
Для чего предназначена система воздушных сигналов свс или компьютер воздушных данных
Обновлено: 06.07.2024
Одним из важнейших параметров полета летательного аппарата (ЛА) является его скорость. В основу принципа действия современных бортовых средств измерения параметров движения летательного аппарата (ЛА) в воздушной среде положен аэрометрический метод. С развитием авиационной техники возросли требования к точности измерения аэрометрических параметров.
Скорость полета является векторной величиной, для определения которой необходимо знать модуль и направление. Направление вектора истинной воздушной скорости в системе координат, связанной с осями ЛА, определяется углами атаки и скольжения . Следовательно, для полного определения вектора воздушной скорости необходимо измерять модуль вектора и угла атаки и скольжения. В целях удобства пилотирования отдельно измеряют вертикальную скорость Vh, являющуюся вертикальной составляющей скорости полета ЛА, причем Vh=dh/dt. Приборы, предназначенные для измерения указанных выше скоростей, называются соответственно указателями истинной воздушной скорости, индикаторной скорости, числа М, а приборы, измеряющие вертикальную скорость, называются вариометрами.
2. СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ТИПА СВС-72
Система воздушных сигналов выпускается четырех модификаций: СВС1-72-1, СВС1-72-2, СВС11-72-3, СВС11-72-4, предназначенных для вычисления основных аэрометрических параметров полета самолета и выдачи данных о них потребителям.
Указанные модификации отличаются диапазоном решаемых параметров, количеством указателей и электрических выходов по каждому параметру. Рассмотрим данную систему с точки зрения измерения скорости и числа М.
2.1 Назначение системы.
Унифицированная система воздушных сигналов СВС-72 предназначена для вычисления и выдачи потребителям:
- aбсолютной барометрической высоты Ha;
- относительной барометрической высоты H;
-истинной воздушной скорости V;
- приборной скорости Vпр;
- статистического давления p;
- температуры наружного воздуха T.
Указанные параметры выдаются потребителям (в бортовую ЦВМ, контрольно-записывающую аппаратуру, самолетный ответчик и др.) в виде: напряжения с синусно-косинусного трансформатора СКВТ (H,V,M); относительного сопротивления r (Ha, H , V , M, Vпр, p,T ).
Под относительным сопротивлением понимается отношение сопротивления токосъемного участка потенциометра, с которого снимается сигнал, к его полному сопротивлению.
Параметры H,V,M,T кроме того индицируются.
В состав системы СВС11-72-3 входят:
- блок воздушных параметров БВП-7;
- комбинированный указатель числа М и скорости УМС-2,5;
- указатель высоты УВ-30-3;
- приемник температуры заторможенного воздуха П-69-2М
( в комплект не входит ).
Системы СВС-72 могут совместно работать с указателями температуры типа УТ-1М и указателями-повторителями высоты и скорости УВ-П и УС-П. Указатели УВ-П и УС-П поставляются только в комплекте СВС1-72-1. При этом для их работы используется по одному потенциометрическому выходу V и H.
При наличии в комплекте СВС-72 указателя температуры на самолете устанавливаются два приемника П-69-2М или одинП-69-4
2.2 Принцип построения СВС11-72-3
Вычисление параметров полета во всех СВС выполняется по единым градуировочным формулам аэрометрических приборов.
Число М определяется, как функция отношения динамического pд и статического p давлений ( pд- полное давление заторможенного потока воздуха ):
Для вычисления истинной воздушной скорости используется соотношение
Где а- скорость звука на высоте полета;
k- показатель адиабаты (k=1,4 );
Приборная скорость Vпр есть условная величина , получаемая пересчетом динамического давления рд в величину скорости при стандартной плотности воздуха рс и температуре . Формулы пересчета имеют вид
a==340.224 м/с- стандартная скорость звука .
Приведенные градуировочные формулы решаются в СВС11-72-3 электромеханическими счетно-решающими устройствами, которые состоят из индукционных систем ( решение Vпр ) и самобалансирующихся электрических мостов ( решение числа М ).
Решение выходных параметров производится на типовых мостовых схемах:
-потенциометрической мостовой схеме деления- числа М;
-реостатной мостовой схеме умножения- V.
В мостовых схемах применены потенциометры прецизионные многооборотные линейные и функциональные типа ППМЛ или ППМФ-М. Исключение составляет потенциометр, с которого снимается сигнал, пропорциональный числу М (СВС1-72-1) , однооборотный со средней точкой (ПТП).
2.3 Принципиальная схема устройствСВС-11-72
На рисунке 1 представлена принципиальная электрокинематическая
схема датчика статического давления. Рассмотрим ее работу. При изменении высоты полета статическое давление p воспринимается чувствительным элементом- блоком анероидных коробок АЧЭ. В результате изменения p происходит механическое перемещение верхнего центра блока. Оно через биметаллическую скобу 1 и тяги 5 преобразуется во вращательное движение якоря Ш-образного индукционного датчика ИД1 ( ось вращения ) и приводит к нарушению равенства зазоров и между якорем и сердечником магнитопровода. Вследствие этого возникает неравенство магнитных сопротивлений правой и левой части магнитопровода. Так как вторичные обмотки ИД, расположенные на крайних стержнях, включены встречно, на выходе индукционного датчика появляется напряжение, равное разности ЭДС, наводимых во вторичных обмотках. Обмотка возбуждения расположена на среднем стержне. Сигнал ИД через согласующую плату Пл1 подается на вход усилителя У1 в сумме с сигналом тахогенератора Г1, снимаемого с резистора R3 выхода У1 через блок согласования БС1, и поступает на управляющую обмотку двигателя М1 ( ДГ-0.5ТА ), который через понижающую передачу ПП1, корректор, червячную пару и кулачок К4 поворачивает качалку с укрепленным на ней статором ИД до восстановления равенства зазоров и . Одновременно с приведением системы в равновесное состояние перемещаются щетки выходных потенциометров. Выходной сигнал r(p) выдается с функционального потенциометра П2, входящего в мостовую схему решения числа М. В равновесном состоянии следящей системы (= ) функциональными потенциометрами П3-П5 выдаются сигналы r(На). Потенциометр П3 входит в схему моста решения H, потенциометры П4 и П5 выдают сигналы r(На) потребителям.
3 4 5 6 7 8 9 10 11

Рис.1. Принципиальная элетрокинематическая схема датчика статического давления
Применение кулачка К 4 обусловлено тем, что используемые многооборотные функциональные потенциометры типа ППМФ-М не позволяют реализовывать функцию На=f(p) вследствие значительной крутизны ее характеристики. Резисторы R7-R14 являются масштабными. Лекальный корректор используется при заводской юстировке датчика. Температурная погрешность чувствительного элемента АЧЭ компенсируется биметаллической скобой 1, один конец которой шарнирно связан с подвижным центром АЧЭ, другой- с тягой 5.
При изменении температуры окружающей среды биметаллическая скоба, разгибаясь, переместит точку крепления тяги 5 со скобой 1, осуществляя тем самым компенсацию 1-го рода. При изменении величины статического давления верхний центр АЧЭ, перемещаясь, повернет биметаллическую скобу вокруг точки , в результате чего смещение от температурного прогиба скобы изменится, осуществляя температурную компенсацию 2-го рода. Поворот биметаллической скобы вокруг точки при движении верхнего центра АЧЭ происходит благодаря применению планки 2, которая жестко скреплена с одним концом скобы, а пружиной 3 прижата к регулировочному винту 4, и при изменении давления меняется угол наклона скобы к осевой линии АЧЭ. Защита АЧЭ от перегрузки при резком изменении высоты, когда якорь ИД из-за запаздывания отработки может повернуться до упора, обеспечивается поворотом качалки 6 относительно оси 9 ( эта ось прижимается к качалке 8 пластинчатой пружиной, не показанной на рисунке ).
Винтом 10 регулируется начальное положение ИД1. При его вращении изменяется положение качалки 8 относительно планки 11 и ось 9 качалки 6 смещается вдоль планки 11, вызывая поворот якоря ИД1, который отрабатывается следящей системой датчика. Пружина 7 выбирает свободные ходы качалок 6 и 8. Разовый сигнал при =2000200 м формируется микро выключателем МВ3 и его кулачком К3. Профилировка кулачка К5 и потенциометров П9, П10 выдачи сигналов r(Vпр) потребителям осуществляется в соответствии с формулами (4) и (5). С функционального потенциометра П8 выдается сигнал (р) в мос числа М . Встроенный контроль работоспособности датчика p(pд) осуществляется подключением контактами реле Р1 ко входу усилителя У1 (У2) вместо ИД1 (ИД2) мостовой схемы формирования эталонного сигнала Pэт (Pдэт),состоящей из тарировочных резисторов R5, R6 (R19-R20) и функционального потенциометра П1
(П7), закон профилировки которого одинаков с законом профилировки кулачка К4 (К5). Реле Р1 срабатывает при нажатии кнопки Кн1 КОНТРОЛЬ на БВП-7 или при подаче сигнала КОНТРОЛЬ СВС напряжением +27В на диод VD4. Если вычисленные контрольные значения Наэт и Vпрэт находятся в пределах допусков ( погрешности не превышают более чем в 1.5 раза допустимые погрешности измерения параметров при t= +25 C ), кулачки К1 и К2 замыкают микро выключатели МВ1 и МВ2 соответственно. При этом на лампы сигнализации Л1 и Л2 подается напряжение +27 В. Для проверки исправности ламп служит кнопка Кн2 КОНТРОЛЬ ЛАМП. Сигнал исправности СВС по электропитанию выдается в виде напряжения +27 В через контакты реле Р2, обмотка которого подключена к трансформатору Тр1 питания СВС напряжением переменного тока 115 В частотой 400 Гц ( на схеме не указан ). Переменное напряжение выпрямляется диодом VD1. Конденсатор C3 служит для сглаживания пульсаций выпрямленного напряжения. Сигнал исправности СВС по электропитанию снимается при отсутствии любого из напряжений ( +27 или 115 В, f=400 Гц ). Встроенный контроль работоспособности датчиков не охватывает чувствительных элементов индукционных датчиков корректоров, кулачков и осуществляется лишь в одной точке диапазона измеряемых давлений. Конструктивно каждый датчик выполнен в отдельном легкосъемном корпусе, в котором смонтированы все элементы датчика, за исключением усилителя.
Усилитель типа УСС-2 включает предварительный усилитель напряжения на микросхеме УТ401А и транзисторе 2Т312Б и представляет собой двухканальный трехкаскадный усилитель мощности. Для увеличения коэффициента усиления используется положительная обратная связь по переменному току. На плате Пл смонтированы согласующие входные резисторы в блоке согласования- элементы делителя напряжения цепи положительной обратной связи усилителя, конденсаторов развязки цепи нагрузки по постоянному току, согласующий RC-фильтр и фазосдвигающий конденсатор цепи обмотки возбуждения двигателя. Три трансформатора с двумя блоками выпрямителей, размещенные в блоке БВП-7, обеспечивают развязку по цепям питания постоянным и переменным током элементов вычислительной схемы системы.
Указатель числа М и скорости УМС-2.5, принципиальная электро-кинематическая схема которого представлена на рисунке 2, включает большинство элементов двух самостоятельных каналов - решения и выдачи числа М и истинной - воздушной скорости V. На схеме указаны также элементы других блоков, которые необходимы для пояснения принципа работы мостов числа М и V.
Мост числа М составляет функциональный потенциометр П1-7 обратной связи следящей системы и функциональные выходные потенциометры П2, П3 датчиков p и соответственно.
В схеме предусмотрено изменение коэффициента скоростной обратной связи в зависимости от значения числа М механизмом переключения МП1-1. Согласование масштабов обеспечивается резисторами R1-23, R1-25 в цепи потенциометра П1-7.
Для решения V используется реостатный мост умножения переменного тока. Три плеча моста составляют постоянный резистор R1-5, функциональный потенциометр П1-1 обратной связи следящей системы и потенциометр П1-8, который профилируется в соответствии с функцией (M).
На рисунке 3 показана Принципиальная электрокинематическая схема указателя УМС-2.5.

Рис.2 Внешний вид СВС 72

Рис.3. Принципиальная электрокинематическая схема указателя УМС-2.5
2.4 Основные технические характеристики СВС11-72-3
Основные технические параметры Системы воздушных сигналов представлены в таблице 1.
Недостаточная точность большинства аэрометрических пилотажно-навигационных приборов, а также отсутствие электрических выходов по измеряемым параметрам, необходимых многим потребителям, явились основной причиной разработки единых систем определения и выдачи потребителям основных аэрометрических параметров. Эти системы на первом этапе развития получила название централей скорости в высоты (ЦСВ), а в дальнейшем - систем воздушных сигналов (СВС).
В основу построения ЦСВ и СВС положено наличие взаимосвязей градуировочных формул вычисляемых параметров.
Системы воздушных сигналов представляют собой централизованные устройства для вычисления и выдачи потребителям следующих аэрометрических параметров:
- истинной воздушной скорости V;
- приборной скорости Vпр;
- относительной H и абсолютной Ha барометрических высот;
- температуры наружного воздуха T;
Для вычисления всех этих параметров достаточно знать три входные величины: динамическое Рд, статическое Р давления и температуру Т. Давления Рд и Р измеряются с помощью ПВД, а температура - с помощью приемников температуры типа П-69 с камерой торможения. Так как на движущемся летательном аппарате температура Т непосредственно не может быть измерена по причине аэродинамического нагрева приемника, измеряется так называемая температура полного торможения Тт воздушного потока. Температура Т вычисляется по известной из аэродинамики формуле
где М получено из соотношений:
В общем виде выражения (6.14) (6.15) можно представить как
Вычисление истинной воздушной скорости V производится по формуле
Для получения приборной скорости Vпр используется зависимость между V и Vпр.
Абсолютная барометрическая высота Ha вычисляется по точным гипсометрическим формулам относительно уровня с давлением Ро= 760 мм.рт.ст. Относительная высота Н определяется как разность
где. Нз - абсолютная высота уровня начала отсчета Н.
На современных летательных аппаратах находят применение как ЦСВ, так и СВС. Вычисление выходных параметров в электромеханических ЦСВ производится с помощью самоуравновешивающихся мостов переменного тока, которые выполняют главным образом операцию умножения (деления).
Работу СВС рассмотрим по схеме (рис. 6.10). Статическое Р и полное Рп давления от системы ПВД, а температура Тт от приемника температуры торможения поступают в вычислитель скорости, числа М и высоты полета ВСМВ. Вычисленные значения параметров выдаются в виде напряжений на указатели скорости УСО и высоты УВО, а также через блок имитации нагрузок БИН - к другим потребителям этих параметров.

Блок имитации нагрузок предназначен для автоматического подключения эквивалентных нагрузок (резисторов) к соответствующему выходу ВСМВ при отключении какого-либо потребителя и обеспечения, таким образом, необходимой точности СВС.
Отображение информации о высотах полета, абсолютной На или относительной Н и заданной Нзр осуществляется указателем высоты с помощью внутренней и внешней шкал, малой 1 а большой 2 стрелок, а также двухразрядного счетчика. По внутренней шкале и стрелке 1, а также до счетчику отсчитывается высота в километрах, а по наружной шкале и стрелке 2 - в метрах.
Заданная высота Нзр устанавливается автоматически по сигналам наземной системы радионаведения и отсчитывается по внутренней шкале и командному индексу 5. Заданное давление Рз устанавливается по счетчику давления 7 с помощью кремальеры 6. С кремальерой связана щетка потенциометра, выдающего в.вычислитель сигналы Нз = f(Pз) для вычисления по формуле относительной высоты Н полета.
Указатель скорости УСО выдает информацию о значениях истинной воздушной скорости V, текущего и заданного чисел М полета. Скорость V отсчитывается но узкой стрелке 12, а число М - по широкой - 11. С помощью командного индекса 13, устанавливаемого по сигналам системы радионаведения, отсчитывается заданное значение Мзр. Для расширения предела измерения указателя на дополнительный диапазон от 3 до 3,5 при V > 1500 км/ч в окнах бленкеров 9 вместо чисел 0 и 0,5 появляются числа 3 и 3,5.
В системах воздушных сигналов предусмотрен встроенный контроль их работоспособности путем подключения на вход вычислителя тестовых (эталонных) сигналов. При нажатии кнопки контроля на приборной доске датчики давлений Рд, Р, температура Тт отключаются, а в вычислительную схему подаются эталонные сигналы, при которых выходные значения вычисленных СВС параметров по указателям УВО и УСО должны с требуемой точностью соответствовать их контрольным значениям.
Вывод: система СВС позволила изменить качество восприятия информации и её использования как экипажем так использование данной информации в различных системах на ЛА. СВС позволила так же уменьшить общий вес оборудования используемый для отображения информации и доведение её до потребителей.
Заключение
Автоматизация и комплексирование всех видов оборудования летательных аппаратов привели к тесной взаимосвязи авиационного оборудования с системами самолета и двигателей, радиоэлектронного оборудования и авиационного вооружения.
Взаимодействие авиационного оборудования, радиоэлектронного оборудования, авиационного вооружения в единых пилотажнонавигационных и прицельно-навигационных комплексах, объединяющих автоматические системы навигации и управления полетом, системы управления вооружением, позволяет с максимальной эффективностью решать задачи боевого применения самолетов.
Наиболее тесные взаимосвязи в комплексе имеют системы авиационного и радиоэлектронного оборудования при решении таких функциональных задач, как определение пилотажных и навигационных параметров полета самолета, огибание рельефа, директорное и автоматическое наведение и др.
В решении всех этих задач принимает непосредственное участие система ПВД и СВС.
Вопросы для самоконтроля
1. Назначение системы ПВД, конструкция и особенность решения подвода статического и динамического давления до потребителей?
2. Как обеспечивается измерение высоты полёта на ЛА?
3. Как обеспечивается измерение приборной и истинной скорости полёта ЛА?
4. Как обеспечивается измерение вертикальной скорости набора высоты и снижения?
5. Какие параметры необходимо измерять для обеспечения безопасности полёта в герметичной кабине ЛА?
6. Для чего и из каких соображений была сконструирована СВС и как она используется?
Литература
1. Е. А.Румянцев «Авиационное оборудование». Типография ВВИА имени проф. Н. Е. Чуковского 1980 г. стр. 74-95.
Одними из важнейших параметров полета летательного аппарата (ЛА) является его скорость и высота. В основу принципа действия современных бортовых средств измерения параметров движения летательного аппарата (ЛА) в воздушной среде положен аэрометрический метод.
Аэрометрический метод определения движения основан на измерениях определенных аэрометрических величин, построении уравнений связи определяемых параметров и измеряемых величин и их решении. В соответствии с этим определяется и понятие навигационно-пилотажных систем воздушных сигналов (СВС). Первичными измеряемыми величинами являются: статическое давление атмосферы , динамическое давление набегающего потока воздуха (скоростного напора)и температура заторможенного потока воздуха. Навигационно-пилотажные системы воздушных сигналов – устройства, предназначенные для определения параметров движения ЛА (самолетов, вертолетов) по отношению к воздушной среде, т.е. барометрической высоты, скорости полета, числаМ и отклонений от заданных значений этих параметров, а также температуры наружного воздуха и относительной плотности воздух.
С развитием авиационной техники возросли требования к точности измерения аэрометрических параметров. Информация о величинах аэрометрических параметров используется на современных ЛА не только для визуального отображения на приборной доске летчика. Она поступает и в различные системы ЛА в виде электрических сигналов. Для этого используются различные устройства (датчики воздушной скорости, датчики высоты и др.). Число таких устройств на ЛА значительно. Кроме того, велико число каналов связи с потребителями. Чтобы уменьшить массу комплекса, необходимо добиваться минимальных габаритов отдельных приборов, что обычно противоречит требованиям повышения точности. Система воздушных сигналов современных военных и гражданских самолётов представляет собой программно-аппаратную систему, предназначенную для измерения, вычисления и выдачи на индикацию экипажу самолёта и в бортовые автоматические системы информации о высотно-скоростных параметрах, таких как высота, вертикальная, истинная воздушная и приборная скорости, число Маха, а также таких параметров, как температура воздуха, углы атаки и скольжения. Современные цифровые СВС представляют собой набор датчиков и устройств, управляемых микропроцессором, работающим по заданной программе.
Применение в них специализированных цифровых вычислителей и прецизионных первичных измерительных преобразователей воздушных давлений позволило существенно повысить точность измерения аэрометрических параметров полета и расширить функциональные возможности СВС. Важные достоинства цифровых вычислителей – стабильность характеристик, исключающая необходимость эксплуатационных регулировок, и удобство согласования их выходных сигналов со входами БЦВМ. Цифровые СВС отвечают современному направлению развития бортовых измерительных систем, связанному с широким внедрением в них цифровой вычислительной техники. От точности и надежности СВС зависят эффективность применения ЛА и безопасность полетов. Таким образом, системы воздушных сигналов занимают важное место в составе бортового оборудования современных ЛА.
Аэрометрический метод определения высотно-скоростных параметров ЛА основан на их зависимости от трех измеряемых параметров: статического давления атмосферы , динамического давления набегающего потока воздуха (скоростного напора)и температура заторможенного потока воздуха.
Скорость полета ЛА измеряют относительно воздушного потока и поверхности Земли. Различают истинную воздушную скорость – скорость полета ЛА относительно воздуха, индикаторную (приборную) скорость в предположении, что плотность воздуха одинакова на всех высотах, и путевую скорость – скорость полета ЛА относительно Земли. Безразмерной характеристикой скорости полета самолета является число , где– истинная скорость,– скорость звука в воздухе,– ускорение свободного падения,м/град – газовая постоянная,– абсолютная температура наружного воздуха на высотеH в К, – показатель адиабаты для воздуха.
Треугольник, образованный горизонтальными компонентами векторов скоростей воздушной и ветра и вектором путевой скорости, называют навигационным треугольником скоростей. Как видно из рис. 12.1, путевая скорость равна геометрической сумме горизонтальных составляющих истинной воздушной скорости и скорости ветра :

. (12.1)

Рис.12.1. Навигационный треугольник скоростей
Его элементами являются: воздушная скорость , скорость ветра, путевая скорость, направление ветра, курс К, угол сноса УС, путевой угол ПУ, угол ветра УВ, курсовой угол ветра КУВ. На указанном рисунке стрелками показаны положительные направления отсчета углов.
Скорость полета является векторной величиной, для определения которой необходимо знать модуль и направление. Направление вектора истинной воздушной скорости в системе координат, связанной с осями ЛА, определяется углами атаки и скольжения. Следовательно, для полного определения вектора воздушной скорости необходимо измерять модуль вектора скорости и углы атаки и скольжения.
В целях удобства пилотирования отдельно измеряют вертикальную скорость Vh, являющуюся вертикальной составляющей скорости полета ЛА. Вертикальную скорость можно определить двумя способами: с помощью вариометра и дифференцированием измеряемой мгновенной высоты полета. В настоящее время ввиду широкого применения микропроцессорной техники легко реализуем второй способ, что ведет к уменьшению погрешности измерения Vh.

. (12.2)
Уравнение связи для определения числа М при дозвуковой скорости полета

, (12.3)
и при сверхзвуковой скорости полета

, (12.4)
где ,– в Па. При значенииформулы (12.3) и (12.4) соответственно принимают вид

; (12.5)

. (12.6)
Уравнение связи для определения истинной воздушной скорости:

, (12.7)

, (12.8)
где ,– коэффициент торможения воздуха, значение которого в зависимости от конструктивных особенностей приемника и места его установки колеблется в пределах 0,98…1,02.

Уравнение связи для определения температуры наружного воздуха на высоте :

. (12.9)
Уравнение связи для определения барометрической высоты в соответствии с формулой Лапласа

. (12.10)

Величина средней температуры столба воздуха зависит от высоты и на средних широтах определяется зависимостями
для м, (12.11)
для м, (12.12)
где и– давление в Па и абсолютная температура воздуха в К у поверхности Земли,– температура воздуха на высоте 11000 м.
В уравнения связи (12.3)…(12.12) входят три переменные величины ,,. В результате измерения эти величины становятся известными функциями времени и в этом случае уравнения связи можно считать уравнениями функционирования СВС.
На летательных аппаратах, где имеется большое количество барометрических и манометрических приборов, получающих питание от системы приема воздушных давлений, появляется динамическая погрешность приборов. Причина ее появления заключается в том, что полости трубопроводов корпусов и манометрических коробок приборов получаются настолько большими, что заметными становятся запаздывания показаний приборов или выдачи ими управляющих сигналов при изменении высоты или скорости полета. Для уменьшения указанных погрешностей на летательных аппаратах устанавливают несколько систем ПВД, каждая из которых обеспечивает работу отдельной группы приборов.
Реализация всех выше указанных алгоритмов вычисления высотно-скоростных параметров может быть проведена с помощью систем воздушных сигналов различного типа, таких как электромеханических СВС-72, либо с помощью цифровых систем воздушных сигналов, построенных на базе микропроцессорной системы (СВС-85, СВС-2Ц-У, СВС-В1, СВС-96 и др.).

Аэрометрия – своеобразная точка опоры в небе. От точности и надежности работы измерительных систем на борту зависит безопасность любого полета. В нашей стране одним из лидеров в области разработки аэрометрической авионики является «Аэроприбор-Восход» (входит в КРЭТ). На протяжении семидесяти шести лет предприятием создано более 550 наименований аэрометрических изделий практически для всех отечественных самолетов и вертолетов, а также для ракетно-космической техники и парашютной автоматики. К примеру, датчики давления в скафандрах Юрия Гагарина и Алексея Леонова тоже сделаны специалистами «Аэроприбор-Восхода».
Сегодня здесь наряду с созданием приборов, работающих на традиционных принципах, проводятся исследования по разработке альтернативных принципов измерения воздушно-скоростных параметров. Например, изучается лазерный метод определения скорости воздушного потока.
Недавно АО «Аэроприбор-Восход» отметил свое 76-летие – предприятие было основано 14 июля 1944 года как опытно-конструкторское бюро при заводе №133 (ОКБ-133). Новое КБ должно было заняться, в частности, разработкой анероидно-мембранных приборов. Затем началась разработка главных пилотажных приборов, таких как указатель скорости, высотомер и вариометр, который показывает, как быстро самолет набирает высоту или снижается. Предприятие активно развивало данное направление и после окончания войны наладило серийный выпуск новых пилотажно-навигационных приборов. Некоторые из них до сих пор успешно эксплуатируются на самолетах.
Но развитие авиатехники всегда требует создания передовых, более точных аэрометрических приборов и систем. К примеру, когда в конце 1950-х годов в стране активно развивалась ракетно-космическая техника, специалистами предприятия были разработаны системы для обеспечения приземления первого космонавта Юрия Гагарина. И в последующие годы предприятие не забыло про космос – участвовало в создании «Бурана», здесь же были разработаны приборы, без которых невозможна была бы посадка космических кораблей «Союз».
В 1960-х в инициативном порядке специалисты предприятия начали работы по созданию принципиально нового устройства для отображения пилотажно-навигационной информации – коллиматорного индикатора. Сегодня такие индикаторы на лобовом стекле (ИЛС) можно встретить на всех современных летательных аппаратах. В 1980-е годы в стенах предприятия была разработана первая отечественная цифровая система воздушных сигналов СВС‐2Ц‐1.
Всего за годы существования в АО «Аэроприбор-Восход» были созданы более полутысячи наименований изделий измерения высотно-скоростных параметров. Приборы произведенные предприятием внедрены практически во все отечественные летательные аппараты, в том числе и новейшие – авиалайнере МС -21, истребителях Су-57, Су-35 и МиГ-35, тяжелом транспортнике Ил-76МД-90А, на боевом вертолете Ка-52 и многоцелевом Ка-62.
«Аэроприбор-Восход» продолжает развиваться, а в стенах предприятия рождаются новые передовые для своего времени технические решения. Некоторые новейшие разработки – в нашей подборке.
Система СИВПВ-М: многогранная по форме и характеру
Не секрет, что одно из главных направлений деятельности АО «Аэроприбор-Восход» – создание аэрометрической аппаратуры для вертолетной техники. Приборы предприятия устанавливаются на всех современных российских вертолетах. Так, для ударных Ка-52 создана и серийно выпускается всеракурсная система измерения воздушных параметров вертолета СИВПВ-52. Для новейшего многоцелевого Ка-62 предприятием разработана система управления общевертолетным оборудованием (СУОВО).
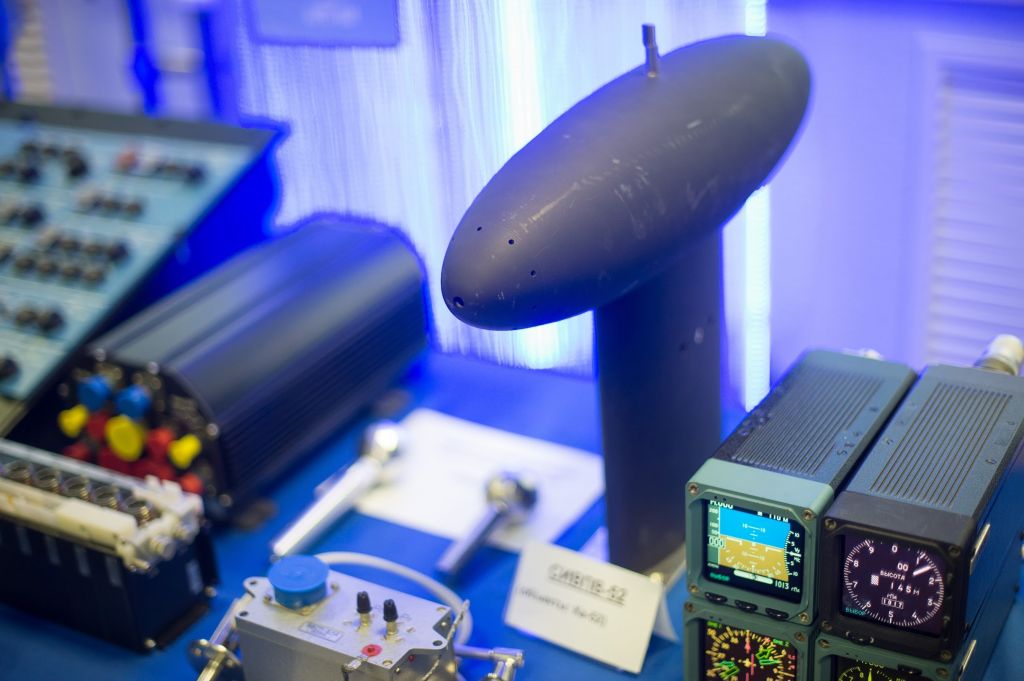
Одной из последних разработок АО «Аэроприбор-Восход» совместно с ФГУП «ЦАГИ» является система воздушных параметров вертолета СИВПВ-М, построенная на базе ППВД М – приемника преобразователя воздушных данных, входящего в данную систему. Указанная система измеряет скорость движения вертолета в любых режимах и при любом направлении движения.
Новинка отличается от обычных приемников воздушного давления даже внешне – ППВД М представляет собой сферический многогранник, установленный на штанге. Разработчики особо отмечают тот факт, что такая геометрия приемников воздушных давлений является уникальной – ничего подобного в мире никто еще не предлагал.
К достоинствам данной системы также можно отнести малое количество элементов, выступающих в воздушный поток. Это снижает требования к местам размещения модулей системы на вертолете, делает возможным установку на любых типах современных вертолетов. Два таких многогранника могут быть размещены на левом и правом бортах носовой части фюзеляжа вертолета.
Среди других основных отличий новинки – компактные габариты и небольшая масса. Сам моноблок ППВД-М со всеми датчиками и системой обогрева весит не более 1,5 кг, а масса всей системы с двумя приемниками не превышает 8 кг.
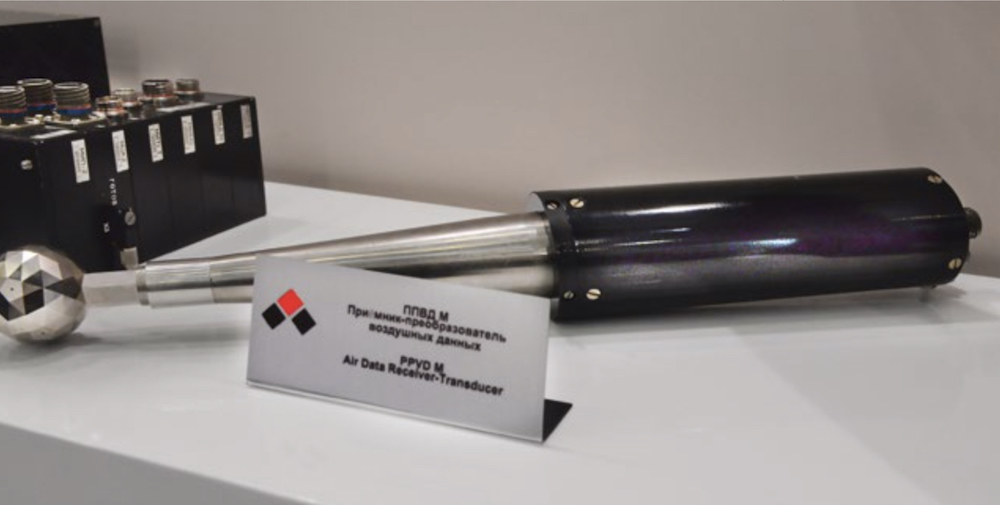
Преимущества нового приемника-преобразователя воздушных данных ограничиваются не только конструкцией – отмечают и его технические характеристики. Сферический ППВДМ имеет 192 грани, приемники давления расположены в 12 из них. Обработка измерений такого ПВД позволяет фиксировать движение на сверхмалых скоростях, точно определять углы атаки и скольжения летательного аппарата. Необходимо подчеркнуть, что это особенно актуально для вертолетов, на которых разработчики всегда сталкиваются с проблемой влияния вихревой колонны воздуха, генерируемой лопастями несущего винта, на восприятие воздушных давлений приемниками воздушных давлений.
Система предназначена для измерения абсолютной барометрической высоты в диапазоне от -500 до 8000 м, приборной и истинной воздушной скорости от 0 до 500 км/ч, а также температуры окружающего воздуха от –60°С до +80°С, углов атаки и скольжения и других параметров. При этом скорость определяется с погрешностью не более 5 км/ч, а погрешность измерения углов атаки и скольжения составляет не более 1–2 градусов.
СИВСП-БЛА: миниатюрные датчики для беспилотников
Среди других новых разработок «Аэроприбор-Восход» необходимо отметить систему измерения высотно-скоростных параметров для беспилотных летательных аппаратов СИВСП-БЛА.
Восприняв воздушные давления и температуру торможения, система преобразует их в цифровой вид. Затем на основе этого производится вычисление высотно-скоростных параметров и данные выдаются по кодовым линиям связи оператору. СИВСП-БЛА способна определять воздушные параметры движения современных беспилотников круглосуточно, в любое время года, при любых географических условиях.

Аэрометрическая аппаратура для беспилотных летательных аппаратов не подразумевает передачу информации на средства отображения для пилотов, но в этом случае существует другой важный момент – особые требования к аппаратуре по массе, габаритам и энергопотреблению. Уникальная особенность новой СИВСП-БЛА – применение миниатюрных приемников полного и статического давлений.
СИВСП-БЛА подходит как для военных, так и гражданских беспилотников длительной продолжительности полета. По своим характеристикам прибор не уступает известным иностранным аналогам. Считается, что данная разработка является важным шагом в сторону формирования в нашей стране полноценного комплекса компетенций в сфере производства современных БПЛА. Также предприятие разрабатывает системы для БПЛА среднего и тяжелого классов. Отметим, что сегодня во многих российских средних и тяжелых беспилотных системах применяются разработки КРЭТ. В частности, Концерном создан интегрированный комплекс БРЭО для беспилотников. Помимо СИВСП-БЛА в него входят информационно-управляющие системы, системы автоматического управления, инерциально-спутниковая навигационная система, а также системы контроля и диагностики бортового оборудования.
Портативная метеостанция СМП-1: точный прогноз для армии
Разработку специализированной метеостанции «Аэроприбор-Восход» начал в инициативном порядке. Впервые портативная метеостанция СМП-1 двойного назначения была представлена на Международном военно-техническом форуме «Армия-2019».

СМП-1 определяет основные параметры окружающей среды – давление, температуру, влажность, скорость и направление ветра – с минимальной погрешностью. Кроме того, прибор оснащен встроенными приемопередатчиками космических навигационных систем ГЛОНАСС и GPS. Таким образом устройство можно использовать и в качестве носимого навигатора. С картой местности удобно работать благодаря сенсорному дисплею. Устройство компактно и весит всего 600 грамм.
СМП-1 не имеет аналогов на отечественном рынке. Портативная метеостанция может быть востребована силовыми структурами, в том числе МЧС, например, для определения скорости распространения пожара или при экстренной посадке самолета при отсутствии взлетно-посадочной полосы. В армии прибор может найти свое применение для корректировки направления выстрела из стрелкового или артиллерийского вооружения.
Система воздушных сигналов СВС-Л: лазерный измеритель скорости в действии
В прошлом году на авиасалоне МАКС предприятие впервые представило еще одну свою новинку – систему воздушных сигналов с лазерным измерителем воздушной скорости СВС-Л. Из названия уже понятно, что вместо классического приемника полного давления здесь используется лазерный измеритель скорости.
Система воздушных сигналов (СВС) современных летательных аппаратов представляет собой программно-аппаратную систему, которая измеряет, вычисляет и выдает на индикаторы пилотов информацию о температуре воздуха, скорости и высоте полета.
![wBES_6561.jpg]()
Фото: «НИИТеплоприбор»

Новинка, разработанная АО «Аэроприбор-Восход» совместно с «НИИТеплоприбор», позволяет определять скорости ниже 50 км/ч. При этом СВС-Л потребляет меньше мощности для обогрева лазерного излучателя, чем приемник полного давления. Основным преимуществом системы является отсутствие выступающих в поток частей. За счет этого по сравнению со стандартной СВС, вероятность обледенения системы во время полета гораздо меньше. Возможное обледенение на больших высотах зачастую является причиной ошибки в измерении воздушной скорости.
Планируется, что измеритель позволит значительно снизить радиолокационную заметность летательных аппаратов. Ожидается, что СВС-Л найдет применение на многих современных отечественных самолетах и вертолетах.
Читайте также: