
В каких принтерах есть шаговые двигатели
Обновлено: 18.05.2024
Ответ: Шаговые двигатели - это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы. Далее: подробно о строении шагового двигателя
Ответ: Достоинства истекают из особенностей конструкции: - Шаговый двигатель может обеспечить очень точное перемещение на заданный угол, причем без обратной связи - поворот ротора зависит от числа поданных импульсов на устройство управления; - высокая точность позиционирования и повторяемость, так качественные шаговые двигатели имеют точность не хуже 5% от величины шага, при этом данная ошибка не накапливается; - хорошая надежность двигателя, обусловленная отсутствием щеток, при этом срок службы двигателя ограничивается лишь ресурсом подшипников; - обеспечивает получение сверхнизких скоростей вращения вала без использования редуктора; - работа в широком диапазоне скоростей, т.к. скорость напрямую зависит от количества входных импульсов. Недостатки - шаговый двигатель подвержен резонансу; - может пропустить шаги и реальная позиция вала окажется рассинхронизирована с позицией, заданной в управляющей системе - низкая удельная мощность шагового привода; - потребляемая энергия не уменьшается при отсутствии нагрузки; - малый момент на высоких скоростях;
Ответ: Шаговых двигателей существует множество разновидностей. В настоящее время 95% всех шаговых двигателей - гибридные. В зависимости от конфигурации обмоток двигатели делятся: а)Биполярный - имеет четыре выхода, содержит в себе две обмотки. б)Униполярный - имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины. в)Четырехобмоточный - имеет четыре независимые обмотки. Можно представлять его как униполярный, обмотки которого разъединены, а если соединить соседние отводы - получим биполярный двигатель.
В зависимости от типа электронного коммутатора управление шаговым двигателем может быть: однополярным или разнополярным; симметричным или несимметричным; ·потенциальным или импульсным. При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U. Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.

Ответ: Внутри находятся обмотки, зубчатый ротор и несколько подшипников. Не стоит разбирать рабочий двигатель. Ротор устанавливается с малым зазором, кроме того, система ротор-статор образует замкнутый магнитопровод, который намагничивается в собранном состоянии, и двигатель после разборки теряет существенную часть момента.
Ответ: Их существует множетсво как перемещение на определенный шаг, так для трехмерного использования. Могут управлять от одного до шести двигателей. Например MACH3, LinuxCNC, Turbocnc, NC Studio.
Ответ: Все характеристики двигателя находятся в тесной взаимосвязи и определяют главную - кривую зависимости крутящего момента от скорости. Рассматривать влияение характеристик надо для двигателей одного размера. Момент удержания - пиковое значение крутящего момента двигателя - зависит от тока и индуктивности обмотки. Чем больше индуктивность, тем больший момент удержания можно развить, но тем больше требуется напряжение питания на высоких скоростях, чтобы преодолеть индуктивное сопротивление и закачать нужный ток в обмотку. Ток обмотки также определяет выбор драйвера шагового двигателя. Напряжение питания обмотки равно U = I*R, номинальному току обмотки умноженному на напряжение и показывает, какое постоянное напряжение надо подать на обмотку, чтобы получить номинальный ток и, соответственно, момент удержания. Величина напряжения используется при выборе драйвера и характеристик источника питания.
Ответ: Этот вопрос неоднозначен, но все же дадим пару рекомендаций. Как правило, ориентироваться надо не на момент удержания, а на индуктивность. Лучше работают те двигатели, у которых индуктивность меньше - большинство задач требуют момента на высоких скоростях, и малая индуктивность требует меньшего напряжения питания. Нормальной индуктивностью можно считать 2-5 мГн для двигателей NEMA23 (фланец 57 мм), 4-6 мГн для двигателей NEMA34 (фланец 86 мм). Если А и Б - двигатели разного размера, смотрите кривую зависимости момента от скорости - чем она более пологая, тем лучше. См. более подробный алгоритм выбора шагового двигателя.
Ответ: Драйверы шаговых двигателей используются для управления биполярными и униполярными шаговыми двигателями с полным шагом, половинным и микрошагом. Они действуют как посредники между компьютером и двигателем и должны подбираться по напряжению и уровню мощности, типу сигнала (аналоговый и цифровой). Тип двигателя является самым важным фактором при выборе драйвера. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют две обмотки через которые ток проходит поочередно. Шаговые двигатели с полным шагом приводятся в движение благодаря изменениям магнитного поля относительно ротора. Полушаговые двигатели в свою очередь действуют также, как двигатели с полным шагом однако угловое перемещение ротора составляет половину шага полношагового двигателя. На каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла. Микрошаговые или минишаговые двигатели отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В драйверах минишаговых и микрошаговых двигателей используются электронные методы улучшения позиционного решения системы управления. Драйверы шаговых двигателей отличаются по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам. Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током. Драйверы для шаговых двигателей могут быть однофазными или трех фазными с частотой в 50, 60, или 400 Гц. Параметры управления включают в себя особенности установки и управления. В некоторых драйверах используются ручные средства управления типа кнопок, DIP-переключателей или потенциометров. В других используются джойстики, цифровые пульты управления, компьютерные интерфейсы, или слоты для карт PCMCIA (Международная ассоциация производителей карт памяти для персональных компьютеров). Программы контроля могут быть сохранены на передвижных, энергонезависимых носителях данных. Переносные блоки управления разработаны для управления с удаленных точек. Также доступно беспроводное и WEB управления. Форма драйверов позволяет сборку модуля в нескольких конфигурациях. Большинство устройств могут монтироваться на шасси, контактные DIN рельсы, панели, стойки, стены или печатные платы (PCB). Также возможна установка автономных устройств и интегральных микросхем, которые монтируются на печатные платы. Особенности драйверов: подавление резонанса; вспомогательные входы/выходы (I/O); мягкий старт; автонастройка, самодиагностика и проверка состояния; а так же сигнализация в таких случаях как перенапряжение. В драйверах используют много различных типов шин и коммуникационных систем. Шинные типы: (ATA), (PCI), (IDE), (ISA), (GPIB), (USB) и (VMEbus). Коммуникационные стандарты: ARCNET, AS-i, Beckhoff I/O, CANbus, CANopen, DeviceNet, Ethernet, (SCSI) и (SDS). Также доступно большое количество последовательных и параллельных интерфейсов. Соответствующая статья поможет подобрать драйвер биполярного двигателя для станка с ЧПУ,
Ответ: Чтобы это узнать, сделайте следующее: 1) проверьте, может ли драйвер выдавать ток фазы, равный(или примерно равный)току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя - драйвер не подходит. 2) Вычислите максимальное напряжение питания двигателя по формуле Umax = 32 * sqrt (L), где L - индуктивность обмоток двигателя в миллигенри(указывается производителем). Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся. Пример:подходит ли драйвер PLD545-G3 для двигателя PL86H151? Ток обмотки двигателя - 4.2 А, ток, выдаваемый драйвером - до 5А, первое условия выполнено. Индуктивность двигателя - 12 мГн, по формуле получаем Umax = 32 * sqrt(12) = 110 Вольт. Максимальное напряжение питания драйвера - 45 Вольт. Это означает, что двигатель будет отдавать момент только на низких оборотах, а для получения качественного движения необходимо использовать или драйвер с напряжением питания до 80 Вольт(например, PLD86 или PLD880), или двигатель с меньшей индуктивностью.
Ответ: Для начала надо определить, действительно ли двигатель перегревается. Многие воспринимают рабочую температуру двигателя как перегрев, потому что её "не терпит рука", тогда как нагрев в 80 градусов - нормальное явления для шагового двигателя. Поэтому необходимо замерить реальную температуру. Если она меньше 80 градусов - беспокоиться не стоит. Если больше - первое, что необходимо проверить, это выставленный рабочий ток на драйвере. Он должен соответствовать номинальному току двигателя. Также можно использовать функцию снижения тока обмоток в режиме удержания. К снижению нагрева приводит также снижение питающего напряжения, однако, и момент тоже снизится. Если нет возможности жертвовать динамикой двигателя, остается единственный способ - установить на корпус ШД радиатор и/или вентилятор.
Ответ: Пропуск шагов - самая неприятная проблема у шаговых приводов. Причин может быть множество. В порядке убывания распространенности:
С появлением 3D-принтеров жизнь людей стала значительно проще. Устройства успешно используют во многих сферах — стоматологии, промышленности, ювелирном деле и медицине. Сейчас 3D-принтер — не предмет роскоши, а вполне доступная по стоимости конструкция. Но все же есть те, кто решается на самостоятельное изготовление печатающих станков. Далее поговорим о том, как выбрать шаговый двигатель для будущего 3D-принтера и какие особенности при этом стоит учесть.
Двигатель на 3D-принтере
В конструкции 3D-принтера основную функцию за движение экструдера по осям выполняют шаговые двигатели. Они имеют незначительный вес и большой крутящий момент.
Шаговый электродвигатель — это двигатель, не имеющий коллектора, у которого вращение производится не плавно, а дискретно (шагами). Задавая скорость и длительность импульсов, можно заставить устройство вращаться в определенном направлении. При этом есть возможность регулировать направление вращения и количество оборотов ротора.
Если говорить о конструкции подобных устройств, то выделяют три основных вида:
- Двигатели с переменным магнитным сопротивлением — имеют несколько полюсов на статоре и ротор, изготовленный из мягкого материала, и 3 независимые друг от друга обмотки. Этот вид практически не используется.
- Двигатели с постоянным магнитным сопротивлением — в комплектацию входит статор и намагниченный ротор. Такие двигатели имеют от 24 до 48 шагов на один оборот.
- Устройства, сочетающие переменное и постоянное магнитное сопротивление (гибриды) — сочетание лучших свойств переменного и постоянного вращающего двигателя. Число шагов составляет от 100 до 400.
Гибридный двигатель — наиболее часто встречающаяся конструкция, которая, в свою очередь, делится на униполярный и биполярный тип.
Какие шаговые двигатели выбрать для 3D-принтера: лучшие варианты
При покупке вращающего устройства для 3D-принтера стоит обратить внимание на следующие параметры:
- размер вращающей конструкции;
- момент удержания — от 2,5–4 кг/см;
- номинальный ток — оптимальная версия на 1,7 А;
- вал — диаметр должен соответствовать конструктивным параметрам принтера.
Самые распространенные двигатели, которые устанавливают на конструкцию печатного устройства — биполярный с четырьмя выводами. Такие конструкции в случае поломки легко найти и заменить.

В 3D-принтерах устанавливаются вращающие моторы с маркировкой NEMA.
NEMA — Национальная ассоциация производителей электрооборудования, которая стандартизировала вращающие устройства по таким параметрам, как размер фланца и посадочные параметры. Такой стандарт позволяет разным производителям выпускать двигатели по определенным параметрам в зависимости от маркировки.
Самые востребованные модели в серии NEMA:
- NEMA 17 с фланцем 42 * 42 мм;
- NEMA 23 с фланцем 57 * 57 мм;
- NEMA 34 размером 86 * 86 мм.
Драйверы шаговых двигателей для 3D-принтера
Для управления двигателями в 3D-устройствах были разработаны драйверы, устанавливаемые в гнездо платы.

Драйверы бывают несколько типов:
- Постоянного напряжения — такие драйверы неэффективны и используются в изделии с малыми скоростями.
- Двухуровневые — подобные контроллеры поддерживают шаговые и полушаговые режимы. Они снижают нагрев двигателя и эффективны в работе.
- Драйверы с ШИМ — самые популярные, которые можно встретить на рынке. Они высокоинтеллектуальные и имеют множество дополнительных функций.
Также при выборе драйвера стоит обращать на следующие параметры:
- сила тока;
- напряжение питания;
- наличие опторазвязанных входов;
- наличие механизмов подавления резонанса;
- наличие протоколов, необходимых для работы двигателя;
- защита от скачков напряжения;
- микрошаговый режим;
- качество драйвера.
Собрать качественный 3D-принтер вполне реально, если следовать рекомендациям и внимательно изучить конструктивные устройства. Вполне возможно, что такой печатный станок обойдется его владельцу дешевле. Но новичкам мы рекомендуем заказывать готовые 3D-устройства в специализированных магазинах. Так вы сможете освоить азы 3D-печати и ознакомиться с устройством принтера. Желаем удачи!

Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
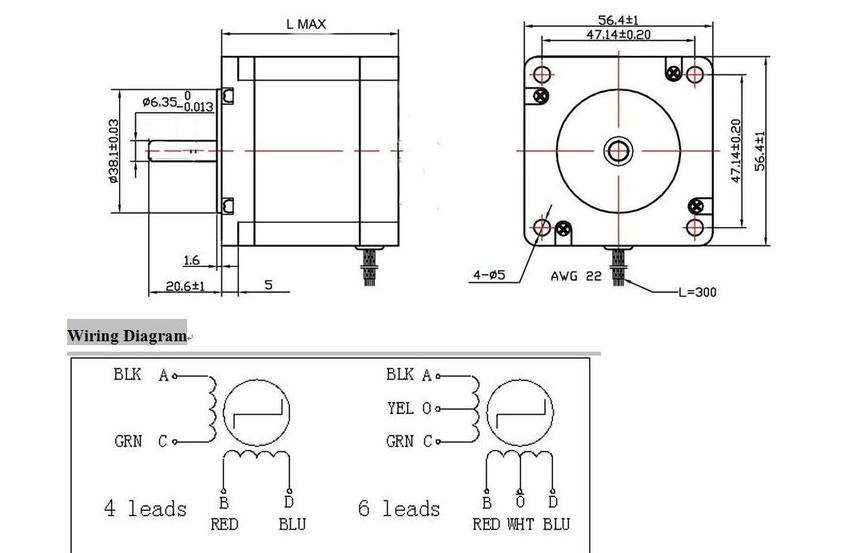
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
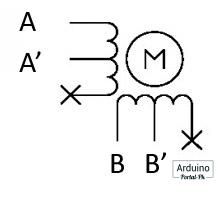
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
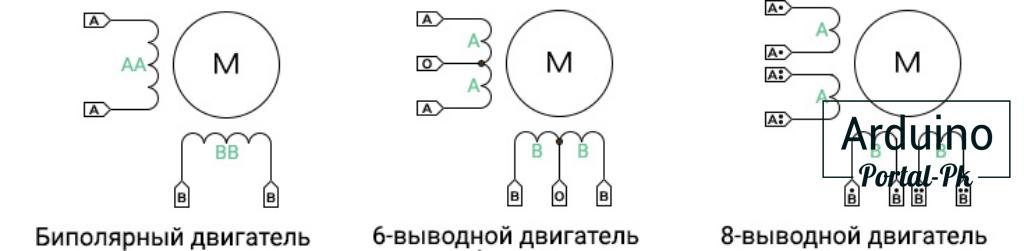
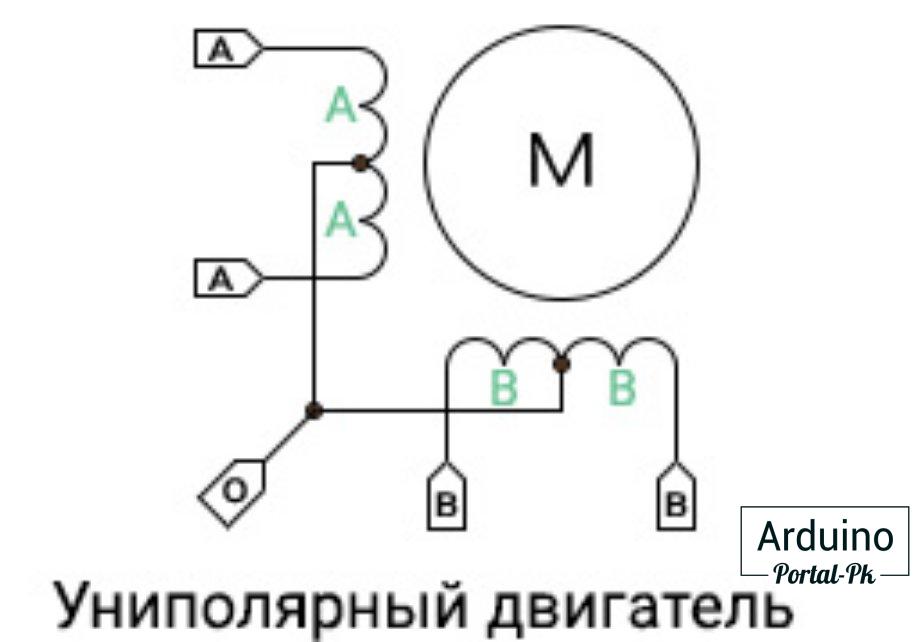
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
В данном случае ШД имеет момент в 1.4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
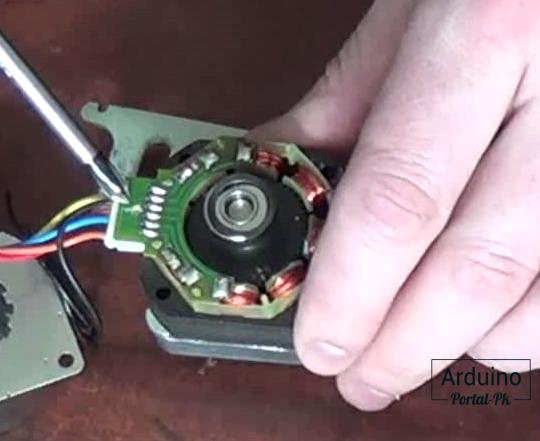
Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
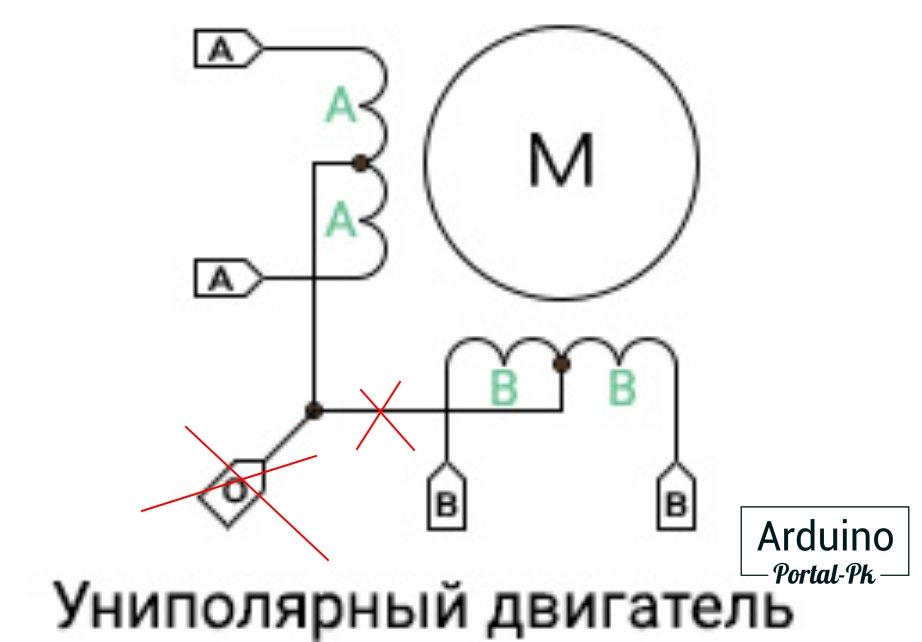
В итоге у нас получается биполярный двигатель с 4 выводами.
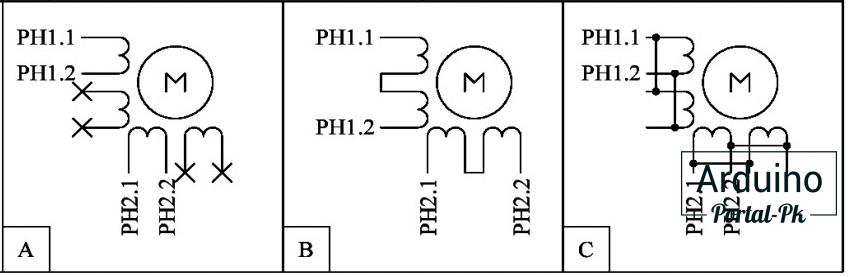
Подключение А - шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой .
Сопротивление обмотки, Ом
Рабочее напряжение, В
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.

Поводом для написания данной статьи послужила статья “Я хотел купить недорогой 3D-принтер, но посмотрел YouTube и расхотел”, в конце которой автор просит ответить на несколько вопросов. Попробую ответить с точки зрения своего семилетнего опыта 3D-моделера и 3D-печатника. Для начала небольшие предостережения.
В данной статье не будет советов: “Покупайте принтер производителя Х - он хороший, а производителя Y - не берите ни в коем случае”, только общие рекомендации.
Классификация принтеров неформальная, принятая в отечественном сегменте печатников.
Все написанное основано на личном опыте автора и является его личным мнением.
Если данные предостережения вас не пугают - добро пожаловать под кат.
Для начала представлюсь: меня зовут Максим и первый принтер я купил в далеком 2013 году. Это был китайский клон Makerbot 2 с веселым названием "Migce Cuble".

Фотография из личного архива
В рунете информации по 3D-печати почти не было, только одна тема на “Робофоруме” и несколько разрозненных статей про то, какая это крутая штука - 3D печать, так что для освоения приходилось много гуглить на английском, придумывать свои костыли и глубоко вникать в физику и технологию работы принтера. Надо отдать должное, в англоязычном сегменте тогда шло активное освоение данной технологии и попадались интересные статьи типа “Подбор типа насечек подающей шестерни экструдера под конкретный тип пластика” или “Определение оптимальной температуры печати с помощью тензодатчика, установленного на экструдере”. С тех пор прошло 7 лет. Я успел освоить моделирование, собрать принтер с нуля, немного побыть модератором “3D Today”, поработать фриласером в области моделирования и печати, организовать кружок прототипирования для детей и вывести его на российский уровень. Из последних достижений: поволонтерствовал координатором по снабжению пластика в проекте “Мейкеры проти ковид”. Многое поменялось за это время, в том числе и принтеры в моем домашнем зоопарке. Одно осталось неизменным - вопрос: “Что мне купить в качестве первого принтера?”.
В настоящее время в домашних условиях в основном используются два типа принтеров: печатающих по технологии FDM (FFF) - послойного наплавления пластика, подающегося в виде прутка и SLA (LCD) - печать фотоотверждающим полимером. Технология FDM более распространена, из-за более низкой стоимости оборудования и расходников, но за последние годы цены на LCD принтеры и смолы для печати значительно снизились и фотополимерная печать по себестоимости и уровню вхождения почти сравнялась с FDM печатью.

SLA и FDM
Честно скажу, SLA-печатью я почти не занимался и LCD-принтера до сих пор нет в моем домашнем зоопарке (но скоро может появиться), поэтому речь пойдет в основном о FDM принтерах. Их можно разделить на 3 основных категории по типу механики:
Дрыгостолы - принтеры со столом, подвижным по горизонтали. Пожалуй самая распространенная модель принтера. Отличается низкой себестоимостью комплектующих, простотой сборки и настройки, за что любима китайцами и печатниками. К недостаткам относится сложность создания закрытого корпуса и печати тонких высоких деталей, которые начинает шатать по мере увеличения высоты, особенно если деталь печатается из гибкого пластика типа TPU.

Типичные дрыгостолы
Кубики - принтеры в которых стол ездит по вертикали. Себестоимость таких принтеров выше, также как и требования к прямоте рук при сборке и настройке. Но правильно сконструированный кубик обеспечивает более высокую скорость печати при сохранении ее качества. При этом конструкцию принтера очень легко сделать закрытой, что позволяет печатать инженерными пластиками типа ABS и Nylon. Этот тип конструкции часто применяется в принтерах полупромышленного и промышленного класса. Некоторые производители умудряются запихать дрыгостол в корпус кубика, но особых плюсов для печатников это не приносит.

Типичные кубики
Дельты - принтеры с, так называемой, дельта-кинематикой, когда печатающая головка, с помощью системы тяг крепится к кареткам, перемещающимся по вертикальным направляющим. Себестоимость механики таких принтеров сравнима с себестоимостью дрыгостолов. Могут печатать на очень высоких скоростях. Но очень требовательны к правильности выдерживания размеров, прямоте рук при сборке и настройке, и скорости работы “мозгов” из-за сложных математических расчетов траектории перемещения головки.
Категорически не рекомендуются в качестве первого принтера, хотя повсеместное применение датчика уровня стола несколько снижает требования к прямоте рук при настройке и работе.

Типичные дельты
По доступности на рынке тоже можно выделить 3 основных категории:
Китайцы (дешевые китайские принтеры) - почти всегда конструкторы, даже если приходят в собранном состоянии.
К плюсам можно отнести низкую стоимость, широкую распространенность и унифицированность, что позволяет докупать вышедшие из строя детали в ближайшей радиобулошной или на известных китайских сайтах. Популярные модели собирают вокруг относительно большое количество пользователей, которое активно делится наработками в области самостоятельного ремонта и доработки данного типа принтеров. Самые ходовые модели, скорее всего будут печатать прямо “из коробки”, но потребуют доработок при более-менее долговременной эксплуатации.
К минусам относятся качество комплектующих/сборки и необходимость доработки данных принтеров для получения приемлемого качества/скорости печати. Рекомендуется брать модели, уже сформировавшие вокруг себя большое сообщество. Это означает, что большинство недостатков уже выявлено и существуют типовые недорогие методы их решения.
КИТы (наборы для сборки в основном отечественного производства) - гуглятся по словам “ZAV”, “UlTi”, “Ультумбочка” и т.д. Обычно представляют собой набор для сборки фанерного кубика. В последнее время появляются варианты с металлическими корпусами. Поставляются в разных вариантах - начиная от комплекта для сборки корпуса с напечатанными деталями, заканчивая полностью готовыми собранными изделиями.
К плюсам можно отнести достаточно хорошую инженерную проработку, возможность самому подобрать комплектующие для механической и электронной частей и сделать принтер полностью под свои требования. При хороших комплектующих обеспечивают быструю, стабильную и качественную печать. По цене выходят несколько дороже китайских принтеров, но дешевле полупрофессиональных принтеров отечественных или европейских/американских производителей.
К минусам можно отнести приличные затраты времени на сборку и ожидание комплектующих, если вы решите сэкономить и самостоятельно заказать эти комплектующие у разных продавцов и собрать из них принтер. При сборке требуют прямых рук.
Заводские принтеры (полупрофессиональные принтеры отечественных или американских/европейских производителей). Моделей очень много, конструкции самые разные.
Плюсом данного класса принтеров является печать с приемлемым качеством “из коробки”. В довесок вы получаете надежность в эксплуатации и гарантийную поддержку от производителя.
Основной минус - цена. Часто непонятно от каких факторов зависит. Можно купить высококачественный принтер относительно занедорого, а можно задорого взять что-то непонятное. Второй минус - наличие специфических решений, несовместимых с популярными решениями на рынке: это могут быть сопла со своим шагом резьбы, особые вентиляторы, электроника, ремни и даже слайсеры. Некоторые требовательны к качеству пластика, встречаются модели, работающие только на чипированных катушках.
Теперь, когда мы определились с классификацией принтеров можно приступать к процедуре выбора принтера для себя, любимого. Если вы загорелись покупкой 3D-принтера - сначала определитесь для чего вы его собираетесь брать, от этого зависит тип и комплектация принтера. Разберем несколько типовых ситуаций:
Хочу что-нибудь для себя и семьи делать - если не планируете печать изделий из инженерных пластиков, выдерживающих приличные нагрузки и температуры - хватит китайского дрыгостола или кубика. При наличии бюджета и желании разобраться как работает принтер до начала, а не во время печати можно посмотреть в сторону отечественных наборов для сборки - с ними можно получить лучшее качество и безболезненно перейти на инженерные пластики.
Ничего не умею делать руками, но надо. Поэтому хочу принтер, который за меня все делать будет - в этом случае лучше смотреть на полупрофессиональные принтеры. Если бюджета не хватает - можно посмотреть бывшие в употреблении или заказать сборку отечественного набора - обычно производители предлагают такую услугу через посредников. При заказе сборки - смотрите на наличие опыта и положительных отзывов, бывают нюансы.
Хочу на продажу печатать - ферма из однотипных принтеров, в зависимости от бюджета. Если нет бюджета, но есть ресурсы на регулярную настройку/ремонт - можно даже из китайских дрыгостолов. Дополнительно - принтер с большой областью печати, принтер с закрытым корпусом и нагреваемыми столом для печати инженерными пластиками, SLA/LCD-принтер для печати изделий с высокой степенью детализации.
По работе или дома возникает необходимость разработки и печати корпусов и деталей. Если планируются только прототипы небольшого размера - LCD-принтер, если функциональные изделия - закрытый кубик с возможностью печати инженерными пластиками.
Дети подрастают, а это технология будущего, хочу, чтобы освоили - посмотрите, какие принтеры используются на соревнованиях по прототипированию в вашем регионе. Возьмите такой-же. Можно бывший в употреблении.
Хочу фигурки для настолок делать, мелочи красивые для дома - LCD-принтер.
Хочу разобраться, что за технология и как это вообще работает - набор для сборки отечественного производителя. Пока собирать будете - как раз разберетесь.
Денег вообще нет, но печатать хочется, буду сам с нуля собирать - получится лучше и дешевле китайцев. Как не странно нет. Стоимость комплектующих с али выйдет дороже принтера с али. Конечно если есть станочный парк, умение им пользоваться, набор железа, валов и электроники валяющийся в углу мастерской, то может выгореть. Есть варианты построения принтеров из досок и мебельных направляющих, но качество печати у них, мягко говоря, хромает. Например, постройка принтера, изображенного ниже, обошлась его автору по его словам в 80-90 долларов.

Если хотите полностью с нуля собрать свой принтер, то лучше отнеситесь к этому, как к отдельному хобби и смиритесь, что получится не сильно дешево. Ну или посмотрите в сторону бывших в употреблении принтеров.
Вообще не знаю зачем мне принтер, но попробовать хочется - китаец или отечественный набор для сборки. Можно бывшие в употреблении. Если не зайдет - всегда можно перепродать.
С типом принтера определились - на что смотреть в первую очередь при покупке?
Во первых - на жесткость конструкции - именно от нее зависят точность и скорость печати. Именно в направлении усиления жесткости будут направлены ваши первые доработки китайского принтера, так-как материал “сталь пластилин 3 (с)” для китайцев считается непозволительной роскошью. В случае покупки отечественных КИТов ситуация чуть получше.
Во вторых - если принтер будет стоять в квартире - “бесшумные” драйвера для шаговых двигателей. 3D-печать процесс не быстрый и наличие постоянной достаточно громкой жужжалки под ухом надоедает.
В третьих - наличие подогреваемого стола и простота доработки до корпуса закрытого типа. Со временем придет желание (необходимость) печатать ABS, а на открытом дрыгостоле это сделать проблематично.
В четвертых - наличие хорошей системы обдува пластика тоже немаловажно.
В пятых - при выборе принтеров с механикой CoreXY, H-Bot или Delta сильно желательно наличие 32-битной платы управления, или столкнетесь с замираниями (фризами) на высоких скоростях печати.
В шестых, седьмых, и т.д - в конструкциях принтеров много нюансов. Если что-то непонятно - не стесняйтесь спросить у сообщества.
Со временем его возможностей перестанет хватать - тогда можно перейти на более серьезные САПР. На мой взгляд печатник должен владеть двумя типами редакторов - твердотельником для моделирования технических изделий (САПР) и полигональником (Blender и т.д.) - для моделирования художественных, но многие печатники считают это избыточным и осваивают, только один.
На этом пожалуй закруглюсь - статья и так вышла достаточно объемной, если есть вопросы - с удовольствием отвечу на них в комментариях или в отдельной статье. Сразу говорю - на вопросы типа: “что лучше: летающий медведь 5 или ендер 3” отвечать не буду - на эту тему уже сломано немало копий на профильных ресурсах, смысла повторяться не вижу.
Читайте также: