
Процессор насмешек робота для чего
Обновлено: 01.07.2024

Выбор самой главной части любого робота — его мозга — это очень важный и ответственный этап его построения.
Рассмотрим возможные варианты:
(как и любая попытка классификации — это довольно спорный и неполный список, но, как основа для дальнейшей работы, сойдёт и такой :))
1. простейший робот
здесь роль мозга выполняет простая микросхема, транзисторы и т.д.
2. простой робот
здесь роль мозга выполняет микроконтроллер (atmega, PIC. )
данное решение одно из самых простых и доступных.
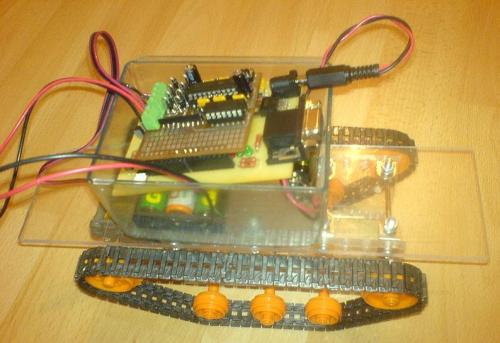
3. МК + ПК
Создать простого и доступного робота можно на базе микроконтроллера, который будет принимать информацию с датчиков, управлять различными механизмами робота (моторами, сервомашинками, реле и т.д.).
Однако, на простом МК не получится сделать обработку видео, распознавание речи и прочие вкусности «настоящего робота».
Но и из этого можно выкрутиться с минимальными потерями, разбив робота на две части:
1) робот на базе МК
2) ПК
связывать эти две части одного робота, можно по кабелю, но, удобнее всего, по радиоканалу.

Это очень удобное решение. Простое и доступное.
Золотая середина по простоте, доступности и функционалу.
К тому же, удобно программировать под той ОС, под которой Вы привыкли работать.
а вот далее идёт более обширный список различных вариантов более «мозговитых» роботов.
Сейчас компьютерная техника всё быстрее устаревает, поэтому всё больше старых ПК различной мощности пылятся в чуланах и углах.
Разумеется, нельзя не задумываться — как можно приспособить их для робототехники.
4. робот на базе обычного ПК или ноутбука
плюсы этого решения очевидны:
знакомый стандартный набор средств программирования,
множество готовых библиотек,
множество различной документации,
для управления можно использовать стандартные порты ввода/вывода (COM, LPT, USB),
возможно подключение любых устройств (например, различные web-камеры)
высокая производительность
минусы:
большие габариты,
если используется обычная материнская плата, то возникают трудности с высокой потребляемой мощностью ( для работы такого робота будут тяжёлые, громоздкие и дорогие аккумуляторы)
так же, обратите внимание, что обычная материнская плата требует одновременного наличия целого набора напряжений питания: ±12В, ±5В, ±3.3В что даёт дополнительные проблемы с блоком питания.
использование ноутбука, как кажется, решает эту проблему (более скромные габариты, встроенный аккумулятор), но если ноутбук уже старый, то его аккумулятор не сможет держать заряд достаточно долго, да и вес всё-равно будет в районе 3-5 килограмм.
Из этого следует вывод, что старые ПК лучше использовать в качестве стационарного пульта управления или в связке по радиоканалу с автономным модулем, но устанавливать на самого робота его не стоит.
* робот на базе специализированного ПК
сейчас всё большее распространение получают различные специализированные решения:
материнские платы формата Mini-ITX, или даже, Pico-ITX, причём эти ПК полностью совместимы с компьютерами x86.
Размеры плат и их небольшое энергопотребление делают их более чем привлекательными для роботов.
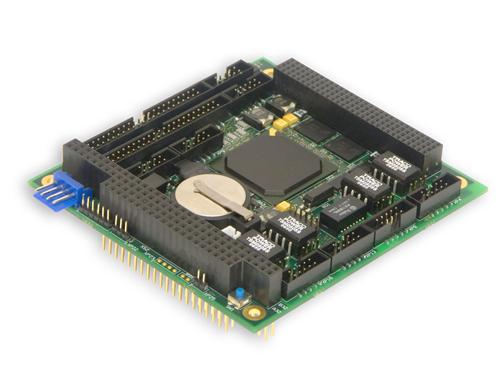
* робот на базе промышленного ПК
так же стоит обратить внимание на различные платы для промышленных ПК:
платы формата PC/104 или Micro PC.

обратите внимание, что модули PC/104 насаживаются друг на дурга в эдакий бутерброд (очень напоминает шилды Arduino)
плюсы:
совместимость с компьютерами x86;
низкое энергопотребление (стандартное напряжение 5В, потребление 5W (платы с потреблением более 10W — довольно редки));
небольшой размер (PC/104: 115 x 103 мм.)
множество различных плат расширения,
индустриальное качество плат (рабочий температурный диапазон: -40°C … +85°C, сторожевой таймер, требования по влажности, устойчивость к вибрациям и одиночным ударам)
минусы:
высокая цена,
в зависимости от платы может потребоваться использовать ОС для встраиваемых систем:
Windows CE, Windows Embedded, QNX.
почти все такие платы работают на базе маломощных процессоров:
Vortex86, AMD Geode

на базе Vortex86 построен робо-контроллер RoBoard
новые версии плат уже работают на процессорах Intel® Atom, Intel® Celeron M, Intel® Pentium M
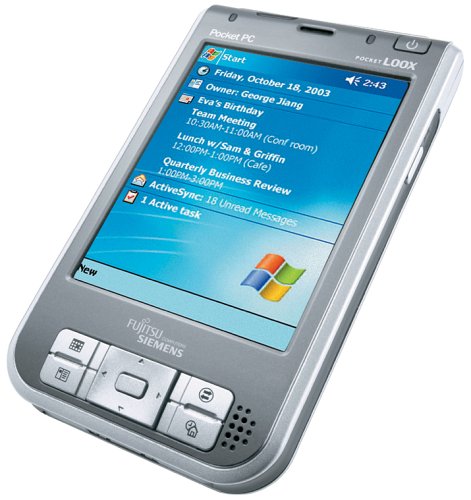
* робот на базе КПК
средняя производительность, хотя современный КПК и смартфоны стремительно догоняют по мощности обычные компьютеры.
плюсы:
компактность и небольшой вес (200 — 300 грамм),
низкое энергопотребление (особенно при выключенном экране),
Время автономной работы КПК — более чем приемлимо для робота.
минусы:
трудности подключения к КПК внешних устройств.
* робот на базе нетбука
как кажется, почти идеальное решение — плюсы ноутбука, но при этом небльшой вес и доступная цена
пример:
Asus Eee PC
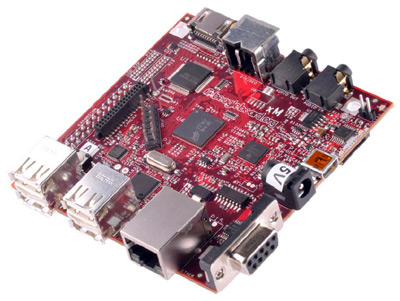
* робот на базе контроллера
микроэлектроника развивается и дарит нам возможность использовать свои новинки для создания по-настоящему мозговитых автономных роботов.
существует множество плат развития, контроллеров и отладочных плат:
(чаще всего на базе ARM)
Chumby Hacker Board
плюсы:
приемлемая цена,
малые габариты,
невысокое энергопотребление,
минусы (или, наоборот, плюсы):
установка ОС для встраиваемых систем:
урезанные дистрибутивы Linux
например:
Angstrom
uClinux
способ погружения и знакомства со встраиваемыми системыми, мини-Linux-ом и прочими вкусностями. Главное за всем этим не забыть — зачем всё это делается :)

* робот из переделанного устройства
различные устройства, которые можно переделать и использовать в качестве мозгов для робота.
Это Wi-Fi- роутеры:
D-Link DIR-300
D-Link DIR-320
TP-LINK TL-MR3020
которые позволят Вам работать с роутером так, как Вы сами того захотите, а управлять своим роботом через COM-порт, который почти всегда выведен на плате роутера.
А, например, у D-Link DIR-320 — вообще есть USB-порт ;)
Читайте также: