Как подключить биполярный шаговый двигатель к униполярному драйверу
Обновлено: 06.07.2024
Шаговый двигатель (далее ШД) - особая разновидность двигателей, который позволяет точно управлять углом поворота ротора. ШД относится к синхронным безщёточным двигателям, имеет несколько обмоток на статоре (2, 4 или 8), ротор же выполнен из магнито-мягких (способных намагничиваться) или магнито-твердых материалов (постоянных магнитов) и их сочетаний.
На данный момент распространены биполярные ШД, обладающие двумя обмотками на статоре. Например, ШД типоразмера NEMA17, одни из самых распространенных биполярных ШД.

Ток в обмотках статора течет то в одну, то в другую сторону попеременно. Поэтому для управления биполярным ШД необходимы два Н-моста, по одному мосту на обмотку.
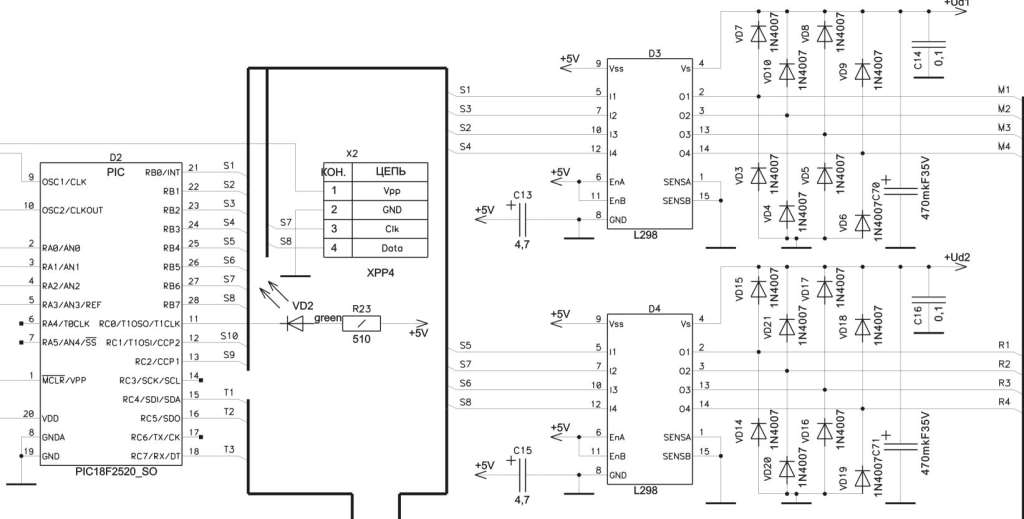
На следующей схеме приведена реализация управления биполярным ШД при помощи двух Н-мостов, каждый из которых построен из 6 транзисторов. Управление осуществляется при помощи микроконтроллера, у которого задействовано 4 выхода. Да и в самой прошивке микроконтроллера придется перебирать выводы управления ШД “вручную”.
Также можно использовать, например, микросхему L293 и аналогичные ей микросхемы (сдвоенный Н-мост), но и в этом случае для управление одним биполярным ШД потребуется 4 вывода микроконтроллера.
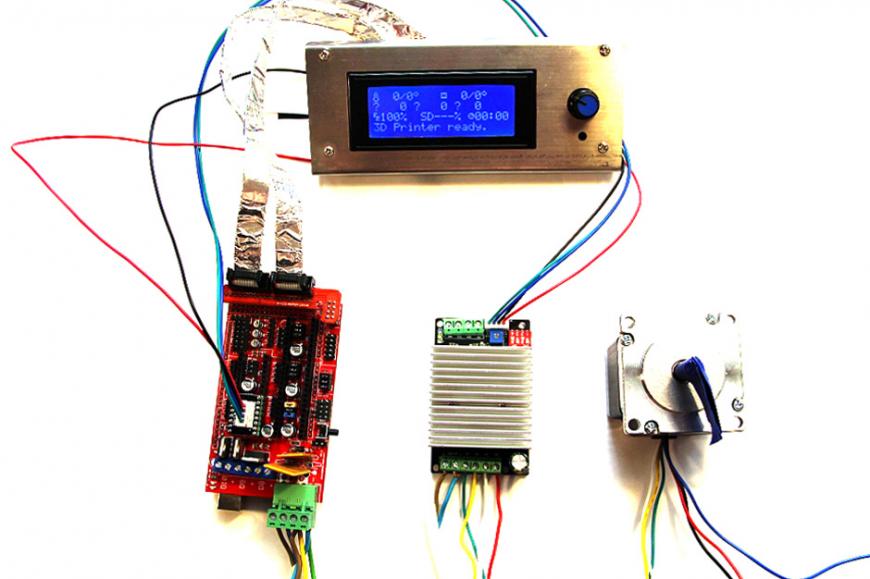
На фото пример готовой платы с микросхемой L298 для подключения по вышеприведенной схеме.

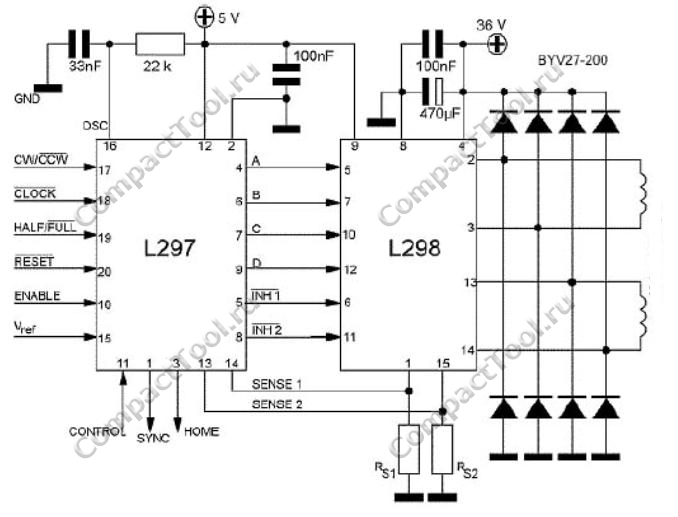
Следующая схема состоит из сдвоенного Н-моста L298 и специального драйвера L297, который преобразует протокол step/dir в понятный микросхеме L298 порядок переключения обмоток. Кроме того, L297 способна реализовать полушаговый режим работы ШД. То есть логика управления упростилась, но драйвер “оброс” ещё одной микросхемой.
На данный момент все вышеприведенные схемы управления биполярными ШД потеряли актуальность. Потому что рынок наполнен драйверами биполярных ШД, стоимость которых достаточно низка, чтобы перестать заниматься изобретением велосипеда.
Драйверы для управления биполярными ШД работают по протоколу step/dir, содержат в себе защитные диоды, позволяют устанавливать силу тока, протекающую через обмотки ШД и позволяют устанавливать дробный шаг ШД (?, ?, ? и так далее), что в свою очередь позволяет контролировать угол поворота ротора с большей точностью.

Сейчас это всё доступно, как по цене, так и по наличию в онлайн и оффлайн магазинах. Но изначально на рынке отсутствовали доступные решения для управления биполярными ШД, поэтому широкое распространение получили униполярные ШД с 4 (реже с 8) обмотками, ток в каждой из которых течет только в одном направлении. Это позволяет управлять униполярным ШД при помощи ключей. Как видно из следующей схемы, для управления униполярным ШД при помощи транзисторов снова необходимо задействовать четыре вывода микроконтроллера, а также необходимо тратить ресурсы микроконтроллера на перебор выходов “вручную”. Но в этом случае, используется всего 4 транзистора, а не 12, как в случае с биполярным ШД.
Изготовление драйверов униполярных ШД, работающих по протоколу step/dir представляет некоторые сложности для новичков-радиолюбителей, но является вполне выполнимой задачей.
Реализация драйвера униполярного ШД показана на следующей схеме.
Но зачем снова изобретать велосипед, если драйверы для ШД стоят не дорого и доступны… ах да, я об этом уже говорил.
Но позвольте, те ШД, что в обилии встречаются в магазинах, предназначены для биполярных ШД. Причем тут униполярные?
Дело в том, что почти любой униполярный ШД можно переделать в биполярный, чаще всего даже без разборки, лишь правильным подключением обмоток.
Униполярный в биполярный.
Чтобы определить, какой тип ШД перед вами, достаточно посчитать количество выводов.
- 4 вывода - перед вами биполярный ШД, поздравляю вас, переделка не требуется.
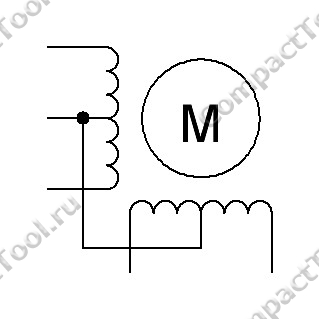
- 5 выводов - униполярный ШД, в котором один из выводов каждой из четырех катушек соединен с остальными (смотрите изображение). Пример такого ШД - распространенный в настоящее время компактный ШД 28BYJ-48.
Переделать такой ШД в биполярный простым переключением катушек не представляется возможным. Необходима разборка двигателя.

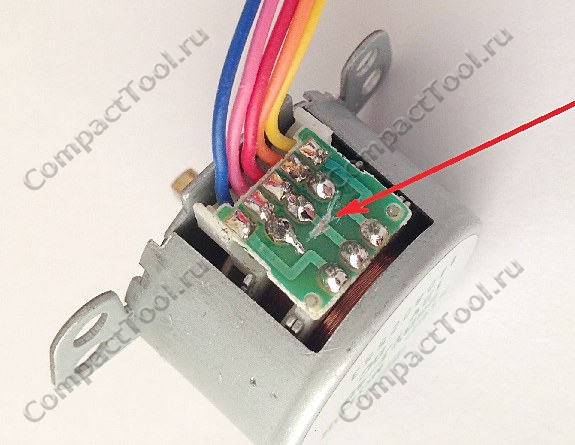
В случае с 28BYJ-48 (на фото выше) переделка сводится к снятию крышки и перерезанию одной дорожки на печатной плате. Ну и соответственно один провод (красный) можно будет выпаять и удалить. При этом момент увеличится в 1,4 раза.
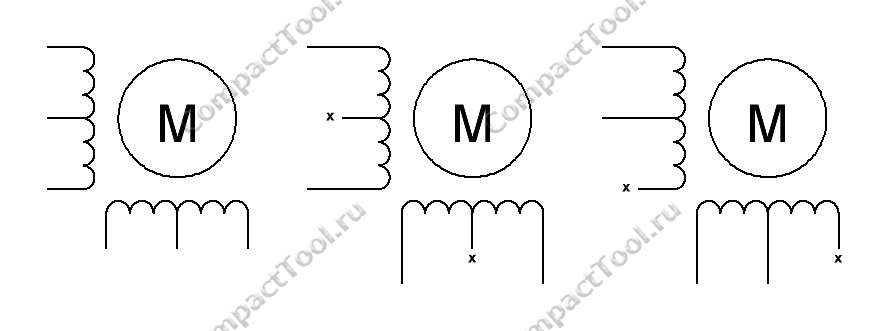
- 6 выводов - очень похож на 5-выводной, за исключением того, что центральные выводы катушек не соединены между собой. Для такого ШД существует 2 способа использования:
- игнорируем центральные выводы катушек, при этом момент увеличивается в 1.4 раза (корень из 2). Момент стабилен на низких частотах.
- игнорируем один из крайних выводов катушки - ШД работает с параметрами, заявленными в даташите (момент, ток). Момент стабилен на высоких частотах.
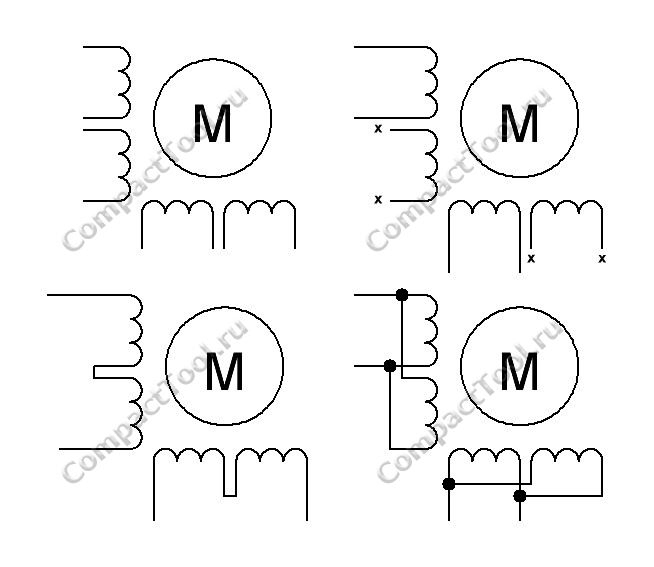
- 8 выводов, четыре независимых катушки. Существует три способа подключения таких ШД:
- игнорируем одну из обмоток в паре обмоток, ШД работает с параметрами, заявленными в даташите (момент, ток), момент стабилен на высоких частотах.
- соединяем пару обмоток последовательно - момент увеличивается в 1,4 раза, момент становится стабилен на более низких частотах, чем в первом варианте.
- соединяем пару обмоток параллельно - момент увеличивается в 2 раза и становится стабилен на более высоких частотах, чем в первом варианте.
Как видно из приведенных выше примеров, использование униполярных ШД с биполярными драйверами вполне реально. Кроме того, в зависимости от типа ШД и способа его подключения его параметры могут меняться, что можно использовать в соответствии с вашими целями.
Заключение.
На данный момент у меня набралась коллекция униполярных ШД от старых матричных принтеров, жестких дисков 80-х годов и прочего устаревшего оборудования. К тому же, я активно использую миниатюрные 28BYJ-48, каждый из которых переделываю для работы с биполярным драйвером для шаговых двигателей. С каждым годом количество униполярных двигателей в обиходе радиолюбителей становится всё меньше. Причиной тому снижение цен на шаговые двигатели типоразмера NEMA и утилизация старых двигателей охотниками за цветными металлами. Тем не менее, я надеюсь, что приведенная мной информация позволит дать вторую жизнь устаревшим униполярным шаговым двигателям, которые еще остались в использовании у радиолюбителей.
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом.
Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов – драйверы.
В функцию драйверов входит:
- обеспечение необходимого тока и напряжения на фазных обмотках двигателя;
- коммутация обмоток;
- включение;
- выключение;
- смена полярности;
Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:
- обеспечение быстрого нарастания тока при включении и быстрого спада при выключении;
- уменьшение тока для фиксации положения остановленного двигателя;
- защитные функции;
- формирование тока и напряжения обмоток для микрошагового режима;
- и многие другие.
Схемы таких драйверов достаточно сложные, а в этих функциях в большинстве приложениях нет необходимости.
По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйверы для этих двух вариантов двигателей принципиально отличаются.
Драйвер униполярного шагового двигателя.
В униполярном режиме могут работать двигатели, имеющие следующие конфигурации обмоток.
![Униполярные шаговые двигатели]()
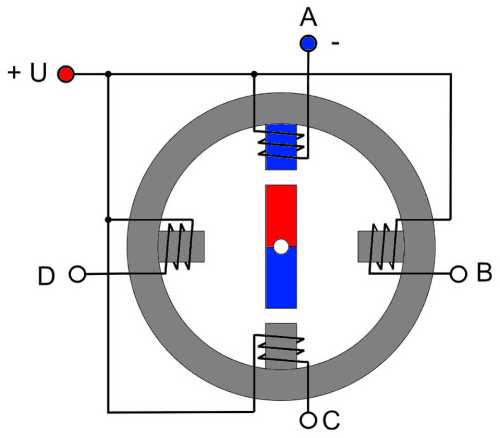
Напомню принцип управления униполярным шаговым двигателем. Четыре обмотки с общим проводом, подключенным к одному полюсу источника питания. Если другие выводы обмоток последовательно коммутировать к другому полюсу источника, то ротор двигателя будет вращаться.
![Униполярный шаговый двигатель]()
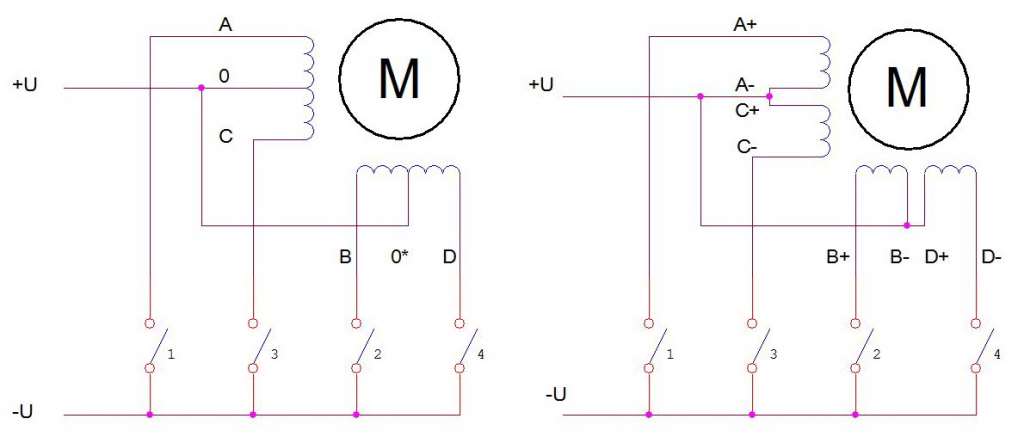
Для коммутации обмоток таким способом достаточно всего четырех ключей, замыкающих обмотки на землю. Схемы коммутации обмоток двух предыдущих вариантов двигателей выглядят так.
![Коммутация обмоток]()
Если последовательно замыкать ключи 1, 2, 3, 4, то ротор двигателя будет вращаться.
Схема драйвера униполярного шагового двигателя.
Практически ключи можно выполнить на биполярных транзисторах, но предпочтительнее использовать низкопороговые MOSFET транзисторы. Я применяю транзисторы IRF7341. Это MOSFET транзисторы с параметрами:
- максимально допустимый ток 4 А;
- предельное напряжение 55 В;
- сопротивление в открытом состоянии 0,05 Ом;
- порог включения 1 В;
- выполнены в миниатюрном корпусе SO-8;
- в корпусе два транзистора.
Крайне удобный вариант для использования в драйвере униполярного шагового двигателя.
- Нет необходимости в радиаторах охлаждения ключей;
- очень низкое падение напряжения на открытом транзисторе;
- малые размеры;
- всего два 8ми выводных корпуса для драйвера двухфазного шагового двигателя.
На биполярных транзисторах ключи с такими параметрами создать не возможно. Есть много других вариантов MOSFET транзисторов для ключей, например IRF7313 ( 6 А, 30 В, 0,029 Ом).
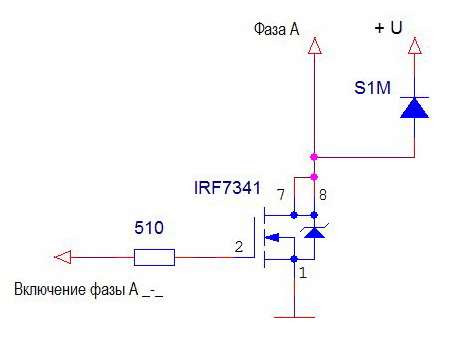
Схема ключа на MOSFET транзисторе для одной фазы выглядит так.
![Ключ для фазы]()
Ключ управляется непосредственно от микроконтроллера логическими уровнями KMOП или TTL ( 0 / +5 В). При управляющем сигнале высокого уровня (+5 В) ключ открыт, и через обмотку фазы идет ток. Диод шунтирует обмотку двигателя в обратном направлении. Он необходим для защиты транзистора от бросков напряжения самоиндукции при выключении фазы. Для управления двигателями на значительных скоростях вращения, лучше использовать высокочастотные диоды, например, FR207.
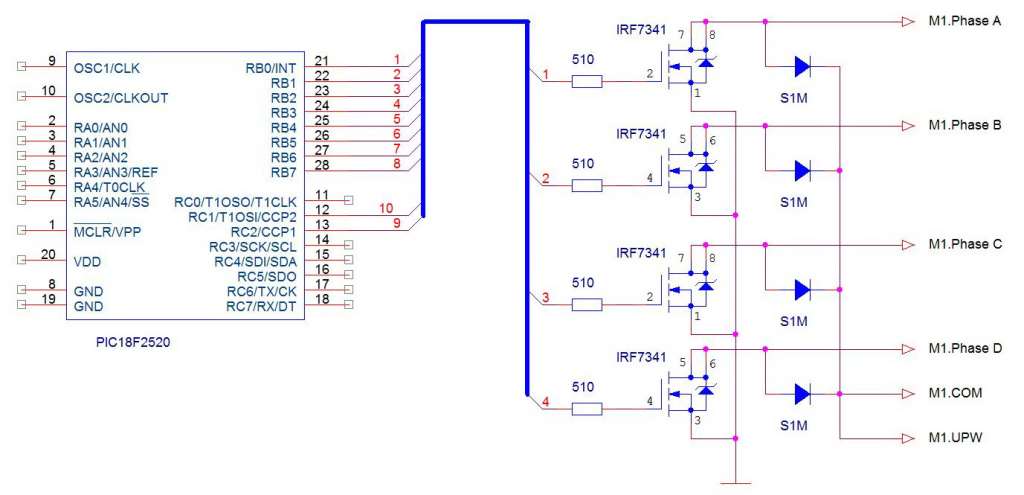
![Схема подключения униполярного шагового двигателя]()
Вот фрагмент схемы подключения униполярного шагового двигателя к микроконтроллеру.
Защиты от коротких замыканий в этой схеме нет. Реализация защиты значительно усложняет драйвер. А замыканий обмоток шаговых двигателей практически не бывает. Я не встречался с таким явлением. Да и на фоне неприятности по поводу сгоревшего дорогого двигателя, замена транзистора не выглядит проблемой.
Кстати, механическое заклинивание вала шагового двигателя не вызывает недопустимых токов в ключах драйвера и защиты не требует.
А это изображение платы контроллера униполярного шагового двигателя с PIC контроллером фирмы Microchip.
![Контроллер шагового двигателя]()
Простая плата с восьми разрядным микроконтроллером PIC18F2520 управляет:
- двумя шаговыми двигателями с током фазы до 3 А;
- двумя ШИМ ключами для электромагнитов;
- считывает состояние 4х датчиков;
- обменивается данными по сети с центральным контроллером.
Несмотря на простоту контроллера, реализованы следующие режимы управления:
- полно-шаговый, одна фаза на полный шаг;
- полно-шаговый, две фазы на полный шаг;
- полу-шаговый;
- фиксацию положения двигателя при остановке.
К достоинствам управления шаговым двигателем в униполярном режиме следует отнести:
- в униполярном режиме крутящий момент примерно на 40 % меньше по сравнению с биполярным режимом.
Драйвер биполярного шагового двигателя.
В биполярном режиме могут работать двигатели, имеющие любые конфигурации обмоток.
![Варианты обмоток шагового двигателя]()
У биполярного двигателя по одной обмотке для каждой фазы. Обычно две обмотки AB и CD. В первых двух вариантах четыре обмотки соединяются так, что получается две. Обмотки по очереди подключаются к источнику питания в одной полярности, затем в другой.
Драйвер биполярного двигателя должен обеспечивать сложную коммутацию. Каждая обмотка:
- подключается в прямой полярности к источнику напряжения;
- отключается от источника напряжения;
- подключается с противоположной полярностью.
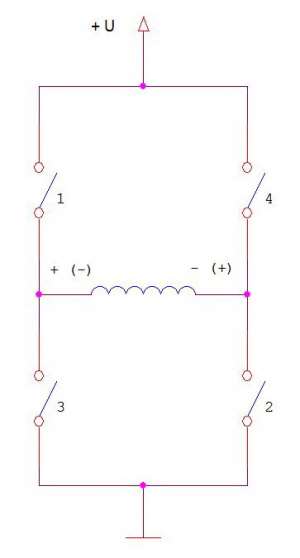
Схема коммутации одной обмотки биполярного двигателя выглядит так.
![Коммутация обмотки биполярного шагового двигателя]()
Для обеспечения двух полярных коммутаций от одного источника питания требуется 4 ключа. При замыкании 1 и 2 ключей обмотка подключается к источнику питания в прямой полярности. Замыкание 3 и 4 ключей подает на обмотку обратную полярность напряжения.
Сложность драйвера биполярного шагового двигателя вызвана не только большим числом ключей ( 4 ключа на обмотку, 8 ключей на двигатель), но и:
- сложное управление верхними ключами ( 1 и 4) от логических сигналов “привязанных” к земле;
- проблемы со сквозными токами при одновременном открывании ключей одного плеча ( 1,3 или 2,4).
Сквозные токи могут возникать из-за не одинакового быстродействия нижнего и верхнего ключа. К примеру, нижний ключ уже открылся, а верхний – не успел закрыться.
Схема драйвера биполярного шагового двигателя.
Реализовать схему драйвера биполярного шагового двигателя на дискретных элементах довольно сложно. Могу показать мою схему, которая подключает биполярный двигатель к униполярному драйверу. Эта схема используется для управления биполярными двигателями от контроллера, приведенного в качестве примера в предыдущей главе.
![Схема драйвера биполярного шагового двигателя]()
Схема достаточно простая. Проблема сквозных токов решается за счет резисторов 0.22 Ом в коммутируемых цепях. В момент коммутаций MOSFET транзисторов, верхний и нижний ключ оказываются одновременно открытыми на короткое время. Эти резисторы и ограничивают сквозной ток. К сожалению, они ограничивают и рабочий ток двигателя. Поэтому, несмотря на мощные транзисторы, драйвер по такой схеме можно использовать для токов коммутации не более 2 А. Схема не требует диодов для защиты от эдс самоиндукции обмоток, потому что эти диоды интегрированы в MOSFET транзисторы.
Гораздо удобнее и практичнее использовать интегральные драйверы биполярного шагового двигателя. Самым распространенным из них является микросхема L298N.
Драйвер биполярного шагового двигателя L298N.
Описания этой микросхемы на русском языке практически нет. Поэтому привожу параметры L298N достаточно подробно, по официальным материалам производителя этой микросхемы – компании STMicroelectronics (datasheet l298n.pdf).
L298N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 46 В.
![L298N]()
- Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели.
- Сигналы управления имеют TTL совместимые уровни.
- Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы.
- Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста.
- Питание логической схемы и нагрузки L298N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
- Микросхема имеет защиту от перегрева на уровне + 70 °C.
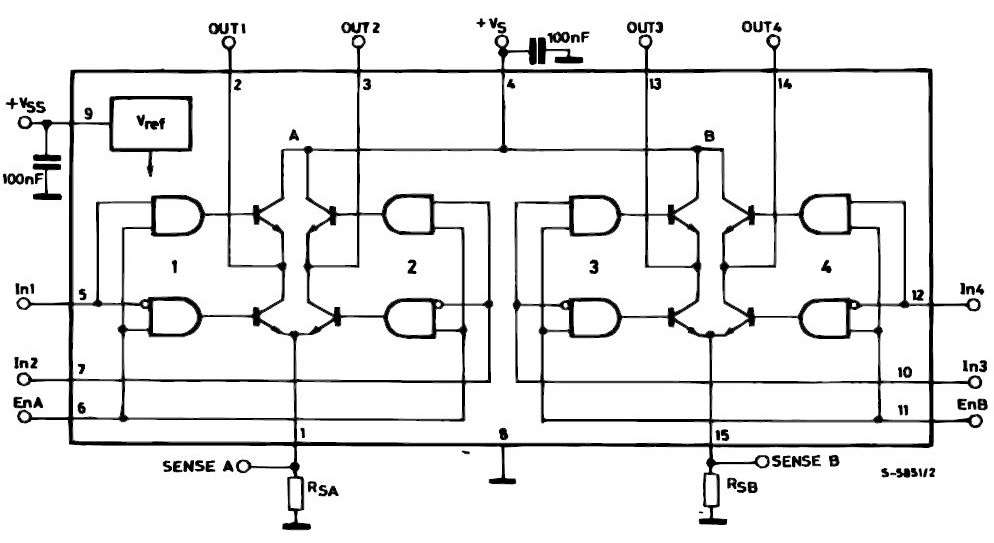
Структурная схема L298N выглядит так.
![Сируктурная схема L298N]()
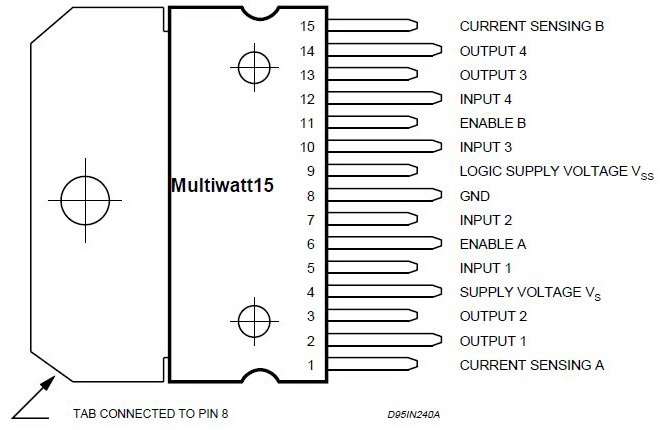
Микросхема выполнена в 15ти выводном корпусе с возможностью крепления радиатора охлаждения.
![Корпус L298N]()
Назначение выводов L298N.
Предельно допустимые параметры L298N.- не повторяющийся импульс 100 мкс
- импульсы (80% включен, 20% выключен, включен 10 мс)
- при постоянном токе
Параметры расчетов тепловых режимов.
Обозначение Параметр Значение Tth j-case Тепловое сопротивление кристалл-корпус 3 ºC/Вт Tth j-amb Тепловое сопротивление кристалл-окружающая среда 35 ºC/Вт Электрические характеристики драйвера L298N.
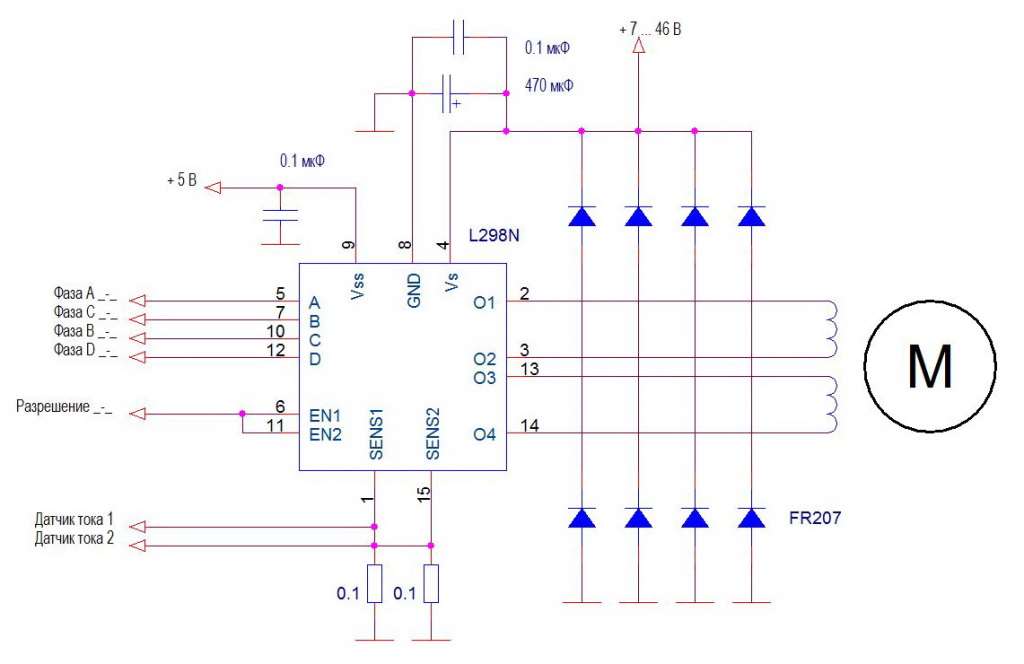
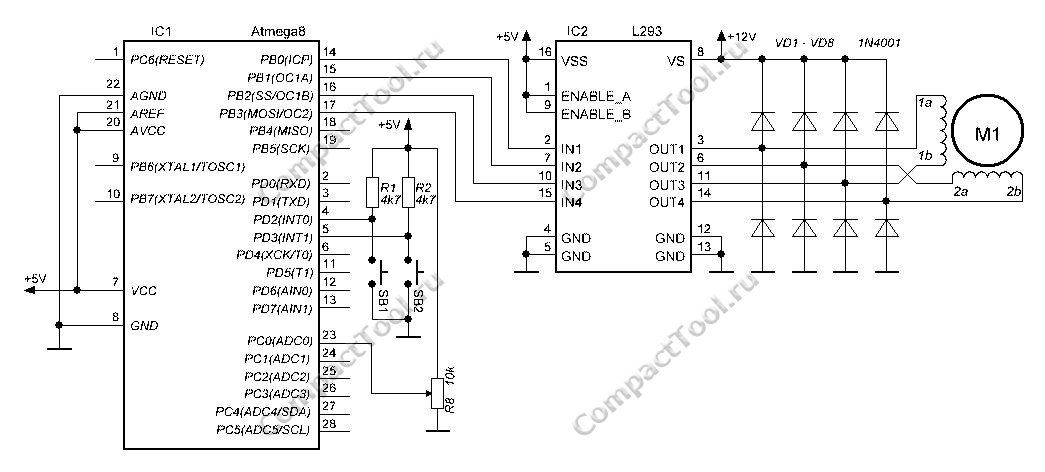
Схема подключения шагового двигателя к микроконтроллеру с помощью драйвера L298N.
![Схема подключения L298N]()
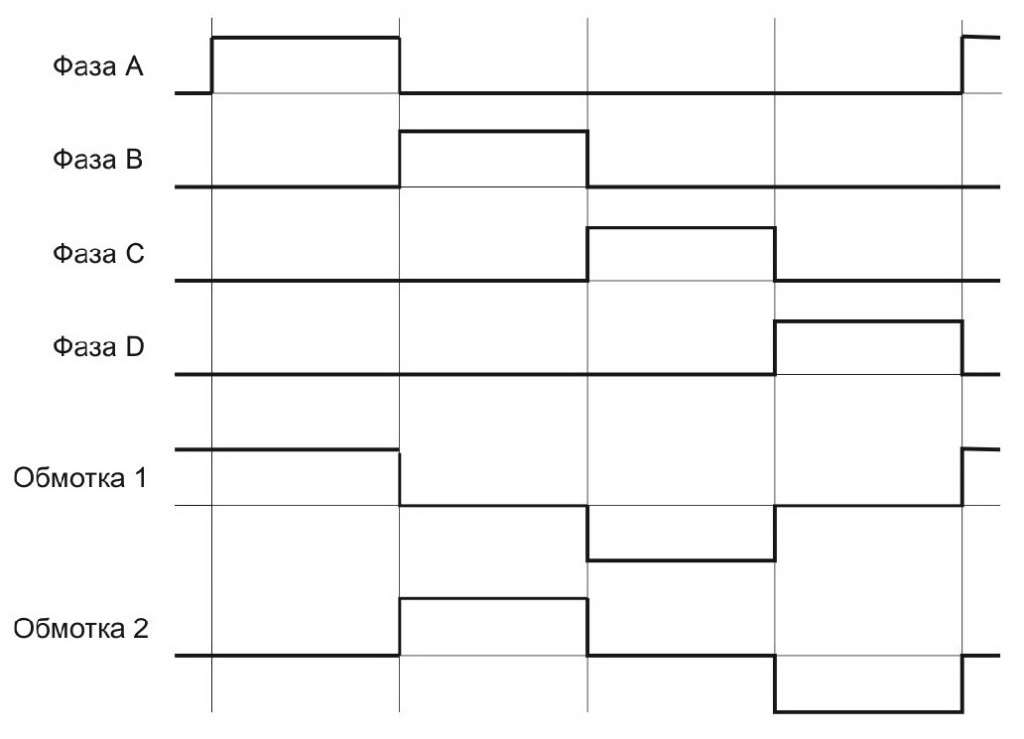
Диаграмма работы этой схемы в полношаговом режиме выглядит так.
![Диаграмма работы L298N]()
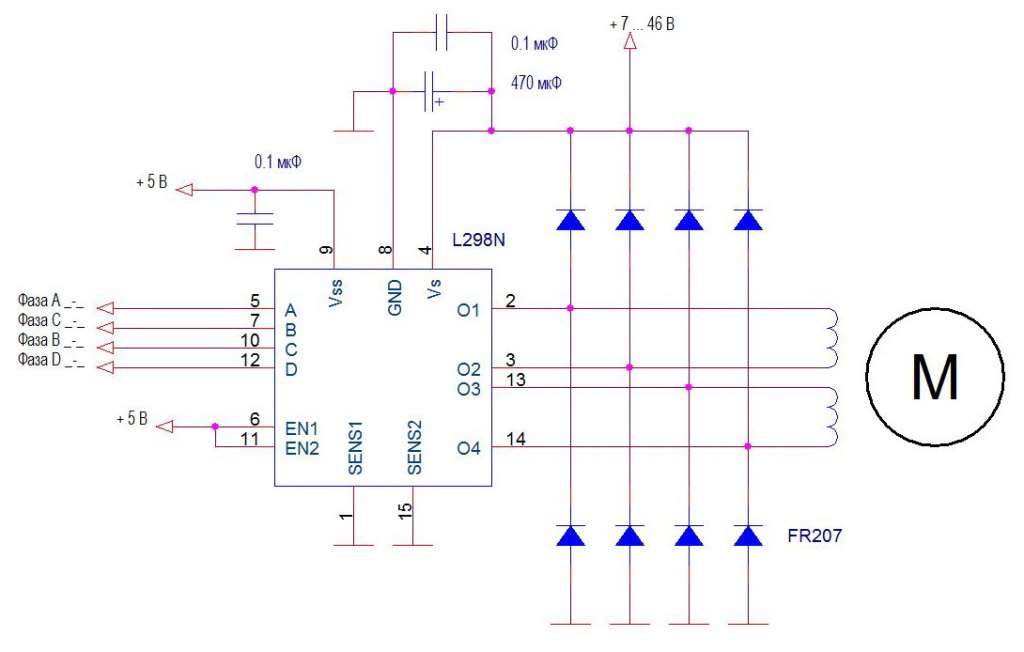
Если не используются разрешающие входы и датчики тока, схема выглядит так.
![Подключение L298N]()
![Контроллер биполярного шагового двигателя]()
По функциям это аналог контроллера описанного в главе про униполярные двигатели, только для биполярного. Он также собран на PIC контроллере фирмы Microchip и управляет двумя биполярными шаговыми двигателями с током фаз до 2 А. Функциональные возможности и режимы управления двигателем те же.
К достоинствам управления шаговым двигателем в биполярном режиме следует отнести:
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
С каждым годом аддитивные технологии развиваются все стремительней и входят в массы, и от этого , естественно, 3D печать становится только доступней. Но не для всех, и поэтому самые очумелые ручки решаются на собственное принтеростроение из всего что только попадется под руки. Одной из главных загвоздок такого принтеростроения становятся шаговые двигатели. Легче всего их достать из старых МФУ принтеров. Но зачастую двигатели из них являются униполярными и совсем не подходят для драйверов типа А4988 и drv8825. Сам столкнулся с такой проблемой, много читал про переделку в биполярный шаговый двигатель и теперь хочу поделиться с вами:)
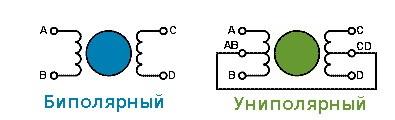
Вот схема соединения катушек униполярного и биполярного шаговых двигателей:
![Переделка шагового двигателя из униполярного в биполярный]()
Как видно, разница в том, что у униполярного шаговика середины обмоток соединены.
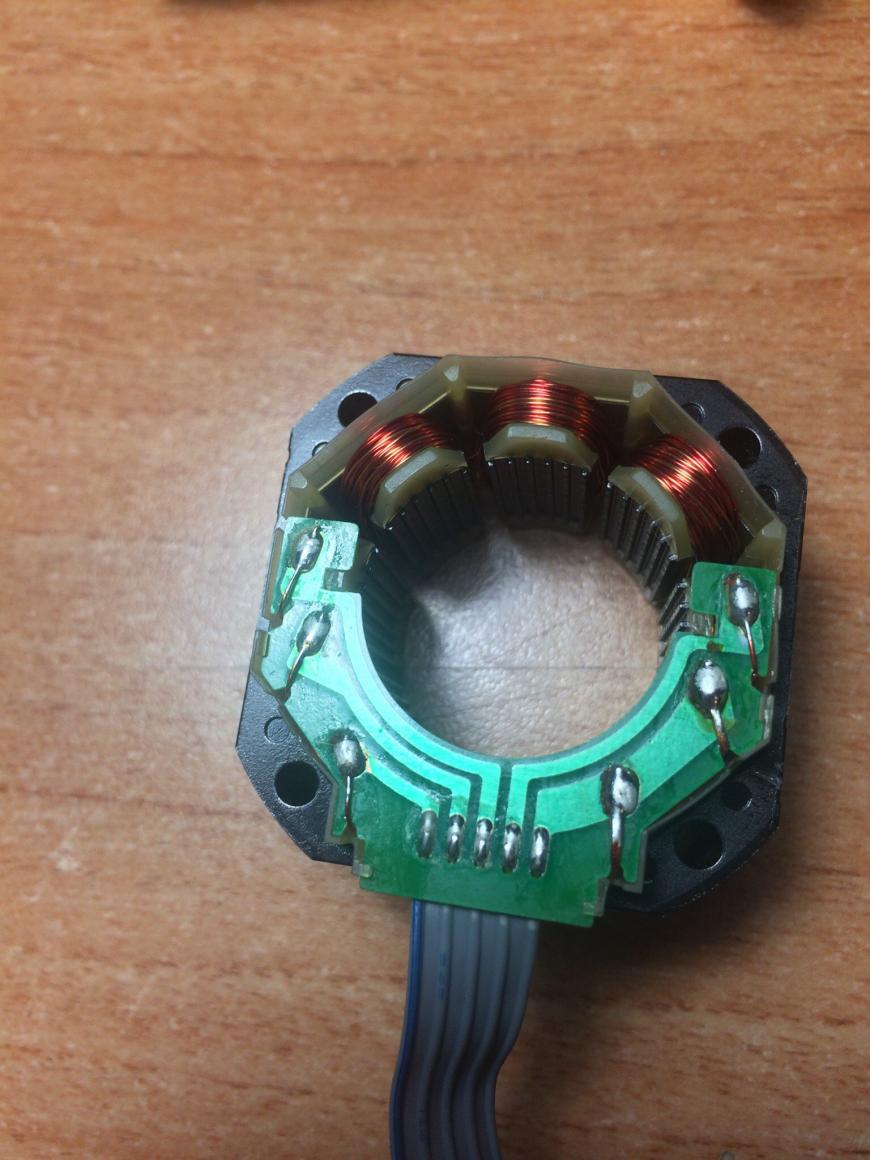
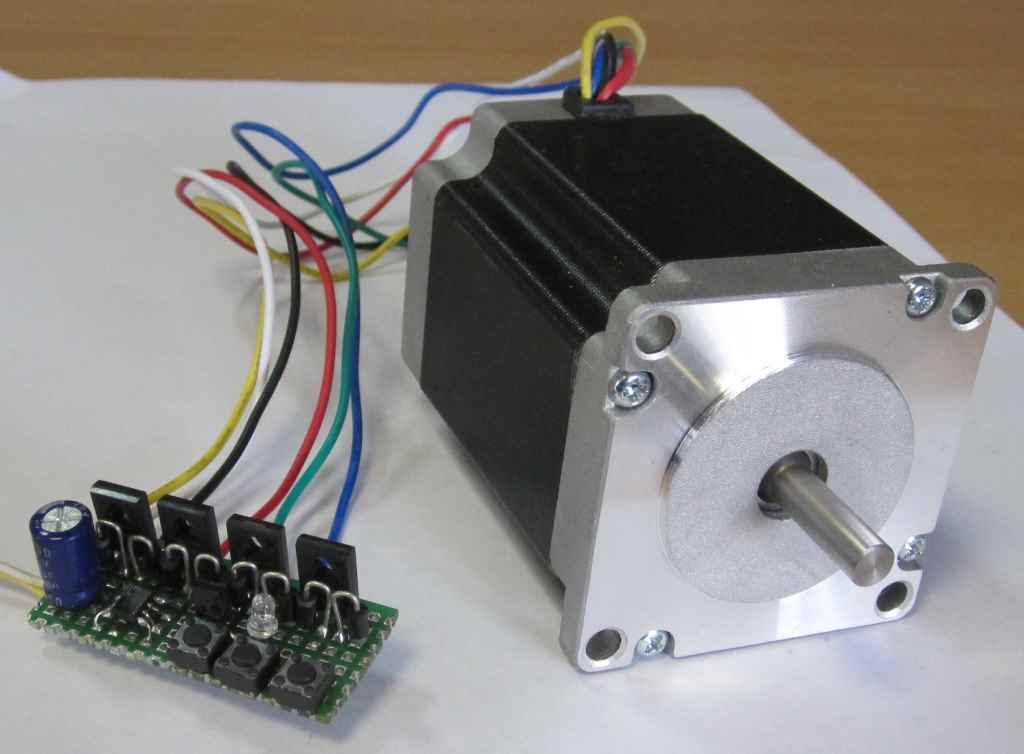
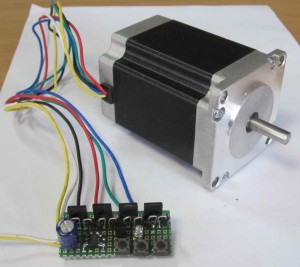
У самого были вот такие шаговики:
![Переделка шагового двигателя из униполярного в биполярный]()
Он имеет стандартный размер Nema 17 и угол поворота на один полный шаг 1.8 градуса.
Для разборки откручиваем 4 болта и снимаем заднюю крышку. Вот что мы должны увидеть:
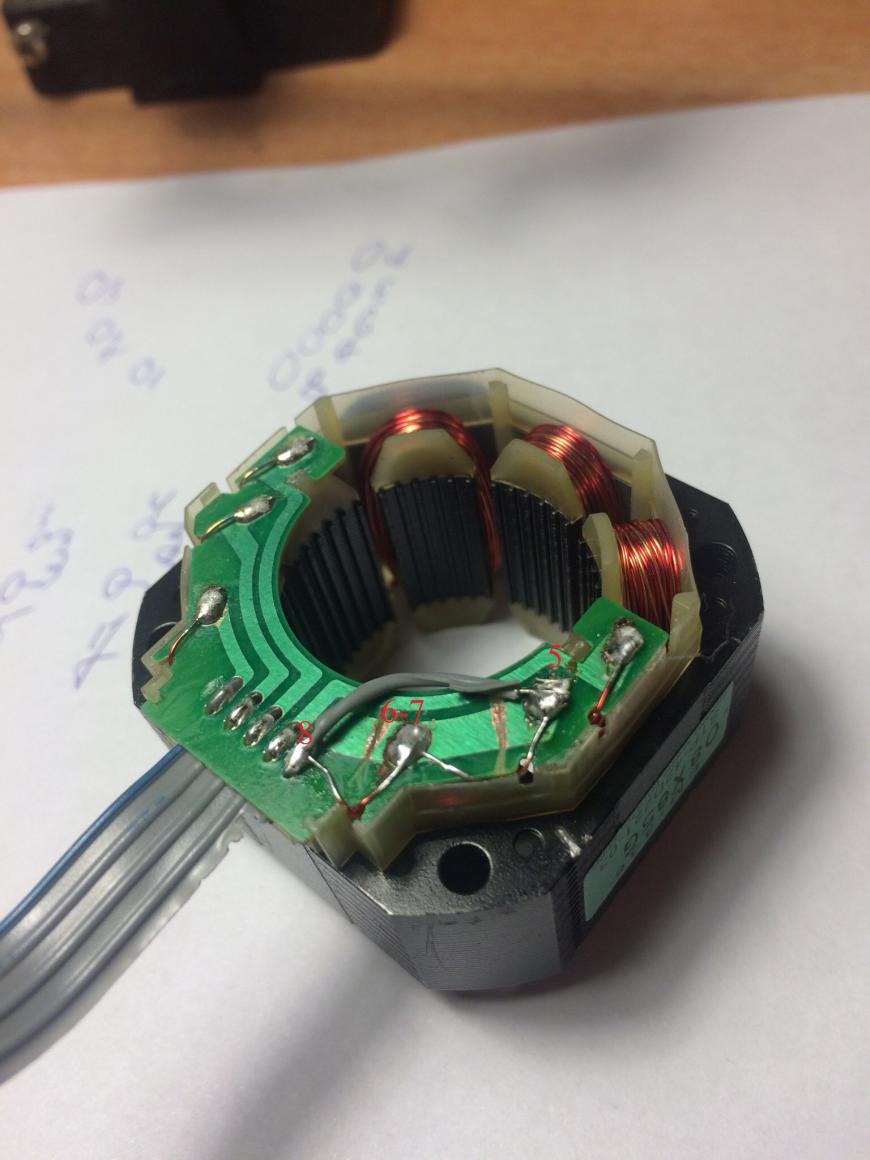
Первым логичным решением кажется просто перерезать пятую слева дорожку, но в большинстве случаев это не возымеет какого-либо эффекта. Если внимательно приглядеться, то заметно, что к пяточкам первых четырех дорожек припаяно по одному проводу, а к пятой уже по два . Отпаиваем их. Дальше все выводы мысленно нумеруем :![Переделка шагового двигателя из униполярного в биполярный]()
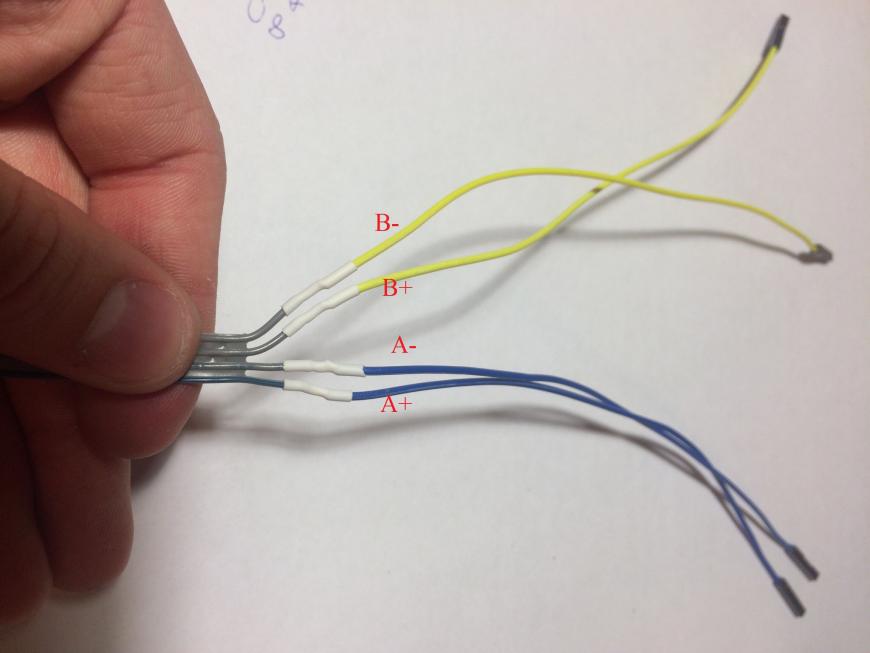
И начинаем прозванивать выводы мультиметром. У меня получилось так : 1-8, 2-5, 3-6 и 4-7. Мы нашли четыре необходимых нам обмотки. Осталось определиться с их соединением. Возможно параллельное соединение обмоток, тогда бы мы соединили 1 с 2 выводом, 8 с 5, 3 с 4 и 6 с 7 соответственно, при данном подключении достигается максимальная скорость вращения. Также возможно последовательное соединение, тогда необходимо соединить 8 с 5 выводом и 6 с 7, при данном подключении получаем максимальный вращающий момент, что важно, например, для экструдеров. Ниже привожу схемы:![Переделка шагового двигателя из униполярного в биполярный]()
Схему соединения необходимо выбирать в зависимости от конкретных целей и удобства соединения. Конкретно в нашем случае удобней выбрать схему с последовательным соединением, так как выводы 6 и 7 и так находятся рядом, и необходима будет лишь одна перемычка между 5 и 8 выводом и никакой больше мишуры из проводов. Разрезаем пятую дорожку на 3 части, и спаиваем все согласно схеме. Вот что получилось у меня:![Переделка шагового двигателя из униполярного в биполярный]()
Также подпоял джамперы для более удобного подключения к плате управления:![Переделка шагового двигателя из униполярного в биполярный]()
![Переделка шагового двигателя из униполярного в биполярный]()
Подсоединяем к плате управления и наслаждаемся работой!) Вот и все, процесс совсем несложный и занимает совсем немного времени.
Всем спасибо за внимание и хороших будней!))
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
![Контроллер шагового двигателя]()
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение (прошивка) для него.
Общее описание.
Контроллер шагового двигателя разработан на PIC контроллере PIC12F629. Это 8 выводной микроконтроллер стоимостью всего 0,5 $. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
- Контроллер имеет варианты схем для управления как униполярным, так и биполярным шаговым двигателем.
- Обеспечивает регулировку скорости вращения двигателя в широких пределах.
- Имеет два режима управления шаговым двигателем:
- полношаговый;
- полушаговый.
Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток – случай крайне редкий. Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует.
Про режимы и способы управления шаговым двигателем можно почитать здесь, про дайверы здесь.
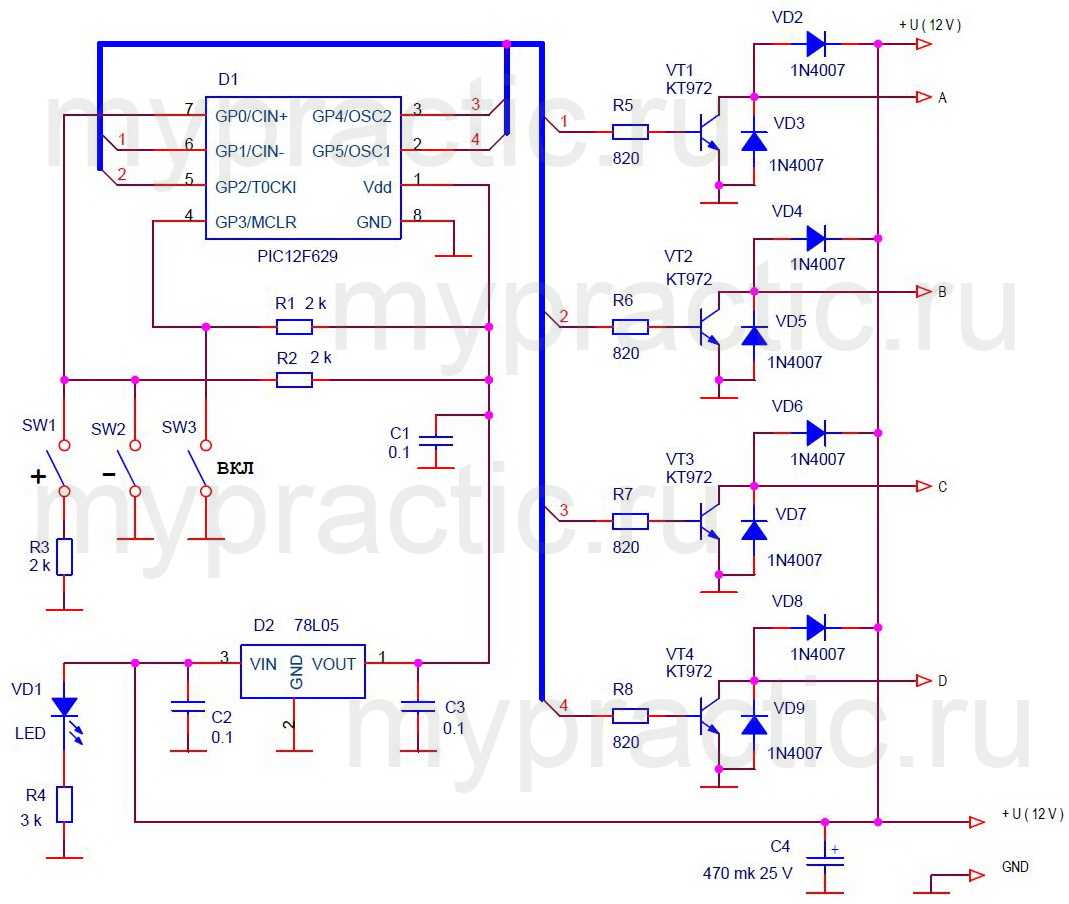
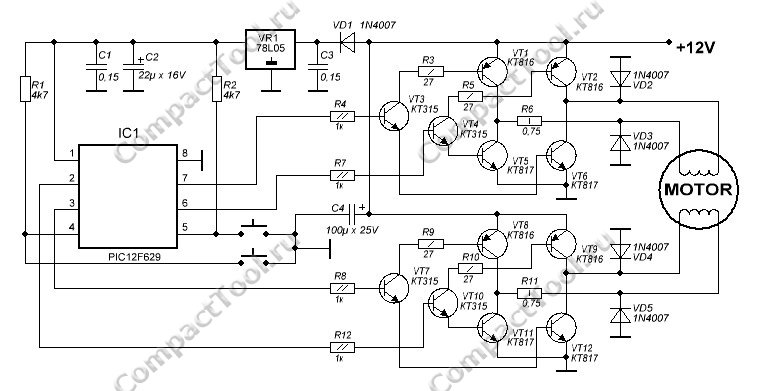
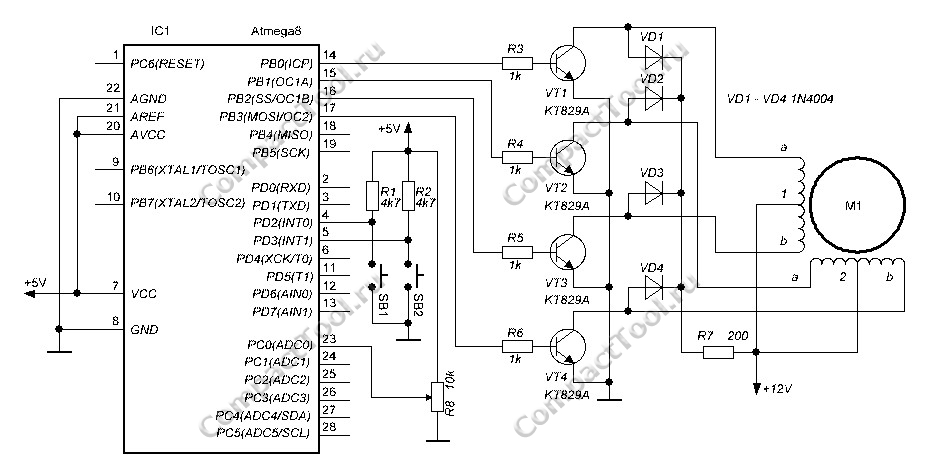
Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.
![Схема контроллера униполярного шагового двигателя]()
Объяснять в схеме особенно нечего. К PIC контроллеру подключены:
- кнопки "+" и "–" (через аналоговый вход компаратора);
- сигнал ВКЛ (включение двигателя);
- драйвер ( транзисторы VT1-Vt4 , защитные диоды VD2-VD9).
PIC использует внутренний генератор тактирования. Режимы и параметры хранятся во внутреннем EEPROM.
Схема драйвера на биполярных транзисторах КТ972 обеспечивает ток коммутации до 2 А, напряжение обмоток до 24 В.
Я спаял контроллер на макетной плате размерами 45 x 20 мм.
![Внешний вид контроллера]()
Если ток коммутации не превышает 0,5 А, можно использовать транзисторы серии BC817 в корпусах SOT-23. Устройство получится совсем миниатюрным.
Программное обеспечение и управление контроллером.
Резидентное программное обеспечение написано на ассемблере с циклической переустановкой всех регистров. Программа зависнуть в принципе не может. Загрузить программное обеспечение (прошивку) для PIC12F629 можно здесь.
Управление контроллером достаточно простое.
- При активном сигнале "ВКЛ" (замкнут на землю) двигатель крутится, при неактивном (оторван от земли) – остановлен.
- При работающем двигателе ( сигнал ВКЛ активен) кнопки "+" и "–" меняют скорость вращения.
- Каждое нажатие на кнопку "+" увеличивает скорость на минимальную дискретность.
- Нажатие кнопки "–" - уменьшает скорость.
- При удержании кнопок "+" или "–" скорость вращения плавно увеличивается или уменьшается, на 15 значений дискретности в сек.
- Нажатие кнопки "+" задает режим вращения в прямом направлении.
- Нажатие кнопки "–" переводит контроллер в режим реверсивного вращения.
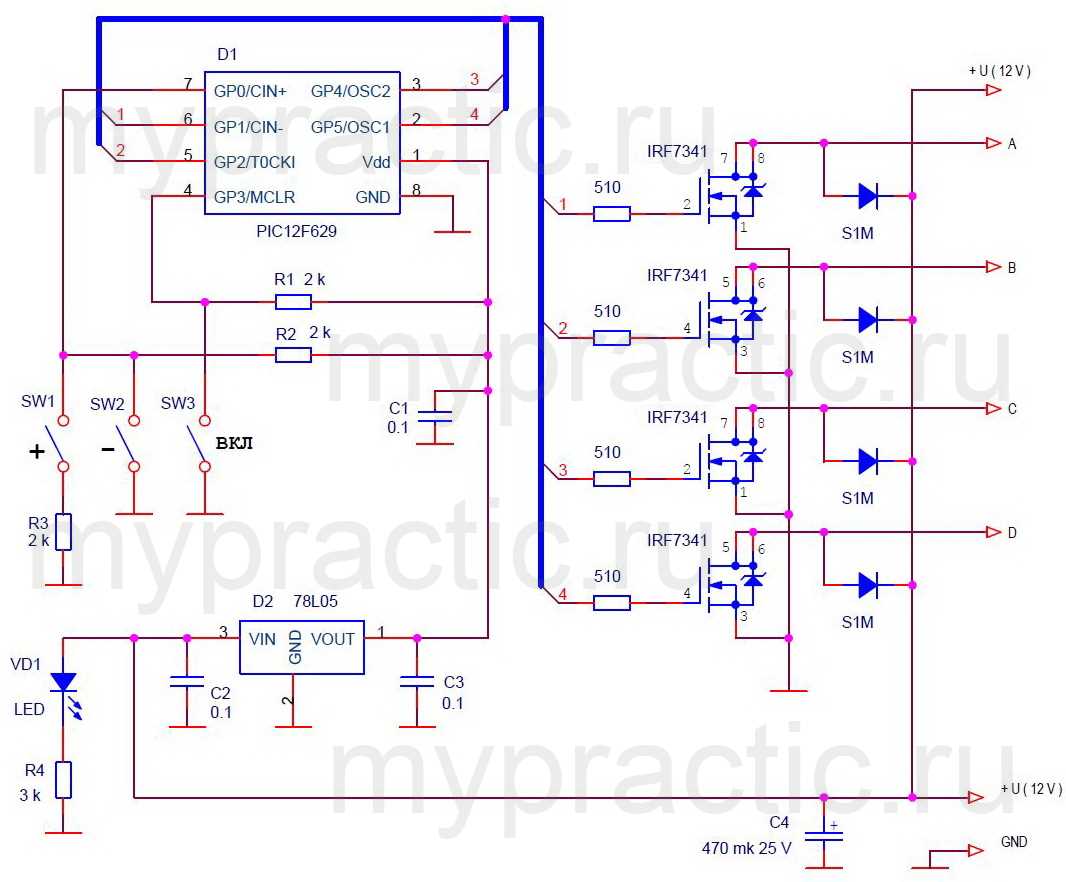
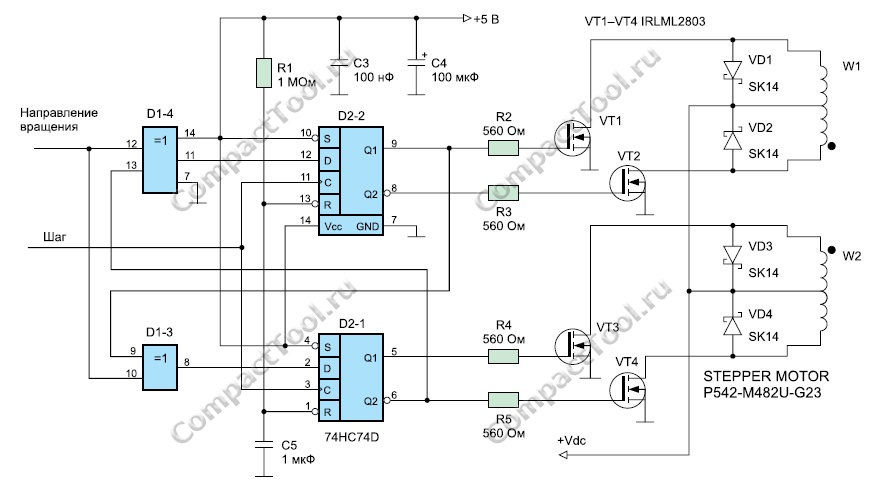
Схема контроллера униполярного шагового двигателя с драйвером на MOSFET транзисторах.
![Схема контроллера униполярного шагового двигателя]()
Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
- Сопротивление транзисторов в открытом состоянии не более 0,05 Ом. Значит малое падение напряжения (0,1 В при токе 2 А), транзисторы не греются, не требуют радиаторов охлаждения.
- Ток транзисторов до 4 А.
- Напряжение до 55 В.
- В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. Т.е. на реализацию драйвера потребуется 2 миниатюрных корпуса.
Таких параметров невозможно достичь на биполярных транзисторах. При токе коммутации свыше 1 А настоятельно рекомендую вариант утройства на MOSFET транзисторах.
Подключение к контроллеру униполярных шаговых двигателей.
В униполярном режиме могут работать двигатели с конфигурациями обмоток 5, 6 и 8 проводов.
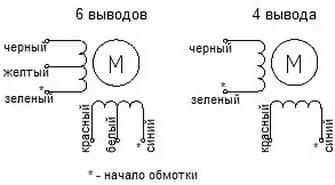
Схема подключения униполярного шагового двигателя с 5 и 6 проводами (выводами).
![Схема подключения 6 выводов]()
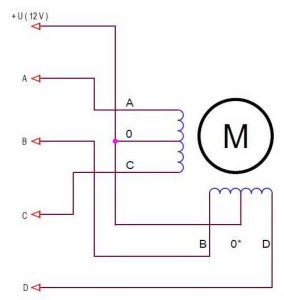
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 6 проводов выводы промаркированы следующим цветами.
Обозначение вывода на схеме Цвет провода A черный 0 желтый C зеленый B красный 0* белый D синий ![Контроллер]()
Конфигурация с 5 проводами это вариант, в котором общие провода обмоток соединены внутри двигателя. Такие двигатели бывают. Например, PM35S-048.
![Контроллер с PM35S-048]()
Документацию по шаговому двигателю PM35S-048 в PDF формате можно загрузить здесь.
Схема подключения униполярного шагового двигателя с 8 проводами (выводами).
То же самое как и для предыдущего варианта, только все соединения обмоток происходят вне двигателя.
Как выбирать напряжение для шагового двигателя.
По закону Ома через сопротивление обмотки и допустимый ток фазы.
U = Iфазы * Rобмотки
Сопротивление обмотки постоянному току можно измерить, а ток надо искать в справочных данных.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Как определить обмотки шаговых двигателей, если нет справочных данных.
В униполярных двигателях с 5 и 6 выводами, средний вывод можно определить, измерив, сопротивление обмоток. Между фазами сопротивление будет в два раза больше, чем между средним выводом и фазой. Средние выводы подключаются к плюсу источника питания.
Дальше любой из фазных выводов можно назначить фазой A. Останется 8 вариантов коммутаций выводов. Можно их перебрать. Если учесть, что обмотка фазы B имеет другой средний провод, то вариантов становится еще меньше. Попутка обмоток фаз не ведет к выходу из строя драйвера или двигателя. Двигатель дребезжит и не крутится.
Только надо помнить, что к такому же эффекту приводит слишком высокая скорость вращения (выход из синхронизации). Т.е. надо скорость вращения установить заведомо низкую.
Схема контроллера биполярного шагового двигателя с интегральным драйвером L298N.
Биполярный режим дает два преимущества:
- может быть использован двигатель с почти любой конфигурацией обмоток;
- примерно на 40% повышается крутящий момент.
Создавать схему биполярного драйвера на дискретных элементах – дело неблагодарное. Проще использовать интегральный драйвер L298N. Описание на русском языке есть здесь.
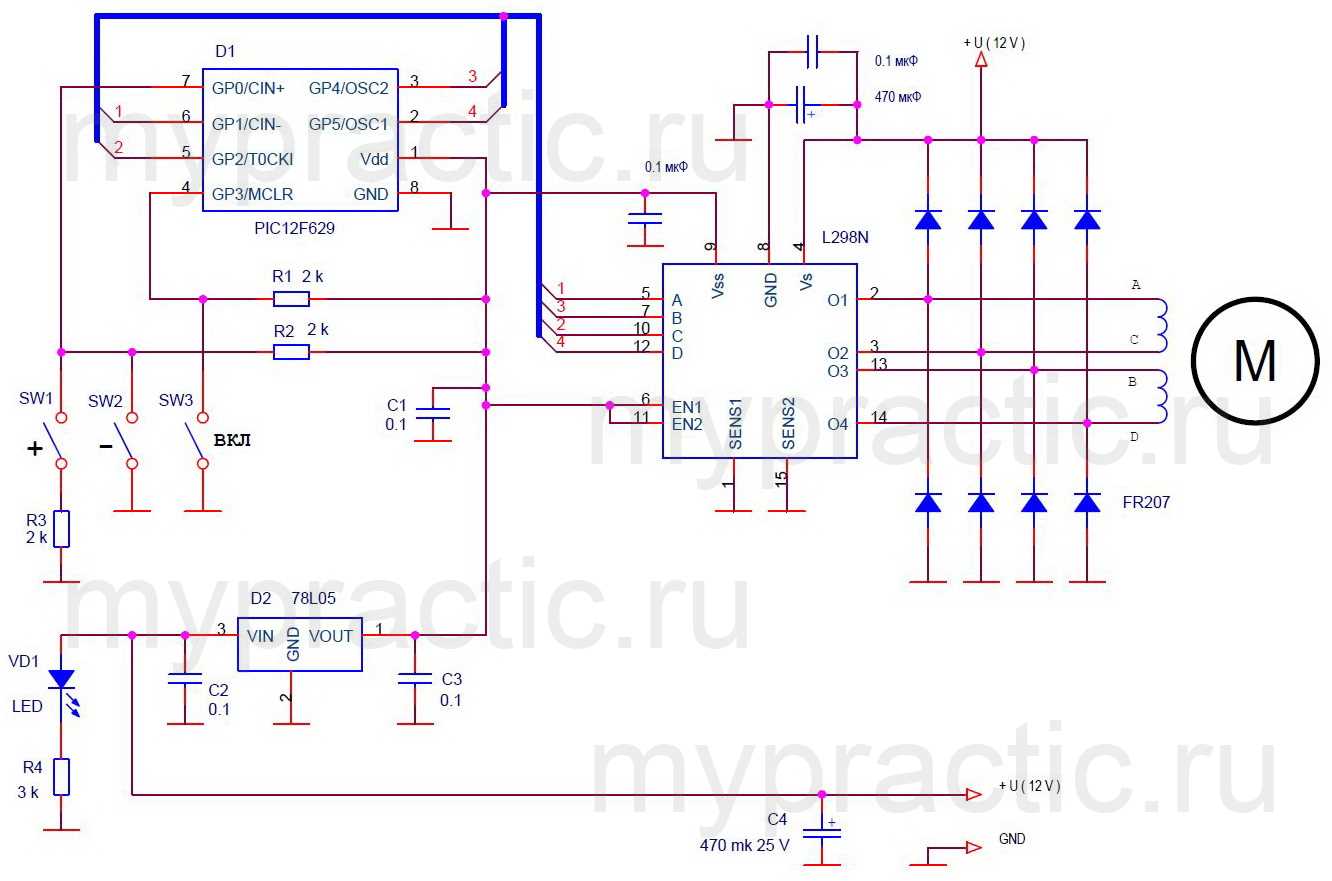
Схема контроллера с биполярным драйвером L298N выглядит так.
![Схема контроллера биполярного шагового двигателя]()
Драйвер L298N включен по стандартной схеме. Такой вариант контроллера обеспечивает фазные токи до 2 А, напряжение до 30 В.
Подключение к контроллеру биполярных шаговых двигателей.
В этом режиме может быть подключен двигатель с любой конфигурацией обмоток 4, 6, 8 проводов.
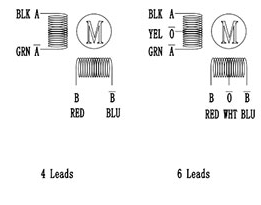
Схема подключения биполярного шагового двигателя с 4 проводами (выводами).
![Схема 4 вывода]()
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 4 провода выводы промаркированы следующим цветами.
Обозначение вывода на схеме Цвет провода A черный C зеленый B красный D синий Схема подключения биполярного шагового двигателя с 6 проводами (выводами).
![Схема 6 выводов]()
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с такой конфигурацией обмоток выводы промаркированы следующим цветами.
Обозначение вывода на схеме Цвет провода A черный C зеленый B красный D синий Такая схема требует напряжения питания в два раза большего по сравнению с униполярным включением, т.к. сопротивление обмоток в два раза больше. Скорее всего, контроллер надо подключать к питанию 24 В.
Схема подключения биполярного шагового двигателя с 8 проводами (выводами).
Может быть два варианта:
- с последовательным включением
- с параллельным включением.
Схема последовательного включения обмоток.
Схема с последовательным включением обмоток требует в два раза большего напряжения обмоток. Зато не увеличивается ток фазы.
Схема параллельного включения обмоток.
![Схема 8 выводов]()
Схема с параллельным включением обмоток увеличивает в 2 раза фазные токи. К достоинствам этой схемы можно отнести, низкую индуктивность фазных обмоток. Это важно на больших скоростях вращения.
Т.е. выбор между последовательным и параллельным включением биполярного шагового двигателя с 8 выводами определяется критериями:
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Статья относится к принтерам:
Добрый день 3д печатники и 'колхозники'.
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
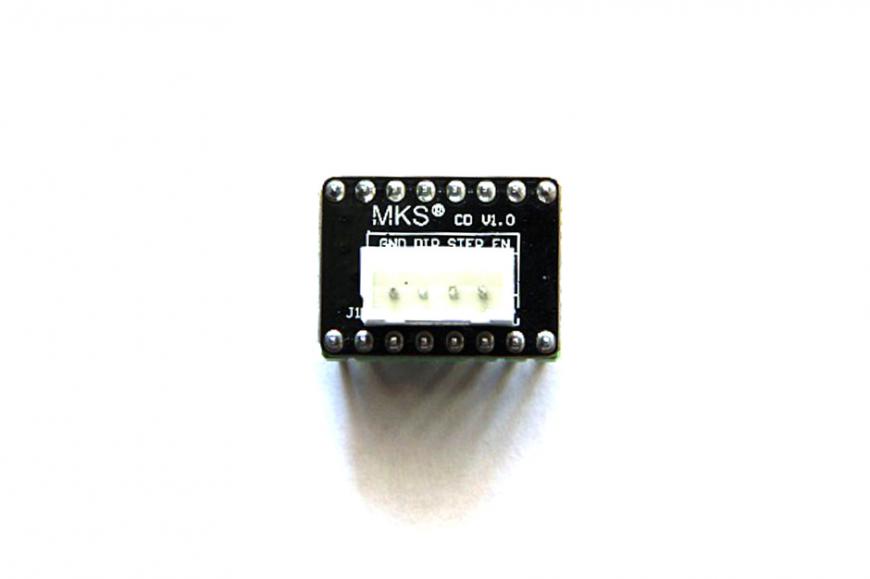
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
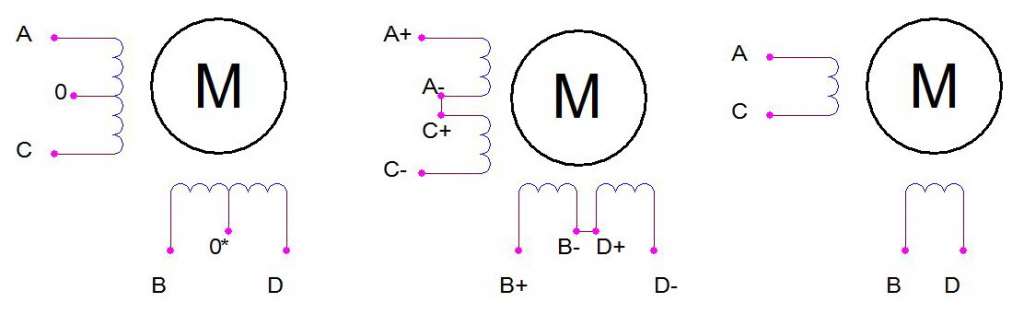
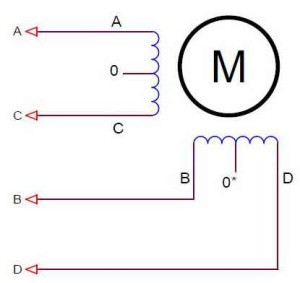
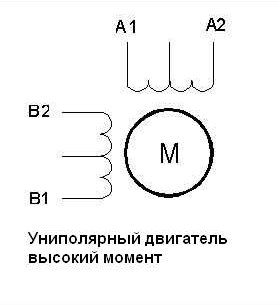
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
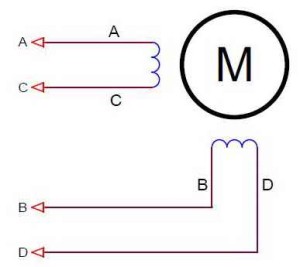
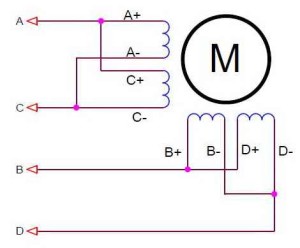
Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Слева биполярный, справа униполярный двигатель.
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.
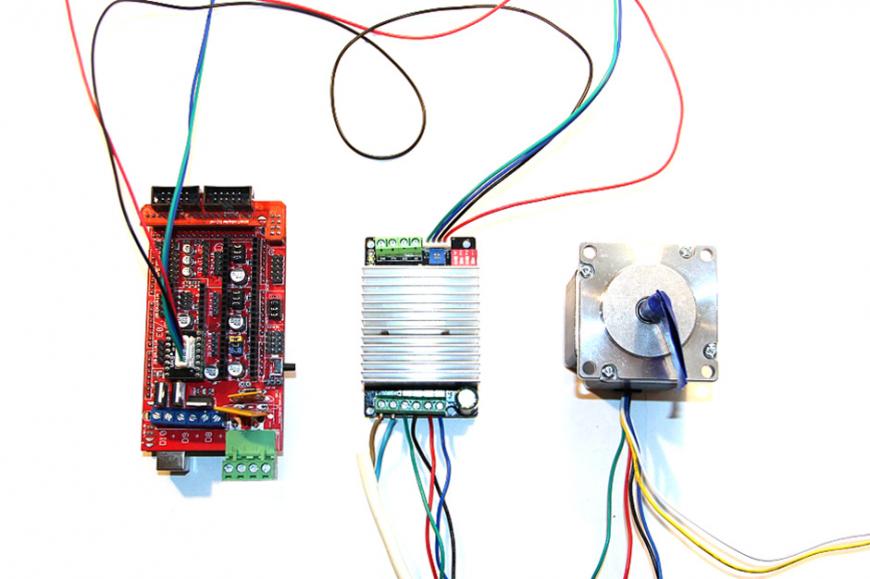
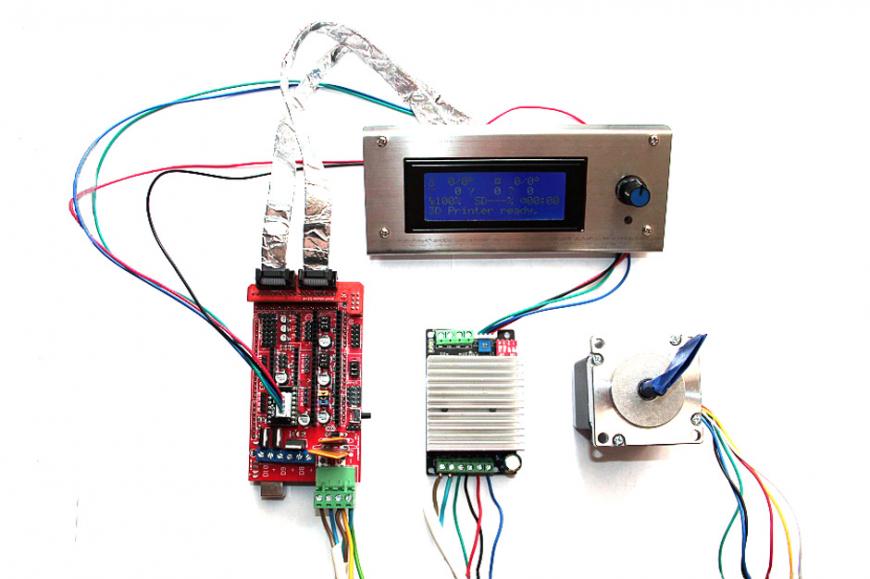
Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
Пошаговая инструкция для чайников :).
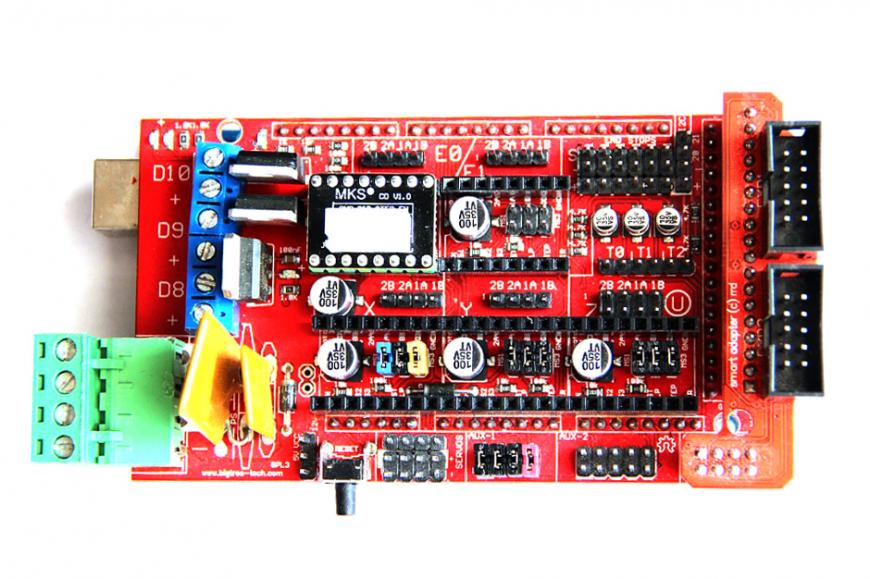
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
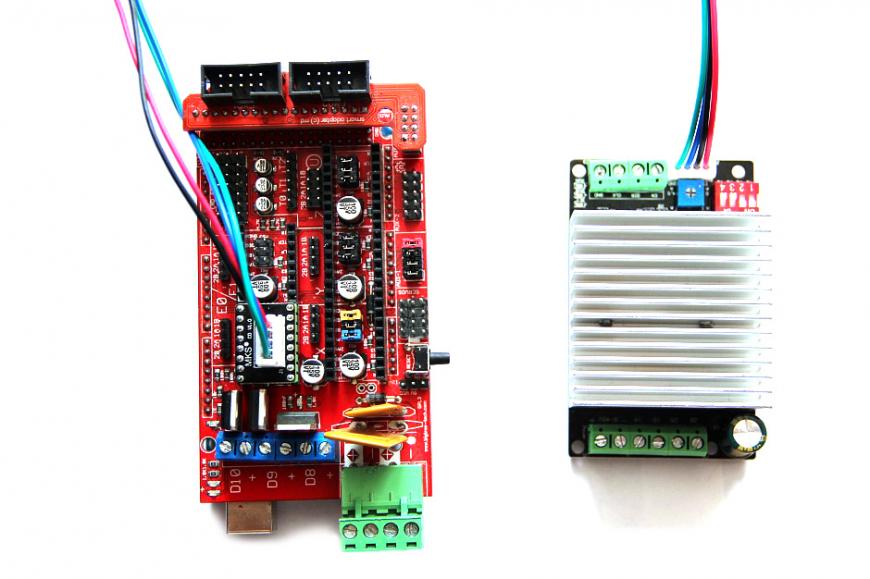
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
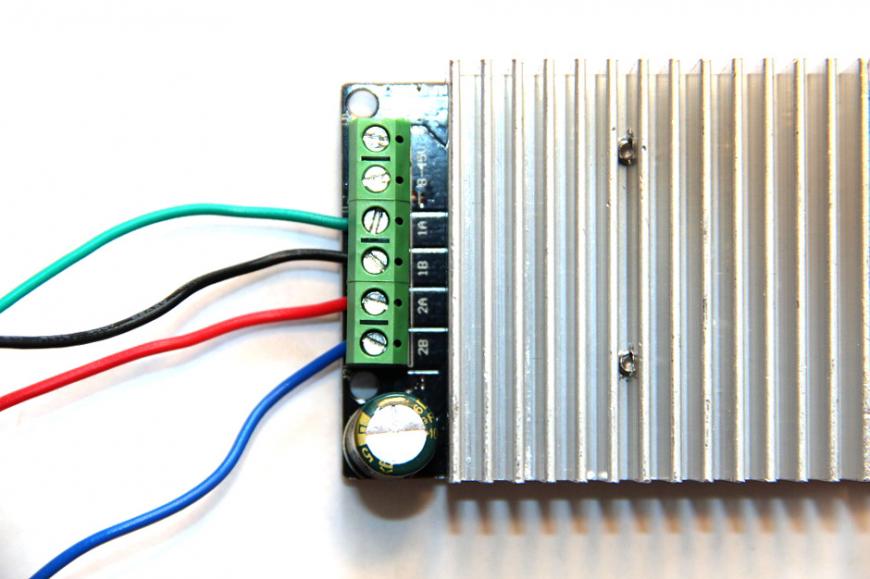
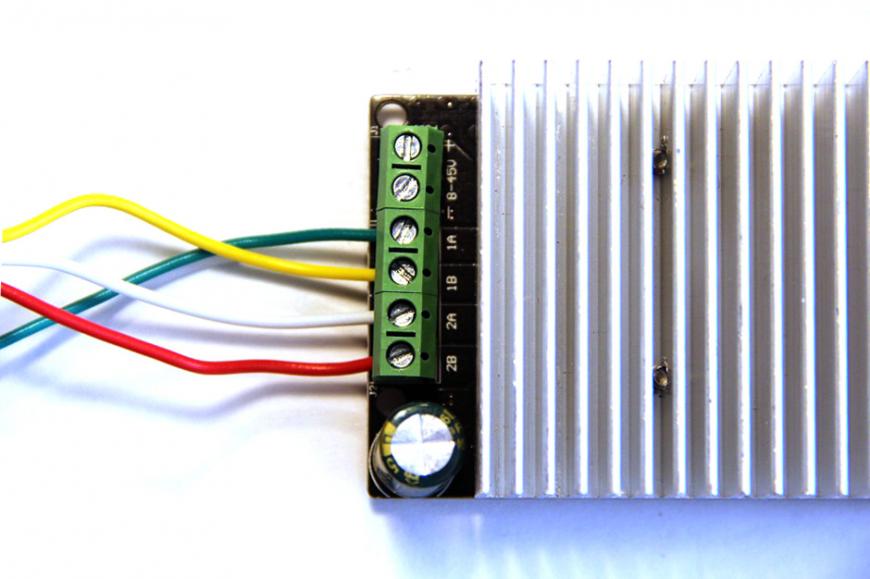
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
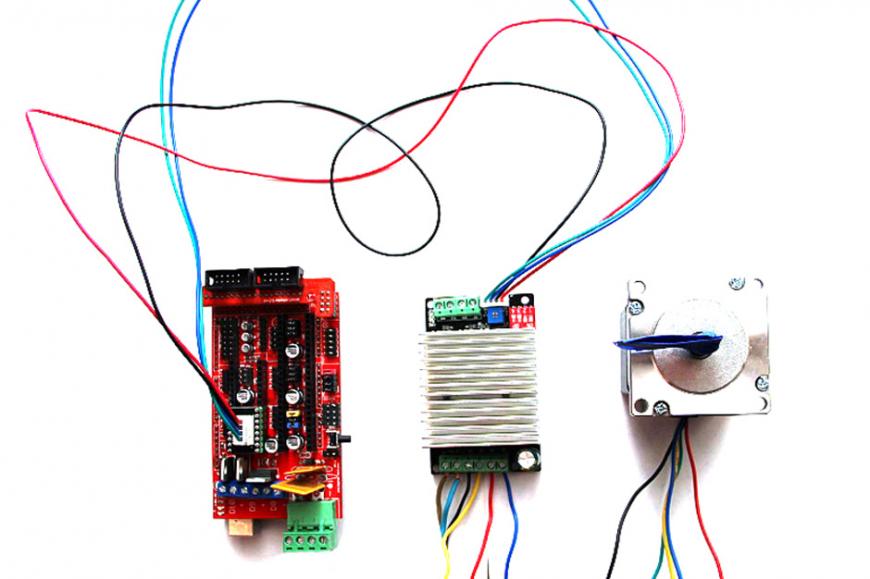
2) Второй вариант. Подключаем двигатель к драйверу не используя крайние выводы в обмотках, то есть черный и синий. Таким способом подключения мы получим высокую приемистость.![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
Пошаговая инструкция уже для опытных мейкеров 8).
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
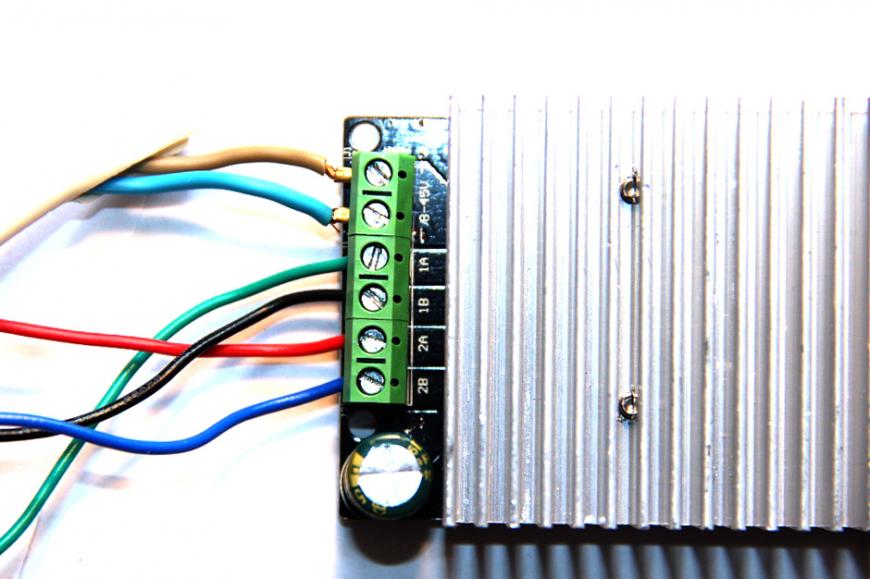
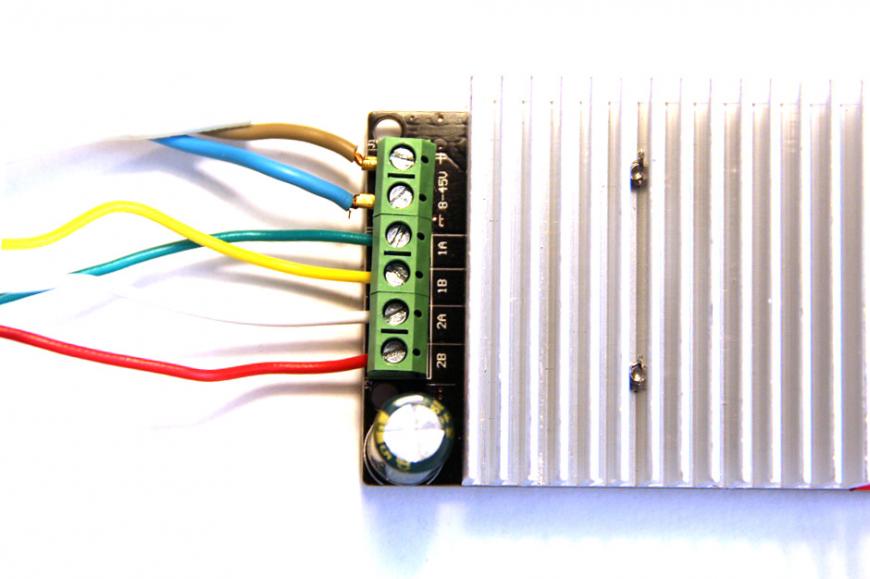
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
![Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4]()
Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным. Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).
Читайте также: