
Драйвер моторов motor shield это
Обновлено: 04.07.2024
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Принцип действия H-моста
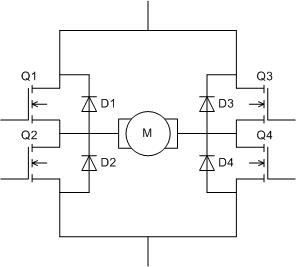
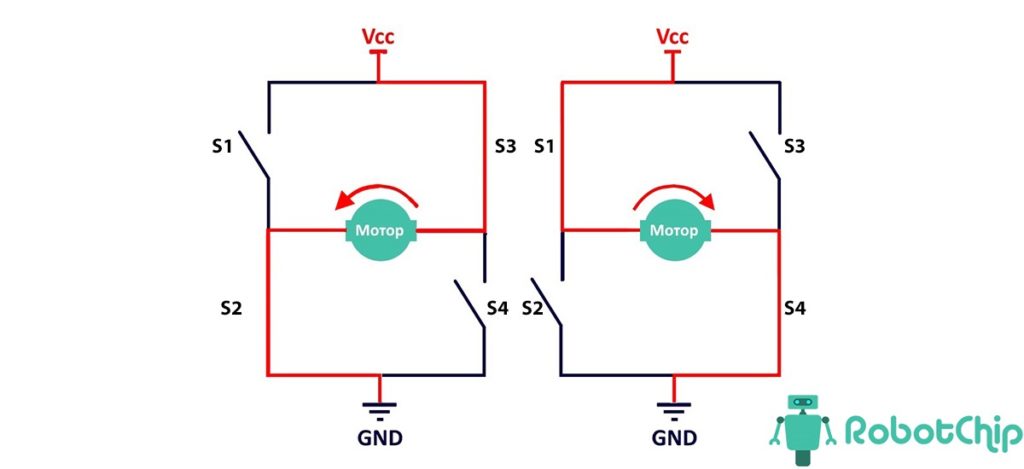
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

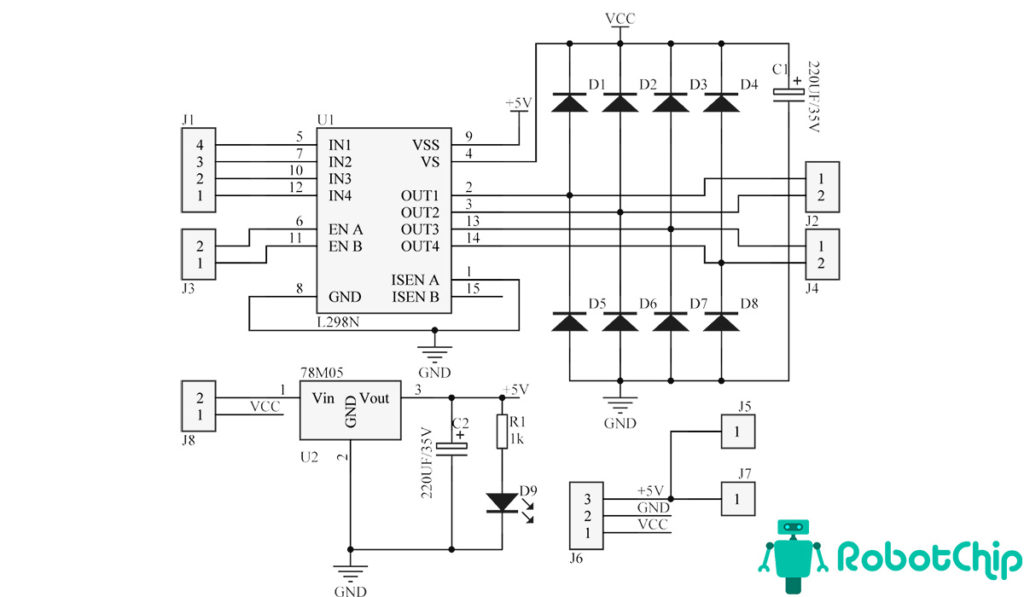
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.

Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.

Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены
. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
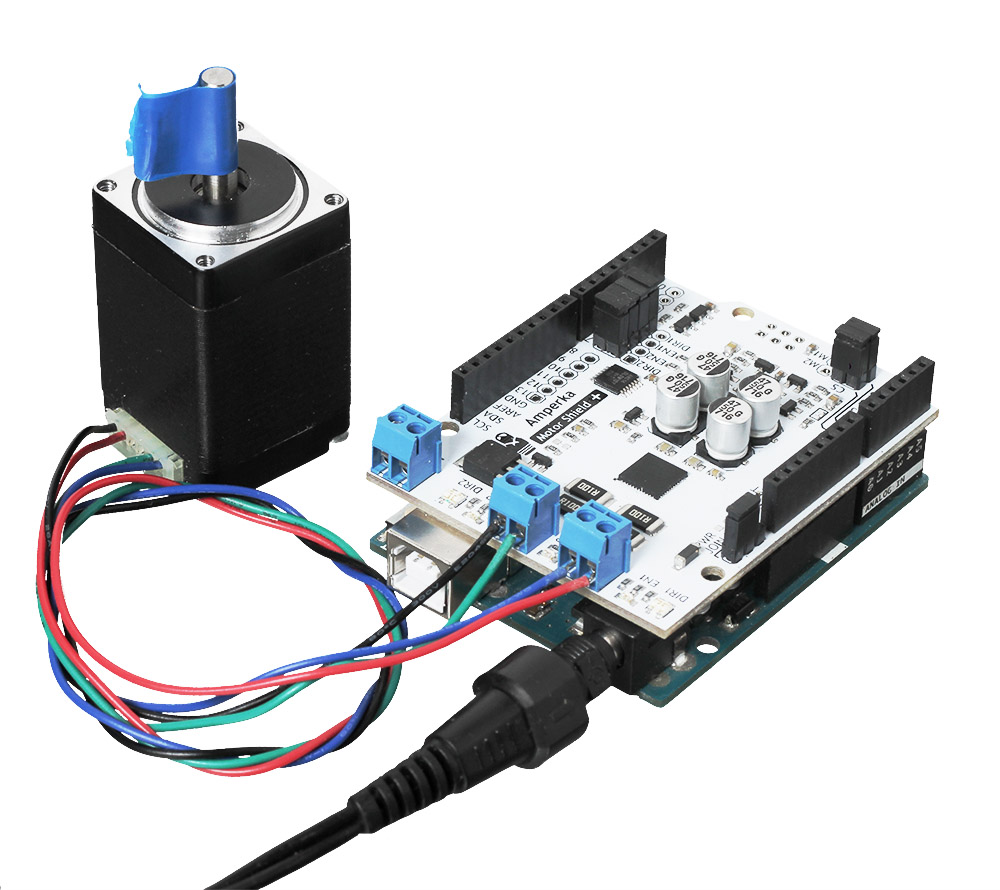
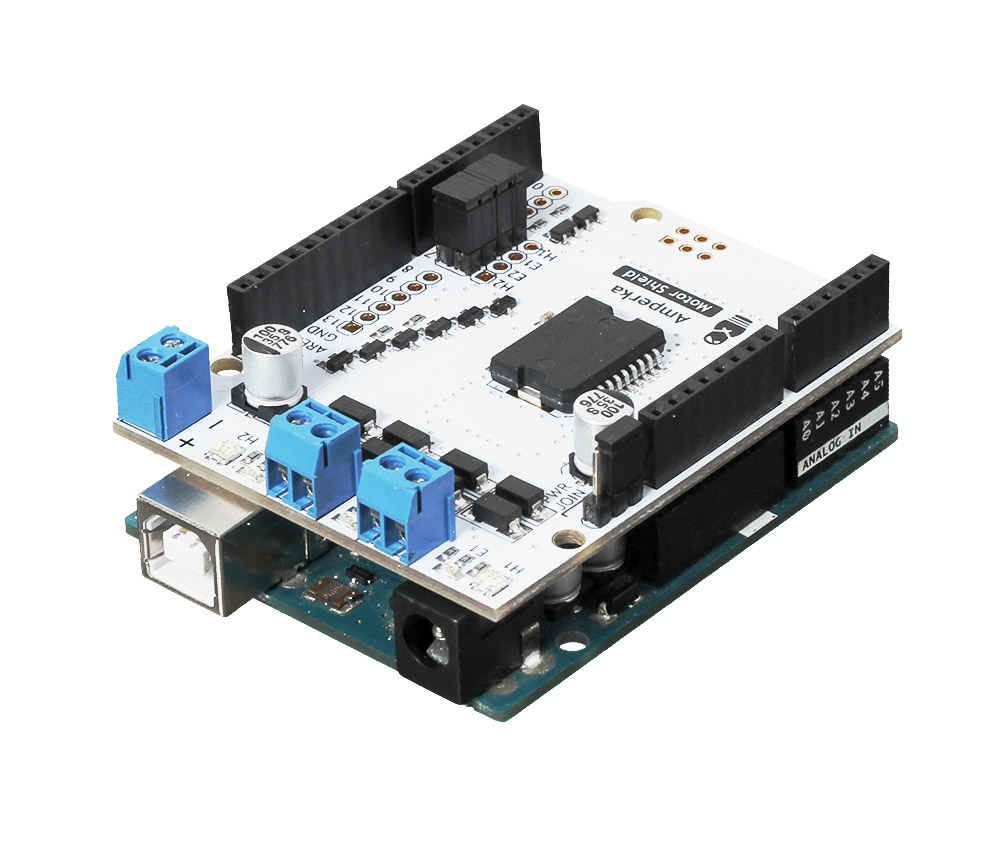
Motor Shield Plus — плата расширения для двухканального управления скоростью и направлением вращения коллекторных двигателей постоянного тока. Драйвер сможет управлять двумя моторами с напряжением 8–52 вольта и максимальным током до двух с половиной ампер на канал.
Видеообзор
Подключение и настройка

Если напряжение внешнего источника питания будет меньше 8 вольт, motor shield не заработает.
Примеры работы для Arduino
Управление коллекторными двигателями
Подключите два коллекторных мотора к клеммникам M1 и M2 соответственно.
Схема устройства

Код программы
Для начала покрутим каждый мотор в одну, а затем другую сторону.
Код программы
Усложним задачу. Будем плавно увеличивать скорость первого мотора до максимальной скорости, а потом понижать до полного выключения. Аналогично проделываем со вторым мотором.
Управление биполярным шаговым двигателем
Драйвер моторов может на себя также взять управления шаговым двигателем. В качестве примера подключим шаговый двигатель 42STH47-0406A.
Схема устройства

Управление без библиотек
Motor Shield поддерживает три режима управления биполярным шаговым двигателем:
Код программы
Протестируем по очереди три режима управления.
Скорость вращения шагового двигателя очень сильно влияет на развиваемый мотором момент. Убедитесь сами. Запустите этот же пример с разными значениями delayTime .
Обратите внимание, что двигатель в однофазном полношаговом режиме позволяет развить гораздо меньший момент, чем в двухфазном полношаговом режиме.
Управление через готовую библиотеку
Для лёгкого и быстрого управления шаговым двигателем мы написали библиотеку AmperkaStepper. Она скрывает в себе все тонкости работы с мотором и предоставляет удобные методы.
Пример работы в различных режимах
Пример работы для Espruino
Управление коллекторными двигателями
Подключите два коллекторных мотора к клеммникам M1 и M2 соответственно.
Схема устройства
Код программы
Для начала покрутим каждый мотор в одну, а затем другую сторону.
Код программы
Усложним задачу. Будем плавно увеличивать скорость первого мотора до максимальной скорости, а потом понижать до полного выключения. Аналогично проделываем со вторым мотором.
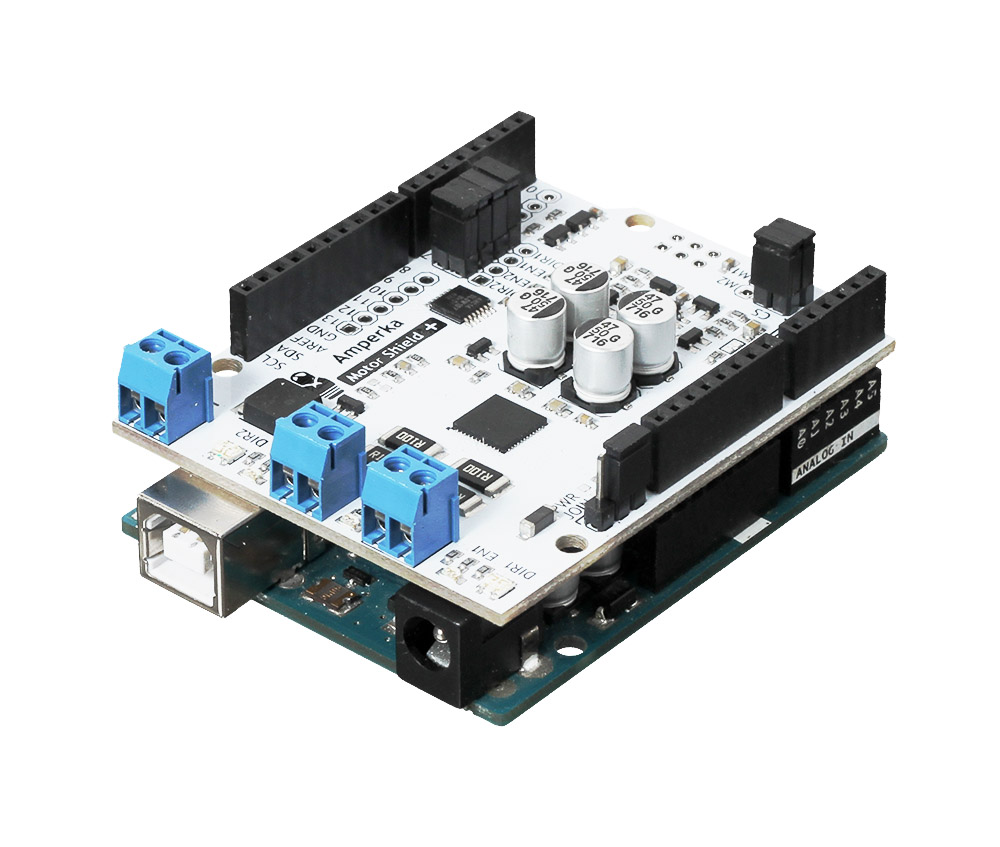
Элементы платы

Драйвер двигателей
Сердце и мускулы платы — микросхема двухканального H-моста на полевых транзисторах L6206Q

Термин «H-мост» появился благодаря графическому изображению схемы, напоминающему букву «H». H-мост состоит из четырёх ключей. В зависимости от текущего состояние переключателей возможно разное состояние мотора.
| S1 | S2 | S3 | S4 | Результат |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Мотор крутится вправо |
| 0 | 1 | 1 | 0 | Мотор крутится влево |
| 0 | 0 | 0 | 0 | Свободное вращение мотора |
| 0 | 1 | 0 | 1 | Мотор тормозится |
| 1 | 0 | 1 | 0 | Мотор тормозится |
| 1 | 1 | 0 | 0 | Короткое замыкание источника питания |
| 0 | 0 | 1 | 1 | Короткое замыкание источника питания |
Ключи меняем на транзисторы для регулировки скорости мотора с помощью ШИМ-сигнала.
H-мост с силовыми ключами — основная начинка микросхемы L6206Q для управления скоростью и направлением двигателей.
Питание
На плате расширения Motor Shield Plus два контура питания.
Силовой контур — напряжение для питания моторов от силовой части микросхемы H-моста L6206Q. При отсутствии питания на силовом контуре, светодиод PWR не горит. Цифровой контур — для питания вспомогательной цифровой логики управления микросхемой L6206Q и светодиодов индикации. Цифровое питание поступает на плату расширения от пина 5V управляющей платы. Если по какой-то причине напряжения на этом пине не оказалось, светодиоды индикации EN и DIR гореть не будут.Если отсутствует хотя бы один из контуров питания — Motor Shield работать не будет.
Силовое питание подключается через клеммник PWR . Диапазон входного напряжения:
При подключении питания соблюдайте полярность. Неправильное подключение может привести к непредсказуемому поведению или выходу из строя платы или источника питания.
Джампер объединения питания
Motor Shield использует два контура питания: силовое и цифровое. По умолчанию для питания всей конструкции необходимо два источника напряжения:
Питания для цифровой части с пина 5V управляющей платформы.При установки джампера в положение PWR JOIN , происходит объединение контакта Vin управляющей платформы и положительного контакта клеммника PWR . Режим объединённого питания позволяет запитывать управляющую платформу и силовую часть драйвера от одного источника питания.
При объединённом режиме напряжение может быть подано двумя способами:
При работе двигателей по цепи питания может проходить очень большой ток, на который цепь Vin управляющей платформы не рассчитана. Поэтому выбор для питания клеммника PWR предпочтительнее.
В режиме совместного питания управляющей платформы и Motor Shield Plus, используйте входное напряжение в диапазоне 8–12 вольт. Напряжение более 12 вольт убьёт управляющую платформу. Если вы хотите работать с Motor Shield в диапазоне 8–52 вольта, используйте два отдельных источника питания.
Источник питания должен быть способен обеспечить стабильное напряжение при резких скачках нагрузки. Даже кратковременная просадка напряжения может привести к перезагрузке управляющей платформы. В итоге программа начнётся сначала и поведения двигателей будет неадекватным.
При объединённом питании используйте литий-ионные и никель-металлгидридные аккумуляторы. Если вы используете другие источники питания, лучше воспользуйтесь раздельной схемой питания управляющей платформы и Motor Shield.
Нагрузка
Нагрузка разделена на два независимых канала. К каждому каналу можно подключить один коллекторный мотор. Первый канал на плате обозначен шёлком M1 , второй канал — M2 .
Обозначения «+» и «−» показывают воображаемые начало и конец обмотки. Если подключить два коллекторных двигателя, чтобы их одноимённые контакты щёточного узла соответствовали одному и тому же обозначению на плате, то при подаче на Motor Shield одинаковых управляющих импульсов, моторы будут вращаться в одну и ту же сторону.
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| PWR | Индикация состояния силового питания. Есть питание — светодиод горит, нет питания — не горит. |
| DIR1 | Индикация состояния направления первого канала M1 . При высоком логическом уровне светится зелёным светом, при низком — красным. |
| DIR2 | Индикация состояния направления второго канала M2 . При высоком логическом уровне светится зелёным светом, при низком — красным. |
| EN1 | Индикация скорости первого канала M1 . Яркость светодиода пропорциональна скорости вращения двигателя. |
| EN2 | Индикация скорости второго канала M2 . Яркость светодиода пропорциональна скорости вращения двигателя. |
Пины управления скоростью вращения двигателей
Для запуска двигателя на первом или втором канале установите высокий уровень на пинах скорости EN1 или EN2 соответственно. Для остановки моторов установите на соответствующих пинах низкий уровень.
Управление скоростью происходит при помощи ШИМ, за счёт быстрого включения и выключения нагрузки.
Пины управления направлением вращения двигателей
Пины направления H1 или H2 отвечают за направление вращения двигателей. Смена направления вращения коллекторных двигателей достигается за счёт изменения полярности приложенного к ним напряжения.
Если выставить на пин направления высокий уровень, то полярность напряжения на клеммниках нагрузки будет соответствовать обозначению «+» и «-» на плате. При подаче на пин низкого уровня, напряжение на клеммнике изменится на противоположное.Пины состояния текущего потребления тока
На пинах M1 и M2 присутствует напряжение прямо пропорционально потребляемому току на соответствующем канале.
Контакты выбора управляющих пинов
По умолчанию Motor Shield Plus для управления моторами и передачи данных о потребляемом токе на каждом канале использует пины управляющей платы:
| Назначение | Канал 1 | Канал 2 |
|---|---|---|
| Скорость EN | 5 | 6 |
| Направление DIR | 4 | 7 |
| Потребляемый ток M | A0 | A1 |
Если в вашем устройстве эти пины уже заняты, например используются для управления Relay Shield, вы можете использовать другой свободный пин.
Контакты отвечающие за направления — DIR1 и DIR2 можно заменять на любые другие пины. Контакты управляющие скоростью моторов — EN1 и EN2 , можно перебрасывать только на пины с поддержкой ШИМ. Контакты передачи данных о потребляемом токе — M1 и M2 , можно перебрасывать только на пины с поддержкой АЦП .
Для переброски пинов снимите джампер напротив занятого пина и припаяйте проводок между луженым отверстием рядом со снятым джампером и луженым отверстием напротив нужного пина. На этой картинке мы перекинули:
Хотите подключить мотор к Arduino или Iskra JS?! К сожалению микроконтроллер установленный на управляющих платформах не сможет без посторонней помощи управлять большой нагрузкой. Motor Shield поможет микроконтроллеру управлять коллекторными моторами и шаговыми двигателями.
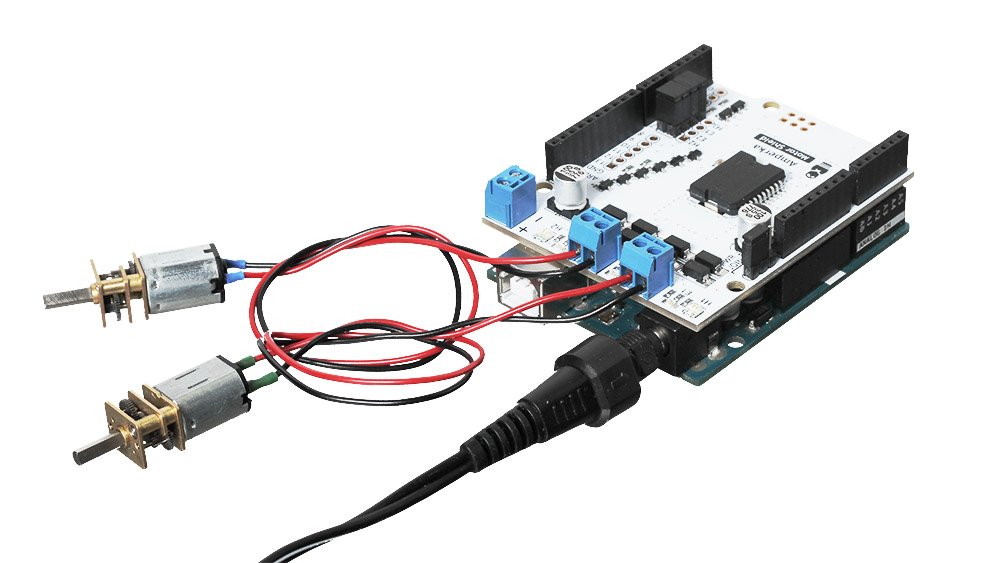
Motor Shield — это плата расширения, предназначенная для двухканального управления скоростью и направлением вращения коллекторных двигателей постоянного тока, напряжением 5–24 В и максимальным током до двух ампер на канал.
Плата расширения также сможет управлять одним биполярным шаговым двигателем.
Видеообзор
Подключение и настройка

Примеры работы для Arduino
Управление коллекторными двигателями
Подключите два коллекторных мотора к клеммникам M1 и M2 соответственно.
Схема устройства

Код программы
Для начала покрутим каждый мотор в одну, а затем другую сторону.
Код программы
Усложним задачу. Будем плавно увеличивать скорость первого мотора до максимальной скорости, а потом понижать до полного выключения. Аналогично проделываем со вторым мотором.
Управление биполярным шаговым двигателем
Драйвер моторов может на себя также взять управления шаговым двигателем. В качестве примера подключим шаговый двигатель 42STH47-0406A.
Схема устройства

Управление без библиотек
Motor Shield поддерживает три режима управления биполярным шаговым двигателем:
Код программы
Протестируем по очереди три режима управления.
Скорость вращения шагового двигателя очень сильно влияет на развиваемый мотором момент. Убедитесь сами. Запустите этот же пример с разными значениями delayTime .
Обратите внимание, что двигатель в однофазном полношаговом режиме позволяет развить гораздо меньший момент, чем в двухфазном полношаговом режиме.
Управление через готовую библиотеку
Для лёгкого и быстрого управления шаговым двигателем мы написали библиотеку AmperkaStepper. Она скрывает в себе все тонкости работы с мотором и предоставляет удобные методы.
Пример работы в различных режимах
Пример работы для Espruino
Управление коллекторными двигателями
Подключите два коллекторных мотора к клеммникам M1 и M2 соответственно.
Схема устройства
Код программы
Для начала покрутим каждый мотор в одну, а затем другую сторону.
Код программы
Усложним задачу. Будем плавно увеличивать скорость первого мотора до максимальной скорости, а потом понижать до полного выключения. Аналогично проделываем со вторым мотором.
Элементы платы

Драйвер двигателей
Сердце и мускулы платы — микросхема двухканального H-моста L298P.

Термин «H-мост» появился благодаря графическому изображению схемы, напоминающему букву «Н». H-мост состоит из четырёх ключей. В зависимости от текущего состояние переключателей возможно разное состояние мотора.
| S1 | S2 | S3 | S4 | Результат |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Мотор крутится вправо |
| 0 | 1 | 1 | 0 | Мотор крутится влево |
| 0 | 0 | 0 | 0 | Свободное вращение мотора |
| 0 | 1 | 0 | 1 | Мотор тормозит |
| 1 | 0 | 1 | 0 | Мотор тормозит |
| 1 | 1 | 0 | 0 | Короткое замыкание источника питания |
| 0 | 0 | 1 | 1 | Короткое замыкание источника питания |
Ключи меняем на транзисторы для регулировки скорости мотора с помощью ШИМ-сигнала.
H-мост с силовыми ключами — основная начинка микросхемы L298P для управления скоростью и направлением двигателей.
Питание
На плате расширения Motor Shield два контура питания.
Силовой контур — напряжение для питания моторов от силовой части микросхемы H-моста L298P. При отсутствии питания на силовом контуре, светодиод PWR не горит. Цифровой контур — для питания вспомогательной цифровой логики управления микросхемой L298P и светодиодов индикации. Цифровое питание поступает на плату расширения от пина 5V управляющей платы. Если по какой-то причине напряжения на этом пине не оказалось, светодиоды индикации гореть не будут.Если отсутствует хотя бы один из контуров питания — Motor Shield работать не будет.
Силовое питание подключается через клеммник PWR . Диапазон входного напряжения:
При подключении питания соблюдайте полярность. Неправильное подключение может привести к непредсказуемому поведению или выходу из строя платы или источника питания.
Джампер объединения питания
Motor Shield использует два контура питания: силовое и цифровое. По умолчанию для питания всей конструкции необходимо два источника напряжения:
Питания для цифровой части с пина 5V управляющей платформы.При установки джампера в положение PWR JOIN , происходит объединение контакта Vin управляющей платформы и положительного контакта клеммника PWR . Режим объединённого питания позволяет запитывать управляющую платформу и силовую часть драйвера от одного источника питания.
При объединённом режиме напряжение может быть подано двумя способами:
При работе двигателей по цепи питания может проходить очень большой ток, на который цепь Vin управляющей платформы не рассчитана. Поэтому выбор для питания клеммника PWR предпочтительнее.
В режиме совместного питания управляющей платформы и Motor Shield, используйте входное напряжение в диапазоне 7–12 вольт. Напряжение более 12 вольт убьёт управляющую платформу. Если вы хотите работать с Motor Shield в диапазоне 5–24 вольта, используйте два отдельных источника питания.
Источник питания должен быть способен обеспечить стабильное напряжение при резких скачках нагрузки. Даже кратковременная просадка напряжения может привести к перезагрузке управляющей платформы. В итоге программа начнётся сначала и поведения двигателей будет неадекватным.
При объединённом питании используйте литий-ионные и никель-металлгидридные аккумуляторы. Если вы используете другие источники питания, лучше воспользуйтесь раздельной схемой питания управляющей платформы и Motor Shield.
Нагрузка
Нагрузка разделена на два независимых канала. К каждому каналу можно подключить один коллекторный мотор. Первый канал на плате обозначен шёлком M1 , второй канал — M2 .
Обозначения «+» и «−» показывают воображаемые начало и конец обмотки. Если подключить два коллекторных двигателя, чтобы их одноимённые контакты щёточного узла соответствовали одному и тому же обозначению на плате, то при подаче на Motor Shield одинаковых управляющих импульсов, моторы будут вращаться в одну и ту же сторону.
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| PWR | Индикация состояния силового питания. Есть питание — светодиод горит, нет питания — не горит. |
| H1 | Индикация состояния направления первого канала M1 . При высоком логическом уровне светится зелёным светом, при низком — красным. |
| H2 | Индикация состояния направления второго канала M2 . При высоком логическом уровне светится зелёным светом, при низком — красным. |
| E1 | Индикация скорости первого канала M1 . Яркость светодиода пропорциональна скорости вращения двигателя. |
| E2 | Индикация скорости второго канала M2 . Яркость светодиода пропорциональна скорости вращения двигателя. |
Пины управления скоростью вращения двигателей
Для запуска двигателя на первом или втором канале установите высокий уровень на пинах скорости E1 или E2 соответственно. Для остановки моторов установите на соответствующих пинах низкий уровень.
Управление скоростью происходит при помощи ШИМ, за счёт быстрого включения и выключения нагрузки.
Пины управления направлением вращения двигателей
Пины направления H1 или H2 отвечают за направление вращения двигателей. Смена направления вращения коллекторных двигателей достигается за счёт изменения полярности приложенного к ним напряжения.
Если выставить на пин направления высокий уровень, то полярность напряжения на клеммниках нагрузки будет соответствовать обозначению «+» и «-» на плате. При подаче на пин низкого уровня, напряжение на клеммнике изменится на противоположное.Контакты выбора управляющих пинов
По умолчанию Motor Shield для управления скоростью и направлением вращения моторов использует пины управляющей платы:
| Назначение | Канал 1 | Канал 2 |
|---|---|---|
| Скорость | 5 | 6 |
| Направление | 4 | 7 |
Если в вашем устройстве эти пины уже заняты, например используются для управления Relay Shield), вы можете использовать другой свободный пин.
Контакты отвечающие за направления — H1 и H2 можно заменять на любые другие. А вот контакты управляющие скоростью моторов — E1 и E2 , можно перебрасывать только на пины с поддержкой ШИМ.

Для переброски пинов снимите джампер напротив занятого пина и припаяйте проводок между луженым отверстием рядом со снятым джампером и луженым отверстием напротив нужного пина. На этой картинке мы перекинули:

Одним из самых простых и недорогх способов управления двигателями постоянного тока является модуль L298N Motor Driver с Arduino. Он может контролировать скорость и направление вращения двух двигателей постоянного тока, а так же управлять биполярным шаговым двигателем (типа NEMA 17).
Технические параметры
► Напряжение питания логики модуля: 5 В
► Потребляемый ток встроенной логики: 36 мА
► Напряжение питания драйвера: 5 В – 35 В
► Рабочий ток драйвера: 2 А (пиковый ток 3 А)
► Габариты: 43.5 мм х 43.2мм х 29.4мм
Общие сведения
Основной чип модуля это микросхема L298N, состоящая из двух H-мост (H-Bridge), один для выхода A, второй для выхода B. H-мост широко используется в электронике и служит для изменения вращения двигателем, схема H-моста содержит четыре транзистора (ключа) с двигателем в центре, образуя H-подобную компоновку. Принцип работы прост, при одновременном закрытие двух отдельных транзистора изменяется полярность напряжения, приложенного к двигателю. Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.
Для управления скоростью двигателя постоянного тока используется метод PWM (Широтно-импульсной модуляции).
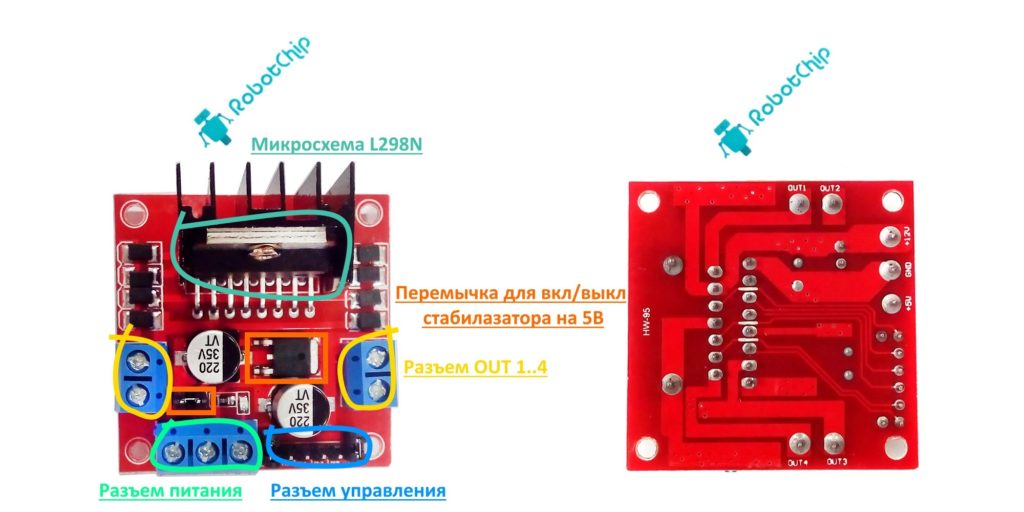
Модуль L298N содержит разъем для подключения питания, ряд перемычек для настройки модуля, два выхода A и B и разъем управления, которые регулируют скорость и направление вращения, назначение каждого можно ознакомится ниже:
Принципиальная схема модуля L298N
Внимание! Нельзя установить перемычку, если напряжение двигателя ниже 12 Вольт.

Падение напряжения L298N
Падение напряжения драйвера L298N составляет около 2 В, это связано с внутренним падением напряжения в транзисторах в цепи H-мосте. Таким образом, если мы подключим 12 В к источнику питания двигателя, то двигатели получат напряжение около 10 В. Это означает, что двигатель на 12 В не будет работать с максимальной скоростью, для получения максимальной скорости, напряжение поданное на двигателя должен быть выше напряжения (2 В), чем потребность в фактическом напряжении двигателя. Учитывая падение напряжения на 2 В, если вы используете двигатели 5 В, вам необходимо обеспечить питание 7 В. Если у вас 12-ваттные двигатели, то напряжение питания вашего двигателя должно составлять 14 В.
Управления скоростью
Разъемы управления скоростью ENA и ENB используются для включения и выключения управления скоростью двигателей. Когда перемычка установлена, двигатель вращается с максимальной скоростью. Если необходимо управлять скоростью двигателей, необходимо убрать перемычку и подключить выводы к контактам с поддержкой PWM на Arduino.
Подключение L298N к Arduino (коллекторный двигатель)
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер мотора на L298N (5-35V, 2A) x 1 шт.
► Коллекторный двигатель x 2 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Первым делом необходимо подключить источник питания 12B к двигателям, в примере используется распространенные двигатель постоянного тока, рассчитанные на 3B . . . 12B (применяемые в робототехнике). Учитывая внутреннее падение напряжения на микросхеме L298N, двигатели получат 10 В и будут вращаться не в полную силу.
Далее, нужно подключить 5 вольт на логическую схему L298N, для этого воспользуемся встроенным стабилизатором напряжения, который работает от источника питания двигателя, поэтому, перемычка EN должна быть установлена.
Теперь осталось подключить управляющие провода ENA, IN1, IN2, IN3, IN4 и ENB к шести цифровым выводам Arduino 9, 8, 7, 5, 4 и 3. Обратите внимание, что выводы Arduino 9 и 3 поддерживают ШИМ. Теперь, подключаем двигатели, один к клемме A (OUT1 & OUT2), а другой к клемме B (OUT3 & OUT4). Принципиальная схема подключения приведена ниже.
Читайте также: