
Драйверы высокого уровня для чего
Обновлено: 07.07.2024
Одной из неотъемлемых частей операционной системы Windows являются драйверы. В общем случае драйвер — это специальное программное обеспечение, которое обеспечивает работу внешних устройств, а также некоторой базовой функциональности операционной системы. Драйверы используются не только как механизм управления аппаратными устройствами, но и как составная часть прикладного программного обеспечения. В частности, к подобным решениям относятся различные виртуальные дисководы, технологии защиты от копирования, механизмы шифрования, антивирусное программное обеспечение и многое другое. Назначение драйвера — избавить разработчиков пользовательского программного обеспечения от рутинной реализации протоколов работы с оборудованием и предоставить дополнительный сервис и удобные средства по настройке и управлению устройствами. Таким образом, драйвер можно назвать интерфейсной «прослойкой» между «железом» и «софтом». С помощью драйвера клиентское приложение получает возможность управлять подключенным оборудованием.
Кольца защиты
Сначала давайте рассмотрим общие моменты, касающиеся взаимоотношений между операционной системой и драйверами, с точки зрения их последующего администрирования. Прежде всего стоит заметить, что, несмотря на то что драйвер — это обычная программа, в операционной системе Windows она исполняется особым образом и к ней предъявляются специфические требования. В основном это касается контекста работы драйверов — они в большинстве своем работают в нулевом кольце защиты процессора. В процессорах семейства х86 существует защитный механизм, условно называемый кольцами защиты или уровнями привилегий. Всего уровней привилегий четыре, нумеруются они от нулевого до третьего. Самый привилегированный — нулевой уровень. Операционная система Windows использует всего два уровня привилегий, нулевой и третий. Это связано с тем, что изначально система создавалась для нескольких процессоров, в частности для процессоров Alpha, у которых было всего два таких уровня. Конечно, было бы намного лучше, если бы операционная система использовала все эти уровни и располагала ядро на нулевом уровне привилегий, а все остальное — на других уровнях. Тогда код и данные ядра были бы защищены более надежно. К слову сказать, в будущей версии серверной операционной системы Microsoft Windows 2008, ранее известной как Longhorn, предусмотрены отдельные компоненты, использующие первый уровень привилегий. На нулевом уровне расположено ядро системы, ее управляющие структуры данных. Кроме того, здесь расположены драйверы. Именно по этой причине при написании драйверов нужно соблюдать осторожность и очень внимательно относиться к коду. Неверно написанный драйвер может повредить системные данные ядра или другие драйверы, что приведет к появлению «голубого экрана» BSOD. Этот режим в терминах Windows называется режимом ядра (kernel-mode). На третьем уровне привилегий расположены собственно пользовательские приложения. Стоит заметить, что из приложений, выполняющихся на третьем уровне привилегий, невозможно получить прямой доступ к памяти, находящейся в нулевом кольце. То есть нельзя ни читать, ни писать туда. Таким образом, уровень ядра аппаратно изолирован от приложений пользовательского уровня. Однако, обладая административными правами в системе, пользователь может установить драйвер, который загрузится в пространство ядра и получит полную власть над операционной системой. Поэтому всегда нужно следить за тем, что и как устанавливают приложения. Кроме того, работая с административными привилегиями, вы подвергаете свою систему риску, поскольку любое приложение может без вашего ведома установить в систему вредоносный драйвер, а вы даже не узнаете об этом. Чтобы этого избежать, в Windows Vista применяется механизм UAC. Этот режим в терминах Windows называется пользовательским (user-mode).
Процесс загрузки
Следующим немаловажным элементом взаимодействия между системой и драйверами является порядок их загрузки. С этой точки зрения драйверы можно разделить на загружаемые в процессе запуска операционной системы, так называемые драйверы этапа BOOT-START, и загружаемые после старта ядра драйверы этапа SYSTEM-START. BOOT-START. Эти драйверы необходимы для процесса загрузки и инициализации операционной системы. К таким драйверам, например, относятся драйверы файловых систем и драйверы шин. Эти драйверы загружаются в память загрузчиком до запуска ядра операционной системы. Сначала загрузчик читает ветвь реестра SYSTEM. В этой ветви осуществляется поиск драйверов, имеющих значение START, равное нулю, что означает SERVICE_BOOT_START. Эти драйверы загружаются, а инициализирует их диспетчер ввода/вывода после старта ядра. SYSTEM-START. Эти драйверы загружаются и инициализируются PnP-менеджером (см. врезку «PnP-менеджер») после того, как будут инициализированы драйверы этапа boot-start и построено дерево устройств. Кроме того, после инициализации драйверов устройств PnP-менеджер загружает и инициализирует драйверы, помеченные как SYSTEM-START, но до сих пор не загруженные. Эти драйверы не относятся к каким-либо устройствам или создают неперечисляемые в дереве устройств элементы.
В большинстве случаев используется следующая классификация высоковольтных драйверов:
- Независимые драйверы верхнего и драйверы нижнего плеча полумоста, интегрированные в одной микросхеме (High and Low Side Driver);
- Драйверы верхнего и драйверы нижнего плеча, включенные по схеме полумоста (Half-Bridge Driver);
- Драйверы верхнего плеча (High Side Driver);
- Драйверы нижнего плеча (Low Side Driver).
На рис. 1 показаны соответствующие этим типам драйверов схемы управления.
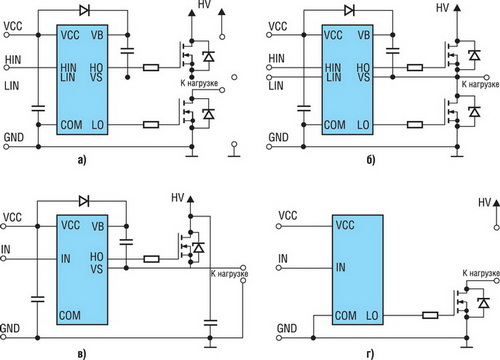
Рис. 1. Упрощенные схемы управления MOSFET- и IGBT-транзисторами
В первом случае (рис. 1а) управление двумя независимыми нагрузками осуществляется от единых управляющих сигналов. Нагрузки, соответственно, включаются между истоком нижнего транзистора и шиной высоковольтного питания (драйвер нижнего плеча), а также между стоком верхнего транзистора и землей (драйвер верхнего плеча). Так называемые средние точки (сток верхнего транзистора и исток нижнего транзистора) не соединены между собой.
Во втором случае (рис. 1б) средние точки соединены. Причем нагрузка может быть включена как на верхнее, так и на нижнее плечо, но подключена к средней точке аналогично полумостовой схеме (т.н. полная мостовая схема). Строго говоря, в схеме 1а ничто не мешает соединить средние точки. Но в этом случае при определенной комбинации входных сигналов возможно одновременное открытие сразу двух транзисторов и, соответственно, протекание чрезмерно большого тока от высоковольтной шины на землю, что приведет к выходу из строя одного или сразу обоих транзисторов. Исключение подобной ситуации в данной схеме является заботой разработчика. В полумостовых драйверах (схема 1б) подобная ситуация исключается на уровне внутренней логики управления микросхемы.
Семейство высоковольтных драйверов
L368x
В таблице 1 приводятся состав и параметры микросхем семейства L368x. Микросхемы данного семейства включают в себя как независимые драйверы верхнего и нижнего плеча (H&L), так и драйверы полумостовой схемы (HB).
Таблица 1. Параметры драйверов семейства L638x
| Наименование | Voffcet, В | Io+, мА | Io-, мА | Ton, нс | Toff, нс | Tdt, нс | Тип | Управление |
|---|---|---|---|---|---|---|---|---|
| L6384E | 600 | 400 | 650 | 200 | 250 | Prog. | HB | IN/-SD |
| L6385E | 600 | 400 | 650 | 110 | 105 | H&L | HIN/LIN | |
| L6386E | 600 | 400 | 650 | 110 | 150 | H&L | HIN/LIN/-SD | |
| L6387E | 600 | 400 | 650 | 110 | 105 | H&L | HIN/LIN | |
| L6388E | 600 | 200 | 350 | 750 | 250 | 320 | HB | HIN/LIN |
Поясним некоторые параметры:
Управление. Микросхемы независимых драйверов верхнего и нижнего плеча управляются по входам HIN и LIN. Причем высокий уровень логического сигнала включает, соответственно, верхнее или нижнее плечо драйвера. В микросхеме L6386E помимо этого используется дополнительный вход SD, отключающий оба плеча независимо от состояния на входах HIN и LIN.
В микросхеме L6384E применяются сигналы SD и IN. Сигнал SD отключает оба плеча независимо от состояния на входе IN. Сигнал IN = 1 эквивалентен комбинации сигналов и, наоборот, IN = 0 эквивалентен комбинации сигналов . Таким образом, одновременное включение транзисторов верхнего и нижнего плеча невозможно в принципе.
В микросхеме L6388E управление осуществляется по входам HIN и LIN, поэтому принципиально возможно подать на входы комбинацию , однако внутренняя логическая схема преобразует ее в комбинацию , исключив, таким образом, одновременное включение обоих транзисторов.
Что касается параметров, начнем с микросхем типа H&L.
Значение VOFFSET, равное 600 Вольт, является в каком-то смысле стандартом для микросхем данного класса.
Значение выходного тока IO+ (IO-), равное 400/650 мА, является показателем средним, ориентированным на типовые транзисторы общего назначения. Если сравнивать с микросхемами семейства IRS (поколение G5 HVIC), то компания International Rectifier предлагает, главным образом, микросхемы с параметром 290/600 мА. Однако в линейке International Rectifier есть также модели с параметрами 2500/2500 мА (IRS2113) и несколько меньшим быстродействием или микросхемы с выходными токами до 4000/4000 мА (IRS2186). Правда, в этом случае время переключения по сравнению с L6385E увеличивается до значения 170/170 нс.
Время переключения. Значения TON (TOFF), равные 110/105 нс (для L6385E), превышают аналогичные значения микросхем семейства IRS (пусть и не очень значительно). Лучших показателей (60/60 нс) компания International Rectifier добилась в модели IRS2011, но за счет снижения напряжения VOFFSET до 200 В.
Сравнивая параметры драйвера полумостовой схемы L6384E с изделиями International Rectifier, можно сделать вывод, что он уступает (и по выходным токам, и по быстродействию) только модели IRS21834, в которой реализована входная логика HIN/-LIN. Если критичной является входная логика IN/-SD, то драйвер L6384E превосходит по своим параметрам изделия International Rectifier.
Более подробно рассмотрим микросхему драйвера L6385E, структура и схема включения которой приведена на рис. 2.
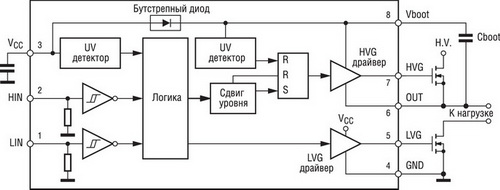
Рис. 2. Структура и схема включения L6385E
Микросхема содержит два независимых драйвера верхнего (выход HVG) и нижнего плеча (выход LVG). Реализация драйвера нижнего плеча достаточно тривиальна, поскольку потенциал на выводе GND постоянен и, следовательно, задача состоит в преобразовании входного низковольтного логического сигнала LIN до уровня напряжения на выходе LVG, необходимого для открытия транзистора нижнего плеча. В верхнем плече потенциал на выводе OUT изменяется в зависимости от состояния нижнего транзистора. Существуют различные схемотехнические решения, применяемые для построения каскада верхнего плеча. В данном случае применяется относительно простая и недорогая бутстрепная схема управления (схема с «плавающим» источником питания). В такой схеме длительность управляющего импульса ограничена величиной бутстрепной емкости. Кроме того, необходимо обеспечить условия для ее постоянного заряда с помощью высоковольтного быстродействующего каскада сдвига уровня. Этот каскад обеспечивает преобразование логических сигналов до уровней, необходимых для устойчивой работы схемы управления транзистора верхнего плеча.
Для современных высоковольтных драйверов характерна тенденция интегрировать бутстрепный диод в корпус интегральной схемы. Благодаря этому отпадает необходимость в применении внешнего диода, который является достаточно громоздким по сравнению с самой микросхемой драйвера. Встроенный бутстрепный диод (точнее, бутстрепная схема) применен не только в драйвере L6385E, но и во всех остальных микросхемах этого семейства.
Микросхема L6386E является вариантом L6385E с дополнительными функциями. Ее структура и схема включения приведены на рис. 3.

Рис. 3. Структура и схема включения L6386E
Основные отличия L6386E от L6385E. Во-первых, добавлен дополнительный вход SD, низкий уровень сигнала на котором выключает оба транзистора независимо от состояния входов HIN и LIN. Часто используется как сигнал аварийного отключения, не связанный со схемой формирования входных управляющих сигналов. Во-вторых, добавлен каскад контроля тока, протекающего через транзистор нижнего каскада. Сравнивая с предыдущей схемой, видим, что сток транзистора нижнего плеча подключен к земле не непосредственно, а через токовый резистор (токовый датчик). Если падение напряжения на нем превышает пороговое значение VREF, то на выходе DIAG формируется низкий уровень. Отметим, что данное состояние не влияет на работу схемы, а является только индикатором.
Несколько слов о применении микросхем семейства L638x. Ограниченный объем статьи не позволяет рассмотреть примеры применения, однако в документе «L638xE Application Guide» компании STMicroelectronics [1] приведены примеры схемы управления трехфазным двигателем, схемы балласта люминесцентной лампы с диммированием, DC/DC-преобразователей с различной архитектурой и ряд других. Также приведены схемы демонстрационных плат для всех микросхем данного семейства (в том числе и топология печатных плат).
Подводя итог анализа семейства L638x, отметим: не обладая уникальными характеристиками по каким-то отдельным параметрам, драйверы данного семейства относятся к одним из лучших в отрасли как по совокупности параметров, так и по примененным техническим решениям.
Семейство высоковольтных драйверов
полумостовой схемы L639x
На первый взгляд, микросхемы этого семейства можно считать развитием микросхемы L6384E. Однако анализируя функциональные возможности драйверов семейства L639x, признать L6384E в качестве прототипа весьма сложно (разве что за отсутствием других драйверов полумоста в линейке STMicroelectronics). В таблице 2 приводятся состав и параметры микросхем семейства L639x.
Таблица 2. Параметры драйверов семейства L639x
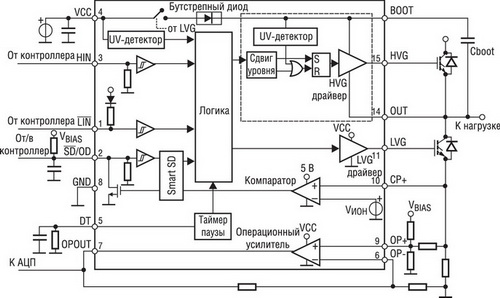
Рис. 4. Структура и схема включения L6390
Все микросхемы содержат логику защиты от одновременного открытия транзисторов верхнего и нижнего плеча и, соответственно, формирования паузы при изменении состояния выхода. Время паузы TDT для всех микросхем семейства программируемое и определяется номиналом резистора, подключенного к выводу DT.
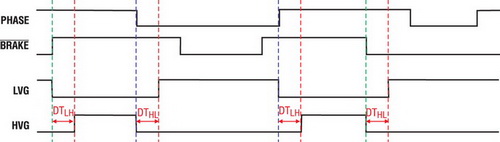
Рис. 5. Циклограмма управления логики PHASE/BRAKE/SD
На рис. 6 показана структура и схема включения микросхемы L6393.
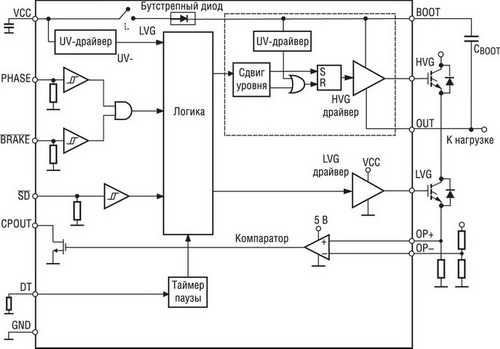
Рис. 6. Структура и схема включения L6393
О параметрах. Значения выходных токов IO+ (IO-), равные 270/430 мА, уступают микросхемам компании International Rectifier (у которых, как отмечалось выше, типичными являются 290/600 мА). Тем не менее, динамические параметры TON/TOFF (125/125 нс) превосходят (и часто существенно) все микросхемы семейства IRS.
Выводы по семейству L639x. При достаточно высоких количественных характеристиках, что само по себе позволяет отнести семейство L639x к группе лидеров отрасли, дополнительные функции придают качественный скачок, поскольку позволяют реализовать в одной микросхеме те функции, которые ранее реализовывались с использованием ряда дополнительных компонентов.
Заключение
Безусловно, номенклатуру высоковольтных драйверов компании STMicroelectronics нельзя признать очень широкой (хотя бы в сравнении с аналогичными изделиями компании International Rectifier). Тем не менее, количественные и качественные характеристики рассмотренных семейств не уступают лучшим изделиям IR.
Говоря о драйверах MOSFET- и IGBT-транзисторов, нельзя не упомянуть и сами транзисторы; компания STMicroelectronics выпускает достаточно широкую линейку полевых (например MDMESH V и SuperMesh3) и биполярных транзисторов с изолированным затвором. Поскольку эти электронные компоненты совсем недавно освещались в данном журнале [2, 3, 4], то они оставлены за рамками данной статьи.
Литература
1. L638xE Application Guide// документ компании ST Microelectronics an5641.pdf.
MDMEDH V в корпусе PowerFlat


Во-первых, в данном переводе могут быть серьёзные проблемы с переводом терминов, я не занимался электротехникой и схемотехникой достаточно, но всё же что-то знаю; также я пытался перевести всё максимально понятно, поэтому не использовал такие понятия, как бутсрепный, МОП-транзистор и т.п. Во-вторых, если орфографически сейчас уже сложно сделать ошибку (хвала текстовым процессорам с указанием ошибок), то ошибку в пунктуации сделать довольно-таки просто.
И вот по этим двум пунктам прошу пинать меня в комментариях как можно сильнее.
Теперь поговорим уже больше о теме статьи — при всём многообразии статей о построении различных транспортных средств наземного вида (машинок) на МК, на Arduino, на <вставить название>, само проектирование схемы, а тем более схемы подключения двигателя не описывается достаточно подробно. Обычно это выглядит так:
— берём двигатель
— берём компоненты
— подсоединяем компоненты и двигатель
— …
— PROFIT!1!
Но для построения более сложных схем, чем для простого кручения моторчика с ШИМ в одну сторону через L239x, обычно требуется знание о полных мостах (или H-мостах), о полевых транзисторах (или MOSFET), ну и о драйверах для них. Если ничто не ограничивает, то можно использовать для полного моста p-канальные и n-канальные транзисторы, но если двигатель достаточно мощный, то p-канальные транзисторы придётся сначала обвешивать большим количеством радиаторов, потом добавлять кулеры, ну а если совсем их жалко выкидывать, то можно попробовать и другие виды охлаждения, либо просто использовать в схеме лишь n-канальные транзисторы. Но с n-канальными транзисторами есть небольшая проблема — открыть их «по-хорошему» подчас бывает довольно сложно.
Поэтому я искал что-нибудь, что мне поможет с составлением правильной схемы, и я нашёл статью в блоге одного молодого человека, которого зовут Syed Tahmid Mahbub. Этой статьёй я и решил поделится.
Во многих ситуациях мы должны использовать полевые транзисторы как ключи верхнего уровня. Также во многих ситуациях мы должны использовать полевые транзисторы как ключи как и верхнего, так и нижнего уровней. Например, в мостовых схемах. В неполных мостовых схемах у нас есть 1 MOSFET верхнего уровня и 1 MOSFET нижнего уровня. В полных мостовых схемах мы имеем 2 MOSFETа верхнего уровня и 2 MOSFETа нижнего уровня. В таких ситуациях нам понадобится использовать драйвера как высокого, так и низкого уровней вместе. Наиболее распространённым способом управления полевыми транзисторами в таких случаях является использование драйвера ключей нижнего и верхнего уровней для MOSFET. Несомненно, самым популярным микросхемой-драйвером является IR2110. И в этой статье/учебнике я буду говорить о именно о нём.
Давайте для начала взглянем на блок-схему, а также описание и расположение контактов:

Рисунок 1 — Функциональная блок-схема IR2110

Рисунок 2 — Распиновка IR2110

Рисунок 3 — Описание пинов IR2110
Также стоит упомянуть, что IR2110 выпускается в двух корпусах — в виде 14-контактного PDIP для выводного монтажа и 16-контактного SOIC для поверхностного монтажа.
Теперь поговорим о различных контактах.
VCC — это питание нижнего уровня, должно быть между 10В и 20В. VDD — это логическое питание для IR2110, оно должно быть между +3В и +20В (по отношению к VSS). Фактическое напряжение, которое вы выберете для использования, зависит от уровня напряжения входных сигналов. Вот график:

Рисунок 4 — Зависимость логической 1 от питания
Обычно используется VDD равное +5В. При VDD = +5В, входной порог логической 1 немного выше, чем 3В. Таким образом, когда напряжение VDD = +5В, IR2110 может быть использован для управления нагрузкой, когда вход «1» выше, чем 3 (сколько-то) вольт. Это означает, что IR2110 может быть использован почти для всех схем, так как большинство схем, как правило, имеют питание примерно 5В. Когда вы используете микроконтроллеры, выходное напряжение будет выше, чем 4В (ведь микроконтроллер довольно часто имеет VDD = +5В). Когда используется SG3525 или TL494 или другой ШИМ-контроллер, то, вероятно, придётся их запитывать напряжением большим, чем 10В, значит на выходах будет больше, чем 8В, при логической единице. Таким образом, IR2110 может быть использован практически везде.
Вы также можете снизить VDD примерно до +4В, если используете микроконтроллер или любой чип, который даёт на выходе 3.3В (например, dsPIC33). При проектировании схем с IR2110, я заметил, что иногда схема не работает должным образом, когда VDD у IR2110 был выбран менее + 4В. Поэтому я не рекомендую использовать VDD ниже +4В. В большинстве моих схем уровни сигнала не имеют напряжение меньше, чем 4В как «1», и поэтому я использую VDD = +5V.
Если по каким-либо причинам в схеме уровень сигнала логической «1» имеет напряжение меньшее, чем 3В, то вам нужно использовать преобразователь уровней/транслятор уровней, он будет поднимать напряжение до приемлемых пределов. В таких ситуациях я рекомендую повышение до 4В или 5В и использование у IR2110 VDD = +5В.
Теперь давайте поговорим о VSS и COM. VSS это земля для логики. COM это «возврат низкого уровня» — в основном, заземление низкого уровня драйвера. Это может выглядеть так, что они являются независимыми, и можно подумать что, пожалуй, было бы возможно изолировать выходы драйвера и сигнальную логику драйвера. Тем не менее, это было бы неправильно. Несмотря на то что внутренне они не связаны, IR2110 является неизолированным драйвером, и это означает, что VSS и COM должны быть оба подключены к земле.
HIN и LIN это логические входы. Высокий сигнал на HIN означает, что мы хотим управлять верхним ключом, то есть на HO осуществляется вывод высокого уровня. Низкий сигнал на HIN означает, что мы хотим отключить MOSFET верхнего уровня, то есть на HO осуществляется вывод низкого уровня. Выход в HO, высокий или низкий, считается не по отношению к земле, а по отношению к VS. Мы скоро увидим, как усилительные схемы (диод + конденсатор), используя VCC, VB и VS, обеспечивают плавающее питания для управления MOSFETом. VS это плавающий возврат питания. При высоком уровне, уровень на HO равен уровню на VB, по отношению к VS. При низком уровне, уровень на HO равнен VS, по отношению к VS, фактически нулю.
Высокий сигнал LIN означает, что мы хотим управлять нижним ключом, то есть на LO осуществляется вывод высокого уровня. Низкий сигнал LIN означает, что мы хотим отключить MOSFET нижнего уровня, то есть на LO осуществляется вывод низкого уровня. Выход в LO считается относительно земли. Когда сигнал высокий, уровень в LO такой же как и в VCC, относительно VSS, фактически земля. Когда сигнал низкий, уровень в LO такой же как и в VSS, относительно VSS, фактически нуль.
SD используется в качестве контроля останова. Когда уровень низкий, IR2110 включен — функция останова отключена. Когда этот вывод является высоким, выходы выключены, отключая управление IR2110.
Теперь давайте взглянем на частые конфигурации с IR2110 для управления MOSFETами как верхних и нижних ключей — на полумостовые схемы.

Рисунок 5 — Базовая схема на IR2110 для управления полумостом
D1, C1 и C2 совместно с IR2110 формируют усилительную цепь. Когда LIN = 1 и Q2 включен, то C1 и С2 заряжаются до уровня VB, так как один диод расположен ниже +VCC. Когда LIN = 0 и HIN = 1, заряд на C1 и С2 используется для добавления дополнительного напряжения, VB в данном случае, выше уровня источника Q1 для управления Q1 в конфигурации верхнего ключа. Достаточно большая ёмкость должна быть выбрана у C1 для того чтобы её хватило для обеспечения необходимого заряда для Q1, чтобы Q1 был включён всё это время. C1 также не должен иметь слишком большую ёмкость, так как процесс заряда будет проходить долго и уровень напряжения не будет увеличиваться в достаточной степени чтобы сохранить MOSFET включённым. Чем большее время требуется во включённом состоянии, тем большая требуется ёмкость. Таким образом меньшая частота требует большую ёмкость C1. Больший коэффициент заполнения требует большую ёмкость C1. Конечно есть формулы для расчёта ёмкости, но для этого нужно знать множество параметров, а некоторые из них мы может не знать, например ток утечки конденсатора. Поэтому я просто оценил примерную ёмкость. Для низких частот, таких как 50Гц, я использую ёмкость от 47мкФ до 68мкФ. Для высоких частот, таких как 30-50кГц, я использую ёмкость от 4.7мкФ до 22мкФ. Так как мы используем электролитический конденсатор, то керамический конденсатор должен быть использован параллельно с этим конденсатором. Керамический конденсатор не обязателен, если усилительный конденсатор — танталовый.
D2 и D3 разряжают затвор MOSFETов быстро, минуя затворные резисторы и уменьшая время отключения. R1 и R2 это токоограничивающие затворные резисторы.
+MOSV может быть максимум 500В.
+VCC должен идти с источника без помех. Вы должны установить фильтрующие и развязочные конденсаторы от +VCC к земле для фильтрации.
Давайте теперь рассмотрим несколько примеров схем с IR2110.

Рисунок 6 — Схема с IR2110 для высоковольтного полумоста

Рисунок 7 — Схема с IR2110 для высоковольтного полного моста с независимым управлением ключами (кликабельно)
На рисунке 7 мы видим IR2110, использованный для управления полным мостом. В ней нет ничего сложного и, я думаю, уже сейчас вы это понимаете. Также тут можно применить достаточно популярное упрощение: HIN1 мы соединяем с LIN2, а HIN2 мы соединяем с LIN1, тем самым мы получаем управление всеми 4 ключами используя всего 2 входных сигнала, вместо 4, это показано на рисунке 8.

Рисунок 8 — Схема с IR2110 для высоковольтного полного моста с управлением ключами двумя входами (кликабельно)

Рисунок 9 — Схема с IR2110 как высоковольтного драйвера верхнего уровня
На рисунке 9 мы видим IR2110 использованный как драйвер верхнего уровня. Схема достаточно проста и имеет такую же функциональность как было описано выше. Есть вещь которую нужно учесть — так как мы больше не имеем ключа нижнего уровня, то должна быть нагрузка подключённая с OUT на землю. Иначе усилительный конденсатор не сможет зарядится.

Рисунок 10 — Схема с IR2110 как драйвера нижнего уровня

Рисунок 11 — Схема с IR2110 как двойного драйвера нижнего уровня
Я видел как на многих форумах, люди бьются с проектированием схем на IR2110. У меня тоже было много трудностей прежде чем я cмог уверенно и последовательно строить успешные схемы драйвера на IR2110. Я попытался объяснить применение и использование IR2110 довольно тщательно, попутно всё объясняя и используя большое количество примеров, и я надеюсь, что это поможет вам в ваших начинаниях с IR2110.
Драйверы различаются по возможностям, которые они предоставляют, а также по тому, каким образом обеспечивается к ним доступ и управление. Можно рассматривать три основные типа драйверов:
Символьные драйверы Этот тип драйверов обеспечивает работу с устройствами с побайтовым доступом и обменом данными. К таким устройствам можно отнести модемы, терминалы, принтеры, манипуляторы мышь и т.д. Доступ к таким драйверам не включает использование буферного кэша, таким образом ввод и вывод как правило не буферизуется. При необходимости буферизации для символьных драйверов обычно используется подход, основанный на структурах данных, называемых clist. Блочные драйверы Этот тип драйверов позволяет производить обмен данными с устройством фиксированными порциями (блоками). Например, для жесткого диска данные можно адресовать и, соответственно, читать только секторами, размер которых составляет несколько сотен байтов. Для блочных драйверов обычно используется буферный кэш, который и является интерфейсом между файловой системой и устройством. Хотя операции чтения и записи для процесса допускают обмен данными, размер которых меньше размера блока, на системном уровне это все равно приводит к считыванию всего блока, изменению части его данных и записи измененного блока обратно на диск. Драйверы низкого уровня (raw drivers) Этот тип интерфейса блочных драйверов позволяет производить обмен данными с блочными устройствами, минуя буферный кэш. Это, в частности, означает, что устройство может быть адресовано элементами, размер которых не совпадает с размером блока. Обмен данными происходит независимо от файловой подсистемы и буферного кэша, что позволяет ядру производить передачу непосредственно между пользовательским процессом и устройством, без дополнительного копирования.
На рис. 5.1 приведена упрощенная схема взаимодействия драйверов устройств с другими подсистемами операционной системы UNIX.

Рис. 5.1. Драйверы устройств UNIX
Не все драйверы служат для работы с физическими устройствами, такими как сетевой адаптер, последовательный порт или монитор. Часть драйверов служат для предоставления различных услуг ядра прикладным процессам и не имеют непосредственного отношения к аппаратной части компьютера. Такие драйверы называются программными или драйверами псевдоустройств. Можно привести несколько примеров псевдоустройств и соответствующих им программных драйверов:
Данный текст является ознакомительным фрагментом.
Продолжение на ЛитРес
Типы драйверов
Типы драйверов Драйверы различаются по возможностям, которые они предоставляют, а также по тому, каким образом обеспечивается к ним доступ и управление. Можно рассматривать три основные типа драйверов: Символьные драйверы Этот тип драйверов обеспечивает работу с
Базовая архитектура драйверов
Базовая архитектура драйверов Драйвер устройства адресуется старшим номером (major number) устройства. Напомним, что среди атрибутов специальных файлов устройств, которые обеспечивают пользовательский интерфейс доступа к периферии компьютера, это число присутствует наряду
Встраивание драйверов в ядро
Встраивание драйверов в ядро Драйвер устройства является частью кода ядра операционной системы и обеспечивает взаимодействие других подсистем UNIX с физическими или псевдоустройствами. Существует два основных метода встраивания кода и данных драйвера в ядро
Загрузка сетевых драйверов
Загрузка сетевых драйверов Первым шагом в настройке сетевых устройств является загрузка соответствующих драйверов. Как было сказано в главе 1, драйверы подготавливаются к работе одним из двух способов: драйвер может быть непосредственно включен в состав ядра Linux либо
Установка драйверов
Установка драйверов Если вы думаете, что сразу же после установки Windows вы можете начинать работу – вы крупно ошибаетесь. И когда после многочисленных перезагрузок и настроек ваши глаза узреют ласковый пейзаж Рабочего стола Windows – не спешите устанавливать программы. Пока
2.6 Отладка драйверов
2.6 Отладка драйверов Разговор о драйверах был бы неполным, если не упомянуть об отладке драйверов. Т.к. драйвера работают в нулевом кольце защиты процессора со всеми вытекающими последствиями, то обыкновенные отладчики пользовательских приложений не пригодны для
Типы, характеризуемые значениями, ссылочные типы и оператор присваивания
Типы, характеризуемые значениями, ссылочные типы и оператор присваивания Теперь изучите следующий метод Main() и рассмотрите его вывод, показанный на рис. 3.12.static void Main(string[] args) < Console.WriteLine("*** Типы, характеризуемые значением / Ссылочные типы ***"); Console.WriteLine(-› Создание p1"); MyPoint
Типы, характеризуемые значениями и содержащие ссылочные типы
Типы, характеризуемые значениями и содержащие ссылочные типы Теперь, когда вы чувствуете разницу между типами, характеризуемыми значением, и ссылочными типами, давайте рассмотрим более сложный пример. Предположим, что имеется следующий ссылочный тип (класс),
Типы, характеризуемые значениями, и ссылочные типы: заключительные замечания
Типы, характеризуемые значениями, и ссылочные типы: заключительные замечания Чтобы завершить обсуждение данной темы, изучите информацию табл. 3.8, в которой приводится краткая сводка основных отличий между типами, характеризуемыми значением, и ссылочными типами.Таблица
Настройки поиска драйверов
Настройки поиска драйверов Часть этих параметров, предназначенная для ограничения мест, откуда можно установить драйвер, имеет тип REG_DWORD и расположена в ветви реестра HKEY_CURRENT_USERSoftwarePoliciesMicrosoftWindowsDriverSearching:• DontPromptForWindowsUpdate – если значение данного параметра равно 1, то будет
Процесс установки драйверов
Процесс установки драйверов Еще одна часть параметров также имеет тип REG_DWORD, но расположена в ветви HKEY_LOCAL_MACHINESOFTWAREPoliciesMicrosoftWindowsDeviceInstallSettings. Эти параметры влияют на процесс установки драйверов устройств.• InstallTimeout – определяет максимально возможное время установки
Ошибки драйверов
Ошибки драйверов Пожалуй, одной из главных причин, приводящей к нестабильности работы Windows ХР, является недостаточно продуманное и небезопасное использование драйверов установленных и подключенных устройств. Чаще всего это касается драйверов принтера и
Ошибки драйверов
Ошибки драйверов Пожалуй, одной из главных причин, приводящих к нестабильности работы операционной системы, является недостаточно продуманное и небезопасное использование драйверов установленных и подключенных устройств. Чаще всего это касается драйверов принтера,
Установка драйверов
Установка драйверов Теперь подробно разберем то, что нужно сделать при проверке кабеля в магазине, а затем и при подключении телефона к своему домашнему компьютеру.Подключение телефона к компьютеру проще всего начать с чтения «Руководства пользователя» к data-кабелю или
Установка драйверов
Установка драйверов Что делать теперь? Теперь вставьте диск с драйверами от материнской платы и установите их. Обычно при этом будут установлены драйверы звуковой, сетевой платы и некоторые дополнительные драйверы.В процессе установки драйверов потребуется
Обновление драйверов
Обновление драйверов Установка последних версий драйверов – эффективное средство для повышения стабильности работы компьютера и устранения неполадок. Существуют два основных способа обновления драйверов: использование службы обновления Windows Vista и поиск на сайте
LED-освещение экономно расходует электроэнергию, является компактным, ярким и весьма эффективным. Однако стоимость светодиодных лент и точечных светильников довольно высока и для того, чтобы получить значительный экономический эффект необходим как можно более длительный период эксплуатации. Для обеспечения долговечности этих устройств необходима организация правильного энергоснабжения, за которую отвечают драйверы для светодиодов.

Читайте в статье
Что такое драйвер для светодиода – зачем они нужны?
Основная функция, которую призван выполнять драйвер для светодиодного светильника – это преобразование переменного тока (220 В) стандартной бытовой сети в постоянный ток с заданными параметрами напряжения. Значение этих параметров должно в точности соответствовать требованиям, указанным в паспорте осветительного устройства. Это обеспечит равномерное и устойчивое свечение светодиодов и предотвратит преждевременную деградацию кристаллов полупроводника.
Историческая справка: Впервые эффект электролюминесцентного свечения полупроводников был открыт еще в 1907 году британским физиком Генри Раундом. Затем повторное, независимое открытие в 1927 году сделал советский физик Лосев О. В., осознавший практическую ценность этого открытия и получивший патент на «световое реле». Однако практического применения светодиодов в качестве источника освещения впервые добился Ник Холоньяк в 1962 году. Массово светодиодные фонари в красных и красно-оранжевых тонах начали выпускаться только в 1976 г. компанией General Electric.
В зависимости от напряжения преобразования различают следующие типы драйверов:
- для бытовых нужд, освещения офисных и производственных помещений используются LED-светильники со схемами драйверов для светодиодов от сети 220 В;
- в портативных переносных фонарях, автомобильных, мотоциклетных и велосипедных фарах используют ток постоянного напряжения от источников питания 9÷36 В;
- некоторые модели слабо мощность светодиодов допускается подключать в сеть 220 В без драйвера, но в этом случае в схеме подключения должен присутствовать резистор.

Область применения драйверов для светодиодов
Драйверы для светодиодной ленты и LED-светильников используются повсеместно:
- уличные фонари;
- жилые и производственные помещения, офисы;
- светодиодные ленты дополнительной технической подсветки и праздничной иллюминации;
- компактные переносные устройства большой световой мощности;
- транспорт.
LED-светильники целесообразно использовать всюду, где требуется длительный период подсветки искусственным освещением.

Освещение улицы при помощи LED-прожекторов гораздо эффективнее
Принцип работы драйвера для светодиода
Принцип работы драйвера, и его основное отличие от стабилизирующего источника питания, заключается в поддержании параметров тока заданного диапазона, независимо от величины выходного напряжения.

Принципиальная схема LED-драйвера для светодиодов
Как видно из схемы, ток стабилизируют сопротивления R1-R4. Заданную частоту получает, проходя через конденсаторы С1-С2. Диодный мост применяется для выпрямления тока. Следует отметить, что стабилизация частоты и напряжения осуществляется как перед выпрямлением, так и после преобразования переменного тока в постоянный. Таким образом, достигается максимальная точность заданных параметров.
Основные характеристики драйверов
К основным характеристикам, на которые необходимо обратить внимание перед приобретением лед-драйвера для светодиодных светильников, относятся:
- Выходное напряжение. Величина этого параметра зависит от количества светодиодов в лампе, способа подачи питания, а также от величины падения напряжения на светодиодах.
- Номинальный ток. Его величина должна быть достаточной для того, чтобы LED источник обеспечивал оптимальную яркость. Представляет собой совокупную величину мощности потребляемой всеми светодиодами.
- Мощность. На величину этого параметра влияет не только совокупная мощность всех светодиодов LED-устройства, но и цвет свечения. Настоятельно рекомендуется приобретать устройства, которые могут обеспечить необходимый запас мощности не менее 25÷30%.

Светодиоды разного цвета имеют различные характеристики величины падения напряжения
Кроме того, в обязательном порядке необходимо учитывать цвет светодиода. В зависимости от цветовых характеристик полупроводниковых кристаллов, даже при прохождении электричества с одинаковой силой тока, показатель величины падения напряжения может существенно изменяться:
Как подобрать драйвер для светодиодов
При приобретении драйвера для светодиодной ленты и лампы необходимо обратить внимание, прежде всего, на выходное напряжение. У подавляющего большинства устройств оно указывается в виде диапазона. На рынке реализуется множество устройств с рабочим интервалом выходного напряжения то 2 В до полусотни и более.

Самодельные светодиодные гирлянды светильники для декорирования помещений
К примеру, если необходимо получить источник света из трех последовательно соединенных светодиодов белого света с мощностью 1 Вт каждый, то необходимо взять драйвер с эксплуатационными характеристиками U – 9÷12 В, I – 350 мA. Падение напряжения для кристаллов белого цвета составляет около 3,3 В. Следовательно при последовательном соединении эти значения суммируются и составляют 9,9 В, что полностью удовлетворяет показателям рабочего диапазона драйвера для светодиода.
Практический совет! Для светодиодных лампы мощностью более 10 Вт целесообразно использовать импульсные драйвера, желательно собранные на микросхеме UCC28810.
Срок службы драйверов
Одним из важнейших показателей качества LED-драйверов является ли ресурс работы. У качественных устройств он составляет не менее 70000 часов, при этом фирмы изготовители предоставляют гарантию не менее чем на пятилетний срок. У драйверов среднего качества ресурс составляет не более 50 000 часов. При их приобретении необходимо обязательно осуществить проверку соответствие номинальных выходных параметров заявленным. Гарантия должна быть не менее года. Устройство сомнительных китайских производителей имеют ресурс работы не более 20 000 часов. Как правило, они не имеют гарантии и сертификатов подтверждающих, что устройство адаптировано для эксплуатации в суровом российском климате (это особенно важно для источников света используемых на улице).

Схема для самодельной гирлянды из LED-светодиодов
Особенности китайских драйверов
Современный рынок предоставляет широкий выбор драйверов для LED-светильников от различных производителей. Большинство из них китайского производства. Они отличаются доступной стоимостью при заявленных довольно высоких эксплуатационных характеристиках. Однако в большинстве случаев их реальные показатели не совпадают с указанными в спецификации. К примеру, при заявленных характеристиках в 50 Вт устройство будет работать на указанной мощности лишь краткосрочный период. После чего показатель может упасть до 40 Вт или даже 30 Вт. Кроме того в схеме могут отсутствовать конденсаторы и сопротивления расположенные после диодного моста. Это не только снизит качество освещения (посещение будет тусклым, возможно мерцание), но и значительно сократит срок работы светодиодов.
Как проверить драйвер для светодиодов на работоспособность и соответствие заявленным параметрам мощности можно узнать из видео:
Читайте также: