаться у людей. Робот может совершать действия бесконечным числом способов, но если он хочет имитировать человека, он должен наблюдать за тем, как человек это делает, и пытаться повторить это движение. При совершении ошибок он сравнивает это с тем, как это же действие совершает человек.
Роботы для нейронауки
Как может использовать роботов нейронаука? Когда мы изготовляем модель биологической системы, мы начинаем лучше понимать, по каким принципам она работает. Поэтому создание механических и компьютерных моделей управления движениями нервной системой человека приближает нас к пониманию нервных функций и биомеханики.
А наиболее перспективное направление использования роботов в современной нейронауке — это проектирование нейроинтерфейсов, систем для управления внешними устройствами с помощью сигналов мозга. Нейроинтерфейсы необходимы для разработки нейропротезов (например, искуственной руки для людей, лишившихся конечности) и экзоскелетов — внешних каркасов тела человека для увеличения его силы или восстановления утраченной двигательной способности.

Робот может взаимодействовать с нервной системой через интерфейс в двух направлениях: нервная система может подавать командный сигнал роботу, в робот от своих сенсоров может подавать человеку сенсорную информацию, вызывая реальные ощущения — за счет стимуляции нервов, нервных окончаний кожи, или самой сенсорной коры мозга. Такие механизмы обратной связи позволяют восстановить чувствительность конечности, если она была утрачена. Они также необходимы для более точных движений роботизированной конечностью, так как именно на основе сенсорной информации от рук и ног мы корректируем движения.

Здесь возникает интересный вопрос — следует ли нам управлять через нейроинтерфейс всеми степенями свободы робота, то есть насколько конкретные команды мы должны ему посылать. Например, можно «приказать» роботизированной руке взять бутылку воды, а конкретные операции — опустить руку, повернуть ее, разжать и сжать пальцы — она совершит сама. Этот подход называется совмещенным контролем — через нейроинтерфейс мы даем простые команды, а специальный контроллер внутри робота выбирает наилучшую стратегию для реализации. Либо можно создать такой механизм, который не поймет команды «взять бутылку»: ему нужно посылать информацию о конкретных, детализированных движениях.
Современные исследования
Ученые в области нейронаук и робототехники изучают различные аспекты работы мозга и устройства роботов. Так, в университете Дьюк я проводил эксперименты с нейроинтерфейсами на обезьянах — так как для точной работы интерфейсов необходимо их прямое подключение к зонам мозга и не всегда такие экспериментальные вмешательства возможны на людях.
В одном из моих исследований обезьяна ходила по дорожке, активность ее моторной коры ее мозга, ответственной за движение ног, считывалась и запускала ходьбу робота. При этом обезьяна наблюдала этого ходящего робота на экране, который был перед ней расположен.
Обезьяна использовала обратную связь, то есть корректировала свои движения на основе того, что она видит на экране. Таким образом разрабатываются наиболее эффективные для реализации ходьбы нейроинтерфейсы.
Кибернетическое будущее
Подобные исследования ведут нас к инновационным разработкам в будущем. Например, создание экзоскелета для восстановления движений у полностью парализованных людей уже не кажется недостижимой фантазией — необходимо только время. Этот прогресс может сдерживать недостаточная мощность компьютеров, но за последние десять лет развитие и здесь было колоссальным. Вполне вероятно. что скоро мы увидим вокруг людей, которые используют для передвижения не коляски, а легкий, удобный экзоскелет. Люди-киборги станут для нас чем-то обыденным.
Коммерческая разработка таких систем идет по всему миру, в том числе и в России. Например, в известном проекте ExoAtlet разрабатывают экзоскелеты для реабилитации людей с двигательными нарушениями. Центр биоэлектрических интерфейсов НИУ ВШЭ поучаствовал в разработке алгоритмов для этих машин: директор Центра профессор Алексей Осадчий и его аспиранты разработали нейроинтерфейс, запускающий шагательные движения экзоскелета.

Быстрое развитие человекоподобных роботов-андроидов тоже становится реальностью. Вполне вероятно, что скоро вокруг нас будут ходить роботы, которые будут имитировать нас во многих аспектах — двигаться как мы и думать как мы. Они смогут выполнять часть работы, прежде доступной только человеку.
Очевидно, что мы будем видеть развитие и робототехники, и нейронаук, и эти области будут сближаться. Это не только открывает новые возможности, но и создает новые этические вопросы: как мы должны относиться к роботам-андроидам или людям-киборгам.
И все-таки пока человек лучше, чем робот, во многих отношениях. Наши мышцы наиболее экономичны: достаточно съесть бутерброд, чтобы хватило энергии на весь день. У робота заряд батарей закончится через полчаса. И хотя может быть гораздо мощнее, чем человек, он часто оказывается слишком тяжелым. Элегантность и оптимизация энергетических затрат — тут человек пока превосходит робота.
Хотя недалеко то будущее, когда это изменится — в этом направлении работают десятки тысяч талантливых ученых и инженеров.
Подписывайтесь также на Telegram-канал РБК Тренды и будьте в курсе актуальных тенденций и прогнозов о будущем технологий, эко-номики, образования и инноваций.
• как могут выглядеть роботы;
• что такое робот и как его распознать;
• какие дополнительные элементы может иметь робот;
• что может заставить робота двигаться;
• где встречаются роботы дома и в городе;
• что умеют роботы и в каких областях им уже нашлось применение.
Оглавление
Что такое робототехника
Познакомьтесь с ментором курса: Николай Пак, основатель «Лиги Роботов», федеральной сети секции робототехники. В этом видео он расскажет о том, что такое робототехника, каковы основные составляющие робота и какие он может выполнять задачи.
Такие разные
Услышав слово «роботы», вы наверняка представляете себе что-то хотя бы отдаленно похожее на человека или животное. Однако в жизни это не всегда так: форма, вид и размер робота определяются задачей, которую он решает.

Кто здесь робот?
Все объекты на картинках — роботы, каждый из них автоматизирует какую-то работу, выполняя заранее заданную функцию.
Антропоморфный робот заменяет человека на опасной работе
Кодовый замок «охраняет» вход в здание
Стиральная машина берет на себя стирку, полоскание и отжим
Дрон обеспечивает обзор с высоты без участия пилота
Фитнес-браслет считает шаги и потраченные калории вместо тренера
Понять, кто перед вами, помогут общие для всех роботов признаки. О них мы поговорим в следующей части модуля. Пока важно запомнить: робот может выглядеть как угодно.
Что робототехники называют роботом?
Как видите, внешнее сходство с живыми существами — не обязательный признак робота. По мнению специалистов, робота можно описать так:
Как следует из определения, робот может выглядеть как угодно. Роботом его делают «признаки робота», а не внешний вид. Давайте разберемся.
Как устроен робот и как он работает
Каждый робот — это набор конкретных деталей, а зачастую и программ, подобранных для выполнения нужных нам действий. Но чем бы ни занимался и из чего бы ни состоял наш робот, для совершения действия он всегда будет собирать информацию, анализировать ее и действовать по результатам этого анализа.
Изучите схему, чтобы узнать, что делают привычные вам роботы на каждом из этапов и какие устройства при этом задействуют.

Робот получает информацию или испытывает воздействие извне. Для этого он использует датчики, сенсоры и другие устройства. Сенсор движения, который включает электричество, когда мы входим в помещение, валидатор проездного в метро, микрочип для распознавания голоса в голосовых помощниках — все это устройства для получения информации из окружающей среды.
Шаг 2 — Мозг.
Робот перерабатывает полученную информацию по заранее заданному алгоритму. В разные времена и в разных ситуациях алгоритм работы задавали по-разному. Так, первые механические роботы начинали двигаться, когда их заводили, как часы. Сегодня «решение» обычно принимает маленький бортовой компьютер — микроконтроллер с записанной на него программой. Скажем, на основе данных с сенсора движения микроконтроллер дает освещению команду включиться или выключиться. Другой микроконтроллер решает, открывать ли турникет метро. Третий сопоставляет голосовую команду с заданным алгоритмом и по просьбе хозяина включает телевизор. Это — устройства анализа полученной информации.
Шаг 3 — Рука.
Робот выполняет нужную операцию. Программа или механизм решают, приводить робота в действие или нет. Если да — он включается и делает то, для чего предназначен. Свет включается будто сам собой, турникет метро открывается и пропускает пассажира, телевизор включается на нужной программе — это устройства, которые исполняют команды.
Как понять, что перед вами робот? Обязательные элементы
Определить, робот перед вами или нет, можно, обратив внимание на характерные признаки. У робота всегда есть:

Система датчиков — через нее робот получает информацию из внешнего мира. Например, это датчики движения, сенсоры обнаружения препятствий и т. п.
Цель — «смысл жизни робота», та задача, ради автоматизации которой его придумали.
Алгоритм действий — по нему робот выполняет нужные действия в разных условиях в соответствии с поставленной целью (сегодня это обычно программа, раньше мог быть механизм).
Исполняющее устройство — двигатель, «руки», «ноги». То, что приводит робота в действие или изменяет его положение в пространстве.
Система, в которую объединены первые четыре пункта, то, как они связаны и взаимодействуют.
Что часто добавляют к роботам. Дополнительные элементы
Датчик, алгоритм, исполняющее устройство — это основа, заложенная внутрь любого робота. Но обойтись только этим набором сложно. Чтобы робот мог решать больше задач, а работать с ним было удобнее, к основе часто добавляют разные детали. Ниже мы собрали самые популярные (но помните, что одними ими список не ограничивается).

Как заставить робота работать: 5 основных способов
Итак, роботы могут выглядеть по-разному, состоять из различных деталей и выполнять какие угодно задачи. Приводить их в действие тоже можно разными способами — одни известны веками, другие появились у человечества недавно.
Механические
Заводные механические устройства использовали еще древние греки, а первый антропоморфный механический робот появился в XII веке у арабов. В наши дни механику блестяще использует нидерландский художник Тео Янсен: его знаменитые «шагающие фигуры» приводятся в действие ветром, прибоем или человеком.

Гидравлические
Такие роботы используют в работе законы движения жидкостей. Регулируя уровень и давление жидкости в системе, мы добиваемся от устройства нужных действий. Таких роботов часто можно встретить в промышленности: они способны прикладывать огромную силу и при этом работать быстро и аккуратно. Именно гидравлические приводы часто используются у роботов-грузчиков

Первым таким роботом принято считать миниатюрное радиоуправляемое судно, которое разработал в конце XIX века Никола Тесла. В 1930-х появились первые устройства, которые напоминали человека и могли выполнить простейшие действия и даже воспроизводить отдельные фразы. Сегодня электронные элементы в роботах используются очень широко, но зачастую в комбинации с другими типами систем.

Софтверные
Это роботы-программы, которые умеют взаимодействовать с объектами реального мира и давать осязаемый результат. «Умный дом» в городе, «умная теплица» на ферме, «умный климат-контроль» в офисе, программа, которая включает сеть уличного освещения по расписанию — это тоже роботы.

Комбинированные роботы
Самый распространенный на сегодня вид роботов. Одного принципа работы часто не хватает для решения продвинутых задач, и инженеры соединяют внутри робота несколько систем. Например, фитнес-браслет тоже использует механическую составляющую: электронная энергия преобразуется в механическую энергию вибрации, и браслет дает вам знать, что вы засиделись.

Очевидное-невероятное: почему чат-бот, квадрокоптер и фитнес-браслет тоже роботы
Любые устройства и программы могут считаться роботами при условии, что они делают что-то осязаемое и соответствуют другим признакам роботов. Давайте разберем это утверждение на нескольких примерах из современной жизни.

Чат-бот не робот, а обычная программа, если он:
получает от вас вопрос, ищет ответ в поисковике и выдает его вам — это всего лишь программа, связанная с другими программами, он действует в виртуальном мире.
Чат-бот — это софтверный робот, если он:
Беспилотный дрон — это классический робот: у него есть цель, система датчиков, алгоритм, управляющие устройства — система стабилизации, двигатели и т. д.

Квадрокоптер — это радиоуправляемый робот. Хотя направление движения ему задает человек (оператор) с земли, устройство само стабилизирует свое положение в пространстве, а потому может считаться роботом.

Фитнес-браслет тоже робот. Он призван заменить нам тренера в простейших ситуациях и автоматизировать записи о физической активности, то есть у него есть цель. Он определяет движение, уровень нагрузок или состояние сна за счет встроенной системы датчиков, работает по алгоритму и оказывает прямое воздействие на окружающую среду (например, вибрирует, напоминая человеку, что тот долго сидит — пора бы встать и немного размяться).

Роботы повсюду: где они встречаются в городе и дома
Мы уже говорили о том, что под влиянием научной фантастики люди считают роботами только те устройства, что похожи на людей или животных. Но мы-то с вами знаем, что роботом можно назвать любое устройство или программу, которые имеют цель, алгоритм и связаны с внешним миром через датчики и исполняющие устройства. Такие роботы давно и прочно вошли в наш обиход — и люди сталкиваются с ними каждый день, сами того не замечая.
Роботы у нас дома

1. Стиральная машина:
Стиральная машина получает указания, запускает нужную программу, а затем с помощью датчиков следит за температурой и уровнем воды. В конце она сама разблокирует дверцу и подает сигнал об окончании стирки.
2. Система управления «умным домом» (на столе):
Системы голосового управления начинают входить в нашу жизнь. Так, свыше 30 млн человек в России пользуются голосовыми помощниками на мобильных устройствах и дома. Такие роботы бывают исключительно софтверным (как Siri компании Apple или Алиса компании «Яндекс»), а могут выпускаться и в виде устройств-колонок — Amazon Echo, Google Home, «Яндекс.Станция». Они оборудованы системой распознавания голоса и реагируют на внешний мир включением и выполнением команд, заданных программой.
3. Робот-пылесос:
Робот-пылесос может убирать по расписанию и в заданном режиме, а может включаться по требованию и убирать все пространство или отдельную зону. Датчики позволяют ему не застрять под мебелью, а в случае внештатной ситуации робот подаст звуковой сигнал. Одна только компания iRobot, известная роботом-пылесосом Roomba, продала по всему миру более 20 миллионов своих устройств — и это не единственный производитель.
4. Термометр на стене:
«Умный дом» — частный случай софтверных роботов. Климат-контроль в помещении может запускать определенные режимы по таймеру или в соответствии с показаниями датчиков. Когда на улице темнеет или светает, система сама регулирует освещение. «Умный дом» получает информацию извне через систему датчиков, а выполняет свои функции по заданным алгоритмам через электропроводку, динамики, включение или выключение дополнительных устройств и другие элементы
5. Датчик на двери в соседнюю комнату:
Датчики — важная часть системы «умного дома». Они умеют извлекать из окружающей среды самую разную информацию, а система, обработав эту информацию, совершает заданное действие. Например, датчик движения на двери реагирует на ее открытие или закрытие и посылает сигнал на микроконтроллер, который зажигает в комнате свет.
Конечно, на картинке представлены далеко не все роботы, которые способны помогать в быту. У того же робота-пылесоса есть младший брат — небольшой вакуумный пылесос, который ползает по столу и собирает крошки. Есть и двоюродный брат — вакуумный мойщик окон.
Читайте также: