
Настроить драйвер шагового двигателя dm860s
Обновлено: 02.07.2024
Сейчас на странице 0 пользователей
Нет пользователей, просматривающих эту страницу.
Похожие публикации
Всех приветствую, нужна помощь, на станке GARD 9060 двигатель на ось Y голову делает, помогите найти движок на аналоге такого же, в интернете по маркировке такого, который у меня, ничего не нашёл. Фото прилагаю
Всем привет.Умер шаговый движок Leadshine 863S22 Nema34, стоящий на оси Х. Ну, как умер, посреди резки начал издавать странные звуки, выть и странно дергаться., Хочет крутит, хочет нет.
Открутил, снял, положил "на спину" - крутить начал нормально с нормальными звуками. Вернул в боевое положение - опять глючит. Разобрал - визуально все отлично. Собрал - поведение прежнее.
В общем, решил менять. По нашим магазинам не нашел. Везде по заказу. Вариант только алиэкспресс. Но ближайшая доставка с али 19 октября. А это застрелиться как поздно.
Внимание вопрос, возможно ли заменить его наименее хлопотно на что-то другое, более доступное? С драйвером, без драйвера - лишь бы побыстрее. Плата станка Topwisdom TZC-CON1V15 2010.3. Вообще, впервые столкнулся с такой проблемой.
Буду благодарен любому совету
Добрый день.
Есть задача автоматизировать подъемную колонну волоконного маркера.
С кинематикой все понятно. Есть ШД, есть переходная пластина и есть крепление на вал ШВП.
Снимаю штурвал (ручной) и на его место прикручиваю ШД.
Что бы сильно не заморачиваться с электроникой решил воспользоваться готовыми ПЛК и простенькой панелью оператора.
В качестве ПЛК взял на пробу китайский клон FX1N и панель оператора OP320A.
Судя по описанию FX1N поддерживает импульсный вывод с частотой до 100 кГц на выходах Y000, Y001.
Два дня пытаюсь понять как запустить этот самый генератор импульсов но пока безрезультатно.
Язык релейной логики мне как-то совсем не понятен, а в инете только о нем и упоминается в связке с термином DRVA.
Вопрос: Как сие чудо заставить выдать пачку импульсов? Знаком с языком ST. Он отдаленно напоминает смесь бейсика паскаля и Си.
Кто либо пробовал сделать нечто подобное?
И как воспользоваться этой DRVA из ST?

Введение
DM860 - это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP, основанного на новейшей технологии управления движением. Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и исключает среднюю нестабильность.
По сравнению с традиционными аналоговыми приводами DM860 может управлять шаговым двигателем с гораздо меньшим уровнем шума,
меньший нагрев и более плавное движение. Его уникальные особенности делают DM860 идеальным выбором для приложений с высокими требованиями.
Особенности
Использование
Подходит для широкого диапазона шаговых двигателей, от NEMA размера 17 до 42. Он может использоваться в различных типах машин, таких как XY столы, гравировальные машины, этикетировочные машины, лазерные резаки, устройства для захвата и т. Д. Особенно подходит для желаемых приложений с низким уровнем шума, низким нагревом, высокой скоростью и высокой точностью.
Характеристики
Электрические характеристики (T j = 25/77)
Ток логического сигнала
Операционная среда и другие характеристики
Избегайте попадания пыли, масляного тумана и агрессивных газов.
Температура окружающей среды
Прибл. 620 г (21.7 унции)
Механические характеристики ( единица измерения: мм [дюйм] )

Рисунок 1: Механические характеристики
* Рекомендуется использовать боковой монтаж для лучшего отвода тепла
Устранение тепла
- Надежная рабочая температура водителя должна быть <70 ℃ (158 ℉), а рабочая температура двигателя должна быть <80 ℃ (176 ℉);
- Рекомендуется использовать автоматический режим холостого хода, а именно: ток автоматически снижается до 50% при остановке двигателя, чтобы уменьшить нагрев драйвера и нагрев двигателя;
- Рекомендуется устанавливать драйвер вертикально, чтобы увеличить площадь радиатора. При необходимости используйте метод принудительного охлаждения для охлаждения системы.
Назначение контактов и описание
DM860 имеет два разъема: разъем P1 для подключения сигналов управления и разъем P2 для подключения питания и двигателя. В следующих таблицах приведены краткие описания двух разъемов. Более подробное описание контактов и связанных проблем представлено в разделах 4, 5, 9.
Разъем P1 Конфигурации
Detчеснокs
Разъем P2 Конфигурации
В постоянного тока
Источник питания, 24
80 В постоянного тока, включая напряжениеtage колебания и объем ЭДСtage.
Фаза двигателя А
Фаза двигателя B
4. Интерфейс разъема управляющего сигнала (P1)
DM860 может принимать дифференциальные и несимметричные входы (включая выход с открытым коллектором и PNP). DM860 имеет 3 оптически изолированных логических входа, которые расположены на разъеме P1 для приема сигналов управления драйвером линии. Эти входы изолированы, чтобы минимизировать или устранить электрические шумы, связанные с сигналами управления приводом. Рекомендуется использовать управляющие сигналы линейного драйвера для повышения помехоустойчивости драйвера в условиях помех. На следующих рисунках показаны подключения к сигналам с открытым коллектором и PNP.
![Разъем управляющего сигнала (P1) Интерфейс]()
5. Подключение двигателя

DM860 может управлять любыми 2-х и 4-х фазными гибридными шаговыми двигателями.
Подключение к 4-выводным двигателям
4-выводные двигатели наименее гибкие, но их проще всего подключить. Скорость и крутящий момент будут зависеть от индуктивности обмотки. При настройке выходного тока драйвера умножьте указанный фазный ток на 1.4, чтобы определить пиковый выходной ток.


Рисунок 5: Подключение 4-выводного двигателя
Подключение к 6-выводным двигателям

Рисунок 6: Подключение полукатушки 6-выводного двигателя (более высокая скорость)
Полная конфигурация катушки
Конфигурация с полной обмоткой шестиступенчатого двигателя должна использоваться в приложениях, где желателен более высокий крутящий момент при более низких скоростях. Эта конфигурация также называется полной медью. В режиме полной обмотки двигатели должны работать только при 70% номинального тока, чтобы предотвратить перегрев.

Рисунок 7: Соединения с полной обмоткой 6-выводного двигателя (более высокий крутящий момент)


Выбор источника питания
DM860 совместим с шаговыми двигателями среднего и малого размера (от типоразмера NEMA от 17 до 34), производимых многими производителями двигателей по всему миру. Для достижения хороших ходовых качеств важно выбрать объем питания.tage и выходной ток должным образом. Вообще говоря, объем поставкиtage определяет высокоскоростные характеристики двигателя, а выходной ток определяет выходной крутящий момент ведомого двигателя (особенно на более низкой скорости). Более высокий объем предложенияtage позволит достичь более высокой скорости двигателя за счет большего шума и нагрева. Если требования к скорости движения низкие, лучше использовать меньшую мощность питания.tage для уменьшения шума, нагрева и повышения надежности.
Регулируемый или нерегулируемый источник питания
Для питания драйвера могут использоваться как регулируемые, так и нерегулируемые источники питания. Однако нерегулируемые источники питания предпочтительны из-за их способности выдерживать скачки тока. Если регулируемые источники питания (например, большинство импульсных источников) действительно используются, важно иметь большой выходной ток, чтобы избежать таких проблем, как ток cl.amp, напримерample, используя источник питания 4A для работы двигателя с драйвером 3A. С другой стороны, если используется нерегулируемый источник питания, можно использовать источник питания с более низким номинальным током, чем у двигателя (обычно 50% - 70% тока двигателя). Причина в том, что драйвер потребляет ток от конденсатора источника питания нерегулируемого источника питания только во время включения цикла ШИМ, но не во время отключения. Следовательно, средний ток, потребляемый от источника питания, значительно меньше тока двигателя. Для бывшегоampТо есть, два двигателя на 3А могут питаться от одного источника питания на 4А.
Несколько драйверов
Рекомендуется использовать несколько драйверов для совместного использования одного блока питания, чтобы снизить стоимость, если блок питания имеет достаточную мощность.
Во избежание перекрестных помех НЕ подключайте последовательно входные контакты источника питания драйверов. (Вместо этого подключите их к источнику питания отдельно.)
Выбор Supply Vol.tage
Силовые МОП-транзисторы внутри DM860 могут фактически работать в диапазоне +24
+ 110 В постоянного тока, включая колебания входной мощности и напряжение обратной ЭДС.tage генерируется обмотками двигателя при торможении вала двигателя. Более высокий объем предложенияtage может увеличивать крутящий момент двигателя на более высоких скоростях, что помогает избежать потери шагов. Однако чем выше объемtage может вызвать более сильную вибрацию двигателя на более низкой скорости, а также может вызвать перенапряжениеtage защита или даже повреждение водителя. Поэтому рекомендуется выбирать только достаточно высокий объем питания.tage для предполагаемых приложений, и рекомендуется использовать блоки питания с теоретической выходной мощностьюtage +20
+ 68 В постоянного тока, оставляя место для колебаний мощности и противо-ЭДС.
Выбор разрешения микрошага и выходного тока драйвера

Выбор разрешения микрошага
Разрешение микрошага устанавливается переключателями SW5, 6, 7, 8 DIP-переключателя, как показано в следующей таблице:
Определние на какой микрошаг настроен драйвер шагового мотора для чайников.
Откройте блок блок управления и найдите место,
где в нём установлены коробочки примерно такого вида:
Число коробочек и число осей станка должно совпадать.
если есть поворотная ось,то для неё как может быть отдельная коробочка,как и нет.
В этом случае вам при продаже станка должны были сказать,
что поворотная ось подключается вместо одной из линейных осей.
Также на станках улучшенной конструкции на некоторые оси может быть установлен не один мотор,
а два в крайнем положении оси каждый.
Такая конструкция делается для того,чтобы более точно позиционировать инструмент по краям рабочего поля.
При правильном подключении такие моторы подключаются к ЧПУ не зависимо друг от друга и то,
что они управляют одной осью задаётся соответсвующими настройками внутри ЧПУ собственно.
На одной из коробочек найдите таблицу соответствия числа шагов и положения переключателей для настройки микрошага.
Выглядит обычно эта таблица так:
Первый столбец этой таблицы назван Pulse/Rev,то есть число шагов на один оборот двигателя.
Вообще говоря,хотя угол,на который поворачивается двигатель при одном полном шаге и стандартен,
но в стандарте есть и другие значения угла поворота двигателя при полном шаге.
Например LeadShine производит двухфазные двигатели с углами поворота в 0,9 и 1,8 градуса.
Соответственно на один оборот будет приходиться в первом случае 360/0,9=400 шагов.
Во втором случае только 200.
Но тем не менее в таблице указан не микрошаг,а число шагов на оборот для конкретного двигателя.
Чтобы получить от туда микрошаг разделим число шагов на оборот в каждой строке на число
шагов двигателя для которого сделана таблица.
Для какого двигателя делалась таблица на каробке драйвера не объясняется,поэтому будем его угадывать.
Наиболее распространённый вариант двигателя имеет 200 шагов на оборот.
Делим на него числа из таблицы и получаем последовательность
200:200=2^0=1 (Целый,не дроблёный шаг,в таблице вместо 200 стоит слово default )
400:200=2^1=2
800:200=2^2=4
1600:200=2^3=8
3200:200=2^4=16
6400:200=2^5=32
12800:200=2^6=64
25600:200=2^7=128
Отношения совпадают со степенями двойки,так что похоже,что предположение о том,
что таблица составлена для двигателя с 200 шагами на оборот правильное.
То что указано справа и есть микрошаг - отношение числа микрошагов к одному полному шагу двигателя.
Чтобы определить на какой микрошаг настроен драйвер,посмотрим на названия других столбцов таблицы.
Они называются SW5,SW6 и SW7.
Так обычно называют всякие переключатели и выключатели.
Теперь поищем их,обычно они находятся на верху между двумя группами клем,
но могут быть выведены и в другом месте.
Осматриваем драйвер и находим вот это:
Переключатель справа круговой,а значит принимать сразу значения из всех трех столбцов не может.
А вот слева есть набор из 8 тумблеров и так как никаких других переключателей у драивера нет,
предпологаем.чтоименно их и имеют ввиду в этой таблице и смотрим на положение 5,6 и 7 тумблера соответственно.
Видим что все они в верхнем положении,но что это значит,ON или OFF?
Слева внизу на тумблере есть надпись ON и указывающая на него стрелка.
Значит положение переключателя внизу означает что он включен (ON).
А все три переключателя в верхнем положении,значит они в состоянии OFF.
Ищем соответствующею строку в таблице и видим,что ей соответствует микрошаг 128.
При таком микрошаге драйвер может работать не стабильно,поэтому уменьшим его 8.
Смотрим в таблице положение выключателей для такого микрошага и видим,
что для перенастройки драйвера на него надо переключатели SW5,SW6 надо оставить в положении OFF,
а переклячатель SW7 опустить в низ в состояние ON.
Выключам станок,коли он у вас был включен и переключаем тумблеры.
Готово,теперь у нас микрошаг 8 и теперь остаётся только соответственно перенастроить ЧПУ,
а то будет изменение маштаба в 128:8 раз.
Число коробочек и число осей станка должно совпадать.
если есть поворотная ось,то для неё как может быть отдельная коробочка,как и нет.
На станках с большим полем на одну ось может стоять 2 драйвера и два двигателя.
Я по мнению сообщества безграмотен,могу дать вредные или ошибочные советы.
Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
Поправь тогда и деление. 400 - это деление на 2. Дефолт - 1 к 1. Самые распространенные моторы имеют шаг 1.8 градуса. С шагом 0.9 редкость.
Я по мнению сообщества безграмотен,могу дать вредные или ошибочные советы.
Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.

Как известно, драйверы шаговых двигателей компании Leadshine серий AM, EM и DM обладают рядом уникальных функций.
Однако, чтобы воспользоваться преимуществами этих функций в полной мере, драйверы необходимо настроить. Выполняется настройка с помощью специального фирменного ПО - ProTuner. Для настройки потребуется компьютер под управлением Windows, оснащенный COM-портом, а также кабель Leadshine RS232-RJ12.
Подключаем драйвер к COM-порту компьютера с помощью кабеля, устанавливаем ProTuner на компьютер, подаем питание на драйвер.
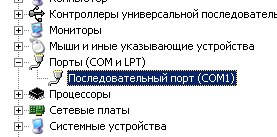
После запуска ProTuner будет предложено выбрать COM-порт для установки связи с драйвером. Номер порта можно посмотреть в диспетчере устройств:
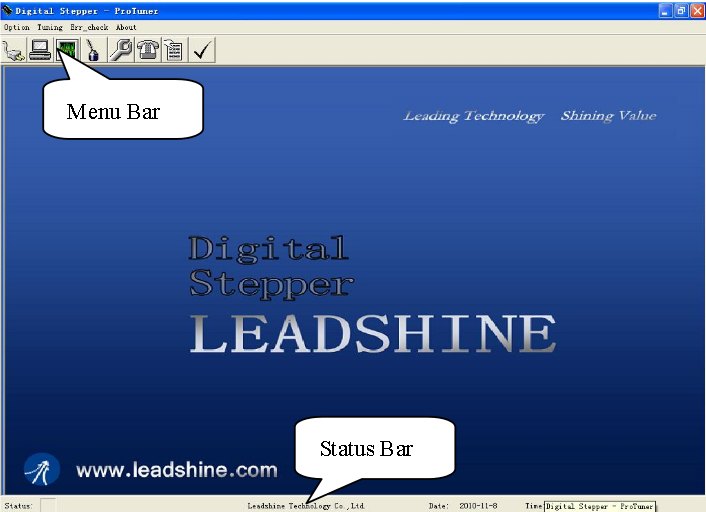
После успешного запуска будет показано основное меню ProTuner:
Настройка контура регулирования обмоток шагового двигателя
Настройка драйвера начинается с пункта меню Tuning, где настраиваются параметры ПИ-регулятора уровня тока в обмотках двигателя. На графике отражается изменение тока во времени, оранжевая линия показывает эталонный уровень тока, зеленый - реальный ток. В идеале график должен быть правильной прямоугольной формы. Значение I-test задает требуемый уровень тока - он должен быть равен рабочему току обмоток двигателей.
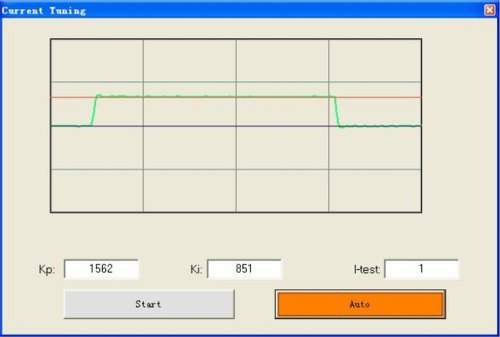
Настройка ПИ-регулятора заключается в подборе двух параметров - пропорционального Kp и интегрального Ki.
Пропорциональный коэффициент Kp соответствует названию - результат его влияния в том, что чем больше разница между нужным уровнем тока и реальным током обмотки, тем быстрее происходит изменение тока драйвером. Большие значения пропорционального коэффициента приводят к возникновению колебаний в регулируемом процессе.
Интегральный коэффициент обладает сглаживающим эффектом, и устраняет т.н. статическую ошибку. Слишком малые значения Ki приводят к тому, что статическая ошибка не компенсируется до конца, слишком большие значения приводят к тому, что уровень тока "плавает" вокруг необходимого значения.
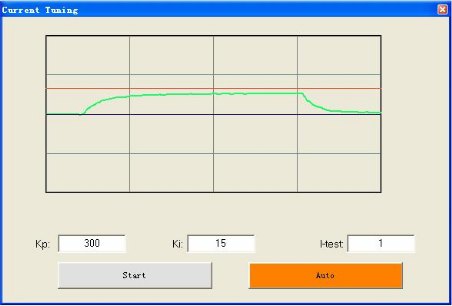
Ниже пример неудачно настроенного контура. Слишком маленький пропорциональный коэффициент Kp привел к тому, что ток слишком медленно меняется, причем скорость изменения падает по мере приближения к заданному уровню, а интегральный коэффициент Ki=15 оказался недостаточен для компенсации статической ошибки - в результате ток так и не достигает нужного уровня за шаг.
Можно также воспользоваться функцией автоматического подбора параметров, нажав кнопку Auto. При этом драйвер самостоятельно протестирует обмотки и выберет подходящие коэффициенты. Именно это происходит при вкл/выкл переключателя SW4(см. документацию на AM882).
Примечание. Производитель рекомендует настраивать параметры на ненагруженном двигателе.
Настройка основных параметров драйвера
После настройки контура тока можно перейти к настройке продвинутых функций драйверов Leadshine. Они настраиваются в окне System Config:
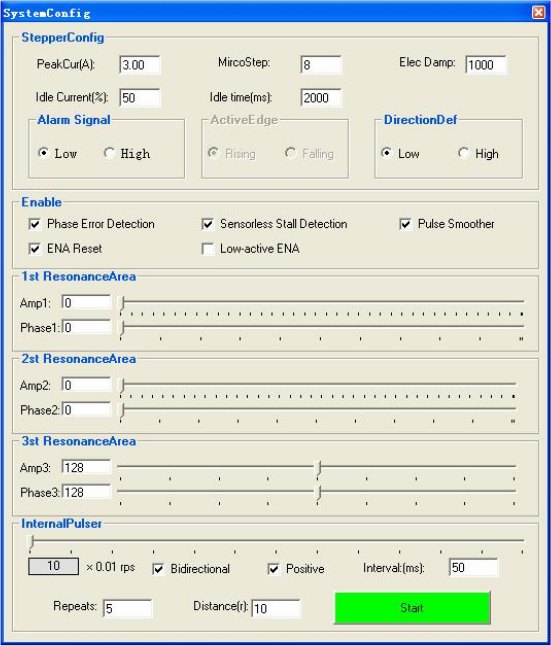
PeakCur(A) - пиковый ток в обмотке шагового двигателя. Обратите внимание, что производителями ШД указывается среднеквадратичное значение тока!
Microstep - если DIP-переключатели установлены нужным образом(см. документацию на драйвер), можно задать точное деление шага с помощью этого параметра.
Elec Damp - "коэффициент электронного демпфирования". Данное число используется как некий коэффициент в антирезонансных алгоритмах. Алгоритмы подавления резонанса Leadshine держатся в секрете, поэтому точное назначение параметра неизвестно, однако известно, что данный коэффициент полезен при устранении вибраций, а также есть рекомендация производителя - сперва настроить коэффициенты 3 резонансных областей со значением коэффициента по умолчанию, прежде чем переходить к подбору Elec Damp - возможно, подбор не потребуется.
Idle Current - величина тока удержания(при простое мотора) в % от рабочего тока.
Idle time - время простоя мотора, после истечения которого ток снижается до уровня, заданного предыдущим параметром.
Phase Error Detection - задает, будет ли драйвер диагностировать ошибки, связанные с функционированием обмоток мотора и выдавать сигнал аварии. Лучше всегда оставлять включенным.
Sensorless stall detection - функция определения момента остановки вала двигателя. При включенной функции драйвер постарается определить, когда произошел внезапный останов вала(вал заклинило или он остановился по другой причине, например из-за пропуска шагов) и выдаст сигнал аварии на выход ALM. Отключать данную функцию стоит только если есть подозрения на ложные срабатывания, а также если не планируется использовать выход аварии драйвера для остановки всего станка.
ENA Reset - при установленной галочке драйвер можно вывести из состояния "авария" без выключения питания, с помощью снятия-подачи сигнала ENABLE.
Low-active ENA - данная функция инвертирует уровень сигнала ENABLE. Аналогично, уровни сигналов ALM и DIR выбираются соответствующими переключателями.
Pulse smoother - алгоритм сглаживания периода поступающих импульсов STEP. Назначение данной функции в том, чтобы немного сгладить негативные эффекты, связанные с нестабильностью входящих импульсов. Так, например, программа Mach3 генерирует сигнал на пинах LPT-порта с крайне большой дисперсией периода импульсов - такая неравномерность очень негативно сказывается на максимально достижимой скорости станка. Однако, данную функцию лучше отключить - работающий фильтр импульсов отключает мультистеппинг. Это особенность всех драйверов Leadshine, не является ошибкой, а осознанным решением производителя. Польза от мультистеппинга видится гораздо большей, чем от фильтра импульсов по той причине, что неравномерность STEP, генерируемых Mach3 настолько велика, что её не сгладить никаким фильтром, а вибрации ШД на низких частотах - очень серьезная проблема, которая почти полностью устраняется мультистеппингом:
Настройка параметров резонансных областей
В драйверах Leadshine AM,EM и DM выделены 3 диапазона скорости вращения ШД, в которых наиболее вероятно возникновение вибраций. Для их устранения предоставляется возможность настройки 2 параметров для каждой области - коррекция соотношения амплитуды тока обмоток и сдвиг фаз. Порядок настройки не регламентируется производителем, даются лишь несколько рекомендаций:
1) Производить настройку на ненагруженном моторе(без подсоединения приводного винта/ремня)
2) Все подстройки ползунками производить на предварительно четко выделенной резонансной частоте вращения.
Ниже описана методика, предлагаемая Михаилом Юровым.
С помощью встроенного генератора импульсов двигатель раскручивается до появления вибрации (первая резонансная область соответствует скорости примерно 0.5-1.2 об/сек, вторая - 1.2-2.5 об/сек, третья 2.5-5 об/сек.)
Ползунок амплитуды перемещается таким образом, чтобы добиться максимальной вибрации, после чего легко подобрать частоту наибольшего резонанса. Зафиксировав частоту, используя ползунки коррекции амплитуды и сдвига фаз добиться максимально плавного движения(хотя бы на слух). После настройки на данной частоте - скорость вращения увеличивается до проявления вибрации в следующей области.
Читайте также: