
Это часть процессора которая осуществляет выполнение одного потока команд
Обновлено: 06.07.2024
Каждая инструкция, выполняемая процессором, последовательно проходит все блоки ядра, в каждом из которых совершается своя часть действий, необходимых для выполнения инструкции. Если приступать к обработке новой инструкции только после завершения работы над первой инструкцией, то большая часть блоков ядра процессора в каждый момент времени будет простаивать, а, следовательно, возможности процессора будут использоваться не полностью.
Для решения этой проблемы выполнение инструкций построено по принципу конвейера, то есть по мере освобождения блоков ядра, они загружаются обработкой следующей инструкции, не дожидаясь пока предыдущая инструкция выполнится полностью.
Так как процессор выполняет команды непрерывно, то, в идеале, он мог бы быть занят на 100%, при этом, чем длиннее был бы конвейер, тем больший выигрыш в производительности был бы получен. Но на практике это не так.
В инструкциях часто встречаются переходы. При этом пока команда условного перехода не будет обработана полностью, конвейер не сможет начать выполнение новой команды, так как не знает, по какому адресу она находится.
Поэтому в ядро процессора вводятся блоки предсказания условных переходов. Основная задача этих блоков – определить, когда будет совершен условный переход и какие команды будут выполнены после совершения условного перехода.
Часто обрабатываемые инструкции – взаимосвязаны, то есть одна из инструкций требует в качестве исходных данных результата выполнения другой инструкции.
Поэтому процессоры могут анализировать код на несколько инструкций вперед и, например, параллельно с первой инструкцией обработать третью инструкцию, которая никак не зависит от первых двух.
Суперскаляризация
Суперскалярность – архитектура вычислительного ядра, при которой наиболее нагруженные блоки могут входить в нескольких экземплярах.
Например: в ядре процессора блок выборки инструкций может нагружать сразу несколько блоков декодирования.
В этом случае блоки, выполняющие более сложные действия и работающие дольше, за счет параллельной обработки сразу нескольких инструкций не будут задерживать весь конвейер.
Однако параллельное выполнение инструкций возможно, только если эти инструкции – независимые.
Структурная схема ядра конвейера гипотетического процессора, построенного с использованием принципа суперскалярности, в нем в каждом ядре процессора работает несколько блоков декодирования, несколько блоков выборки данных и несколько блоков выполнения инструкций.
37.Классификация вс в зависимости от числа потоков команд и данных: окод (sisd), окмд (simd), мкод (misd), мкмд (mimd).
Архитектура ОКОД (SISD) - одиночный поток команд – одиночный поток данных.
Охватывает все однопроцессорные и одномашинные варианты схем.

Все ЭВМ классической структуры относятся к этому классу.
Здесь параллелизм вычислений обеспечивается путем совмещения выполнения операций отдельными блоками АЛУ, а так же параллельной работой устройств ввода-вывода и процессора.

Архитектура ОКМД (SIMD) - одиночный поток команд – множественный поток данных.
Предполагает создание структур векторной и матричной обработки.
Здесь системы строятся однородными, т.е. процессорные элементы, входящие в систему, идентично, и все они управляются одной и той же последовательностью команд. Однако каждый процессор обрабатывает свой поток данных.
Структуры ВС этого типа специализируются в суперЭВМ.
Архитектура МКОД (MISD) - множественный поток команд – одиночный поток данных.
Предполагает построение процессорного конвейера, в котором результаты обработки передаются от одного процессора к другому по цепочки.

Здесь конвейеры должны образовывать группы процессоров. Однако при переходе на системный уровень очень трудно выяснить подобный регулярный характер в универсальных вычислениях.

Архитектура МКМД (MIMD) - множественный поток команд – множественный поток данных.
Предполагает, что все процессоры системы работают по своим программам с собственным потоком команд. В простейшем случае они могут быть автономны и независимы.
Здесь возможно согласовывать работы ЭВМ (процессоров), когда каждый элемент делает часть общей задачи.
Подобные системы могут быть многопроцессорными и многомашинными.
Одним из важнейших устройств компьютера является центральный процессор (CPU — англ, central processing unit, что переводится как «центральное вычислительное устройство»). Именно от типа процессора и его характеристик в первую очередь зависит производительность компьютерной системы в целом.
Центральный процессор — это устройство компьютера, предназначенное для выполнения арифметических и логических операций над данными, а также координации работы всех устройств компьютера.
Современные центральные процессоры для персональных компьютеров выполняются в виде отдельных микросхем и называются микропроцессорами. В дальнейшем будем считать понятия «микропроцессор» и «процессор» равнозначными.
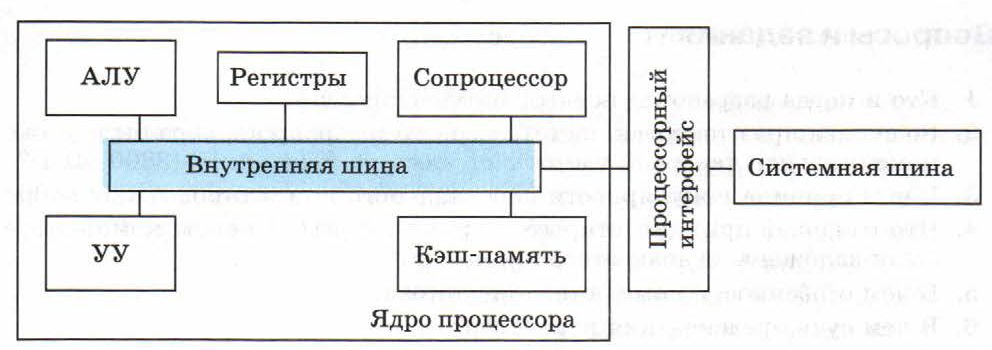
Схема состава микропроцессора показана на рисунке 1.

Основным элементом микропроцессора является ядро, от которого зависит большинство характеристик самого процессора. Ядро представляет собой часть микропроцессора, содержащую его основные функциональные блоки и осуществляющую выполнение одного потока команд.
Современные процессоры могут иметь более одного ядра, т.е. могут быть многоядерными. Многоядерные процессоры способны выполнять одновременно несколько потоков команд. Основная причина перехода к многоядерным процессорам была вызвана тем, что повышение производительности микропроцессоров путем дальнейшего наращивания тактовой частоты достигло физического предела в связи с очень высоким уровнем тепловыделения и энергопотребления. Производительность многоядерного процессора увеличивается за счет распараллеливания обработки данных между несколькими ядрами. Визуальное представление процессора показано на рисунке 2.

Ядро процессора помещается в корпус (пластмассовый или керамический) и соединяется проводками с металлическими ножками (выводами), с помощью которых процессор присоединяется к системной плате компьютера. Количество выводов и их расположение определяют тип процессорного интерфейса (разъема). Каждая системная плата ориентирована на один определенный тип разъема
Арифметико-логическое устройство (АЛУ) выполняет все математические и логические операции.
Управляющее устройство (УУ) обеспечивает выполнение процессором последовательности команд программы.
Набор регистров — ячейки памяти внутри процессора, используемые для размещения команд программы и обрабатываемых данных.
Кэш-память (кэш) — сверхбыстрая память, хранящая содержимое наиболее часто используемых ячеек оперативной памяти, а также части программы, к которым процессор обратится с наибольшей долей вероятности. Процессор в первую очередь пытается найти нужные данные именно в кэш-памяти, а если их там не оказывается, обращается к более медленной оперативной памяти. Кэш-память делится на два или три уровня, которые обозначаются LI, L2 и L3 (чаще всего уровней два).
Сопроцессор — элемент процессора, выполняющий действия над числами с плавающей запятой.
Характеристики микропроцессора Тактовая частота. Для каждой выполняемой процессором команды требуется строго определенное количество единиц времени (тактов). Тактовые импульсы формируются генератором тактовой частоты, установленным на системной плате. Чем чаще они генерируются, тем больше команд процессор выполняет за единицу времени, т. е. тем выше его быстродействие. Тактовая частота обычно выражается в мегагерцах. 1 МГц равен 1 миллиону тактов в секунду. Первые модели процессоров Intel ( i 8008 x ) работали с тактовыми частотами, меньшими 5 МГц. Сегодня тактовая частота последних процессоров превышает 3 ГГц (1 ГГц = 1000 МГц). Внутренняя архитектура процессора, как и тактовая частота, также влияет на работу процессора, поэтому два CPU с одинаковой тактовой частотой не обязательно будут тратить одинаковое время на выполнение одной команды. Если, например, микропроцессору Intel 80286 требовалось 20 тактов, чтобы выполнить команду умножения двух чисел, то Intel 80486 или старше мог выполнить это же действие за один такт. Некоторые процессоры способны выполнять более одной команды за 1 такт. Их называют суперскалярными. Различают внутреннюю и внешнюю тактовую частоту. Внешняя тактовая частота — это частота, с которой процессор обменивается данными с оперативной памятью компьютера. Как уже было сказано выше, она формируется генератором тактовых импульсов (кварцевым резонатором).
Внутренняя тактовая частота — это частота, с которой происходит работа внутри процессора. Именно это значение указывается в прайс-листах фирм, продающих процессоры.
Процессор
Одним из важнейших устройств компьютера является центральный процессор (CPU — англ. central processing unit, что переводится как «центральное вычислительное устройство»). Именно от типа процессора и его характеристик в первую очередь зависит производительность компьютерной системы в целом.
Процессор (Микропроцессор) — это центральное устройство компьютера, предназначенное для обработки данных и управления работой других устройств.
Наиболее популярные процессоры сегодня производят фирмы Intel, AMD и IBM. Большинство процессоров являются Intel-совместимыми.
Эволюция микропроцессоров
Фирма Intel со времени выпуска самого первого процессора и по сей день является одним из ведущих разработчиков микропроцессоров. Чуть позже конкуренцию Intel составила фирма AMD. В настоящее время Intel и AMD являются ведущими производителями процессоров для персональных компьютеров. Некоторое время конкуренцию им составляли также фирмы Apple Computer, IBM и Motorola, разработавшие процессор Power PC.
Важным этапом в развитии микропроцессорной техники стал процессор i80486. Он был выпущен в 1989 году. Первое новшество заключалось в том, что впервые в центральный процессор стал интегрироваться математический сопроцессор, предназначенный для выполнения арифметических вычислений с плавающей запятой. Кроме того, в этом процессоре была реализован конвейер, применяемый ранее в суперЭВМ.
В марте 1993 года был выпущен процессор Pentium, в котором впервые появляется предсказание переходов. Суть предсказания переходов заключается в том, что при выполнении команды условного перехода (например, при выполнении команды ветвления) специальный блок микропроцессора определяет наиболее вероятное направление перехода, не дожидаясь окончания анализа условия. Процессор начинает выбирать из памяти и выполнять команды по предсказанной ветви программы.
В конце 1993 года фирмы Apple Computer, IBM и Motorola совместно разработали микропроцессор Power PC. В 1994 году он стал использоваться в компьютерах Macintosh. В этом процессоре была реализована суперскалярная обработка, позволяющая выполнять в каждом такте 3 команды. Это стало возможным благодаря использованию архитектуры команд RISC (сокращенный набор команд постоянной длины). Все команды архитектуры RISC имеют одинаковую длину (что облегчает их выборку из памяти) и выполняются процессором за один такт. Все предыдущие процессоры либо использовали сложный набор команд CISC (расширенный набор команд переменной длины), либо относились к разряду CISC-процессоров с RISC-ядром. Процессорам, использующим архитектуру CISC, приходилось тратить дополнительное время на декодирование команд, так как их длина могла меняться от 8 до 108 битов.
Важным преимуществом процессоров PowerPC (начиная с моделей 603 и 604) была пониженная потребляемая мощность. В целях энергосбережения любой незагруженный исполнительный блок отключался, а при необходимости автоматически включался.
Однако в начале 2000-х годов развитие платформы PowerPC зашло в тупик. Создание новой архитектуры потребовало бы огромного количества времени и средств, поэтому в 2006 году фирма Apple решила перевести компьютеры Macintosh на процессоры Intel.
В марте 2000 года фирма AMD выпустила первый процессор с тактовой частотой, превышающей 1 ГГц, который назывался Athlon К7. Это позволило значительно укрепить позиции фирмы на рынке микропроцессорной техники.
В сентябре 2003 года AMD представила первые 64-разрядные процессоры для персональных компьютеров (Athlon 64).
Самым значимым событием 2005 года в области микропроцессоров стало появление в продаже CPU (центрального процессора) с двумя ядрами. Ядро представляет собой часть микропроцессора, содержащую его основные функциональные блоки и осуществляющую выполнение одного потока команд. О причинах перехода к многоядерным процессорам будет сказано в следующем параграфе. Первыми двухъядерными процессорами стали процессоры Pentium D фирмы Intel и Athlon64 Х2 фирмы AMD. Одними из наиболее революционных многоядерных процессоров стали процессоры линейки Core 2 Duo фирмы Intel.
В настоящее время основу рынка микропроцессоров составляют многоядерные процессоры, использующие в своем составе от 2 до 8 ядер, к каковым относятся процессоры Intel Core 2 Quad, Phenom ХЗ и Х4 (фирмы AMD) и другие.
Состав микропроцессора
Современные центральные процессоры для персональных компьютеров выполняются в виде отдельных микросхем и называются микропроцессорами. В дальнейшем будем считать понятия «микропроцессор» и «процессор» равнозначными.
Схема состава микропроцессора
Основным элементом микропроцессора является ядро, от которого зависит большинство характеристик самого процессора. Ядро представляет собой часть микропроцессора, содержащую его основные функциональные блоки и осуществляющую выполнение одного потока команд.

1. АЛУ (Арифметико-логическое устройство)
АЛУ (ALU, Arithmetic and Logic Unit) предназначено для выполнения всех арифметических и логических операций над числовой и символьной информацией.
Функционально АЛУ состоит из двух регистров, сумматора и схем управления (местного устройства управления).
Сумматор — это вычислительная схема, выполняющая процедуру сложения поступающих на ее вход двоичных кодов.
Регистры — это быстродействующие ячейки памяти различной длины. При выполнении операций в регистр № 1 помещается первое число, участвующее в операции, а по завершении операции — результат. В регистр № 2 — второе число, участвующее в операции (по завершению операции информация в нем не изменяется).
Схемы управления принимают от шины управления сигналы от устройства управления и преобразуют их в сигналы для управления работой регистров и сумматора АЛУ.
УУ (MU, Management Unit):
- формирует и подает на все устройства ПК в нужные моменты времени определенные сигналы управления (управляющие импульсы);
- формирует адреса ячеек памяти, используемых выполняемой операцией, и передает эти адреса в соответствующие устройства.
Опорную последовательность импульсов устройство управления получает от генератора тактовых импульсов.
Принцип работы УУ
УУ является функционально наиболее сложным устройством ПК — оно вырабатывает управляющие сигналы, поступающие по шине управления во все блоки машины.
Регистр команд — это запоминающий регистр, в котором хранится код операции (КОП) и адреса операндов, участвующих в операции.
Дешифратор операций — это логический блок, выбирающий в соответствии с поступающим из регистра команд кодом операции (КОП) один из множества имеющихся у него выходов.
Постоянное запоминающее устройство (ПЗУ) микропрограмм хранит в своих ячейках управляющие сигналы (импульсы), необходимые для выполнения в блоках ПК процедур обработки информации.
Узел формирования адреса — это устройство, вычисляющее полный адрес ячейки памяти (регистра) по реквизитам, поступающим из регистра команд и регистров микропроцессорной памяти.
3. МПП (Микропроцессорная память)
Кэш-память (кэш) — сверхбыстрая память, хранящая содержимое наиболее часто используемых ячеек оперативной памяти, а также части программы, к которым процессор обратится с наибольшей долей вероятности. Процессор в первую очередь пытается найти нужные данные именно в кэш-памяти, а если их там не оказывается, обращается к более медленной оперативной памяти. Кэш-память делится на два или три уровня, которые обозначаются LI, L2 и L3 (чаще всего уровней два).
4. Сопроцессор — элемент процессора, выполняющий действия над числами с плавающей запятой.
Характеристики микропроцессора
Тактовая частота. Для каждой выполняемой процессором команды требуется строго определенное количество единиц времени (тактов). Тактовые импульсы формируются генератором тактовой частоты, установленным на системной плате. Чем чаще они генерируются, тем больше команд процессор выполняет за единицу времени, т. е. тем выше его быстродействие. Тактовая частота обычно выражается в мегагерцах. 1 МГц равен 1 миллиону тактов в секунду. Первые модели процессоров Intel (i8008x) работали с тактовыми частотами, меньшими 5 МГц. Сегодня тактовая частота последних процессоров превышает 3 ГГц (1 ГГц = 1000 МГц). Внутренняя архитектура процессора, как и тактовая частота, также влияет на работу процессора, поэтому два CPU с одинаковой тактовой частотой не обязательно будут тратить одинаковое время на выполнение одной команды. Если, например, микропроцессору Intel 80286 требовалось 20 тактов, чтобы выполнить команду умножения двух чисел, то Intel 80486 или старше мог выполнить это же действие за один такт. Некоторые процессоры способны выполнять более одной команды за 1 такт. Их называют суперскалярными.
Различают внутреннюю и внешнюю тактовую частоту.
Внешняя тактовая частота — это частота, с которой процессор обменивается данными с оперативной памятью компьютера. Как уже было сказано выше, она формируется генератором тактовых импульсов (кварцевым резонатором).
Внутренняя тактовая частота — это частота, с которой происходит работа внутри процессора. Именно это значение указывается в прайс-листах фирм, продающих процессоры.
Первые процессоры имели одинаковую внутреннюю и внешнюю частоту, но, начиная с процессора i80486, для определения внутренней частоты стал применяться коэффициент умножения. Этот коэффициент определяется подачей напряжения на определенные контакты центрального процессора.
Объем кэш-памяти. Как уже было сказано, при поиске нужной информации процессор в первую очередь обращается к кэш-па-мяти. Поэтому чем выше ее объем, тем больше вероятность, что необходимые данные будут найдены именно там.
Технологические нормы. Технологические нормы определяют расстояние между соседними транзисторами. Чем меньше расстояние, тем короче каналы транзисторов и тем больше их быстродействие. Кроме того, уменьшение расстояния понижает уровень мощности тепловыделения. В настоящее время все процессоры производятся с технологическими нормами 0,09 микрона, 0,065 микрона и 0,045 микрона (1 микрон = 10
6 метров). Иногда технологические нормы указывают в нанометрах (1 нм = 10
Количество ядер. Большинство современных процессоров выпускаются с несколькими ядрами (обычно их два или четыре). Благодаря наличию нескольких ядер процессор может одновременно обрабатывать несколько потоков программных команд, т. е. решать параллельно несколько задач в режиме реального времени.
Для определения основных характеристик процессора можно воспользоваться специальными сервисными программами. Примером такой программы является CPU-Z (рис. 2.24). Ее можно бесплатно скачать из Интернета.
1. Организация работы и функционирование процессора. Микропроцессоры типа CISC, RISC, MISC. Характеристики микропроцессора. Устройство управления, арифметико-логическое устройство.
1. Организация работы и функционирование процессора. Микропроцессоры типа CISC, RISC, MISC. Характеристики микропроцессора. Устройство управления, арифметико-логическое устройство.
Организация работы процессора:
Во время процесса процессор считывает последовательность команд, содержащихся в памяти, и исполняет их. Очерёдность считывания команд изменяется в случае, если процессор считывает команду перехода — тогда адрес следующей команды может оказаться другим. Другим примером изменения процесса может служить случай получения команды останова или переключение в режим обработки аппаратного прерывания.
Скорость перехода от одного этапа цикла к другому определяется тактовым генератором. Тактовый генератор вырабатывает импульсы, служащие ритмом для центрального процессора.
В основу было положено понятие потока, под которым понимается последовательность элементов, команд или данных, обрабатываемая процессором. Соответствующая система классификации основана на рассмотрении числа потоков инструкций и потоков данных и описывает четыре архитектурных класса:
· SISD (single instruction stream / single data stream) - одиночный поток команд и одиночный поток данных
· MISD (multiple instruction stream / single data stream) - множественный поток команд и одиночный поток данных.
· SIMD (single instruction stream / multiple data stream) - одиночный поток команд и множественный поток данных.
· MIMD (multiple instruction stream / multiple data stream) - множественный поток команд и множественный поток данных
В основе параллельного компьютера лежит идея использования для решения одной задачи нескольких процессоров, работающих сообща, причем процессоры могут быть как скалярными, так и векторными.
Конвейерная архитектура (pipelining) была введена в центральный процессор с целью повышения быстродействия. Обычно для выполнения каждой команды требуется осуществить некоторое количество однотипных операций, например: выборка команды из ОЗУ, дешифрация команды, адресация операнда в ОЗУ, выборка операнда из ОЗУ, выполнение команды, запись результата в ОЗУ. Каждую из этих операций сопоставляют одной ступени конвейера. Например, конвейер микропроцессора с архитектурой MIPS-I содержит четыре стадии:
· получение и декодирование инструкции (Fetch)
· адресация и выборка операнда из ОЗУ (Memory access)
· выполнение арифметических операций (Arithmetic Operation)
· сохранение результата операции (Store)
После освобождения k-й ступени конвейера она сразу приступает к работе над следующей командой. Если предположить, что каждая ступень конвейера тратит единицу времени на свою работу, то выполнение команды на конвейере длиной в n ступеней займёт n единиц времени, однако в самом оптимистичном случае результат выполнения каждой следующей команды будет получаться через каждую единицу времени
Способность выполнения нескольких машинных инструкций за один такт процессора. Появление этой технологии привело к существенному увеличению производительности.
Основными параметрами процессоров являются:
· коэффициент внутреннего умножения тактовой частоты,
· размер кэш памяти.
Тактовая частота определяет количество элементарных операций (тактов), выполняемые процессором за единицу времени. Тактовая частота современных процессоров измеряется в МГц (1 Гц соответствует выполнению одной операции за одну секунду, 1 МГц=106 Гц). Чем больше тактовая частота, тем больше команд может выполнить процессор, и тем больше его производительность. Первые процессоры, которые использовались в ПК работали на частоте 4,77 МГц, сегодня рабочие частоты современных процессоров достигают отметки в 2 ГГц (1 ГГц=103 МГц).
Разрядность процессора показывает, сколько бит данных он может принять и обработать в своих регистрах за один такт. Разрядность процессора определяется разрядностью командной шины, то есть количеством проводников в шине, по которой передаются команды. Современные процессоры семейства Intel являются 32-разрядными.
Рабочее напряжение процессора обеспечивается материнской платой, поэтому разным маркам процессоров отвечают разные материнские платы. Рабочее напряжение процессоров не превышает 3 В. Снижение рабочего напряжения разрешает уменьшить размеры процессоров, а также уменьшить тепловыделение в процессоре, что разрешает увеличить его производительность без угрозы перегрева.
Коэффициент внутреннего умножения тактовой частоты - это коэффициент, на который следует умножить тактовую частоту материнской платы, для достижения частоты процессора. Тактовые сигналы процессор получает от материнской платы, которая из чисто физических причин не может работать на таких высоких частотах, как процессор. Для получения более высоких частот в процессоре происходит внутреннее умножение на коэффициент 4, 4.5, 5 и больше.
В процессе работы процессор обрабатывает данные, находящиеся в его регистрах, оперативной памяти и внешних портах процессора. Часть данных интерпретируется как собственно данные, часть данных - как адресные данные, а часть - как команды. Совокупность разнообразных команд, которые может выполнить процессор над данными, образовывает систему команд процессора. Чем больше набор команд процессора, тем сложнее его архитектура, тем длиннее запись команд в байтах и тем дольше средняя продолжительность выполнения команд.
Весь ряд процессоров фирмы Intel, устанавливаемых в персональные компьютеры IBM, имеют архитектуруCISC, а процессоры Motorola, используемые фирмой Apple для своих персональных компьютеров, имеют архитектуру RISC. Обе архитектуры имеют свои преимущества и недостатки. Так CISC-процессоры имеют обширный набор команд (до 400), из которых программист может выбрать команду, наиболее подходящую ему в данном случае. Недостатком этой архитектуры является то, что большой набор команд усложняет внутреннее устройство управления процессором, увеличивает время исполнения команды на микропрограммном уровне. Команды имеют различную длину и время исполнения.
RISC-архитектура имеет ограниченный набор команд и каждая команда выполняется за один такт работы процессора. Небольшое число команд упрощает устройство управления процессора. К недостаткам RISC-архитектуры можно отнести то, что если требуемой команды в наборе нет, программист вынужден реализовать ее с помощью нескольких команд из имеющегося набора, увеличивая размер программного кода.
Упрощенная схема процессора, отражающая основные особенности архитектуры микроуровня, приведена на рис. 5. Наиболее сложным функциональным устройством процессора является устройство управления выполнением команд. Оно содержит:
· буфер команд, который хранит одну или несколько очередных команд программы; читает следующие команды из запоминающего устройства, пока выполняется очередная команда, уменьшая время ее выборки из памяти;
· дешифратор команд расшифровывает код операции очередной команды и преобразует его в адрес начала микропрограммы, которая реализует исполнение команды;
· управление выборкой очередной микрокоманды представляет собой небольшой процессор, работающий по принципу фон Неймана, имеет свой счетчик микрокоманд, который автоматически выбирает очередную микрокоманду из ПЗУ микрокоманд;
· постоянное запоминающее устройство (ПЗУ) микрокоманд - это запоминающее устройство, в которое информация записывается однократно и затем может только считываться; отличительной особенностью ПЗУ является то, что записанная в него информация сохраняется сколь угодно долго и не требует постоянного питающего напряжения.
Поступивший от дешифратора команд адрес записывается в счетчик микрокоманд устройства выборки, и начинается процесс обработки последовательности микрокоманд. Каждый разряд микрокоманды связан с одним управляющим входом какого-либо функционального устройства. Так, например, управляющие входы регистра хранения «Сброс», «Запись», «Чтение» соединены с соответствующими разрядами микрокоманды. Общее число разрядов микрокоманды может составлять от нескольких сотен до нескольких тысяч и равно общему числу управляющих входов всех функциональных устройств процессора. Часть разрядов микрокоманды подается на устройство управления выборкой очередной микрокоманды и используется для организации условных переходов и циклов, так как алгоритмы обработки команд могут быть достаточно сложными.
Выборка очередной микрокоманды осуществляется через определенный интервал времени, который, в свою очередь, зависит от времени выполнения предыдущей микрокоманды. Частота, с которой осуществляется выборка микрокоманд, называется тактовой частотой процессора. Тактовая частота является важной характеристикой процессора, так как определяет скорость выполнения процессором команд, и, в конечном итоге, быстродействие процессора. Другими словами тактовая частота показывает количество элементарных операций, выполняемых центральным процессором в секунду. Под элементарной операцией понимается любая простейшая операция типа сложения, пересылки, сравнения и т.д.
Арифметико-логическое устройство (АЛУ) предназначено для выполнения арифметических и логических операций преобразования информации. Функционально АЛУ состоит из нескольких специальных регистров, полноразрядного сумматора и схем местного управления.
Регистры общего назначения (РОН) используются для временного хранения операндов исполняемой команды и результатов вычислений, а также хранят адреса ячеек памяти или портов ввода-вывода для команд, обращающихся к памяти и внешним устройствам. Необходимо отметить, что если операнды команды хранятся в РОН, то время выполнения команды значительно сокращается. Одна из причин, почему программисты иногда обращаются к программированию на языке машинных команд, это наиболее полное использование РОН для получения максимального быстродействия при выполнении программ, критичных по времени.
Основными параметрами процессоров являются: рабочее напряжение, разрядность, рабочая тактовая частота, коэффициент внутреннего умножения тактовой частоты и размер кэш-памяти.
Рабочее напряжение процессора обеспечивает материнская плата, поэтому разным маркам процессоров соответствуют разные материнские платы (их надо выбирать совместно). Ранние модели процессоров x86 имели рабочее напряжение 5 В. С переходом к процессорам Intel Pentium оно понижено до 3,3 В, а в настоящее время составляет менее 3 В. Сверху микропроцессора всегда устанавливают вентилятор (куллер) для его охлаждения во время работы.
Разрядность процессора показывает, сколько бит данных он может принять и обработать в своих регистрах за одни раз (за одни такт) и определяется разрядностью этих регистров. Первые процессоры x86 были 16-разрядными. Начиная с процессора 80386, они имеют 32-разрядную архитектуру. Современные процессоры семейства Intel Pentium остаются 32 разрядными, хотя и работают с 64 разрядной шиной данных.
Обмен данными внутри процессора происходит в несколько раз быстрее, чем обмен с другими устройствами, например, с оперативной памятью. Для того чтобы уменьшить количество обращений к оперативной памяти, внутри процессора создают буферную область - так называемую кэш-память. Это как бы «сверхоперативная память». Когда процессору нужны данные, он сначала обращается в кэш-память, и только если там нужных данных нет, происходит его обращение в оперативную память. Принимая блок данных из оперативной памяти, процессор заносит его одновременно и в кэш-память. Высокопроизводительные процессоры имеют повышенный объем кэш-памяти.
Рассмотрим аппаратную архитектуру физической памяти и организацию управления ею на примере последних поколений процессоров Intel Pentium. Для управления памятью в процессор включен специальный модуль управления памятью, или, иначе, контроллер памяти (Memory Controller). В этом контексте схема обмена данными в компьютерной системе может быть представлена так, как показано на рис. 6. Данная схема отображает обмен данными в компьютерной системе, в которой используется процессор Intel Pentium 4. Все операции по обмену данными с устройствами со стороны процессора выполняет контроллер памяти.
Количество памяти, которая может быть использована программой, ограничено максимальным размером адресного пространства процессора. У процессора Intel Pentium 4, например, максимальное адресное пространство, включая физическую (оперативную) и виртуальную память, может достигать 64 Гбайт.
Процессор Intel Pentium 4 имеет два кэша данных, которые называются кэшем 1-го уровня (L1 Cache) и кэшем 2-го уровня (L2 Cache). Для серверных платформ разработаны модификации процессора, содержащие и кэш 3-го уровня, реализуется на отдельных быстродействующих микросхемах с расположением на материнской плате и имеют объем один и более Мб. Отметим важное обстоятельство - процессоры Intel Pentium 4 имеют также и кэш команд 1-го уровня (он называется Trace Cache), специфика работы которого отличается от особенностей работы кэшей данных.
Для сопоставления большого числа изготовленных и изготовляемых МП существует множество классификационных признаков. Ограничимся самыми главными:
по числу больших интегральных схем (БИС) в микропроцессорном комплекте различают микропроцессоры однокристальные, многокристальные и многокристальные секционные;
по технологии изготовления:
* рМОП - самая простая технология, но не обеспечивает высокого быстродействия МП (в настоящее время устарела);
* nМОП - более сложная технология, которая обеспечивает более высокое быстродействие МП, но не обеспечивает низкое энергопотребление;
* КМОП - самая сложная технология, которая обеспечивает низкое энергопотребление при достаточно высоком быстродействии МП (в настоящее время доминирует);
по ширине ШД (по длине обрабатываемых данных):
* 16-разрядные, применяемые для построения микро-ЭВМ (персональных микро-ЭВМ - ПЭВМ);
* 32-разрядные для построения ПЭВМ высокой производительности;
* секционные - для построения МПС с произвольной шириной ШД;
по виду синхронизации:
* синхронные, когда все процессы в МП и МПС синхронизированы сигналами тактового генератора (МП фирмы Intel);
* асинхронные, когда все процессы в МП и МПС протекают асинхронно (без участия сигналов тактового генератора, МП фирмы DEC);
по способу декодирования и выполнения команд: с использованием жесткой логики или микропрограммно.
Процессоры даже самых простых ЭВМ имеют сложную функциональную структуру, содержат большое количество электронных элементов и множество разветвленных связей. Изменять структуру процессора необходимо так, чтобы полная принципиальная схема или ее части имели количество элементов и связей, совместимое с возможностями БИС. При этом микропроцессоры приобретают внутреннюю магистральную архитектуру, т. е. в них к единой внутренней информационной магистрали подключаются все основные функциональные блоки (арифметико-логический, рабочих регистров, стека, прерываний, интерфейса, управления и синхронизации и др.).
Вырабатывает последовательность внутренних и внешних управляющих сигналов, обеспечивающих выборку и выполнение команд. Устройство управления интерпретирует команду выбранную из программной памяти, и формирует для АЛУ и других устройств требуемый набор команд низкого уровня – микрокоманд.
Микрокоманды задают последовательность элементарных низкоуровневых операций (микроопераций) (пересылка данных, сдвиг данных, установка и анализ признаков, запоминание результатов и т.д.)
Последовательность микрокоманд соответствующая оной команде называется микропрограммой.
В состав управляющего устройства входят три устройства:
1. Регистр команды – содержит код команды во время ее выполнения
2. Программный счетчик – в нем содержится адрес очередной подлежащей выполнению команды.
3. Регистр адреса – в нем вычисляются адреса операндов, находящихся в памяти.
4. Пульт управления – предусмотрен для связи пользователя с ЭВМ и позволяет производить сброс в начальное состояние, просматривать регистры и ячейки памяти, записывать адрес в программный счетчик, пошагово выполнять программу при ее отладке и т.д.
5. Память – устройство предназначено для запоминания, хранения и выборки программ и данных. Она состоит из конечного числа ячеек, каждая из которых имеет свой уникальный адрес (номер), доступ к ячейке осуществляется путем указания ее адреса.
Читайте также: