
Как подключить драйвер для шагового двигателя на станок чпу
Обновлено: 06.07.2024
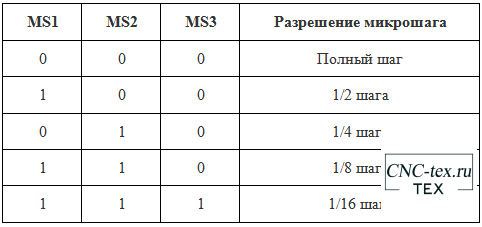
Определние на какой микрошаг настроен драйвер шагового мотора для чайников.
Откройте блок блок управления и найдите место,
где в нём установлены коробочки примерно такого вида:
Число коробочек и число осей станка должно совпадать.
если есть поворотная ось,то для неё как может быть отдельная коробочка,как и нет.
В этом случае вам при продаже станка должны были сказать,
что поворотная ось подключается вместо одной из линейных осей.
Также на станках улучшенной конструкции на некоторые оси может быть установлен не один мотор,
а два в крайнем положении оси каждый.
Такая конструкция делается для того,чтобы более точно позиционировать инструмент по краям рабочего поля.
При правильном подключении такие моторы подключаются к ЧПУ не зависимо друг от друга и то,
что они управляют одной осью задаётся соответсвующими настройками внутри ЧПУ собственно.
На одной из коробочек найдите таблицу соответствия числа шагов и положения переключателей для настройки микрошага.
Выглядит обычно эта таблица так:
Первый столбец этой таблицы назван Pulse/Rev,то есть число шагов на один оборот двигателя.
Вообще говоря,хотя угол,на который поворачивается двигатель при одном полном шаге и стандартен,
но в стандарте есть и другие значения угла поворота двигателя при полном шаге.
Например LeadShine производит двухфазные двигатели с углами поворота в 0,9 и 1,8 градуса.
Соответственно на один оборот будет приходиться в первом случае 360/0,9=400 шагов.
Во втором случае только 200.
Но тем не менее в таблице указан не микрошаг,а число шагов на оборот для конкретного двигателя.
Чтобы получить от туда микрошаг разделим число шагов на оборот в каждой строке на число
шагов двигателя для которого сделана таблица.
Для какого двигателя делалась таблица на каробке драйвера не объясняется,поэтому будем его угадывать.
Наиболее распространённый вариант двигателя имеет 200 шагов на оборот.
Делим на него числа из таблицы и получаем последовательность
200:200=2^0=1 (Целый,не дроблёный шаг,в таблице вместо 200 стоит слово default )
400:200=2^1=2
800:200=2^2=4
1600:200=2^3=8
3200:200=2^4=16
6400:200=2^5=32
12800:200=2^6=64
25600:200=2^7=128
Отношения совпадают со степенями двойки,так что похоже,что предположение о том,
что таблица составлена для двигателя с 200 шагами на оборот правильное.
То что указано справа и есть микрошаг - отношение числа микрошагов к одному полному шагу двигателя.
Чтобы определить на какой микрошаг настроен драйвер,посмотрим на названия других столбцов таблицы.
Они называются SW5,SW6 и SW7.
Так обычно называют всякие переключатели и выключатели.
Теперь поищем их,обычно они находятся на верху между двумя группами клем,
но могут быть выведены и в другом месте.
Осматриваем драйвер и находим вот это:
Переключатель справа круговой,а значит принимать сразу значения из всех трех столбцов не может.
А вот слева есть набор из 8 тумблеров и так как никаких других переключателей у драивера нет,
предпологаем.чтоименно их и имеют ввиду в этой таблице и смотрим на положение 5,6 и 7 тумблера соответственно.
Видим что все они в верхнем положении,но что это значит,ON или OFF?
Слева внизу на тумблере есть надпись ON и указывающая на него стрелка.
Значит положение переключателя внизу означает что он включен (ON).
А все три переключателя в верхнем положении,значит они в состоянии OFF.
Ищем соответствующею строку в таблице и видим,что ей соответствует микрошаг 128.
При таком микрошаге драйвер может работать не стабильно,поэтому уменьшим его 8.
Смотрим в таблице положение выключателей для такого микрошага и видим,
что для перенастройки драйвера на него надо переключатели SW5,SW6 надо оставить в положении OFF,
а переклячатель SW7 опустить в низ в состояние ON.
Выключам станок,коли он у вас был включен и переключаем тумблеры.
Готово,теперь у нас микрошаг 8 и теперь остаётся только соответственно перенастроить ЧПУ,
а то будет изменение маштаба в 128:8 раз.
Число коробочек и число осей станка должно совпадать.
если есть поворотная ось,то для неё как может быть отдельная коробочка,как и нет.
На станках с большим полем на одну ось может стоять 2 драйвера и два двигателя.
Я по мнению сообщества безграмотен,могу дать вредные или ошибочные советы.
Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
Поправь тогда и деление. 400 - это деление на 2. Дефолт - 1 к 1. Самые распространенные моторы имеют шаг 1.8 градуса. С шагом 0.9 редкость.
Я по мнению сообщества безграмотен,могу дать вредные или ошибочные советы.
Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).

С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki - ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/. ) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/. ).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
Подключение управляющих выводов драйвера:
Для подключения управляющих выводов можно использовать одну их следующих схем:

Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
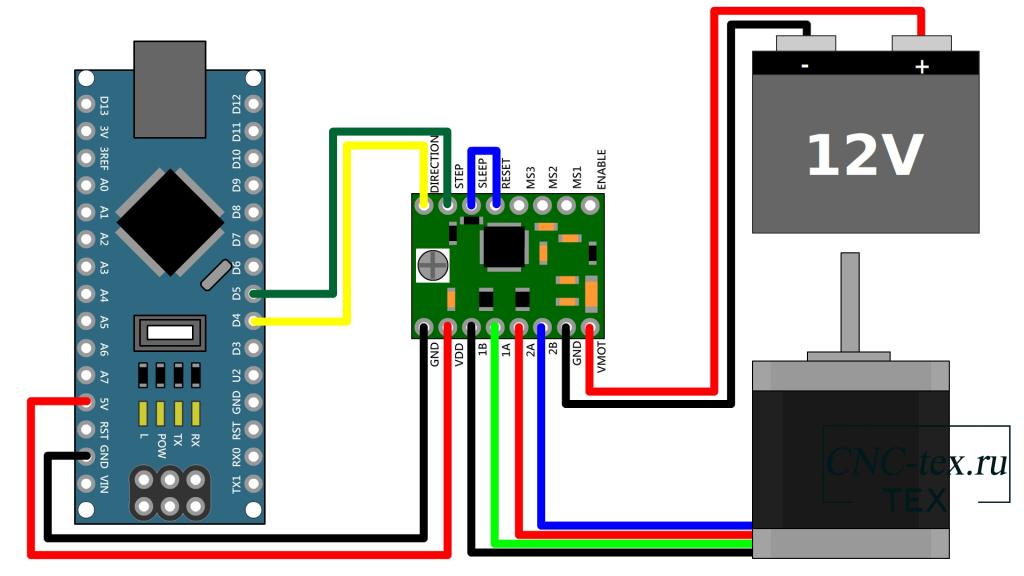
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.

Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
Данный скетч выполняет те же действия что и предыдущий. Но подача импульсов на вывод PUL осуществляется не в цикле основного кода, а по прерываниям от таймера.
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.
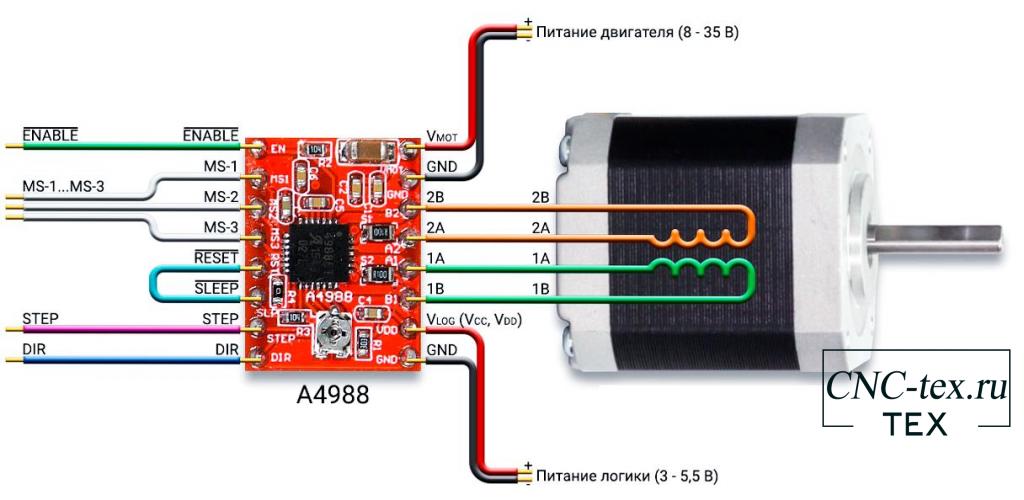
Драйвер шагового двигателя A4988 является электронным устройством, которое заставляет вращаться шаговый двигатель, путем совершение шагов. Данное устройство незаменимо при разработке высокоточных ЧПУ станков и 3D принтеров.
Применение драйвера для шагового двигателя A4988.
Для создания высокоточных станков используют шаговые двигатели, которые обладают рядом преимуществ перед коллекторными двигателями:
- Шаговый двигатель быстро стартует, останавливается и совершает реверс.
- Высокая точность перемещения и позиционирования.
- Позволяет позиционировать без применения обратной связи.
- Большой диапазон изменения скорости.
- Возможность обеспечивать низкую скорость вращения без применения редуктора.
Спектр применения шаговых двигателей очень большой. Вы пользуетесь офисной техникой и не подозреваете, что управляет вашим ксероксом, принтером, факсом, 3D принтером шаговые двигатели.
Управляет шаговым двигателем драйвер. Driver с английского языка «водитель». Одним из недорогих драйверов, и в связи с этим достаточно популярным, является драйвер A4988. Модуль A4988 имеет защиту от перегрузки и перегрева. Одним из параметров шаговых двигателей является количество шагов на один оборот 360°. Например, для шаговых двигателей Nema17 это 200 шагов на оборот, т.е 1 шаг равен 1.8°. Драйвер A4988 позволяет увеличить это значение за счёт возможности управления промежуточными шагами и имеет пять режимов микрошага (1(полный), 1/2, 1/4, 1/8 и 1/16).
Технические характеристики A4988.
Распиновка драйвера A4988.
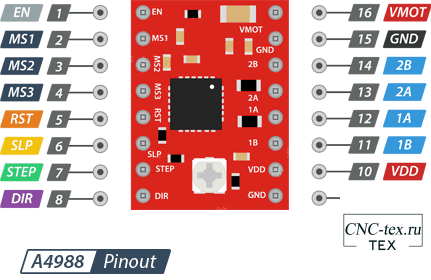
Драйвер A4988 имеет всего 16 контактов, которые позволяют управлять шаговыми двигателями. Распиновка у A4988 следующая:
Назначение контактов драйвера A4988.
- ENABLE – включение/выключение драйвера
- MS1,MS2,MS3 – контакты для установки микрошага
- RESET - сброс микросхемы
- STEP - генерация импульсов для движения двигателей (каждый импульс – шаг), можно регулировать скорость двигателя
- DIR – установка направления вращения
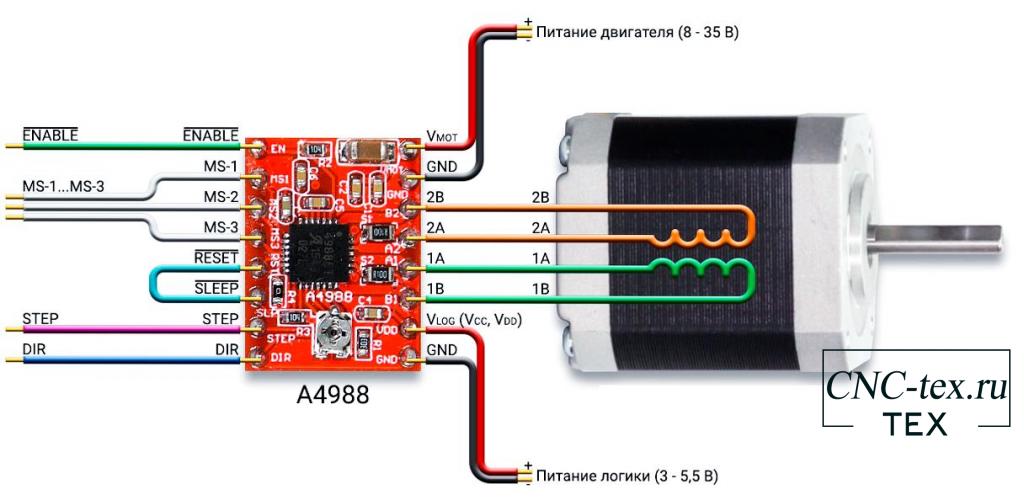
- VMOT – питание для двигателя (8 – 35 В)
- GND – общий
- 2B, 2A, 1A, 1B – контакты для подключения обмоток двигателя
- VDD – напряжение питания микросхемы (3.5 –5В)
Выводы выбора микрошага.
Драйвер A4988 допускает использование режима микрошага. Это достигается за счет подачи питания на катушки с промежуточными уровнями тока.
Например, если вы решите управлять шаговым двигателем NEMA 17 с шагом 1,8 градуса (200 шагов на оборот) в режиме 1/4 шага, то двигатель будет выдавать 800 микрошагов на оборот.
Драйвер A4988 имеет три вывода селектора размера шага (разрешения), а именно: MS1, MS2 и MS3. Установив соответствующие логические уровни на эти контакты, мы можем настроить двигатели на одно из пятиступенчатых разрешений.
Выводы выбора микрошага драйвер A4988.
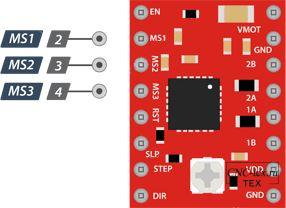
По умолчанию эти три контакта подтянуты к земле внутренним резистором. Если мы оставим эти выводы не подключенными, то двигатель будет работать в режиме полного шага.
Выводы управления.
Драйвер A4988 имеет два управляющих вывода, а именно: STEP и DIR.
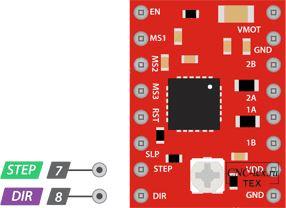
STEP — управляет микрошагом мотора. Каждыйвысокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращаться по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Выводы STEP и DIR не подтянуты внутренними резисторами, поэтому вы не должны оставлять их не подключенными.
Выводы управления питанием A4988.
A4988 имеет три различных вывода для управления состоянием питания, а именно. EN, RST и SLP.
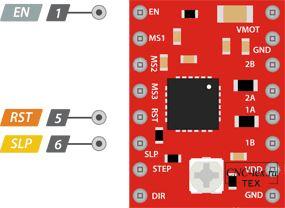
EN — вывод включения (0)/ выключения (1) драйвера A4988. По умолчанию на этом выводе установлен низкий уровень, поэтому драйвер всегда включен.
SLP — подача на данный вывод сигнала низкого уровня переводит драйвер в спящий режим, сводя к минимуму потребление энергии. Вы можете использовать этодля экономии энергии.
RST — при подаче сигнала низкого уровня все входные данные STEP игнорируются, до тех пор, пока не будет установлен высокий уровень. Низкий уровень также сбрасывает драйвер, устанавливая внутренний транслятор в предопределенное состояние Home. Исходное состояние — это в основном начальное положение, с которого запускается двигатель, и оно различается в зависимости от разрешения микрошага.
Выводы для подключения шагового двигателя.
Выходные контакты: 1B, 1A, 2A и 2B.
К этим выводам можно подключить любой биполярный шаговый двигатель с напряжением питания от 8 до 35 В.
Каждый выходной контакт модуля может обеспечить ток до 2 А. Однако величина тока, подаваемого на двигатель, зависит от источника питания системы, системы охлаждения и настройки ограничения тока.
Система охлаждения — радиатор.
Чрезмерное рассеивание мощности микросхемы драйвера A4988 приводит к повышению температуры, которая может выйти за пределы возможностей микросхемы, что, вероятно, приведет к ее повреждению.
Даже если микросхема драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, микросхема может подавать только около 1 А на катушку без перегрева.
Для достижения более 1 А на катушку требуется радиатор или другой метод охлаждения.
Драйвер A4988 обычно поставляется с радиатором. Желательно установить его перед использованием драйвера.
Ограничение тока.
Перед использованием драйвера нам нужно сделать небольшую настройку. Для этого нужно ограничить максимальный ток, протекающий через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.
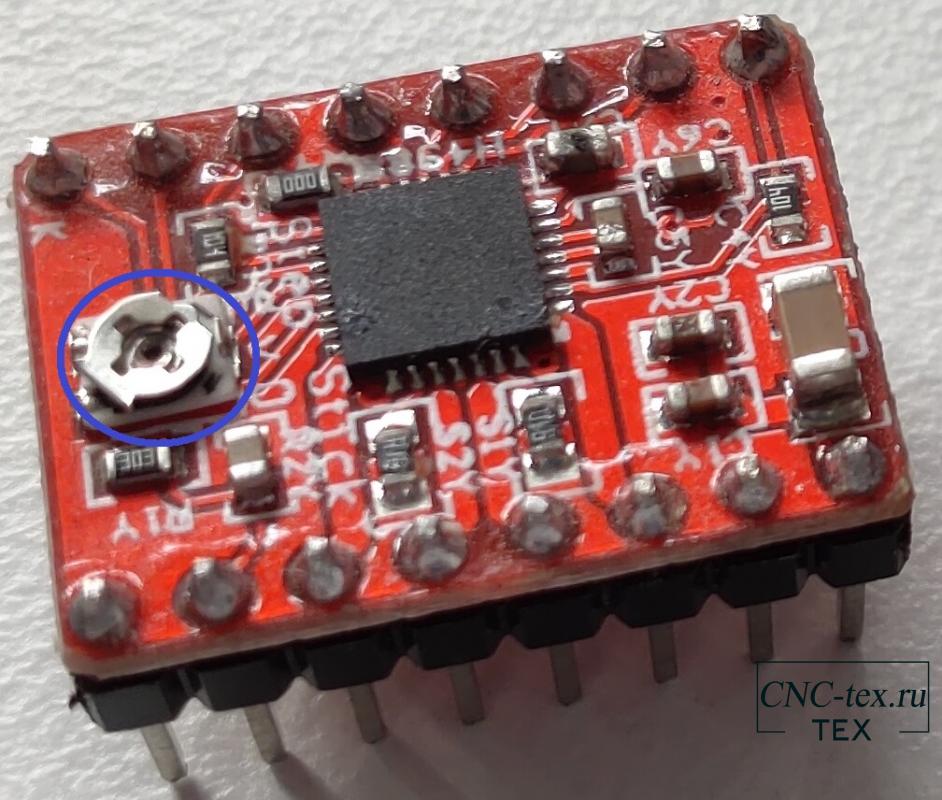
На драйвере A4988 есть небольшой потенциометр, который можно использовать для установки ограничения тока. Вы должны установить ограничение по току равным или ниже номинального тока двигателя.
Расчет и установка ограничещего тока драйвер шагового двигателя A4988.
В данном случае мы собираемся установить ограничение тока путем измерения напряжения (Vref) на выводе «ref».
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. Для примера расчета будем использовать NEMA 17 200 шагов/об, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP.
- Во время регулировки измерьте напряжение Vref (один щуп мультиметра на минус питания, а другой к металлическому корпусу потенциометра).
- Отрегулируйте напряжение Vref по формуле:
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
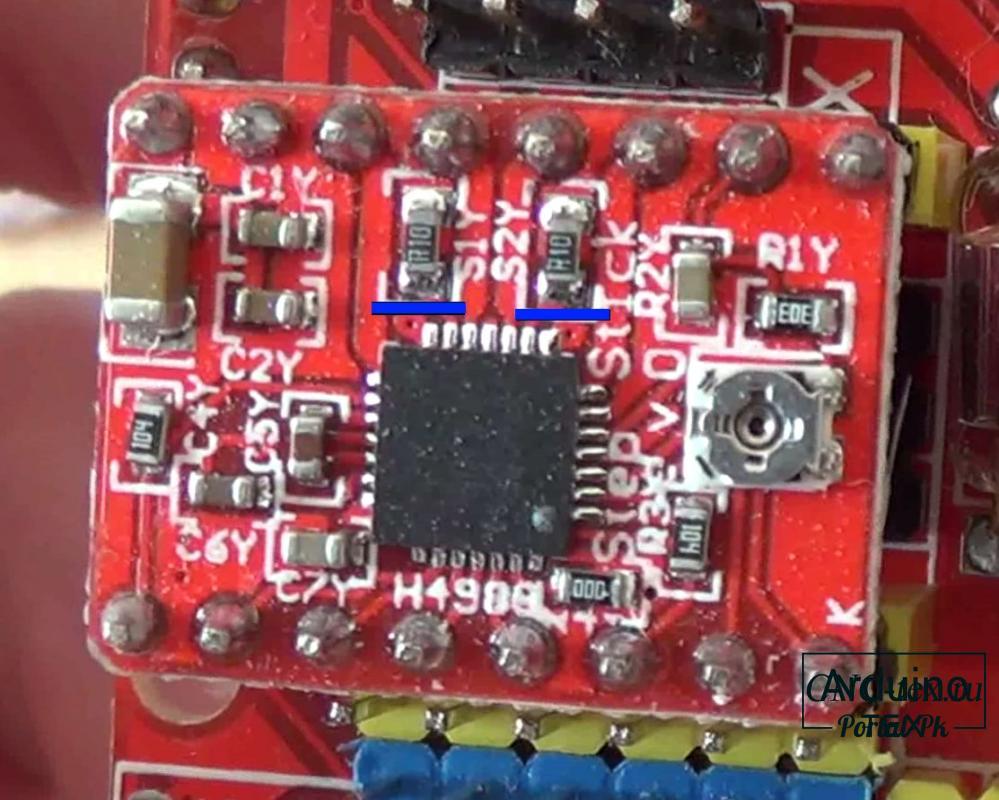
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
- Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Vref = 1,2 * 8 * 0,100 = 0,96 В
Vrefист. = 0,96*0,7 = 0 ,672 В.
Электроника для ЧПУ станков, в которой можно использовать драйвер шагового двигателя A4988.
Драйвер шагового двигателя A4988 можно подключить к микроконтроллеру, например к Arduino, напрямую.
Скетч вращения шагового двигателя NEMA 17, драйвер A4988.
Программа для вращения шагового двигателя NEMA 17, драйвер A4988. Сначала мотор совершает полный оборот в одну сторону, потом в другую.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
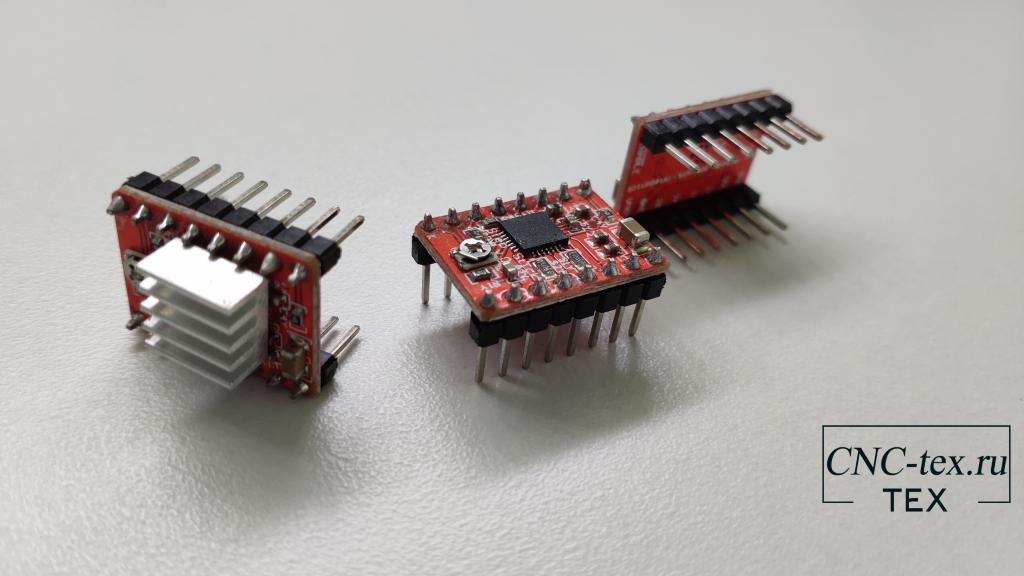
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.
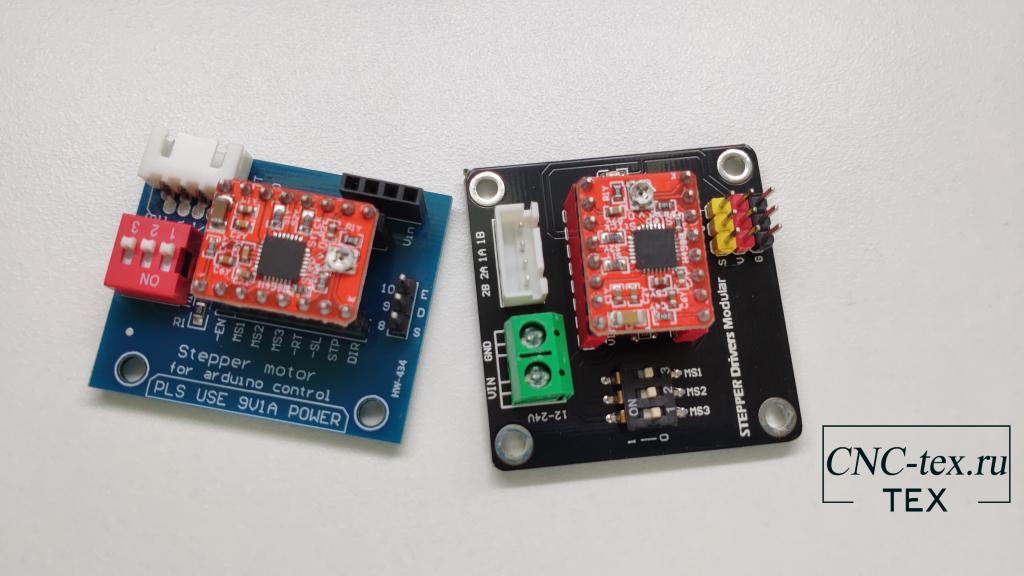
Распиновку и как подключать модуль драйвера A4988 будем рассматривать в следующей статье.
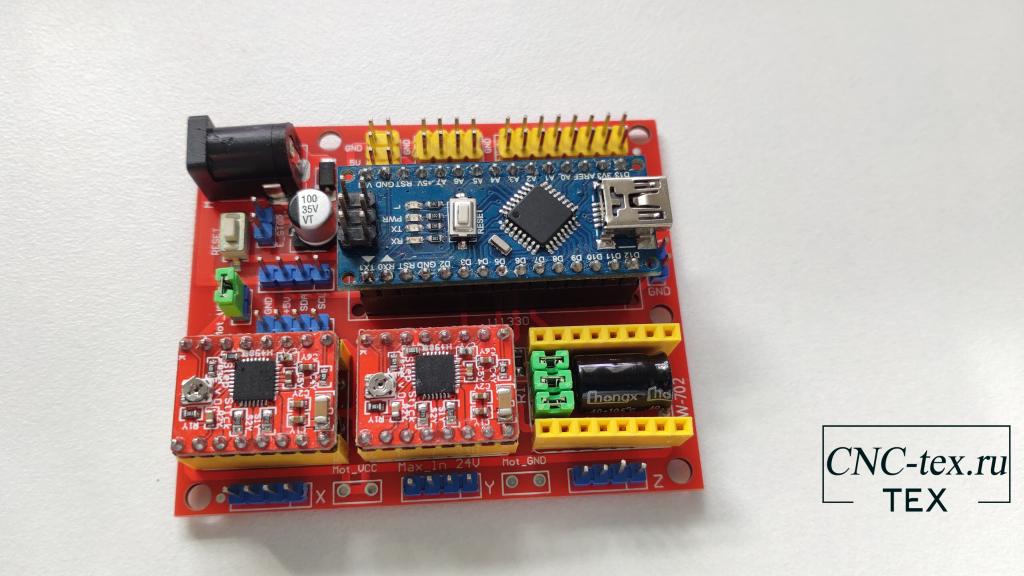
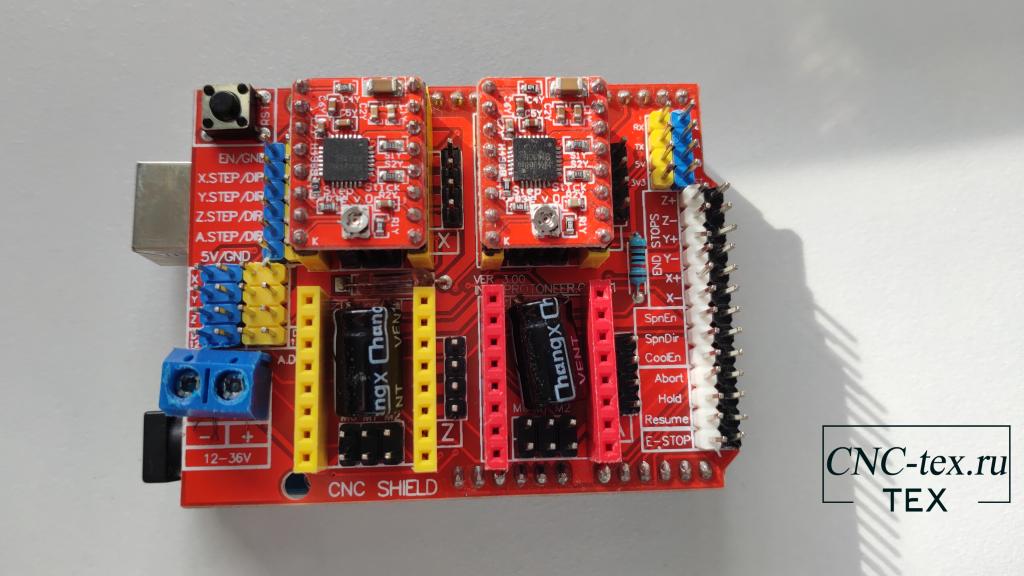
Использование драйвера A4988 с CNC shield v3 и CNC shield v4.
Драйвер A4988 можно установить на CNC shield v3 и CNC shield v4. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
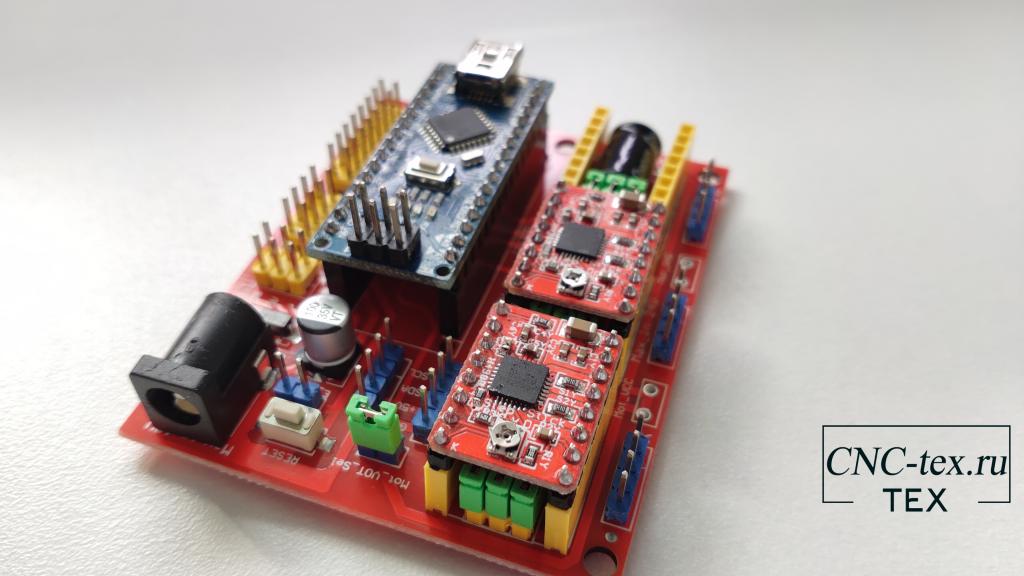
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки.
Более подробно CNC shield v3 и CNC shield v4 будем рассматривать в следующих статьях.
Мы еще не рассмотрели использование данных драйверов для создания 3D принтеров на основе Ramps. Но это совсем другая история.
Вывод можно сделать следующий. Не смотря на свою небольшую стоимость и небольшой размер, драйвера отлично подходят для реализации большого количества проектов. От самодельных станков, до роботов манипуляторов.
Понравился Драйвер шагового двигателя A4988? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.

В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно

КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Также, как и шаговый двигатель с четырехконтактным соединением, униполярный двигатель с 6 проводами имеет пару проводов для каждой обмотки. Однако, он также имеет центральный вывод для каждой обмотки, что дает возможность подключать его как в качестве биполярного шагового двигателя, так и в качестве однополярного.

Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.

Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
Читайте также: