
Что такое планшет на судне
Обновлено: 07.07.2024
Водный транспорт, теория и практика, все о морских и речных судах
20.05.2015 21:45
дата обновления страницы
Метод графической прокладки
Графическая прокладка дает более точную информацию о ситуации судов и выполняется на маневренном планшете М-78 (рис 212)
Задача на расхождение состоит из: 1) нанесения начальной ситуации на планшет и построения треугольников скоростей векторов относительной скорости;
2) оценки ситуации опасного сближения (столкновения) с судами, эхо-сигналы которых наблюдаются на экране РЛС, путем расчета времени кратчайшего сближения /кр, пересечения /"ер, дистанции кратчайшего сближения DKр и выявления их реальной и потенциальной опасностей;
3) выбора и обоснования маневра, выделения судов, с которыми необходимо расходиться;
4) расчета выбранного маневра с помощью графического перестроения векторных треугольников начальной ситуации;
5) расчета момента начала маневра (с учетом маневренных элементов
судна), выбирается упрежденное время (3 или 6 мин), дистанция расхождения, время расхождения и дистанция отхода от своего первоначального курса за время маневрирования;
6) нанесение ожидаемой линии относительного движения (ОЛОД) и последующий контроль за перемещением судна-цели (наблюдаемого судна).
Рассмотрим подробно процесс решения задачи на расхождение с помощью графической (радиолокационной) прокладки на маневренном планшете.
1. Для удобства расчетов интервал времени принимает 3 или 6 мин, т е. 1/20 или 1/10 ч.
2. Строим на планшете из его центра вектор курса и скорости VL нашего судна.
Рис. 212 Маневренный планшет
Рис. 213. Решение задачи на расхождение с помощью графической прокладки
Рис 214 Определение потенциальной опасности и местоположения судна, для расхождения с которым требуется произвести расчет маневра
3. С появлением на экране РЛС эхо-сигналов определяем их пеленги и дистанции и наносим на планшет.
4. Через равные интервалы времени (3 или 6 мин) в прежней последовательности наносим следующие точки и после их соединения получим векторы относительной скорости.
5. При этих векторах строим векторные треугольники, для чего Vc своего судна из центра планшета переносим в первую точку L Соединив начало своего вектора Vc со второй точкой 2, получим вектор скорости наблюдаемого судна W
6. Линию, соединяющую точки 1 и 2, продлим за центр планшета, получим ЛОД.
Оценка ситуации заключается в определении степени опасности столкновения судов. Находим кратчайшее расстояние DKp, опуская перпендикуляр из центра планшета до ЛОД и точку пересечения курса судна-цели Dnep, для чего проводим из центра планшета линию, параллельную вектору скорости У" суд-на-цели до пересечения с ЛОД
Выявление потенциальной скорости судов можно осуществить двумя способами:
1) проигрываем маневр нашего судна (Vc) или судна-цели (V") и определяем по изменению ЛОД и Vo возможный переход из потенциальной опасности в реальную. Изменение курса, скорости или комбинированный маневр нашего судна вправо ухудшает ситуацию с судном "б". В данном случае маневр необходим с судном "б" (рис. 214);
2) использованием особенностей перемещения эхо-сигналов в относительном движении на экране РЛС, что было подробно разобрано при визуальном методе оценки ситуации.
Для выбора и обоснования вида маневра проигрывают все возможные его варианты: изменение курса, скорости или того и другого одновременно При этом учитываются все факторы, сопутствующие плаванию в условиях ограниченной видимости, навигационных особенностей района плавания, МППСС-72 и маневренных возможностей своего судна и возможного маневра судна-цели. Судоводитель должен стремиться к безопасному расхождению приемлемым вариантом Расчет маневра можно производить при помощи палетки и линейки. Он сводит к минимуму графическую работу по одному-двум судам. На рис. 215 выполнен расчет маневра для безопасного расхождения изменением своего курса вправо. Положение упрежденных точек не оказывает влияния на методику расчета с использованием векторных треугольников начальной ситуации. Следует всегда помнить, что момент упрежденной точки есть условный момент окончания маневра.
Момент начала маневра своего судна рассчитывается с учетом маневренных элементов судна (инерция, торможения, поворотливость и т. д.).
Рис. 215 Расчет маневра для расхождения изменением курса вправо; расчет выполнен с судном "б"
В векторном треугольнике судна "а" вектор нашей скорости поворачиваем вправо на рассчитанный угол. Получаем новый вектор относительной скорости Vo и соединяем точку _2 с концом повернутого вектора Vq. Параллельно вектору относительной скорости V'o из упрежденной точки проводим ОЛОД судна "а". Упрежденная точка берется за один и тот же интервал времени. После этого можно определить время расхождения судов tpicx и дистанцию отхода D0тх от курса нашего судна (см. рис. 215).
Для расчета используем новый вектор относительной скорости W Дистанция отхода рассчитывается на планшете. Для этого на линии нашего нового курса, проложенного из центра планшета, откладываем расстояние, которое пройдет наше судно за время расхождения. Затем из полученной точки опускаем перпендикуляр на линию первоначального курса. Отрезок этого перпендикуляра будет дистанцией отхода от курса в масштабе планшета.
Результат маневрирования контролируется с помощью ОЛОД. На планшет наносится не только ОЛОД судна, относительно которого рассчитан маневр, но и других судов, которые представляют потенциальную опасность. Эти линии ожидаемого относительного движения проводятся для контроля за развивающейся ситуацией после маневра, чтобы своевременно обнаружить маневр других судов, а также в случае допущенных ошибок в расчетах и графических построениях.
Из вышеизложенного видим, что оба метода взаимосвязаны и дополняют друг друга, обеспечивают решение задач на безопасное расхождение судов с помощью РЛС в условиях ограниченной видимости.
На некоторых судах над экраном РЛС установлен зеркальный планшет. Это вспомогательное устройство, являющееся беспаралаксной оптической системой. Преимущество зеркального планшета в том, что он дает возможность вести графическую прокладку, не прерывая наблюдения на экране РЛС.
Периодически повышая квалификацию, судоводители морского флота проходят тренировочные учения по решению задач на радиолокационных тренажерах.

Средства для чистки катеров

Чистка ультразвуком

Чистка ультразвуком

Чистка инжектора, форсунок

Очистка инжектора, форсунок

Тестирование форсунок

Промывка форсунок

Очистители деталей, УЗО

Очистка меди и бронзы
Чем меньше Дкр, тем более опасной является приближающаяся цель. Но нельзя оценивать степень опасности только по дистанции
кратчайшего сближения. Не менее важными факторами являются скорость сближения и запас времени, которым располагает судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так ситуация обгона, как правило, менее опасна чем расхождение на встречных (пересекающихся) курсах, даже если Дкр в первом случае меньше, чем во втором.
Построение треугольника скоростей
Суть относительной прокладки заключается в том, что за центр системы координат мы принимаем наше судно, которое помещаем в центр планшета, а цели наносим на планшет в соответствующие точки по пеленгу и дистанции, измеренных при помощи РЛС.
Пошаговые действия для оценки ситуации:

Построение треугольника скоростей
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна Vн при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор Vн2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.
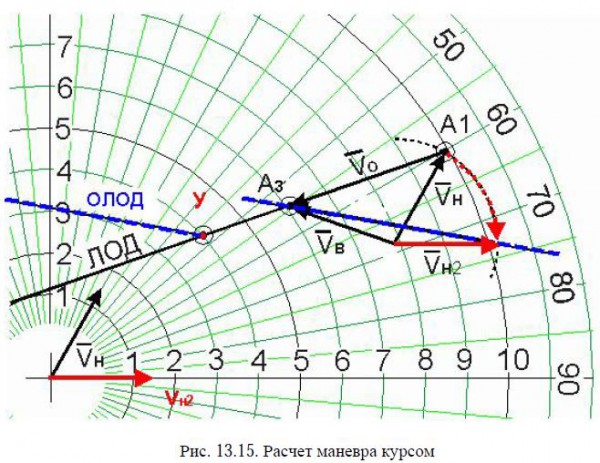
Расчет маневра курсом
Маневр расхождения скоростью
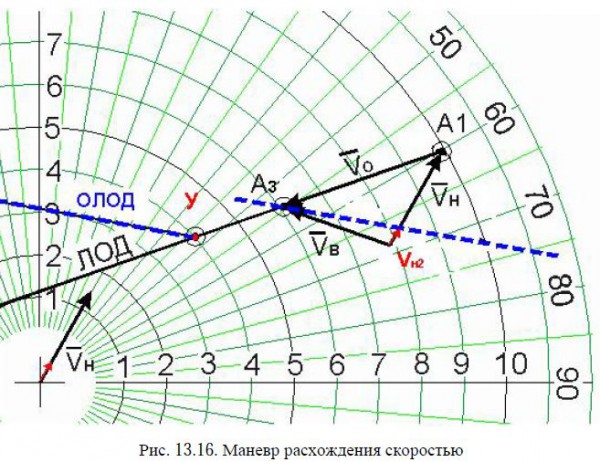
Маневр расхождения скоростью
Маневр расхождения скоростью применим для судов водоизмещением до 20000 тонн. В любом случае, при выполнении маневра расхождения необходимо учитывать маневренные характеристики судна.
При выборе маневра расхождения с опасной целью, когда на экране наблюдаются эхо-сигналы других судов, необходимо учитывать те из них, ситуация сближения с которыми может ухудшиться в результате выбранного маневра. Такие опасные суда определяются глазомерно по направлению разворота ЛОД при предполагаемом маневре. Особенность радиолокационной прокладки в этом случае заключается в необходимости одновременного ее ведения для всех потенциально опасных судов. Как правило, на планшет наносится полный анализ ситуации до момента окончания маневра и возвращения к исходным параметрам движения вашего судна.

Ага и башку изолентой синей обмотай и навигатор тебе ненадо!

Ты что больной! Как это ху*ня может заменить эхолот?! Что я сейчас посмотрел за бред! Объясни как ты рыбу найдешь)) Прочесывая все треки- ахахахахаха, так я и так ее найду без этой говно программы! А если ты идешь на моторе я уверен на 1000% что она будет отставать от твоего места положения и ты будешь тупить почему я прошел поворот, а она показывает что я не дошел до него, так-же рельеф дна меняется постоянно и пойдя хотя-бы тролленгом ты хрен увидеш свежую корягу и пока снасти))) Короче скачать себе еще яндекс карты- и покажи что телефонный GPS заменит туристический гармин))) Тоже поржу!

По части качества навигации смартфоны уже ушли далеко вперед всяких туристических гарминов. Не так давно купил себе локус мапс на андройд и он работает просто изумительно. В устройстве чип дуал gps точность до 1м. Можно переключаться между 10 разными картами даже историческими, кто копом занимается например функция незаменима. Режимы наложения также присутствуют. Работает интерфейс мгновенно. То же самое можно сказать и про навигацию по воде. Карты навионикс и планшет решают. От брызг и воды в целом есть специальные корпусы. Короче надо идти в ногу со временем. Но к вопросу о поиске рыбы это не имеет отношения, тут эхолот мастхэв.
Сразу видно ты дальше Москвы не выезжал))) Прокатись ка в сторону Дальнего Востока и по тайге со смартфоном ))) Я посмотрю на тебя умника когда сперва пропадет на нем интернет, через 100 метров связь, через еще 100 и твой GPS))) А через час в поисках спутника у тебя сядет сперва батарея т.к. твой недосмартфон будет пытаться хоть что-то найти но кроме ели он ничего не найдет)) Как-то так дружок — проверенно и не раз, и установка какого-то МАПС вообще ничего не решит. А в доказательства что твоя идея как минимум глупа — ЗАЧЕМ СТАВИТЬ НА КОРАБЛИ НАВИГАЦИЮ ЗА МИЛЛИОНЫ ЕСЛИ МОЖНО ХОДИТЬ ПО ТЕЛЕФОНУ ИЛИ СМАРТФОНУ))) Зачем люди покупают эхолот? Правильно чтоб рыбу искать и дно изучать, а не смотреть кто и где ходил))
За миллионы это не навигация, а комплекс управления судном: автопилоты, погодные станции, система предотвращения столкновений и иные датчики. Все давно пользуются планшетами и смартфонами даже в профессиональной сфере потому что это дешево и функционально, конечно только как дублирующими устройствами. А вообще ещё лет 5 назад даже в авиасфере началось распространение айпадов среди пилотов, а там оборудование стоит не один миллион и не два. Короче дешевый понт на тему нежиснеспособности смартфонов давно уже неактуален. Кто-то может не умеет задницу свою потирать, но это не значит что надо ходить с грязной жопой. Гпс в лесу не пропадёт это спутниковая технология, если что, просто телефоны надо покупать нормальные. Проблема только в более высоком энергопотреблении, но это решается дублированием любым недорогим туристическим навигатором типа гармина. Или если поход до недели то любым пауэрбанком. Кстати новое поколение туристических навигаторов уже начинает быть больше похожим на сматрфоны. С них уже и звонить можно и писать из любой точки планеты.
Дык, подкрепи свои слова фактами, а то на высер похожи)))
Гугл в помощь. Много инфы на иностранном есть, если осилишь.
гугл для тебя придумали ты там и ищи, так без гугла знают все моряки и могут подтвердить мои слова что на каждом судне стоят примитивные компаса магнитный, гироскоп. Ну так умник ответь зачем на судне такое старье))) если есть планшет, повер банк и т.д.))) А ведь это тоже навигация))) Да и про компаса есть на русском чтоб ты себя не утруждал))
Я тебе про Фому, ты мне про Ерёму. Ходи по примитивным компасам магнитным и гироскопу))) Может до Москвы и доплывёшь))
Примитивным магнитным компасом и гироскопом моряки обойдут все океаны и моря, а вот карты навионикс и планшет в море вообще ни о чем, в море, на земле и в воздухе есть только проверенные системы как эхолот разных модификаций, навигационная система через глонасс ( Россия ), GPS ( Америка ), и ни какие карты, шмарты не заменят эти системы так как вся информация идет от них, а если информацию для карт и прочей дерьмо-программ берут от устаревших систем то уровень новой программы ставиться под сомнение)) А твои беспонтовые недодоводы типа " Гугл в помощь. Много инфы на иностранном есть, если осилишь" это отмазка нищего и убогого т.к. человек подкрепит свои слова доп. информацией, а так это твой беспонтовый высер))) Давай дохай)))
Не убедил, давай факты, иначе попахивает сам знаешь чем. Тем словом, которое в твоей речи чаще всего встречается))
Как определить свое положение в море? А как это делали мореплаватели до нашей эры и в эпоху колонизации?

Тем не менее задолго до прихода эры навигации и изобретения компьютеров первые мореплаватели — викинги и полинезийцы — отправлялись в далекие путешествия, во время которых совершили множество открытий. Да и Колумб открыл Америку без компьютеров. Как же им удавалось найти путь в океане?
Древнее древнего: как первые мореходы находили дорогу?
Полинезийцы были прекрасными навигаторами. За сотни лет до того, как Христофор Колумб пересек Атлантику, они уже бороздили Тихий океан на своих деревянных каноэ, преодолевая расстояния в тысячи километров между островами Полинезийского треугольника. Солнце, звезды, луна, ветры и течения — вот все, что полинезийцы использовали в качестве ориентиров. Еще они создавали своеобразные карты из палочек и ракушек.
Викинги также преодолевали тысячи километров, путешествуя межу Северной Европой, Британскими островами, Исландией, Гренландией и даже Северной Америкой. Помогали им в этом расчеты и необыкновенная наблюдательность. Древние мореходы плыли по течению, следили за китами, брали на борт специально обученных воронов, чтобы те летали на разведку и подсказывали, в какой стороне берег.
По разным версиям, они определяли свое местоположение в океане с помощью солнечных часов, вели учет дням, проведенным в море, примерно рассчитывали скорость корабля, ориентировались по солнцу и звездам. Предположительно викинги даже использовали поляризацию света, чтобы найти дорогу в плохую погоду, когда не видно ни солнца, ни звезд. Во многом все их способы были интуитивными и неточными. В легендах викингов часто говорится о походах, во время которых мореходы терялись в море из-за плохой погоды, отсутствия ветра и туманов.
Битва за долготу
Первые представления о координатах, по крайней мере те, о которых известно сейчас, появились в Древней Греции за 200 лет до нашей эры. Полвека спустя, в 90–160 годах нашей эры, Клавдий Птолемей первым предложил математически точную концепцию географической широты и долготы.

С помощью координат и подробной карты земли и неба моряки могли приблизительно определить свое местоположение. Однако вычислить свои координаты было непросто. Если широту еще можно было найти по солнцу, луне и звездам (и то приблизительно), то с долготой дела обстояли значительно сложнее.
Определить долготу можно лишь как разницу между временем в точке, где вы находитесь, и временем в некой референсной точке в тот же момент. Проблема состояла в том, чтобы, во-первых, как-то узнать точное местное время, а во-вторых, точно знать время в другой фиксированной точке (например, в пункте отправления или на Гринвичском меридиане). Точность измерений была критическим фактором: на экваторе отклонение в один градус долготы равно 109,5 километра, или 68 милям.
Время на борту судна можно было вычислить по солнцу и звездам, но задача определения времени в порту отправления долго казалась трудноразрешимой. Эта проблема стояла так остро, что Людовик XVI однажды заявил, будто из-за плохой работы астрономов Франция потеряла больше земель, чем из-за неудачных военных кампаний.
В XVI–XVIII веках Испания, Голландия, Португалия, Венеция и Англия — все ведущие морские державы — предлагали огромные премии за разработку метода надежного определения долготы. Приз Англии в XVIII веке составлял 20 тысяч фунтов стерлингов — целое состояние. Большую часть награды в итоге получил изобретатель хронометра — лондонский часовщик Джон Гаррисон, творение которого поступило на службу мореходам в 1760 году.

Чуть раньше, в 1757 году, человечество получило секстант (над ним одновременно работали несколько ученых: Исаак Ньютон, Джон Хэдли, Томас Годфри и другие), и вместе с хронометром он позволил решить проблему определения долготы.
Как работали эти два инструмента? Штурман измерял высоту солнца над горизонтом с помощью секстанта, чтобы вычислить точное местное время, и сравнивал его со временем по Гринвичу, которое показывал хронометр. Так определялась долгота — то, насколько западнее или восточнее относительно нулевого меридиана находится судно.
А что сегодня?
Сейчас все больше судов полагаются исключительно на электронную картографическую навигационную систему (ECDIS) и систему глобального позиционирования (GPS).
GPS использует сеть более чем из 30 спутников, чтобы помочь нам с вами определить наше точное местоположение. Изначально систему GPS разрабатывали для военных целей, но теперь ею пользуются практически все: от моряков и пилотов самолетов до туристов.
Также суда массово переходят на электронные карты, которые значительно облегчают прокладку и корректировку курса. Электронная картография позволяет тратить минуты на операции, которые раньше требовали нескольких часов. Например, внесение поправок курса вручную — это долгое и кропотливое дело. В ECDIS все проще — нужно лишь загрузить с носителя нужный раздел, ввести необходимые поправки и проложить курс.
В результате офицер на вахте может уделить максимум времени наблюдению за окружающей обстановкой (погодой, скоростью хода судна и другими вещами) и принять верные решения. Автоматизация работы штурмана делает судоходство безопаснее, а это один из важнейших факторов для судовладельцев, заказчиков, доверяющих им свои грузы, и страховых компаний, рассчитывающих ставки по страховке.
Как и в авиации, в морской индустрии навигационная система ECDIS должна дублироваться. Если судно хочет полностью отказаться от бумажных карт и перейти на электронные, то на нем должно быть установлено минимум два независимых друг от друга ECDIS-компьютера, каждый с отдельным дисплеем и своей базой данных.
Что будет, если вдруг все сломается?
Существует вероятность, что обе системы ECDIS откажут: из-за программных ошибок или направленной атаки хакера. Кроме того, любой компьютерной системе приходится делать перерыв в работе, чтобы установить обновления. Периодически исследователи обнаруживают уязвимости в критически важных для судоходства технологиях: GPS, ECDIS, AIS (системе автоматической идентификации). Их латают, но появляются новые.
Сбой навигационных систем где-нибудь в проливе или у берега не так страшен, так как необходимые ориентиры видны невооруженным глазом, к тому же у моряков работают Интернет и мобильная связь. Случись такое на небезопасном участке, судно может связаться с ответственным лицом на берегу и получить от него карту в формате PDF, на которой будут указаны все мели, течения и другие опасности. А вот если такое случится вдали от берегов, то команде придется несладко.
Система GPS тоже несовершенна. Спутники страдают от вспышек электромагнитного излучения, вызванных солнечной активностью. Кроме того, злоумышленники (скажем, пираты или террористы) могут заблокировать сигнал простым устройством, которое можно довольно дешево приобрести в Интернете.
Направленная атака на GPS легко может сбить судно с пути, а все приборы при этом будут показывать верный курс. В лучшем случае такое событие приведет к задержкам, в худшем — к столкновениям или посадке на мель. Чтобы избежать подобных ситуаций, в мореходных академиях США курсантов учат определять местонахождение судна не только по GPS, но и по солнцу и звездам.
Потеря связи со спутником или блокировка GPS посреди океана — это, пожалуй, самая очевидная угроза, которая способна заставить современных штурманов освежить навыки классической астронавигации.
Современному судну с рабочими двигателем и электрогенератором сложно потеряться в океане. Два года назад произошел случай, который доказывает, что человечество далеко продвинулось в искусстве мореходства и навигации в последние несколько сотен лет.
В 2014 году американский энтузиаст Реза Балучи попытался добежать от Флориды до Бермуд в гидропоне (гидропон — это такое надувное плавсредство, похожее на беговое колесо для мелких грызунов; оно приводится в движение бегущим внутри него человеком), попал в Гольфстрим и сбился с пути. В результате бедняга три дня скитался по морю и был вынужден притормозить проходящий мимо катер, чтобы спросить дорогу до Бермудских островов.
Читайте также: