
1с что такое сау
Обновлено: 04.07.2024
(САУ) - комплекс устройств, предназнач. для автоматич. изменения одного или неск. параметров объекта управления с целью установления требуемого режима его работы. САУ обеспечивает поддержание постоянства заданных значений регулируемых параметров или их изменение по заданному закону (системы стабилизации, программного управления, следящие системы) либо оптимизирует определ. критерий качества управления (системы экстрем. регулирования, оптим. управления). При значит. изменениях параметров объекта управления и хар-к возмущений и помех применяются самонастраивающиеся системы. Для осуществления цели управления с учётом особенностей управляемых объектов на них подаются управляющие воздействия, к-рые предназначены также для компенсации внеш. возмущающих воздействий, стремящихся нарушить норм. функционирование объекта. Управляющие воздействия вырабатываются устройством управления.
По типу управления САУ подразделяются на замкнутые, разомкнутые и комбинированные. Осн. тип САУ - замкнутые, в к-рых цепь прохождения сигналов образует замкнутый контур, включающий устройство управления и управляемый объект; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь вне зависимости от причин, вызвавших эта отклонения. Такое управление наз. управлением по отклонению. В разомкнутых САУ управление ведётся по жёсткой программе без анализа и учёта к.-л. факторов в процессе работы управляемого объекта - на устройство управления не поступают сигналы, несущие информацию о текущем состоянии объекта управления, иногда измеряются и компенсируются лишь главные из возмущений (помех). Такое управление наз. управлением по возмущению. В комбинированных САУ используются оба эти принципа управления (по отклонению и по возмущению). В САУ сложными технич. системами (напр., производств. и энергетич. комплексами, трансп. средствами) или технологич. процессами с большим числом регулируемых параметров широко применяются средства вычислит. техники - микропроцессоры, ЭВМ, управляющие машины.
Большой энциклопедический политехнический словарь . 2004 .
Полезное
Смотреть что такое "СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ" в других словарях:
система автоматического управления — automatinio valdymo sistema statusas T sritis automatika atitikmenys: angl. automatic control system vok. automatisches Steuersystem, n rus. система автоматического управления, f pranc. système de commande automatique, m … Automatikos terminų žodynas
Система автоматического управления ГТД — совокупность устройств, автоматически обеспечивающих выполнение с требуемой точностью выбранных программ управления газотурбинным двигателем летательного аппарата на установившихся и переходных режимах его работы. С. а. у. ГТД выполняет следующие … Энциклопедия техники
система автоматического управления блоком «котёл - турбина» — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN boiler turbine control system … Справочник технического переводчика
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.

2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

Рис. 2.1.1 – Схематическое представление САУ (звена)
При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).
где: — стационарные значения входного и выходного воздействий;
— отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:
где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:
где — сила тяжести; — сила сопротивления пружины, — сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):
Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть
перейдем к отклонениям от стационарного состояния:
Пусть при t>0 . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
если , то уравнение принимает вид:
Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Рис. 2.1.3 – Статическая характеристика механического демпфера
Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:
тогда, разделив на k, имеем:
Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:
Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [];
— коэффициент в правой части (): [].
Тогда уравнение (2.1.6) можно записать в операторной форме:
где: — оператор диффренцирования;
-линейный дифференциальный оператор;
— линейный дифференциальный оператор, вырожденный в константу, равную .
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:
Подставляя эти соотношения в уравнение (2.1.2), имеем:
Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие , и, разделив на , получаем:
где: — коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента
Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
На рис. 2.1.4 представлены статические характеристики для механического демпфера:

Рис. 2.1.4 – Статические характеристики механического демпфера
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:
где дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 << 1, и поэтому уравнения динамики ядерного реактора, в принципе, могут быть линеаризованы.

Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:

Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:
Перенесем в левую часть уравнения и запишем уравнение в виде%
где -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:
Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния .
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если , то «простое» разложение функции в ряд Тейлора в окрестности точки будет выглядеть так:
C учетом вышеприведенного разложение принимает вид:
Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.:), оставим в разложении только члены первого порядка малости (линейные). Поскольку , получаем:
Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:
Коэффициенты — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:
где – оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора :
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:
Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>
Если вынести в правой части (2.2.7) коэффициент за общую скобку и разделить все уравнение на , то уравнение принимает вид:
или в операторном виде:
Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.
Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:
Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:

Рис. 2.2.3 – Линеаризации статической характеристики
• во-вторых, слагаемое в левой части — чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:
Подставляя значения x(t) и y(t) в исходное уравнение:
Удаляем полученного уравнения уравнения стационара: , а так же пренебрегая слагаемыми второго прядка малости: , получаем следующее уравнение:
Вводим новые обозначения:
Получаем уравнения в «почти» классическом виде:
Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:
Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:
Переходя к полной символике, имеем:
Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.
где: — решение однородного дифференциального уравнения y_(t) $inline$ - частное решение. $inline$
Будем называть решение однородного дифференциального уравнения , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть , вынужденным, так как эта часть решения определяется внешним воздействием , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
Напомним этапы решения:
1) Если имеется уравнение вида , то сначала решаем однородное дифференциальное уравнение:
2) Записываем характеристическое уравнение:
3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения
4) Тогда собственное решение записывается в виде:
если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:
Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:
5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения. .
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:
7) Используя начальные условия (t = 0), находим значения постоянных интегрирования . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если
Решение. Запишем однородное ОДУ:
Характеристическое уравнение имеет вид: ; Решая, имеем: тогда:
где — неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем как:
Подставляя в исходное уравнение, имеем:
Используя 1-е начальное условие (при t = 0), получаем: , а из 2-го начального условия имеем:
Решая систему уравнений относительно и , имеем:
Тогда окончательно:
Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:
Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).

Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).

Перед войной в СССР предпринимались многочисленные попытки создания различных самоходно-артиллерийских установок (САУ). Были рассмотрены десятки проектов, по многим из них построены опытные образцы. Но до массового принятия на вооружение дело так и не дошло. Исключение составили: 76-мм зенитная установка 29К на шасси грузовика ЯГ-10( 60 шт.), САУ СУ-12 - 76,2-мм полковая пушка образца 1927 года на шасси грузовика «Морланд» или ГАЗ-ААА(99 шт.), САУ СУ-5-2 - 122-мм гаубичная установка на шасси Т-26(30 шт.).

Наибольший интерес в противотанковом отношении представляла не принятая на вооружение САУ СУ-6 на шасси танка Т-26, вооруженная 76-мм зенитным орудием 3-К. Испытания установки проходили в 1936 году. Военных не устроило, что расчет СУ-6 в походном положении полностью на САУ не помещался и установщики дистанционных трубок должны были ехать на машине сопровождения. Это привело к тому, что СУ-6 признали непригодной для сопровождения мотомеханизированных колонн в качестве самоходной зенитной установки.

Хотя возможность использования её для борьбы с танками не рассматривалась, САУ вооруженные такими орудиями могли бы стать отличным противотанковым средством. Выпущенный из орудия 3-К бронебойный снаряд БР-361, на дистанции 1000 метров, по нормали пробивал 82-мм броню. Танки с таким бронированием стали массово применятся немцами только с 1943 года.
Справедливости ради стоит сказать, что в Германии к моменту вторжения в СССР так же не существовало серийных противотанковых САУ (ПТ САУ). Первые варианты САУ «Артштурм» StuG III вооружались короткоствольными 75-мм орудиями и существенными противотанковыми возможностями не обладали.

Однако наличие в производстве весьма удачной машины, позволило в короткие сроки путём наращивания лобовой брони и установки 75-мм орудия с длиной ствола 43 калибра, превратить её в противотанковую.
В ходе первых же боев Великой Отечественной войны остро встал вопрос о необходимости скорейшей разработки противотанковой самоходно-артиллерийской установки, способной быстро менять позиции и бороться с немецкими танковыми частями, которые по мобильности значительно превосходили части Красной Армии.
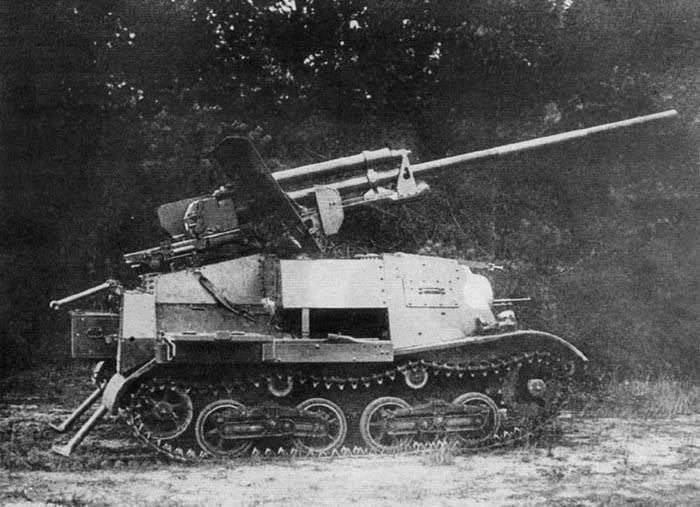
В срочном порядке на шасси лёгкого тягача «Комсомолец» была установлена 57-мм противотанковая пушка обр.1941 года, обладавшая отличной бронепробиваемостью. На тот момент, это орудие уверенно поражало на реальных дистанциях боя любой немецкий танк.
ПТ САУ ЗИС-30 представляла собой легкую противотанковую установку открытого типа.
Боевой расчет установки состоял из пяти человек. Верхний станок орудия крепился в средней части на корпусе машины. Углы вертикальной наводки составляли от -5 до +25°, по горизонту – в секторе 30°. Стрельба велась только с места. Устойчивость самоходной установки при стрельбе обеспечивалась с помощью откидных сошников, располагавшихся в кормовой части корпуса машины. Для самообороны самоходной установки использовался штатный 7,62-мм пулемет ДТ, устанавливавшийся в шаровой опоре справа в лобовом листе кабины. Для защиты расчета от пуль и осколков использовалось броневое щитовое прикрытие пушки, которое имело откидную верхнюю часть. В левой половине щита для наблюдения имелось специальное окно, закрывавшееся подвижным щитком.
Производство ЗИС-30 продолжалось с 21 сентября до 15 октября 1941 года. За этот период завод изготовил 101 машину с пушкой ЗИС-2 (включая и опытную машину) и одну установку с 45-мм пушкой. Дальнейшее производство установок было остановлено в связи с отсутствием снятых с производства «Комсомольцев» и прекращением выпуска 57-мм орудий.
САУ ЗИС-30 начали поступать в войска в конце сентября 1941 года. Ими были укомплектованы противотанковые батареи 20 танковых бригад Западного и Юго-Западного фронтов.

В ходе интенсивного применения у самоходки выявился целый ряд недостатков таких, как плохая устойчивость, перегруженность ходовой части, малый запас хода, малый боекомплект.
К лету 1942 года в войсках практически не осталось ПТ САУ ЗИС-30. Часть машин была потеряна в боях, а часть, вышла из строя по техническим причинам.
С января 1943 года началось серийное производство созданных Н.А. Астровым на базе лёгкого танка Т-70, самоходных 76-мм установок СУ-76( позже Су-76М). Хотя эта лёгкая САУ очень часто привлекалась для борьбы с танками противника, считать её противотанковой нельзя. Броневая защита СУ-76 (лоб: 26-35 мм, борт и корма: 10-16 мм) предохраняла экипаж (4 человека) от стрелкового огня и тяжелых осколков.

При правильном использовании, а это пришло не сразу (САУ не танк), СУ-76М хорошо показали себя как в обороне - при отражении атак пехоты и как подвижные, хорошо защищенные противотанковые резервы, так и в наступлении - при подавлении пулеметных гнезд, разрушении дотов и дзотов, а также в борьбе с контратакующими танками. На бронированную машину устанавливалась дивизионная пушка ЗИС-3. Ее подкалиберный снаряд с дистанции 500 метров пробивал броню до 91 мм, то есть любое место корпуса немецких средних танков и борта «пантеры» и «тигра».
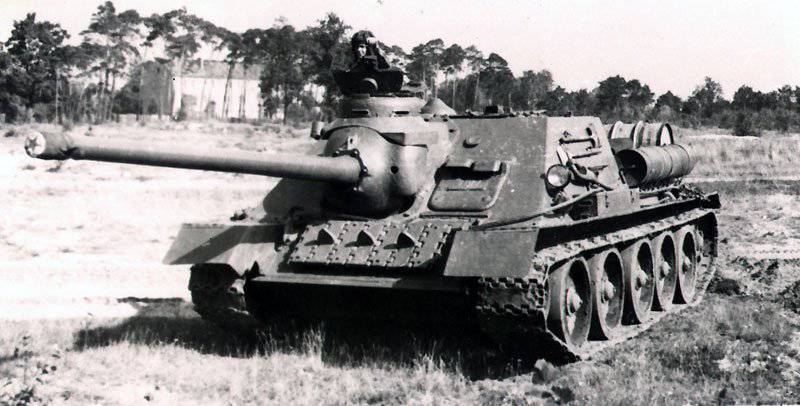
По характеристикам вооружения к СУ-76М была очень близки САУ СУ-76И, созданные на базе трофейных германских танков Pz Kpfw III и САУ StuG III. Первоначально планировалось установить в боевом отделении САУ 76,2-мм пушку ЗИС-3Ш (Ш — штурмовая), именно эта модификация пушки устанавливалась на серийные САУ СУ-76 и СУ-76М на станке, укрепленном к полу, но такая установка не обеспечивала надежной защиты орудийной амбразуры от пуль и осколков, так как при подъеме и повороте орудия в щите неизменно образовывались щели. Эта проблема была решена установкой вместо 76-мм дивизионной пушки специального самоходного 76,2-мм орудия С-1. Это орудие было спроектировано на базе конструкции танковой пушки Ф-34, которым оснащались танки Т-34.

При одинаковой с СУ-76М огневой мощи, СУ-76И гораздо больше подходила для использования в качестве противотанковой из-за лучшей защищённости. Лоб корпуса имел противоснарядное бронирование толщиной – 50-мм.
Производство СУ-76И было окончательно остановлено в конце ноября 1943 года в пользу СУ-76М, которая уже избавилась к тому времени от «детских болезней». Решение о прекращении производства СУ-76И было связано с сокращением применяемых на Восточном фронте количества танков Pz Kpfw III. В связи с этим уменьшалось количество захваченных танков этого типа. Всего было выпущено 201 САУ СУ-76И (включая 1 опытную и 20 командирских), которые приняли участие в боях 1943-44 гг., но ввиду малочисленности и трудностей с запасными частями довольно быстро исчезли из Красной Армии.
Первой специализированной, отечественной ПТ САУ способной действовать в боевых порядках наравне с танками, стала СУ-85. Эта машина стала особенно востребована после появления на поле боя немецкого танка PzKpfw VI "Tiger". Броня "Тигра" была такой толщины, что ее с большим трудом и только на самоубийственно близких дистанциях могли пробить орудия Ф-34 и ЗИС-5, устанавливаемые на Т-34 и КВ-1.

Специальные стрельбы по захваченному немецкому танку показали, что гаубица М-30, установленная на СУ-122, имеет недостаточную скорострельность и малую настильность. Вообще, для стрельбы по быстро передвигающимся целям она оказалась мало приспособлена, хотя и обладала неплохой бронепробиваемостью после введения кумулятивного боеприпаса.
По распоряжению ГКО от 5 мая 1943 года, КБ под руководством Ф.Ф.Петрова развернуло работы по установке 85-мм зенитного орудия на шасси СУ-122.

Пушка Д-5С имела ствол длиной 48,8 калибра, дальность стрельбы прямой наводкой достигала 3,8 км, максимально возможная — 13,6 км. Диапазон углов возвышения составлял от −5° до +25°, сектор горизонтального обстрела был ограничен значениями ±10° от продольной оси машины. Боекомплект орудия составлял 48 выстрелов унитарного заряжания.
По советским данным, 85-мм бронебойный снаряд БР-365 по нормали пробивал на расстоянии 500 м бронеплиту толщиной 111 мм, на вдвое большей дистанции при тех же условиях — 102 мм. Подкалиберный снаряд БР-365П на расстоянии 500 м по нормали пробивал бронеплиту толщиной 140 мм.

Отделение управления, моторное и трансмиссионное остались такими же, как у танка Т-34, что позволило комплектовать экипажи для новых машин практически без переучивания. Для командира в крыше рубки приваривался броневой колпак с призматическими и перископическими приборами. На самоходных установках поздних выпусков броневой колпак был заменен командирской башенкой, как у танка Т-34.
Общая компоновка машины, была аналогична компоновке СУ-122, отличие заключалось только в вооружении. Защищённость СУ-85 была аналогична Т-34.
Машины этой марки выпускались на «Уралмаше» с августа 1943 по июль 1944 года, всего было построено 2337 самоходок. После разработки более мощной самоходки СУ-100 из-за задержки выпуска 100-мм бронебойных снарядов и прекращения выпуска бронекорпусов для СУ-85 с сентября до декабря 1944 года выпускался переходный вариант СУ-85М. Фактически он представлял собой СУ-100 с 85-мм пушкой Д-5С. От исходного варианта СУ-85 модернизированная СУ-85М отличалась более мощной лобовой бронёй и увеличенным боезапасом. Всего было построено 315 таких машин.
Благодаря использованию корпуса СУ-122 удалось очень быстро наладить массовое производство ПТ САУ СУ-85. Действуя в боевых порядках танков, они эффективно поддерживали огнем наши войска, поражая немецкие бронированные машины с дистанции 800—1000 м. Особенно отличались экипажи этих самоходок при форсировании Днепра, в Киевской операции и в ходе осенне-зимних боев на Правобережной Украине. Если не считать немногочисленные КВ-85 и ИС-1, до появления танков Т-34-85, только СУ-85 могли эффективно бороться со средними танками противника на дистанциях более километра. А на меньших дистанциях и пробивать лобовую броню тяжёлых танков. Вместе с тем, уже первые месяцы применения СУ-85 показали, что мощность её орудия недостаточна для эффективной борьбы с тяжёлыми танками противника, такими как «Пантера» и «Тигр», которые, обладая преимуществом в огневой мощи и защите, а также эффективными прицельными системами, навязывали бой с дальних дистанций.
Построенные в середине 1943 года СУ-152 и появившиеся позже ИСУ-122 и ИСУ-152 поражали в случае попадания любой немецкий танк. Но для борьбы с танками из-за высокой стоимости, громоздкости и низкой скорострельности они не слишком подходили.
Главным назначением этих машин было разрушение укреплений и инженерных сооружений и функции огневой поддержки наступающих подразделений.
В середине 1944 года под руководством Ф. Ф. Петрова, с использованием выстрелов морского зенитного орудия Б-34, была сконструирована еще более мощная, 100-мм пушка Д-10С. Пушка Д-10С обр. 1944 г. (индекс «С» — самоходный вариант), имела длину ствола в 56 калибров. Бронебойный снаряд пушки с расстояния в 2000 метров поражал броню толщиной 124 мм. Осколочно-фугасный снаряд массой 16 кг позволял эффективно поражать живую силу и разрушать укрепления противника.
Используя это орудие и базу танка Т-34-85, конструкторы «Уралмаша» оперативно разработали истребитель танков СУ-100 — лучшую противотанковую САУ второй мировой войны. По сравнению с Т-34 лобовая броня была усилена до 75-мм.
Пушка устанавливалась в лобовой плите рубки в литой рамке на двойных цапфах, позволявших её наведение в вертикальной плоскости в пределах от −3 до +20° и в горизонтальной ±8°. Наводка осуществлялась при помощи ручных подъёмного механизма секторного типа и поворотного механизма винтового типа. Боекомплект орудия состоял из 33 унитарных выстрелов, размещавшихся в пяти укладках в рубке.
СУ-100 обладала исключительной для своего времени огневой мощью и была способна вести борьбу с танками противника всех типов на всех дистанциях прицельного огня.
Серийное производство СУ-100 началось на «Уралмаше» в сентябре 1944 года. До мая 1945 года завод успел произвести более 2000 этих машин. Выпуск СУ-100 на «Уралмаше» велся, по меньшей мере, до марта 1946 года. Омский завод № 174 в 1947 году выпустил 198 СУ-100, и ещё 6 — в начале 1948 года, суммарно выпустив 204 машины. Выпуск СУ-100 в послевоенное время был также налажен в Чехословакии, где в 1951—1956 годах по лицензии выпустили ещё 1420 САУ этого типа.
В послевоенные годы значительная часть СУ-100 была модернизирована. На них появились ночные приборы наблюдения и прицелы, новое противопожарное и радиооборудование. В боекомплект был введён выстрел с более эффективным бронебойным снарядом УБР-41Д с защитным и баллистическим наконечниками, а позднее — с подкалиберным и невращающимся кумулятивными снарядами. Штатный боекомплект САУ в 1960-х годах состоял из 16 осколочно-фугасных, 10 бронебойных и 7 кумулятивных снарядов.
Имеющие с танком Т-34 одну базу, СУ-100 широко распространились по миру, официально состояв на вооружении более чем в 20 странах, они активно использовалась в многочисленных конфликтах. В ряде стран они всё еще в строю.
В России СУ-100 можно было встретить «на хранении» вплоть до конца 90-х.

ИС-2 - танк Победы. На этих грозных машинах вместе с модернизированными Т-34 наши танкисты завершали Великую Отечественную войну. Вооружение танка ИС-2 позволяло ему поражать немецкие танки на расстоянии двух – двух с половиной километров.
Первый вариант тяжелого танка ИС-1 был разработан во второй половине 1942 года. Тяжелый танк ИС-1 с 85-мм пушкой Д-5Т (он же ИС-85 или «Объект 237») был создан летом 1943 года. Но вскоре стало ясно, что для тяжелого танка эта пушка была слишком слаба. В октябре 1943 года была осуществлена проработка варианта танка ИС с более мощной танковой пушкой Д-25 калибра 122-мм. Танк был отправлен на испытательный полигон под Москвой, где из его пушки с расстояния 1500 метров был произведен обстрел немецкого танка «Пантера». Первый же снаряд пробил лобовую броню «Пантеры» и, не утратив своей энергии, прошил все внутренности, ударил в кормовой лист корпуса, оторвал его и отбросил на несколько метров. Под маркой ИС-2 в октябре 1943 года танк был принят в серийное производство, которое было развернуто в начале 1944 года.
А каково воевать на ИС-1 и ИС-2? Насколько велики были потери у экипажей этих могучих машин?
Рота капитана Гмирянского, уничтоженная в несколько секунд
Борис Захаров на ИСах воевал с начала 1944 года. В 13-ый отдельный гвардейский тяжелый танковый полк на должность командира танкового взвода он был зачислен 13-го января 1944-го года приказом номер 13. Под его командой был танк командира роты и два линейных танка. Во втором взводе роты было два танка. Всего в полку состоял 21 танк ИС-1. К сожалению, на этих машинах полку не суждено было испытать радость полноценных боевых побед. Но вряд ли причины этого следует искать в недостатках конструкции ИС-1. Дело было совсем в другом:
«В начале 1944 года наш полк направили на 2-й Украинский фронт. Поначалу мы стояли в обороне в районе населенного пункта Джурженцы, а на рассвете 15 февраля, нас вывели на позиции у населенного пункта Лысянка. При передислокации мой танк подорвался на мине. Взрывом выбило первый каток, заклинило коробку передач. Однако поскольку ленивец остался цел, мы сумели натянуть гусеницу и привести машину в назначенный район. Еще у одного танка моего взвода обнаружилась течь в редукторе (бортовые редукторы на ИС-1 были очень слабые и быстро выходили из строя). Таким образом, во взводе остался всего один боеспособный танк, а в роте - три. Полк, а вместе с ним и наша рота, разместились на лесистой возвышенности перед Лысянкой. С нее хорошо просматривалась окраина населенного пункта, находившегося примерно в полукилометре, и насыпь узкоколейной железной дороги, по которой вывозили сахар с сахарного завода на станцию Поташ. Она шла параллельно населенному пункту, и ее требовалось пересечь, чтобы добраться до городка. На следующее утро командир полка, получив задачу на атаку населенного пункта Лысянка, решил использовать первую роту, в которой все пять танков были исправны. Командовал ею капитан Гмирянский… Первая атака, которую мне пришлось видеть, оставила тяжелое впечатление. Тяжелое, потому что потом, имея определенный боевой опыт, я оценил действия командования полка как непродуманные. Безо всякой разведки, без огневой поддержки рота была брошена на противника. Развернувшись в линию, пять танков пошли вперед, и, когда они начали забираться на эту насыпь, немецкие зенитки, установленные на окраине Лысянки, уничтожили их буквально в течение несколько секунд. Некоторые танки продолжали катиться, пока не завязли в снегу, некоторые загорелись. Вся рота погибла».
Сколько же крови стоила не одним только танкистам, но и всей Красной Армии манера немалого, увы, количества начальства бросать войска в атаку без разведки и артподготовки.
Самое обидное, что местность вполне позволяла роте капитана Гмирянского наступать по-другому:
«В 1974 году, когда отмечалось 30-летие освобождения района, мы поехали с ветеранами полка по местам боевой славы. Заехали в Лысянку, побывали на месте этого боя. Когда прошли чуть правее от места расположения нашего полка, то увидели небольшой овраг. Если бы была проведена разведка, наверное, можно было бы эту Лысянку обойти по низинке и зайти немцам в тыл. Кроме того, наши танки, оставшиеся в резерве, могли поддержать огнем атаку, но ни одному танку боевой задачи поставлено не было. Спрашивается, почему? Расчет был на то, что эти новые танки неуязвимы, что они могут пройти через любой огонь».
Удачи не было и далее: «Дойдя до середины моста, танк обвалил его левую сторону, перевернулся и упал в реку, уйдя под воду так, что на поверхности торчала лишь правая гусеница. Я сидел перед люком механика водителя, освещая переноской дорогу (фары мы не включали, опасаясь налета немецкой авиации). Меня сбросило в воду, но я достаточно легко выбрался сначала на танк, а с него и на остатки моста, а экипаж остался в танке… Полк, переправившись в другом месте, ушел вперед, а я остался ждать эвакороту, чтобы вытащить танк, захоронить экипаж. Догнал я полк уже в Молдавии где-то в начале мая. Матчасти в полку практически не осталось: много потеряли по техническим причинам, а также в результате боевых действий».
Это было побоище. Немцы не успели сделать ни одного выстрела!
Уцелевших танкистов погрузили в эшелон и направили в Тесницкие лагеря под Тулу получать новые танки ИС-2 с 122-мм пушкой. На этих танках боевые действия выглядели уже по-другому. Довелось полку с лихвой рассчитаться за роту Гмирянского: «В составе передового отряда 6-го механизированного корпуса мы вышли к реке Чарна Нида. Подошли к мосту, что располагался около мельницы. Мост оказался слабеньким, и наши разведчики пошли вверх по течению в поисках брода, а мы рассредоточились, спрятав танки за каменным забором. Дело было к концу дня, когда на высотке в нашем тылу мы заметили появление то ли бронетранспортера, то ли танка. Стрелять по нему мы не стали - далеко. Видимо, не обнаружив нас, разведывательная машина, а это была именно она, дала команду колонне немецких танков и бронетранспортеров двигаться вперед. Когда первая машина уткнулась в мост, мы открыли огонь из засады. Это было побоище. Немцы не успели сделать ни одного выстрела! Через несколько минут на дороге горело два десятка костров».
В ходе боев выяснилось, что даже осколочно–фугасный снаряд пушки ИС-2 смертельно опасен для немецкой бронетехники:
«Полк двигался по асфальтовой дороге местного значения (после прохождения колонны танков от асфальта мало что оставалось). Немцы на дороге устраивали завалы из елей, росших рядом с дорогой, а в крону упавшего дерева подкладывали противотанковые мины. Мой танк шел первым. Я, для того чтобы себя обезопасить, расстреливал кроны деревьев осколочными снарядами, а сам пускал танк по комлевой, голой части ствола. Так мы продвигались по этой дороге, когда впереди примерно в трехстах метрах я увидел, что дорога выходит из леса на Т-образный перекресток. Командир орудия Миша Козак, отличный стрелок, заметил какое-то шевеление в кустах, росших прямо возле перекрестка.
Как потом оказалось, там была самоходная артиллерийская установка «Артштурм», которой, по-видимому, пришлось слегка развернуться, для того чтобы взять нас в прицел. В нашем орудии был заряжен осколочно-фугасный снаряд, и нам ничего не оставалось, как выстрелить им. Самоходка загорелась с первого же выстрела! Выйдя на перекресток, я повернул влево. Механик-водитель шедшего за мной танка не справился с управлением, танк завалился в овраг, который был с правой стороны от дороги, и застрял. Я вылез из машины, оставив командиром механика-водителя, а сам пошел посмотреть и организовать вытаскивание. Подойдя к танку, я дал команду экипажу третьей машины сделать связку тросов, зацепить танк и вытянуть его задним ходом. В это время прибежал заряжающий с криком: «Танки. » Я приказал экипажам двух машин заниматься эвакуацией, а сам побежал к машине, сел и дал команду выдвинуться вперед на поворот дороги. Выйдя на его середину, я увидел, что метрах в восьмистах навстречу мне движется колонна противника. Виден был только передний танк, остальные были закрыты пылью. Командир орудия первым же осколочным снарядом этот танк сжег».
Конечно, далеко не всегда осколочный снаряд ИС-2 мог поразить немецкий танк: «Вдруг из деревни вырывается немецкий танк, облепленный человеческими фигурами так, что башни вообще не видно было. Он был, как ежик! Я говорю командиру орудия: «Видишь цель?» – «Нет, не вижу» - «Давай, крути башню влево». А танк уже уходит. Все-таки наводчик заметил этот танк и осколочным снарядом вломил. Танк он не подбил, но удирал он уже совершенно голый, вся эта людская масса была сметена взрывом».
Но и могучие ИС-2, конечно, не были неуязвимым чудо – оружием. До самого конца войны полк, где служил Захаров, нес тяжелые потери: «Под Берлином наш полк принимал участие в овладении небольшими населенными пунктами, в частности городком Люкенвальде. Моя рота, в которой было всего полтора десятка танкистов, к тому времени осталась без танков. В конце апреля нам было приказано, вооружившись стрелковым оружием и трофейными фаустпатронами, прикрыть перекресток дорог в районе деревни Енникендорф».
Идеального сверхоружия, позволяющего всегда без потерь уничтожать врага, никогда в истории не существовало. И грозный «Иосиф Сталин» и в варианте ИС-1, и в варианте Ис-2 не был исключением из этого правила…
Читайте также: