
Gm lan что это
Обновлено: 04.07.2024
Эквивалентные местные инструменты см. Специальный инструмент .
Соединители DuraSeal обладают 2 важнейшими особенностями:
Локальная сеть GM (GMLAN) требует специальных процедур по ремонту проводки из-за чувствительности системы к схематике. При работе с разъемами и контактами GMLAN придерживайтесь специальных процедур и инструкций.
Ремонт GMLAN
Примечание: После выполнения ремонтных работ на любой сети GMLAN длина провода после ремонта должна быть такой же, как и до него. Если сеть создана на основе витой пары, то после ремонта провода должны быть скручены.
GMLAN бывают 2 типов: низкой и высокой скорости. Низкоскоростная GMLAN имеет единственный провод и работает с небольшой скоростью. Высокоскоростная GMLAN имеет два провода в витой паре и работает с большей скоростью. Дополнительную информацию по GMLAN см. Описание и функционирование каналов обмена данными .
Ремонта контактов разъема GMLAN
Примечание: Для ремонта поврежденных клемм разъема, как высоко, так и низкоскоростной GMLAN, можно использовать заделанный контакт. При ремонте разъема высокоскоростной системы GMLAN с витой парой не расплетайте провод более чем необходимо для ремонта.
Если в разъеме GMLAN повреждены только некоторые клеммы, то используйте соответствующую процедуру ремонта разъема. Подходящие процедуры ремонта см. Ремонт разъемов .
Ремонт провода GMLAN
Примечание: Чтобы определить правильный размер провода для ремонтируемой цепи, см. раздел "Ремонт проводки", информация по обслуживанию, виды торцов разъемов и схемы автомобиля. Для сохранения целостности цепи следует пользоваться этой информацией.
В случае повреждения какого-либо провода, за исключением гибкого присоединительного вывода, отремонтируйте этот провод методом сращивания, заменив участок провода на новый, имеющий такой же диаметр проводника (0,5 мм, 0,8 мм, 1,0 мм и т.д.). Использовать втулки DuraSeal для сращивания проводов и инструмент EL-38125-10. О ремонте проводки см. Сращивание медного провода с помощью обжимных соединителей .
Примечание: Ниже представлено общее описание различных шин последовательной передачи даных, используемых модулями управления GM для обмена информацией друг с другом. В Схемы обмена данными содержится информация о том, какие шины последовательной передачи даных сконфигурированы для конкретного автомобиля.
Описание цепи
В автомобиле имеется множество компонентов, использующих информацию от других источников, передающих информацию другим источникам, или выполняющих и то, и другое. Сети последовательной передачи данных обеспечивают надежный и недорогой способ "общения" различных компонентов автомобиля между собой и совместного использования информации.
Компания GM использует ряд различных шин связи для обеспечения своевременного и эффективного обмена информацией между модулями управления. Сравнивая эти шины друг с другом, можно отметить, что некоторые из них отличаются с точки зрения скорости, характеристик сигнала и режима работы. Примерами таких шин являются высокоскоростная шина GMLAN и низкоскоростная шина GMLAN.
Описание цепи высокоскоростной сети GMLAN
Высокоскоростная шина GMLAN используется в тех случаях, когда обмен данными должен происходить на достаточно высокой скорости, чтобы минимизировать запаздывание между моментом изменения показания датчика и получением этой информации управляющим устройством, использующим информацию для коррекции режима работы системы автомобиля.
Высокоскоростная сеть последовательной передачи данных GMLAN состоит из двух скрученных проводов. Одна сигнальная цепь обозначается как "GMLAN-High" ("GMLAN-Высокий уровень"), а другая сигнальная цепь обозначается как "GMLAN-Low" ("GMLAN-Низкий уровень"). На каждом конце шины данных между цепями GMLAN-High и GMLAN-Low имеется согласующий резистор 120 Ом.
Символы данных (единицы и нули) передаются последовательно со скоростью 500 Кбит/с. Данные, передаваемые по шине, представлены в виде разности напряжений между напряжением сигнала GMLAN-High и напряжением сигнала GMLAN-Low.
Когда двухпроводная шина бездействует, сигнальные цепи GMLAN-High и GMLAN-Low не активны, и это состояние соответствует логической "1". В таком состоянии обе сигнальные цепи имеют одинаковое напряжение 2,5 В. Разность напряжений составляет приблизительно 0 В.
Если требуется передать логический "0", сигнальная цепь GMLAN-High возбуждается до более высокого напряжения около 3,5 В, а цепь GMLAN-Low возбуждается до более низкого напряжения около 1,5 В. Разность напряжений становится равной приблизительно 2,0 (+/- 0,5) В.
Описание шасси цепи высокоскоростной сети GMLAN
Описание цепи графического интерфейса шины CAN (CGI)
В том случае, когда модуль информационного дисплея и модуль управления радиоприемником/кондиционером являются разными модулями управления, модуль информационного дисплея отвечает за передачу информации между радиоприемником и модулем управления радиоприемником/кондиционером. Панель управления радио обменивается данными только с модулем информационного дисплея, а модуль информационного дисплея затем обменивается данными с панелью управления радио/кондиционером через интерфейс локальной сети связи (LIN).
Когда требуется задействовать систему, сигнал вывода шины из спящего режима генерируется модулем радио или модулем информационного дисплея. Функция обмена данными графического интерфейса CAN включается или отключается в зависимости от уровня напряжения сигнала активизации интегрированной центральной консоли. Сеть будет оставаться активной, пока напряжение цепи поддерживается на низком уровне - не выше 1,5 В. Обмен данными будет запрещен при высоком напряжении цепи порядка 5,0 В.
Модуль радио может осуществлять горячий сброс модуля информационного дисплея, если модуль информационного дисплея не отвечает на запросы модуля радио. Сигнал сброса интегрированной центральной консоли – это выходной сигнал низкого уровня (менее 1,5 В), направляемый модулем радио модулю информационного дисплея, который имеет те же электрические характеристики, что и описанный выше сигнал активизации интегрированной центральной консоли.
Описание цепи среднескоростной сети GMLAN
Среднескоростная шина GMLAN очень сходна с высокоскоростной шиной GMLAN, но использует более медленную скорость передачи данных, равную 125 Кбит/с. Эта шина предназначена для использования в тех случаях, когда время реакции системы требует передачи большого объема данных за относительно короткое время - например при обновлении информации на графическом дисплее. Поэтому она обычно используется в информационно-развлекательных системах. Иногда требуется установить связь между низкоскоростной шиной GMLAN и среднескоростной шиной GMLAN. Это обеспечивается за счет использования радиомодуля (SilverBox) в качестве модуля-шлюза. Поскольку среднескоростная шина GMLAN и основная высокоскоростная шина GMLAN функционируют одинаково, методы их диагностики также аналогичны.
Описание цепи среднескоростной сети GMLAN
Низкоскоростная шина GMLAN применяется в тех случаях, когда не требуется высокой скорости передачи данных, что позволяет использовать менее сложные компоненты. Обычно она используется в функциях, управляемых оператором, когда требования ко времени реакции не такие жесткие, как при динамическом управлении автомобилем.
Низкоскоростная сеть последовательной передачи данных GMLAN состоит из единственного провода - шины, имеющей привязку к массе, с управляющим напряжением высокого уровня. Во время движения автомобиля по дороге символы данных (единицы и нули) передаются последовательно со стандартной скоростью 33,3 Кбит/с. Исключительно для целей программирования может использоваться специальный режим высокоскоростной передачи данных на скорости 83,3 Кбит/с.
В отличие от высокоскоростных двухпроводных сетей в однопроводной низкоскоростной сети не используются согласующие резисторы на концах сети.
Символы данных, передаваемые по шине, представляют собой сигналы различного напряжения на шине. Когда низкоскоростная шина GMLAN бездействует и не возбуждается, присутствует низкое сигнальное напряжение порядка 0,2 В. Такое состояние соответствует логической "1". Если требуется передать логический "0", сигнальное напряжение возбуждается до более высокого уровня порядка 4,0 В или выше.
Описание цепи сети местной связи (LIN)
Шина локальной сети связи (LIN) состоит из единственного провода и имеет скорость передачи 10,417 Кбит/с. Эта шина используется для обмена данными между главным модулем управления и другими интеллектуальными устройствами, выполняющими вспомогательные функции. Конфигурация такого типа не требует производительности или скорости высокоскоростной шины GMLAN или низкоскоростной шины GMLAN, и поэтому является относительно более простой.
Передаваемые символы данных (единицы и нули) представлены различными уровнями напряжения на шине связи. Когда шина LIN бездействует и не возбуждается, сигнал представляет собой напряжение высокого уровня, приблизительно равное напряжению аккумуляторной батареи Vакк. Такое состояние соответствует логической "1". Если требуется передать логический "0", сигнальное напряжение снижается почти до уровня массы (0,0 В).
Описание цепи активизации связи
Модули управления, присоединенные к сетям типа высокоскоростное сети GMLAN, за исключением среднескоростной шины GMLAN и шины графического интерфейса CAN, разрешают или запрещают передачу данных в зависимости от уровня напряжения в этой цепи. Если напряжение цепи имеет высокий уровень (около 12 В), передача данных разрешается. Если напряжение цепи имеет низкий уровень, передача данных запрещается.
Шина графического интерфейса CAN аналогичны, но в ней используются другие уровни напряжения. Описание шины графического интерфейса CAN см. выше.
Диагностический разъем (DLC)
Разъем передачи данных (DLC) является стандартизованным разъемом с 16 полостями. Конструкция и положение разъема соответствуют общим стандартам промышленности и обеспечивают следующее:

Цель этой статьи — рассказать о моём опыте модификации автомобиля и экспериментах с шиной CAN.
Сначала я решил добавить фронтальную камеру в свой 2017 Chevrolet Cruze. Поскольку у автомобиля уже есть заводская камера заднего вида, то на высоком уровне нужно было выяснить две вещи:
- Способ передачи видео с фронтальной камеры, которую я добавлю.
- Способ отображения на экране картинки с камеры заднего вида в любое время.
Запуск на экране оказался более сложным, и после некоторого расследования я пришёл к выводу, что машина должна подавать сигнал от камеры заднего вида на экран через какую-то шину данных.
У Chevrolet две разные шины данных. Первая — это стандартная CAN, быстрая (500 Кбит/с) и надёжная, она используется для критических данных. Вторая — то, что GM называет LAN (GMLAN), более старая и медленная шина (33,3 Кбит/с), которая используется для данных, не связанных с безопасностью.
Мне нужен был способ прослушивать трафик по CAN, то есть снифер. Для этой цели невероятно полезно устройство PCAN.

Peak Can
Поскольку камера заднего вида менее важна для безопасности, чем другие компоненты, я предположил, что искомые данные, скорее всего, будут на шине GMLAN.
Самая простая точка доступа — разъём OBD2. Я подключил Peak Can к шине GMLAN, запустил программное обеспечение — и сразу началось прослушивание трафика.
Впрочем, я не планировал постоянно ездить с ноутбуком. Нужен был способ автоматизировать эти функции — и здесь пригодилась Arduino. Возможность напрямую получать питание 12V в сочетании с большим количеством ресурсов и поддержки в интернете сделала этот выбор очевидным.
В дополнение к Arduino для завершения проекта мне понадобилось два компонента: модуль CAN и модуль реле. По сути, Arduino — это мозг, запускающий и выполняющий код. Модуль CAN предоставляет возможность взаимодействовать с шиной данных, а реле обеспечивает питание фронтальной камеры, а также действует как видеомикшер между ней и камерой заднего вида.

Модуль mcp2515 (сверху), Arduino Uno (посередине), модуль реле (снизу)
После добавления и настройки соответствующих библиотек Arduino установил связь с автомобилем.
Прослушивание трафика через Arduino
Поскольку я уже знал, что могу запустить дисплей, то начал думать о том, КАК это сделать. Первоначальная идея состояла в том, чтобы установить на панели специальную кнопку мгновенного вызова, но я начал думать: «А что ЕЩЁ в сети можно использовать в качестве триггера?»
Распознавание однократного нажатия кнопки
Однако я не хотел, чтобы камера активировалась каждый раз, когда я отменяю круиз-контроль, поэтому я решил, что лучший подход — превратить её (по сути) в многофункциональную кнопку. Камера активируется только в том случае, если кнопка «дважды нажата».
После долгого уикенда изучения функции millis и отладки кода я успешно запрограммировал распознавание двойного нажатия.
Распознавание двойного нажатия
И когда я привязал его к своим командам для управления дисплеем, у меня собралась довольно крутая небольшая утилита.
Двойное нажатие + команды
Теперь у меня была возможность включать и выключать дисплей, но оставалась одна проблема — что насчёт камеры заднего вида? Мне нужно было, чтобы они с фронтальной камерой работали вместе, словно их так настроили на заводе.
На блок-схеме я изобразил, как я это представляю.
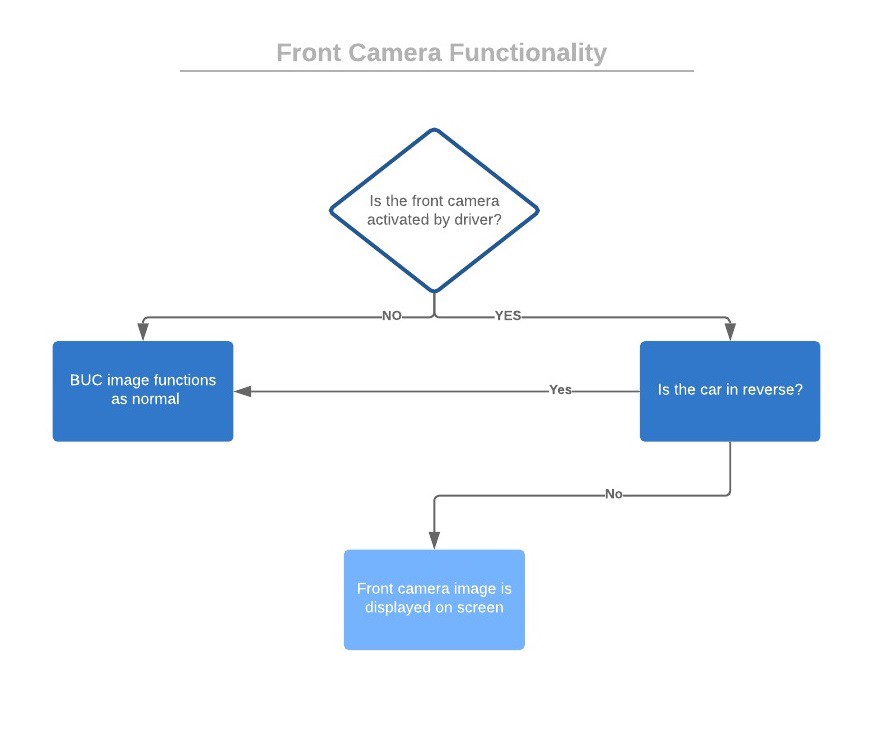
Я быстро понял, что для такой системы нужно в любой момент времени знать состояние трёх переменных:
- Модуль передней камеры: водитель включил или выключил его?
- Дисплей камеры: изображение на дисплее включено или выключено?
- Задний ход: автомобиль в реверсе или нет?
В конце концов, я добился успеха!
Активный мониторинг
Теперь я смог реализовать операционную логику, которая контролирует реле.
Управление через реле
На протяжении всего процесса я всё больше узнавал об Arduino и заметил, что версия Nano способна делать всё, что нужно, при этом у неё меньший размер и более низкая цена. Она идеально подходит для постоянной установки в автомобиль. Я разработал модель и распечатал на 3D-принтере корпус для размещения компонентов в качестве компактного блока для установки.

3D корпус

Наконец настал день, когда я увидел результаты. Хотя нужно ещё повозиться с таймингом, но было приятно видеть, что модуль корректно работает.
Включение/выключение режима парковки, включение/выключение фронтальной камеры, автоматическое переключение на камеру заднего вида и автоматическое переключение обратно
В целом, этот опыт меня многому научил и открыл глаза на возможности интеграции непосредственно с шиной CAN. Довольно удивительно, чего можно достичь соединением по двум проводам.

Приборка, в принципе, самодостаточна, уже можно было бы начать изучение низкоскоростной GMLAN-шины. Но, я решил еще подключить и блок кузовного оборудования (BCM). Этот блок кроме низкоскоростной шины работает по высокоскоростной двупроводной, которая выводится на разъем диагностики на пины 6 и 14 — более того, диагностика GM MDI видит его только по этим пинам, что удалось подтвердить, когда я на скорую руку попробовал подключить блок буквально парой проводов. Да, и оказалось, что этих пары проводов недостаточно. Вот, что я в итоге подключил (выводы перечислены в виде разъем/пин):
X2/22 — GMLAN вход, идут на одну линию разъемом диагностики и приборки
X7/23 — GMLAN выход на другие блоки (не подключал, просто записал)
X2/24 — CAN-H => 6й пин на разъеме диагностики
X2/23 — CAN-L => 14й пин на разъеме диагностики
X3/5 — зажигание. Оно же потом раздаётся на пины X4/22 и X4/23, если верно понял. Можно подключить приборку сюда, чтоб включалась только вместе с BCM.
X3/6 — зажигание.
Схемы 2546283RU и 2546303RU:
X1/1 — земля
X1/2 — питание
X1/3 — питание
X1/4 — питание
X2/1 — питание
X2/2 — земля
X2/3 — питание
X2/4 — питание
X5/3 — питание
X5/4 — питание
X3/22 — выход 5V
X3/15 — земля для замыкания с 5V через 1.3кОм резистор для эмуляции наличия ключа в замке, если правильно понял
Схема 2546329RU — подключил блок управления иммобилайзером:
X3/1 — земля, 1й пин на блоке иммо
X3/2 — сигнальный, 2й пин на блоке иммо
X3/3 — питание, 3й пин на блоке иммо
X4/26 — земля
X4/20 — питание
X1/24 — GMLAN(-)
X1/25 — GMLAN(+)
X6/18 — GMLAN (+) (перемычка на X6/24)
X6/19 — GMLAN (-) (перемычка на X6/25)
X6/24 — GMLAN (+)
X6/25 — GMLAN (-)
Включаем — первое, что обнаруживаем, приборка зажигает лампочки иначе и перестала показывать пробег. Значит, связь у нее с BCM есть, но вины у них отличаются (жаль, что не от одной машины). Попутно еще стало показывать напряжение "бортовой" сети, и что датчики колес уже обучены, а не в поиске. Пробуем диагностику — ничего не видит. Еще раз все проверил, попутно заменил страшные связки резисторов для имитации кнопок на тройку подстроечных и вспомнил, что для высокоскоростной шины требуется терминирующий резистор 120 Ом — вешаем его между линиями 6 и 14 разъема диагностики. Получилась такая вот картина:

Крупным планом бредборд и "имитация кнопок":
И блок иммо — думал, что пропишу ключ или хотя бы разберусь в процедуре его считывания, но быстро разобраться пока вышло:
Читайте также: