
Программа для fpv камеры android
Обновлено: 04.07.2024
В последнее время дроны набирают особую популярность, это интересная и захватывающая вещь, которая позволяет снимать видео или просто любоваться красотой природы. Перед началом использования убедитесь, что у вас есть все для безопасного полета. Сюда входит не только ПО или приложения, но и дополнительные инструменты для улучшения процесса полета.
Мы подскажем какие приложения созданы для этого, и вы сможете максимально насладиться одним из самых увлекательных занятий. В зависимости от ваших предпочтений вспомогательные инструменты могут отличаться.
Google Earth
После регистрации дрона, вам необходимо узнать все доступные места для полетов. Сегодня для этого будет не одно приложение и все они отлично показывают безопасные территории. Конечно, это несомненно важно, но вы можете заглянуть в Google Earth, чтобы найти самые потрясающие красоты нашей планеты. Это приложение абсолютно бесплатно для вашего смартфона и доступно в магазине.
Airmap
Этот инструмент предлагает вам гораздо больше, чем просто картографирование или сбор данных о полёте. Данное приложение предназначено для коммерческих предложений при поддержке мировых компаний: Microsoft, Qualcomm, Yuneec. Здесь доступны: регистрация полетов, отслеживание дронов на карте и просмотр зоны ограждения. Кроме того, вы сможете включить уведомления о дорожной обстановке в реальном времени. Приложение можно использовать, как индивидуально, так и для бизнеса. К тому же, оно бесплатное.
Hover
Одно из замечательных приложений, которое предоставляет вам информацию о местоположении и данные карты от Airmap. Но это еще не все. К тому же, оно расскажет вам о погоде. Hover учитывает ветер, видимость и многие другие факторы, а затем делает вердикт о безопасности полета. В целом это интересное приложение, если ваша основная цель — это безопасный полет. Оно доступно в магазине и предоставляется совершено бесплатно.
DroneDeploy
Это мощный конкурент, среди других приложений для дронов. Оно обеспечивает расширенное планирование полета и автономное управление устройством. Вы можете задать координаты и наблюдать за полетом. Кроме того, оно позволяет управлять камерой во время полета и составлять 3D-карту местности с данными высот, размеров объектов и состоянием посевов. Приложение бесплатное и это здорово, ведь оно действительно крутое.
UAV Forecast
Данное приложение в основном делает главный акцент на погоде. Оно подскажет вам, безопасно ли сейчас летать, а также предоставит данные о направлении ветра, температуре, облачности, видимости и многом другом. Кроме того, но не уступает своим конкурентам и позволяет вам пользоваться картами с видимыми бесполётными зонами. С точки зрения данных о погоде для полетов дронов это прекрасный сервис.
Kittyhawk
Мы уже рассмотрели множество приложений с разными функциями: начиная от прогноза погоды и заканчивая данными о местоположении. Теперь нам хочется представить вам сервис, который включает в себя все эти функции. Это Kittyhawk, надежное приложение, которое включает все от проверок до полета и анализа после. Данный сервис действительно очень хорош и позволяет вам максимально комфортно провести время.
Sun Surveyor (Sun & Moon)
Если вы хотя бы немного знакомы с фотографией, то вы знаете, что делать снимки на улице, да еще и при прямых солнечных лучах не так просто. Здесь нужно уметь управлять светом. При съемке с дрона это сделать еще сложнее, ведь там отсутствует тень. Чтобы не гадать с какой стороны солнце, а с какой луна, вы можете воспользоваться приложением Sun Surveyor. Оно определяет положение солнца и луны с высокой точностью. Сервис доступен по цене около 600 рублей.
Verifly
На сегодняшний день страхование является важной частью жизни современного человека. Мы конечно не ведем речь о страховании авто или какой-либо недвижимости, мы говорим о страховании ваших полетов. С помощью Verifly вы можете зарегистрировать начало и конец полета, и только после этого оплатить его. Цена страхования полета начинается от 750 рублей, в остальном сервис бесплатный.
Litchi для дронов GJI
Конечно, приложения DJI очень надежные и многофункциональные, но если вы ищете альтернативу, то Litchi прекрасно для этого подойдет. Самое привлекательное в нем, это полеты по путевым точкам и встроенные возможности VR/FPV. Приложение предоставляется по цене около 1.800 рублей.
Мы рассказали вам об одних их самых лучших приложений для максимальных возможностей ваших дронов.
Рассказываем и показываем как подключить дрон к телефону правильно. Подробнее о типах подключения, надежном креплении и лучших программах для Айфона и Андроида, читайте ниже.

Чтобы законнектить летательные аппараты к мобильнику, нужно сделать четыре действия.

Если в инструкции к коптеру нет нужного приложения, следует воспользоваться одним из 10 универсальных для iPhone и Android:
- FreeFlight Pro — работает с устройствами BEBOP и SCYCONTROLLER;
- DroneDeploy — приложуха для моделей DJI с расширенным планом полета и настройки автопилота;
- SYMA FPV — для работы с коптерами SYMA;
- Litchi — приложение управляет коптерами DJI Mavic / Phantom / Inspire / Spark;
- UgCS — еще одна аппка для DJI;
- Pix4D — универсальный скрипт, который позволяет заранее прописать траектории полета над местностью;
- DroneDeploy — программа для дронов DJI;
- Propeller Aero — приложение для детального изучения местности;
- Raptor Maps — универсальное приложение, что будет работать с многими дронами;
- Wi-Fi UFO — позволяет управлять дроном с мобильного. Главное, не отправлять его слишком далеко, иначе потеряется Wi-Fi коннект.
Подключение через WiFi
Предусмотрены три варианта, как подключить квадрокоптер к телефону:
- коннект с устройством через Wi-Fi;
- коннект к пульту через Wi-Fi;
- подключение через кабель к пульту.

Если есть возможность подсоединиться к пульту, — это самый простой вариант. Желательно им и воспользоваться. В пульте установлен более мощный приемник, с радиусом действия до 3 км (как DJI Mavic Mini). Если же подключить Wi-Fi к дрону через мобилку, девайс может отдалиться максимум на 30-50 метров. Сами понимаете, разница очевидна.
Для тех, кто интересуется, как работает Wi-Fi коннект: оба девайса объединяются в общую локальную сеть, где телефон передает данные по управлению дроном, а квадрокоптер принимает и мгновенно отзывается на них. В свою очередь, на мобильном видно, что снимает камера девайса.
Такая система контроля подойдет как для тех, кто только учится управлять квадрокоптерами (часто в дешевых моделях нет пульта). И для тех, кто хочет улучшить опыт съемок.
Продвинутые мобильные приложения для квадрокоптеров расскажут о погоде, силе ветра, разрешенных и запрещенных зонах для съемки и т.д.

Чем дальше будет улетать дрон, тем больше будет задержка между командой и движением летающего девайса. К примеру, улетев на 50 метров, бюджетная модель будет показывать изображение с задержкой в 2-3 секунды. Особенно остро эти цифры чувствуются в городской среде.
Управление дроном с помощью пульта или смартфона на выбор пользователя
Когда коптер подключится к телефону, можно смело приступать к волнующей части работы с дроном — управлением в полете.
Предусмотрены три варианта работы с устройством через мобилку.
1. Использование виртуальных кнопок внутри интерфейса программы
Мобилка выступает заменой джойстика.
2. Настройка режимов полета и тонкие подстройки камеры
Телефон заранее программирует автопилот «рейса», где можно проработать часто используемые или сложные полеты.
3. Всё, что «видит» камера, транслируется на дисплее смартфона
Юзер получает сбоку этого же изображения кнопки управления полетом. Получается такой себе авиасимулятор в режиме реальности под названием First Person View.
В целом, управление простое. Мобильные геймеры и вовсе будут как в «своей тарелке». Правят дроном так же, как и самолетом на авиасимуляторе. Если пользователь не особо играет в мобильные игры, он овладеет навыком управления коптером за 10-15 минут с помощью понятных подсказок, указанных в приложении по управлению квадрокоптером.
Четыре совета для начинающих.
- Не спешите сразу взимать в небо. Первые несколько полетов лучше провести на высоте 2-3 метра.
- Первые разы лучше запускать дрон подальше от высоток и деревьев — чтобы девайс случайно не врезался в них.
- Если приложение предлагает включить виброотдачу, следует этим воспользоваться. Прочувствуете управление через пульсацию.
- Для съемки в полете на превью выставлять минимальное качество изображения. FullHD видео сохраняется на microSD флешку, а вот «пиксельное» превью уменьшит задержку изображения.
Часто возникающие сложности и их решения: таблица
В большинстве случаев коннект квадрокоптера со средством управления проходит без сучка и задоринки. Однако иногда возникают проблемы, которые можно и нужно решать безотлагательно.

Основные траблы и их решения собраны в таблице:
Селфидрон — что это и как им управлять
Это тип квадрокоптеров, которые ориентированы исключительно на работу с мобилкой. У таких моделей не редкость отсутствие пульта. Поэтому устройство по стоимости дешевле в 2-3 раза привычного нам квадрокоптера.

Предназначение такого гаджета — возможность сделать селфи с высоты в несколько метров. При использовании селфи-палки, в кадр часто попадает только верх туловища и совсем немного красот на фоне. Селфи-дрон решает эту проблему. Он позволяет снять даже самую большую компанию в полный рост и так, чтобы все поместились в кадр. Более того, с ним можно легко снимать окружающие красоты. Девайс поднимается на несколько метров вверх и улетает на 40-50 метров вдаль.
Чтобы лучше понять особенности устройства, смотрите его плюсы и минусы в таблице:
Следует учесть, селфидроны в большинстве случаев управляются только с мобилки. Так что тем, кто привык к физическому джойстику будет сложно перестроиться.
Подытоживая вышеописанное, управлять квадрокоптером со смартфона сможет каждый! Главное, дать себе немного времени привыкнуть к новому стилю контроля.
Это продолжение повествования об автономном дроне. В первой части говорилось про hardware, в этой речь пойдет про software. Для начала небольшой ликбез про взаимодействие оператора с коптером. Вот типичная схема у большинства самосборных дронов:

А вот схема у продвинутых дронов:

Так работают игрушечные дроны, которые управляются со смартфона:

Управлять дроном через интернет можно так (при наличии сим-карты со статическим IP-адресом):

Или так, если IP-адрес динамический:

Для надежности и резервирования каналов связи последний вариант можно развить до такого состояния:

Далее я буду описывать процесс настройки полетного контроллера Emlid Navio 2 и микрокомпьютера Raspberry Pi 3.

Но, с небольшими модификациями, эти настройки подойдут для любого полетного контроллера, с которым можно общаться по протоколу MAVLink в связке с любым компьютером на ОС семейства Linux.

Важно! Настройку необходимо делать с отключенным питанием на регуляторах оборотов, чтобы случайно не запустились двигатели.
ПО для управления дроном на ПК и планшетах
Для управления БПЛА используются специальные программы GCS (Ground Control Station). Далее по тексту я буду использовать эту аббревиатуру. Мне по душе пришлась QGroundControl, мультиплатформенная (Windows, Linux, MacOS, iOS, Android) GCS с открытым исходным кодом, которая стала частью проекта DroneCode. Но есть и альтернативы, бесплатные и коммерческие: APM Planner, MissionPlanner, UgCS, LibrePilot, OpenPilot, Tower (DroidPlanner) для Android, MAVPilot (iOS), SidePilot (iOS). А также консольная MAVProxy.
Установка образа ОС на SD-карту
Итак, скачиваем готовый образ Raspbian Stretch с предустановленными Ardupilot и ROS от Emlid со страницы оригинальной инструкции. И пишем его на карту памяти с помощью Etcher или любой подобной программы.
Чтобы сразу после включения Raspberry соединялся с вашей WiFi сетью, необходимо отредактировать файл wpa_supplicant.conf в корне SD-карты. В нем должны быть такие строки:
Можно настроить и без WiFi, подключив одноплатник к роутеру Ethernet-кабелем. Теперь вынимаем SD-карту из ПК, вставляем ее в Raspberry и включаем питание. Через полминуты он должен появиться в админке роутера на странице подключенных устройств (хостнейм navio).
Обновление дистрибутива и установка необходимых пакетов
Открываем SSH-клиент и соединяемся с Raspberry (локальный IP-адрес navio вместо RASPBERRY_IP_ADDRESS):
Стандартный пароль: raspberry. В первую очередь необходимо расширить файловую систему ОС на весь объем SD-карты:
После перезагрузки, соединяемся еще раз и обновляем дистрибутив:
Устанавливаем дополнительные пакеты:
и компилируем обертку gst-rpicamsrc для gstreamer и родной камеры Raspicam:
Проверим работает ли камера (создается видеофайл test.h264):
Если gstreamer запустился, подождите пару секунд, чтобы записалось видео. Прервать процесс можно клавишами Ctrl+C. Если видео есть, значит камера работает.
Настройка и запуск Ardupilot
Релизы новых версий Ardupilot немного запаздывают в сборке от Emlid. Если необходимый функционал доступен в самой последней версии, то установить ее из исходников можно по этой инструкции.
Разработчики Navio добавили в свою сборку простую и удобную утилиту Emlid tool для проверки датчиков и настройки Ardupilot. Сначала проверим, видит ли Raspberry контроллер Navio:
Если в ответ на эту команду выдает что-то вроде:
значит видит. Проверим состояние датчиков (покажет список и состояние):
и драйвера ШИМ-контроллера в ядре Linux:
0 = не работает, 1 = работает.
Прошивка ШИМ-контроллера обновляется так:
Теперь настроим Ardupilot:
В терминале откроется текстовый GUI с пошаговыми менюшками. Выбираем copter последней версии, тип arducopter, автозапуск при включении (On boot: enable), старт после настройки (Ardupilot: start).

Выходим через пункт меню Quit.
Проверим запустился ли Ardupilot:
Обратите внимание, файл запуска в systemd называется arducopter, так как настроен был вариант copter.
Теперь нужно настроить Ardupilot так, чтобы он отправлял нам телеметрию. Для этого отредактируем файл конфигурации:
В нем должны быть такие строки:
Сохраняем файл (Ctrl+X, затем Y) и перезапускаем Ardupilot:
Проверить состояние процесса Ardupilot можно такой командой:
С такими настройками Ardupilot будет транслировать телеметрию (пакеты MAVLink) в локальный UDP-порт 14550. Далее, скрипт MAVProxy (описание ниже) будет забирать оттуда телеметрию и передавать в GCS или скрипт, а также отправлять в обратном направлении пакеты с командами.
Вместо локального адреса и порта можно записать IP-адрес ПК или планшета в локальной сети и пакеты будут транслироваться сразу туда.

Однако, такой подход оправдан, если данные телеметрии больше нигде не используются и у устройства с GCS статический IP адрес. Иначе каждый раз в настройках Ardupilot придется прописывать новый. Чтобы общаться с автопилотом по TCP могли одновременно несколько GCS с динамическими адресами и еще какие-нибудь скрипты на самом бортовом компьютере, удобнее использовать MAVProxy.

Этот скрипт (написан на Python) может получать пакеты MAVLink на локальный UDP-адрес и ретранслировать их на несколько локальных или удаленных IP-адресов как по UDP, так и по TCP. Пакеты передаются в обоих направлениях Ardupilot ⇔ GCS. Кроме того, MAVProxy представляет из себя полноценную GCS, но с текстовым интерфейсом.
MAVProxy
MAVProxy уже установлен в образе Navio. Его также можно установить и на ПК (Windows, Linux, MacOS) для дальнейшего общения с автопилотом в консольном режиме.
Убедившись, что Ardupilot работает, запустим на Raspberry скрипт MAVProxy такой командой:
Установка связи с дроном в локальной сети
Остановим скрипт (Ctrl+C) и снова запустим его в таком виде:
С дополнительным параметром --out=tcpin:0.0.0.0:5762 MAVProxy будет слушать порт 5762 на входящие TCP соединения от GCS. Как только GCS соединиться, пакеты с данными начнут перемещаться между дроном и GCS. Попробуем подключиться с ПК:



Калибровка датчиков и настройка параметров автопилота
Калибровку автопилота можно сделать почти в любой GCS. В документации Ardupilot она описана во всех подробностях. Прежде всего устанавливаем тип рамы. У меня стандартная 4-х моторная компоновка, поэтому это Quad X.

Первый полет лучше все же сделать в ручном режиме. Подключаем и калибруем радиоуправление (приемник и передатчик).

Осталось откалибровать акселерометр и компас.

Для того, чтобы Ardupilot видел и учитывал данные с внешних датчиков, установим необходимые параметры:
FLOW_ENABLE = 1 (Enabled)
FLOW_ADDR = 0 (0 = вариант для стандартного адреса 0х42)
Для лазерного высотомера VL53L0X (инструкция)
RNGFND_TYPE = 16 (VL53L0X)
RNGFND_ORIENT = 25 (ориентация дальномера вниз)
RNGFND_ADDR = 41 (I2C-адрес в десятичном виде). Адрес датчика по-умолчанию 0x29, что в десятичном виде = 41.
RNGFND_SCALING = 1
RNGFND_MIN_CM = 5
RNGFND_MAX_CM = 120
RNGFND_GNDCLEAR = 15 (расстояние от датчика до поверхности, когда дрон стоит на земле)
PLND_ENABLED = 1
PLND_TYPE = 2
PLND_BUS = 1
Для сонара переднего обзора (инструкция)
RNGFND2_TYPE = 2 (MaxbotixI2C sonar)
RNGFND2_ORIENT = 0 (ориентация дальномера вперед)
RNGFND2_MAX_CM = 700 (макс дальность в сантиметрах)
Теперь перезапускаем Ardupilot из меню GCS, снова соединяемся с бортом и открываем окошко MAVLink Inspector, чтобы увидеть данные с датчиков.

К сожалению, показания IR-Lock тут не видны, для анализа его работы придется взглянуть на бортовые логи. Как это сделать описано здесь.
Осталось настроить параметры безопасности и можно запускать дрон:

Как настроить гироподвес и управление основной камерой в деталях я напишу в одной из следующих статей, основные моменты изложены здесь.
Видеотрансляция
Проверим как работает видеотрансляция в сети WiFi. Такой командой можно запустить видео в TCP-порт на Raspberry с использованием родной утилиты raspivid для камеры Raspicam:
А вот такой командой делается тоже самое, только с использованием ранее скомпилированной обертки rpi-camsrc для gstreamer:
В обоих случаях, трансляция в формате h264 доступна по IP-адресу Raspberry на порту 5001.
Посмотреть ее можно запустив на своем ПК такую команду (должен быть установлен gstreamer), вместо RPI_ADDRESS указываем адрес Raspberry в сети:
В результате должно открыться окошко с видео.
Практически в любую GCS встроен видеоплеер, который может показывать RTSP-видеопоток. Чтобы сделать из Raspberry RTSP-сервер можно использовать консольный плеер VLC. Установка:
Видеотрансляция запускается так:
Видео доступно по адресу (вместо RPI_ADDRESS, адрес Raspberry):


Адрес потока можно использовать для подключения нескольких плееров на разных устройствах, но, так как видеозахват и трансляция для Raspberry весьма трудоемкий процесс, то для нескольких потребителей видео лучше использовать внешний сервер (описание ниже).
Телеметрия через интернет
Чтобы GCS могла подключиться через интернет к дрону с динамическим IP-адресом, необходим промежуточный сервер со статическим IP, на котором будет запущен скрипт MAVProxy. Для этих целей я воспользовался арендой облачного сервера у одного из известных провайдеров. Для MAVProxy подойдет самая минимальная конфигурация, но так как у меня этот же сервер будет заниматься ретрансляцией видео, то я выбрал вариант с чуть большей памятью (одно ядро и 1Гб памяти, Ubuntu 18.04). Для минимальной задержки в прохождении данных между бортом и GCS, сервер должен располагаться в максимальной географической близости к дрону и GCS.

Устанавливаем MAVProxy на сервер. Сначала зависимости:
а потом и сам скрипт через PIP:
и запустим скрипт с такими параметрами:
MAVProxy слушает порт 15001 на входящие пакеты телеметрии от дрона по протоколу UDP, а порт 15002 на входящее TCP-соединение от GCS.
Запустим MAVProxy на Raspberry еще с одним параметром, чтобы телеметрия транслировалась еще и на сервер (вместо SERVER_IP адрес своего сервера):
Подключим GCS на ПК или планшете к серверу. Настройки соединения такие же как и для локальной сети, только вместо IP-адреса Raspberry указываем адрес сервера и порт 15002.

Теперь можно подключить 4G USB-модем к Raspberry и оценить с какой задержкой реагирует авиагоризонт на экране.
Видео через интернет

Для ретрансляции видео установим на сервер VLC плеер:
После установки, запустим его как ретранслятор c UDP порта 5001 в RTSP канал SERVER_IP:8554/live:
На борту запустим видеотрансляцию с камеры на сервер по UDP (вместо SERVER_IP адрес сервера):
Адрес потока теперь можно использовать как источник видео в настройках GCS или открыть в любом плеере, поддерживающим этот протокол.
Теперь можно спланировать маршрут полета и запустить дрон через интернет, предварительно его включив, например, с помощью помощника по телефону.
Очевидно, что из-за относительно большого времени путешествия видео и телеметрии по сети, такой способ вряд ли подойдет для FPV-полетов в ручном режиме между препятствиями.

Всем привет. Сегодняшний обзор будет интересен для тех кто занимается рс тематикой. Так как я тоже люблю летать на дронах, решил найти девайс для просмотра картинки и ее одновременной записи. На борту каждого дрона используется fpv аналоговая камера с видео передатчиком на 5.8 ггц. Что бы удовлетворить свои хотелки, приобрел на тест fpv приемник для телефона или планшета — Eachine ROTG01 UVC.
Приехал в металлической коробочке. В комплекте специальный юсб кабель, антенна диполька и сам приемник.
В ходе теста выяснилось, что этот приемник не подходит для айфонов и некоторых моделей телефонов ос андроид. Прежде чем покупать, скачайте программу TestUVC_0.5.apk. Она вам точно подскажет, заведется ли этот приемник с вашим устройством.
Для работы нам потребуется правильно подключить кабель. Стрелки серого цвета должны показывать в сторону приемника (смотрите фото).
Далее устанавливаем приложение для записи видео и его просмотра. Я рекомендую (PoKeFPV), оно бесплатное!
Сначала подключаем приемник далее запускаем PoKeFPV и единственной кнопкой на приемнике начинаем поиск каналов. При долгом зажатии включается автопоиск.
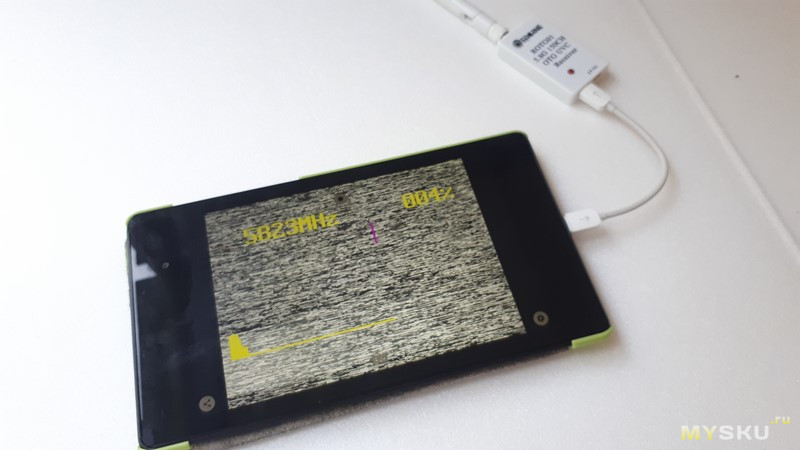

Синего экрана нет. Слева вверху отображается частота приема и справа в процентах мощность сигнала. Когда приемник просканирует все 150 каналов, на экране отображается каналы которые уже используются. Очень полезная функция.Например, когда летает несколько человек и таким способом можно найти оптимальные частоты что бы не мешать друг другу в полетах.
Запись ведется в формате avi, 640 на 480 пикселей и частотой кадров 25 в секунду. Качество записи можно оценить в моем обзоре.
Вывод
Плюсы
-Приемник хорошо подходит для новичков и тех кто не хочет много вкладывать в rc хобби.
— Низкая цена, нет синего экрана, запись фпв и использование в качестве черного ящика!
-Так же подойдет для просмотра вашим друзьям, когда вы используете более дорогие системы.
Минусы
— Не поддерживаются все телефоны!
Всем спасибо)
Читайте также: