
Размер пикселя на местности как найти
Обновлено: 06.07.2024
А.Ю. Сечин (Фирма «Ракурс»)
В настоящее время фотограмметрическая обработка снимков проводится на цифровых фотограмметрических станциях (ЦФС). Одним из необходимых этапов является сканирование пленки, что часто приводит к снижению точности и качества информации. Сохранить качество можно, если использовать данные, полученные с цифровых фотограмметрических камер, которые все чаще находят применение в фотограмметрическом производстве. Многие организации и частные компании стали владельцами таких камер. Не ставя целью проведение сравнительного анализа различных моделей камер, обратим внимание читателей на некоторые их характеристики и особенности использования. В статье рассматриваются те камеры, с данными которых автору приходилось работать. Ничем иным выбор исследуемых образцов не обусловлен.
В качестве «эталона» при рассмотрении современных цифровых камер будем использовать широко распространенную аналоговую камеру Leica RC-30 (Leica Geosystems, Швейцария). Камера RC-30 может быть использована с объективами, имеющими фокусное расстояние 150 или 300 мм; размер ее кадра составляет 230x230 мм, что при сканировании с типичным разрешением 15 мкм дает цифровое изображение размером 15 000x15 000 пикселей.
Технология производства цифровых светочувствительных матриц (CMOS или CCD) пока не позволяет выпускать такие габаритные матрицы. Поэтому при изготовлении цифровых аэросъемочных камер используют матрицы небольших размеров (среднеформатные камеры) или специальные приемы по объединению кадров, полученных разными матрицами (крупноформатные камеры). Следует отметить, что производители лидирующих крупноформатных камер — UltraСam D, UltraСam X (Microsoft Corp., США) и DMC (Intergraph Z/I Imaging, США) — используют разные подходы для «составления» цифрового изображения большого размера. В камерах UltraCam исходные снимки получают разными объективами, но съемка синхронизируется таким образом, что центры проекций этих снимков (положение объективов) совпадают. Четыре снимка, из которых «сшивается» изображение в камере DMC, имеют небольшое перекрытие и формируются в один момент времени (синхронизация с точностью 0,01 мс), но центры проекций у них разные. С точки зрения фотограмметрии, подход к комбинированию снимков в камере UltraСam является более «честным» и точным. Несовпадение центров фотографирования вносит систематическую ошибку в итоговое изображение камеры DMC (рис. 1), величина которой зависит от высоты съемки [1]. Тем не менее, исследования [2] показывают, что точность результатов, обеспечиваемая этими камерами, практически одинакова.
Еще одним способом получения цифровых изображений большого размера является использование светочувствительной линейки, которая, перемещаясь вместе с самолетом, формирует цифровой «ковер» произвольной длины. Этот способ, применяющийся при съемке с космических спутников, теперь реализован и в аэрофотосъемке. Наиболее известными камерами с таким подходом к получению изображения являются ADS 40 и ADS 80 (Leica Geosystems). Геометрия их снимков непривычна для фотограмметристов и сильно отличается от геометрии снимков кадровых систем (рис. 2). В отличие от спутниковых изображений, когда траектория движения аппарата не подвержена колебаниям, изображения ADS 40 и ADS 80 требуют дополнительной коррекции из-за вибрации и возмущений в движении носителя. Эта коррекция — уравнивание «ковров» снимков и преобразование изображений Level 0 в Level 1 — проводится с помощью программ, поставляемых с камерой.
Пользователи аналоговых камер привыкли к термину «масштаб съемки» и часто используют его для характеристики съемки цифровыми камерами. Съемка камерами типа RC-30 проводится на лавсановую пленку с размером кадра 23х23 см. Под масштабом съемки при этом понимают соотношение размера изображения объекта на пленке и реального его размера. Применение понятия «масштаб съемки» к снимкам, полученным цифровыми камерами, на наш взгляд, совершенно неверно. Для космических цифровых снимков используется понятие «размер пикселя» на местности (в англоязычной литературе — ground sample distance, GSD). Это понятие следует использовать и для цифровых камер. Рассмотрим варианты съемки, приведенные на рис. 3, где 1 — съемка аналоговой камерой с размером кадра 23x23 см; 2 — съемка аналоговой камерой с размером кадра 18x18 см; 3, 4 — съемка разными цифровыми камерами.
Как видно из рис. 3, все изображения одинаковы. Если же рассчитать масштаб съемки, то он разный для всех камер. Отметим, что понятие GSD (размер пикселя на местности), которым мы будем пользоваться, для аналоговых камер зависит от разрешения сканирования. При его использовании в дальнейшем будем считать, что сканирование пленки аналоговой камеры проведено с разрешением 15 мкм.
В табл. 1 приведены основные характеристики рассматриваемых камер.
Если в паспорте цифровой камеры не указано фокусное расстояние в пикселях, его легко рассчитать, разделив фокусное расстояние в миллиметрах на физический размер пикселя матрицы камеры. При работе в ЦФС со снимками, полученными цифровой камерой, вполне естественно измерять все величины в пикселях. Физический размер пикселя матрицы определяет ее светочувствительность. Чем больше размер ячейки, тем больше фотонов попадает на матрицу (при использовании одного объектива), что позволяет проводить съемку с меньшими выдержками или при худшем освещении.
Величина GSD, которая в конечном итоге определяет точность результатов дальнейшей обработки, вычисляется по формуле:
GSD = H/F,
где высота H измеряется в сантиметрах, а фокусное расстояние F в пикселях.
Для сравнения приведем значения GSD и размеры кадра на местности при съемке с разных высот (табл. 2).
Как видно из табл. 2, параметры снимков современных цифровых камер приближаются к параметрам снимков аналоговых камер, но пока еще не достигли их.
Кадры цифровых камер имеют прямоугольную форму. Вообще говоря, цифровые камеры на носителе (самолете) можно монтировать различным образом. Для обеспечения большего захвата при маршрутной съемке или для экономии горючего при площадной съемке цифровые камеры монтируются так, чтобы большая сторона кадра располагалась поперек движения носителя (рис. 4).
Величина GSD определяет порядок точности результатов в плане, реальная точность может быть несколько лучше при использовании маркированных точек и автоматических процедур измерения и хуже при наличии систематических ошибок, плохой калибровке камеры. Для получения точности результатов по высоте следует разделить величину GSD на B/H — отношение базиса съемки к ее высоте. Так как для уравнивания блока снимков требуется перекрытие 60%, то B/H легко рассчитать (табл. 3).
Значение B/H для камер ADS 40/ADS 80 определяется выбором варианта формирования стереопар (назад-надир, надир-вперед или назад-вперед). Как видно из табл. 3, B/H для большинства цифровых камер близко к значению для камеры RC-30 с длиннофокусным объективом. В случае использования автоматических измерений (коррелятора) точность измерений по высоте будет определяться формулой:
dZ = c ( GSD/(B/H),
где c — «качество» снимка. По косвенным признакам (ошибки взаимного ориентирования, точность свободных триангуляционных моделей) для некоторых цифровых камер величина с может доходить до 0,1.
Одной из паспортных характеристик цифровых камер является число кадров в секунду — FPS. Максимальные значения FPS для разных камер приведены в табл. 4.
Последней позицией в табл. 4 указана камера VisionMap A3 (VisionMap Ltd., Израиль), обладающая уникальным числом кадров в секунду [3]. Значение FPS ограничивает минимальную высоту съемки (минимальное значение GSD). Дело в том, что самолет, на котором установлена камера, не может иметь скорость меньше определенной. Для фотограмметрической обработки блока аэросъемки требуется перекрытие соседних снимков в маршруте не менее 60%. Поэтому скорость самолета V, высота H и FPS связаны формулой:
V = H ( FPS ( 0,4 ( (S/F) = 0,4 ( FPS ( S ( GSD,
где S — размер кадра в пикселях вдоль оси полета (как правило, меньшая сторона кадра).
Важной характеристикой цифровой съемки является ее качество. Многие современные цифровые камеры позволяют получать снимки с глубиной цвета более 8 бит на канал, что дает возможность рассмотреть детали в тенях, недоступные при аналоговой съемке. Некоторые камеры могут получать снимки в инфракрасном (ближнем и дальнем) диапазоне. Рассмотрим подробнее получение цветных изображений цифровыми камерами. В простейшем случае (камеры малого и среднего форматов) цветное изображение формируется прямо во время съемки с помощью так называемой байеровской матрицы [4]. Светочувствительная матрица содержит по 25% красных и синих элементов и 50% зеленых элементов (рис. 5).
С точки зрения фотограмметрической точности эффект такой обработки изучен мало, но при использовании площадных корреляторов, скорее всего, не приведет к ее снижению.
Камеры ADS 40 и ADS 80 используют другой подход к формированию цветного изображения. За специальным объективом расположены линейки с одинаковым разрешением (12 тыс. пикселей), чувствительные к разным диапазонам (R, G, B, IR, GrayScale). При этом в ADS 80 за счет использования тетрахроидной оптики не нужна дополнительная обработка при совмещении каналов для получения полноценного цветного изображения (в ADS 40 может потребоваться предварительное ортотрансформирование).
Для снижения стоимости производители камер UltraСam и DMC кроме черно-белых матриц с высоким разрешением устанавливают цветные матрицы с более низким разрешением. Для получения цветного изображения с высоким разрешением в этом случает необходимо использовать алгоритм паншарпенинга (pan-sharpening, рис. 9).
В камере DMC на один цветной пиксель приходится 22 черно-белых, в UltraСam — 9; для камер ADS паншарпенинг не нужен, так как соотношение цветных и черно-белых пикселей составляет 1:1. Соотношение цветных и черно-белых пикселей важно знать для дешифрирования, для фотограмметрических задач достаточно черно-белого изображения.
Часто цифровые камеры поставляются вместе с приемниками спутникового позиционирования или GPS/IMU-системами. Эксплуатация камер ADS 40/ADS 80 вообще невозможна без использования GPS/IMU. Раньше считалось, что необходимым условием использования данных GPS является дифференциальный режим измерений и наличие базовых станций, расположенных в 30–50 км от места проведения съемки. Однако установка базовых станций при съемке труднодоступных или удаленных районов требует существенных затрат. Методы обработки данных GPS на основе эфемерид спутников, доступных через несколько дней после съемки, становятся все более точными. Эти методы получили название PPP (Precise Point Positioning). Согласно отчету компании
NovAtel, Inc. [5], точность определения координат при использовании PPP в последних версиях программного обеспечения GrafNav приближается к точности дифференциальных методов и пригодна для ЦФС (табл. 5).
Если на борту самолета дополнительно установлен лазерный сканер, который позволяет получать облако точек в полете, то фотограмметрическая обработка снимков еще больше упрощается, так как после постобработки сканерных данных для построения ортофотопланов уже будет в наличии модель рельефа местности. Для использования технологии лазерного сканирования необходимы GPS/IMU-системы класса не ниже (а иногда и выше), чем для цифровых камер.
Технологии прямого геопозиционирования с помощью GPS/IMU-систем и получения рельефа местности с помощью лазерного сканирования все чаще применяются при реализации производственных проектов. Приведем пример из практики нашей компании (рис. 10): съемка с высоты 1200 м проводилась камерой UltraСam D (GSD = 9 см), общий размер блока составил 1010 снимков, для блока были подготовлены восемь контрольных планово-высотных точек и цифровая модель рельефа, сформированная по данным лазерного сканирования. При использовании прямого геопозиционирования точность по контрольным точкам составила 17 см, что позволило рассчитать ортофотопланы масштаба 1:2000 без уравнивания и стереообработки. Для части блока (294 снимка) требовалось создать ортофотоплан масштаба 1:500. Для этого в пределах указанной территории была выполнена аэротриангуляция, что позволило достичь точности 8 см.
За рамками статьи остались вопросы, связанные с архивированием и хранением данных цифровой съемки. Если результаты сканирования снимка аналоговой камеры можно просто стереть (при необходимости снимок сканируется заново), то цифровые снимки следует хранить на оптических носителях, жестких дисках или стримерах. Мы не рассмотрели и экономические аспекты использования такого оборудования, как цифровые камеры, GPS/IMU-системы, лазерные сканеры. Безусловно, для различных проектов и работ их приобретение имеет разную экономическую привлекательность. Крупноформатные цифровые камеры позиционируются как оборудование, способное полностью заменить аналоговые камеры. Среднеформатные камеры больше подходят для маршрутной съемки или съемки небольших блоков. В ближайшие годы, надеюсь, произойдут дальнейшее улучшение характеристик цифрового оборудования, снижение его стоимости и повышение привлекательности для покупателей.
В предыдущих разделах мы подробно рассматривали векторные данные. В то время как векторные объекты используют геометрию (точки, полилинии и полигоны) для представления объектов реального мира, растровые данные основаны на другом подходе. Растры являются матрицами пикселей (также называемых ячейками), каждый из которых хранит определенное значение для области, соответствующую этому пикселу (см. Рисунок 52). В данном разделе мы подробнее изучим растровые данные и случаи их использования.
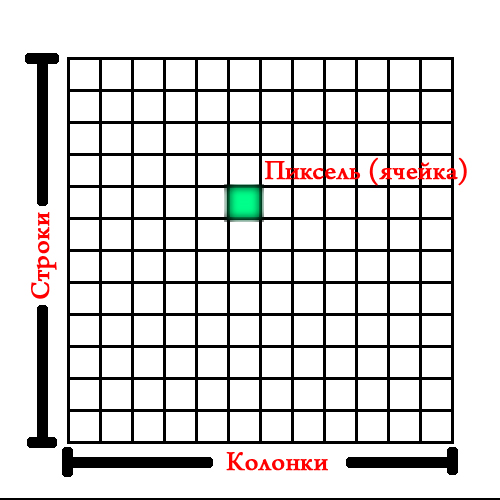
Рисунок 52: Растровые данные состоят из строк (горизонтальные полосы) и колонок (вертикальные полосы) пикселей (также называемых ячейками).
Каждый пиксель соответствует определенной географической области, и значение пикселя означает какое-либо свойство, присущее этой области.
Подробнее о растровых данных:
Растровые данные используются в ГИС-приложении для отображения информации, которая носит непрерывный характер. Во введении в векторные данные мы показывали фотографию на Рисунке 53. Точки, линии и полигоны хорошо работают для представления отдельно стоящих элементов пейзажа, таких как деревья, дороги и строения. В то же время, другие элементы с помощью векторных объектов представить проблематично. Например, изображенные луга имеют много различий в цвете и плотности травяного покрова. Можно было бы сделать достаточно просто, обведя каждый луг единым полигоном, но много информации о лугах будет утеряно в ходе упрощения до простого полигона. Это происходит потому, что когда Вы присваиваете векторному объекту атрибутивное значение, оно соответствует всему объекту, то есть векторные объекты не очень хороши в представление негомогенных объектов (те, что неодинаковы на своем протяжении). Альтернативный подход заключается в оцифровке полигонов для каждой части луга, имеющей индивидуальный цвет и плотность покрова. Проблема в том, что этот подход неудобен и требует огромных трудовых и временных затрат.

Рисунок 53: Точки, линии и полигоны хорошо работают для представления некоторых элементов пейзажа, таких как деревья, дороги и строения. В других случаях это может быть непросто. Например, как бы Вы представили луга и пастбища? Как полигоны? А что на счет вариаций цвета, которые Вы можете видеть? Когда Вы представляете большие области с непрерывно меняющимися показателями, лучшим выбором будут растровые данные.
Использование растровых данных является решением данной проблемы. Многие специалисты используют растровые данные в качестве подложки, отображаемой под векторными данными для их более полного понимания. Человеческий глаз очень хорошо распознает изображения, поэтому использование растрового изображения под векторными слоями наполняет карту смыслом. Растровая модель данных хороша не только для изображений поверхности реального мира (таких как аэрофотоснимки и спутниковые снимки), но и для представления более абстрактных категорий, таких как распределение осадков или риск возникновения пожара на территории. В этих случаях каждая ячейка растра имеет собственное значение, например миллиметры осадков в год или риск возникновения пожара от 1 до 10.
Пример, показывающий разницу между спутниковым снимком и изображением, содержащим рассчитанные показатели, приведен на Рисунке 54.

Рисунок 54: Полноцветное растровое изображение (слева) полезно тем, что оно показывает много деталей о местности, которые было бы сложно сохранить в виде векторных объектов, но легко увидеть на изображении. Растровые данные также могут быть нефотографическими, например показывать рассчитанные значения средней температуры (справа).
Привязка снимка к карте:
Привязка снимка к карте – это процесс установления точного местоположения территории, соответствующей снимку, на поверхности Земли. Позиционная информация хранится в цифровой версии снимка. Когда ГИС-приложение открывает снимок, оно использует позиционную информацию, чтобы «положить» снимок на правильный участок карты. Обычно эта информация включает координаты верхнего левого пиксела изображения, размер одного пиксела по осям Х и Y, и градус поворота изображения (если есть). С этим набором значений ГИС-приложение может обеспечить отображение снимка в правильном месте. Позиционная информация часто прилагается к растру в виде отдельного текстового файла.
Источники растровых данных:
Растровые данные могут быть получены различными способами. Два наиболее распространенных способа – аэрофотосъемка и спутниковая съемка. В первом случае самолет с закрепленной на дне камерой облетает территорию. Затем фотографии копируются на компьютер и происходит их привязка к карте. Спутниковые снимки создаются искусственными спутниками, вращающимися вокруг Земли по определенным орбитам. Снимки отправляются на Землю с помощью радиосигналов и принимаются специальными станциями (см. Рисунок 55). Процесс получения растровых данных с помощью самолетов или искусственных спутников называется дистанционным зондированием.

Рисунок 55: Центр Спутниковых Технологий неподалеку от Йоханнесбурга, ЮАР. Специальные антенны отслеживают спутники, проходящие над Центром и принимают изображения, закодированные с помощью радиоволн.
В других случаях, растровые данные могут быть результатом расчетов. Например, страховая компания может использовать отчеты о преступлениях и создать карту, показывающую концентрацию преступлений в разных местах. Метеорологи регулярно составляют карты средней температуры, количества осадков и преобладающих направлений ветра (см. Рисунок 54 выше). В этих случаях они используют такие технологии, как интерполяция (которую мы описываем в Разделе 10).
Иногда растровые данные создаются на основе векторных данных, т.к. обладатели этих данных хотят опубликовать их в общедоступном формате. Например, компания, располагающая векторными данными о дорогах и земельных участках, генерирует растровые версии данных, чтобы ее работники могли свободно просматривать эти данные в веб-браузере. Этот подход полезен, когда атрибуты, которые нужно показать пользователями, могут быть отображены на карте с помощью надписей или условных обозначений. Если пользователю нужно иметь возможность просматривать или анализировать атрибутивную таблицу, растровые форматы не подойдут для такой задачи, т.к. большинство из них не имеет связанной атрибутивной таблицы.
Пространственное разрешение:
Каждый растровый слой в ГИС имеет пиксели (ячейки) фиксированного размера, которые определяют его пространственное разрешение. Это хорошо видно, когда Вы смотрите на изображение в мелком масштабе (см. Рисунок 56), а затем приближаете его (см. Рисунок 57).

Рисунок 56: Спутниковый снимок выглядит хорошо в мелком масштабе.

Рисунок 57: . но когда пользователь переходит на более крупный масштаб отображения,
он может видеть отдельные пиксели, из которых состоит снимок.
Ряд факторов определяет пространственное разрешение изображения. Для спутниковых данных, пространственное разрешение обычно зависит от возможностей сенсора, с помощью которого получено изображение. Например, спутники SPOT5 могут осуществлять съемку изображений с размером пиксела 10х10 м. Другие спутники, такие как MODIS, производят съемку с разрешением всего 500х500 м. Для аэрофотосъемки достаточно распространены разрешения порядка 50х50 см. Изображения с размером пиксела, соответствующим маленькой области на поверхности Земли, классифицируются как имеющие высокое разрешение. Изображения с размером пиксела, соответствующим большой области, имеют низкое разрешение, т.к. у снимков низкая степень детализации.
В растровых данных, которые создаются методами пространственного анализа (таких как карты количества осадков), пространственное разрешение определяется плотностью информации, используемой для вычислений. Например, если Вы хотите создать карту осадков с высоким разрешением, Вам понадобятся данные с большого количества метеостанций, находящихся достаточно близко друг от друга.
Одна из главных вещей, о которых необходимо помнить, работая с растрами высокого пространственного разрешения, – требования к размеру жесткого диска. Допустим, растр размером 3х3 пикселя в сумме имеет 9 пикселей, и его хранение требует место для 9 числовых значений в памяти компьютера. Представим, что нам нужен растр для всей территории Южной Африки с разрешением 1х1 км. Территория ЮАР составляет примерно 1,219,090 кв.км, что означает больше миллиона числовых значений на жестком диске компьютера. Уменьшение размера пикселя приведет к увеличению их количества, что вызовет сильное возрастание потребности в компьютерной памяти.
Иногда полезно работать с изображением низкого разрешения, если Вас интересует большая область и Вам не нужны детали местности. Карты облачности являются отличным примером – их показывают в масштабах государства. Изображение конкретного облака с высоким разрешением мало скажет Вам о надвигающейся погоде!
С другой стороны, использование данных низкого разрешения может быть проблематично, если Вам интересна небольшая область, т.к. Вы скорее всего не сможете извлечь никаких деталей.
Спектральное разрешение:
Когда Вы делаете цветную фотографию цифровым фотоаппаратом, он использует электронные сенсоры для обнаружения красного, зеленого и синего света. Когда фотография отображается на экране или выводится на печать, красный, зеленый и синий цвета (RGB, от англ. Red, Green, Blue) комбинируются для показа спектра цветов, понятного Вашему глазу. Хранение RGB-данных в цифровом формате осуществляется отдельно для каждого из трех цветовых каналов.
В то время как человеческий глаз способен различать только комбинации красного, зеленого и синего цветов, электронные сенсоры могут обнаруживать световые волны другой длины, невидимые для нас. Конечно, цифровые фотоаппараты навряд ли записывают информацию о невидимых частях электромагнитного спектра, потому что люди заинтересованы в сохранении на фотографиях только того, что они могут увидеть сами. Растровые изображения, включающие данные о невидимых участках спектра, часто называются мультиспектральными изображениями. Запись невидимых участков спектра может дать нам полезную географическую информацию. Например, измерение инфракрасного излучения может быть полезным для обнаружения воды в почве.
Так как изображения, содержащие многочисленные цветовые каналы, так полезны для задач ГИС, растровые данные часто поставляются в виде многоканальных изображений. Каждый канал изображения является отдельным слоем. ГИС-приложение комбинирует три различных канала и показывает их как красный, зеленый и синий, чтобы мы могли увидеть их невооруженным глазом. Число каналов в растровом изображении часто называют спектральным разрешением.
Если изображение состоит из одного канала, оно называется черно-белым. Имея черно-белое изображение, можно применить к нему различные цветовые схемы, чтобы сделать различия в значениях пикселей более очевидными. Изображения с цветовыми схемами называют псевдоцветными изображениями.
Получение векторных данных на основе растровых данных:
В ходе обсуждения векторных данных мы отметили, что растровые данные часто используются в качестве подложки при оцифровке. Другой подход заключается в использовании продвинутых компьютерных программ для автоматического распознавания векторных объектов на изображениях. Некоторые объекты, такие как дороги, обнаруживаются по резкому перепаду значений соседних пикселей. Компьютерная программа ищет подобные перепады и автоматически создает векторные объекты на их основе. Подобная функциональность обычно доступна только в высокоспециализированных (и очень дорогих) ГИС-приложениях.
Получение растровых данных на основе векторных данных:
Иногда бывает полезно конвертировать векторные данные в растровые данные. Побочным эффектом такого преобразования выступает потеря атрибутивных данных, связанных с векторной геометрией. В то же время, такая конвертация может быть полезной, если Вам необходимо предоставить геоданные людям, которые не являются специалистами в сфере ГИС. Имея изображение в распространенном формате (например, JPEG), они смогут просмотреть его на своих компьютерах без необходимости устанавливать специализированное ГИС-приложение.
Анализ растров:
Существует множество интересных аналитических инструментов для работы с растровыми данными. Например, растры могут быть использованы для моделирования водного стока на основе модели рельефа.
Растровые данные широко используются в сельском и лесном хозяйстве для определения биопродуктивности растительности. К примеру, обладая спутниковым снимком, Вы можете выявить области менее интенсивного произрастания культур, и затем использовать полученные данные для увеличения вноса удобрений в конкретных участках полей. Лесники используют растровые данные для оценки количества древесины и потенциала добычи дерева на различных территориях.
Растровые данные также очень важны в управлении чрезвычайными ситуациями. Анализ ЦМР (цифровых моделей рельефа, или растров, пиксели которых содержат информацию о высотах над уровнем моря) помогает в оценке потенциально затопляемых площадей. Полученные данные могут быть использованы для оценки областей, наиболее пострадавших от наводнения, и концентрации спасательных работ на этих территориях.
Об этом следует помнить:
Как мы уже упомянули, растровые данные высокого разрешения требуют большой объем дискового пространства на компьютере.
Что мы узнали?
Закрепим изученный материал:
- Растровые данные представляют собой сеть пикселей одинакового размера.
- Растровые данные хорошо служат для представления непрерывно изменяющихся значений.
- Размер пиксела изображения на местности определяет его пространственное разрешение.
- Растровые изображения могут содержать один или несколько цветовых каналов, каждый из которых покрывает одну и ту же область, но хранит данные о разных волновых диапазонах.
- Когда растровые данные содержат различные спектральные каналы, они называются мультиспектральными.
- Три канала мультиспектрального изображения могут быть показаны красным, зеленым и синим цветами.
- Изображения с одним каналом называются черно-белыми.
- Одноканальные черно-белые изображения могут быть отображены в ГИС-приложении с помощью псевдоцветов.
- Растровые изображения могут занимать большое дисковое пространство.
Попробуйте сами!
Ниже приведено несколько примеров практических заданий для Ваших учеников:
- Обсудите с учениками, в каких ситуациях Вы использовали бы векторные данные, а в каких растровые.
- Попросите учеников создать «растровую» карту района вокруг Вашего учебного заведения, используя кальку формата А4 с нанесенной сеткой. Наложите кальку на лист топографической карты или на аэрофотоснимок и попросите учеников закрасить клетки в сетке в соответствии с категориями объектов (здания, спортивные участки, деревья, тропинки и т.д.). Когда работа будет закончена, посмотрите какие объекты хорошо отображаются с помощью растровой графики и подумайте, как изменения размера ячеек скажется на возможности представления различных типов объектов.
Если у Вас нет компьютера:
Вы можете показать как работают растровые данные, используя бумагу и карандаш. Нарисуйте сетку с квадратными ячейками на бумаге и подумайте, как можно изобразить футбольное поле на этой сетке. Заполните сетку номерами, означающими покрытие поверхности на каждой ячейке. Если земля голая, впишите 0. Если есть частичное покрытие травой, впишите 1. Если область ячейки полностью покрыта травой, впишите 2. Теперь возьмите карандаши или маркеры и закрасьте ячейки, основываясь на их значениях. Ячейки с нулевыми значениями закрашиваются коричневым цветом, единицы закрашиваются светло-зеленым, двойки – темно-зеленым. Когда Вы закончите, у Вас будет растровое изображение Вашего футбольного поля!
Дополнительные материалы:
- Chang, Kang-Tsung (2006): Introduction to Geographic Information Systems. 3rd Edition. McGraw Hill. (ISBN 0070658986)
- DeMers, Michael N. (2005): Fundamentals of Geographic Information Systems. 3rd Edition. Wiley. (ISBN 9814126195)
Руководство Пользователя QGIS также содержит более подробную информацию о работе с растрами в QGIS.
В следующем разделе мы подробнее изучим топологию, чтобы понять, как отношения между векторными объектами могут послужить для обеспечения наилучшего качества данных.
1. Обоснование пространственного разрешения снимка (размера пикселя на местности) в зависимости от масштаба создаваемой или обновляемой карты. О возможных масштабах карт в зависимости от пространственного разрешения снимков
Космическая съемка в видимом спектральном диапазоне и ближнем инфракрасном в последнее время претерпели весьма ощутимое развитие в сторону увеличения разрешающей способности космических изображений. Это принципиально делает возможным использование этой информации, в том числе для целей картографирования и обновления карт. При этом возникает вопрос: о каких масштабах карт может идти речь?
Применительно к цифровой аэрофотосъемке или космической цифровой съемке, ни в каких российских нормативно-технических документах не содержится требований к пространственному разрешению в зависимости от масштаба карты, плана или ортофотоплана. В Инструкции по фотограмметрическим работам при создании цифровых топографических карт и планов [1] в Приложении 5 (стр. 90 - 91) изложена методика расчета размера пикселя при сканировании аналогового снимка в зависимости от масштаба фотографирования и масштаба создаваемой карты, содержащая 4 формулы вычисления, из которых к нашему случаю имеют отношение только первая (Ps) и последняя (Pp):
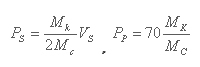 |
где Mk - знаменатель масштаба карты (плана), Mc - знаменатель масштаба аэрофотоснимка, Vs - требуемая точность определения плановых координат равная 0.2 мм. Первая из этих формул дает размер пикселя в мм, вторая в микронах. Прямого отношения к требованиям размера пикселя на местности цифровой аэрофотосъемки или космической съемки эти формулы не имеют, но в некоторых случаях за неимением иных требований их используют, преобразовав к виду, позволяющему оценить размер пикселя на местности в метрах:
 |
Для масштаба плана 1:5000 при масштабе снимка 1:20000 Ps = 0.5 м; Pp=0.35 м.
Согласно Инструкции по фотограмметрическим работам использовать нужно меньшее. Однако расчет Pp основан на требованиях к графическому качеству напечатанного на бумаге ортофотоплана, заключающемуся в том, чтобы размер полутонового пикселя не превышал 70 мкм. По этой причине основываться на этом критерии выбора размера пикселя в том случае, когда ортофотоплан используется в цифровом виде или когда его твердая копия печатается с помощью плоттера (принтера), не обеспечивающего разрешение с размером полутонового пикселя равным 70 мкм, нет никаких причин. Таким образом, при использовании ортофотоплана в цифровом виде представляется более логичным пользоваться критерием Ps, основанном на требуемой точности измерений. Это означает, что согласно требованиям Инструкции по фотограмметрическим работам для масштаба 1:5000 размер пикселя на местности может достигать 0.5 м. Но даже и это значение представляется необоснованным, т.к. критерий Ps основан просто на том, что размер пикселя должен быть в 2 раза меньше допустимой ошибки измерения по ортофотоплану, а ошибка измерения составляет 0.2 мм в масштабе плана. Этот подход просто не имеет никакого обоснования. С одной стороны, точность измерений по цифровому изображению составляет доли пикселя, но не 2 пикселя и в любом случае не хуже 1 пикселя! Следует обратить внимание, что в этом подходе совершенно не учитывается возможность дешифрирования снимков, т.е. распознавания объектов и определения их характеристик.
Т.е. представленные в Инструкции по фотограмметрическим работам формулы расчета размера пикселя на местности отражают линейную зависимость размера пикселя от масштаба карты, что в принципе не должно быть с учетом задачи дешифрирования (распознавания объектов и их характеристик). Если проанализировать требования к допустимым масштабам фотографирования в зависимости от масштаба карты (плана), сформулированные в Инструкциях по топографической съемке [2, 3], акцентируя внимание на задаче дешифрирования, и принять, что разрешение аналоговых снимков на момент издания инструкций составляло не более 20-30 линий на мм (рассчитывать на более высокое разрешение нет оснований), то получится ряд значений размера пикселя, представленный в таблице 1.
Таблица 1. Размер пикселя на местности в зависимости от масштаба карты (плана)
А эрофотосъемка летательных аппаратов (далее по тексту - БПЛА) за последние годы получила широкое распространение. филиале «Госземкадастрсъемка» - ВИСХАГИ работы по созданию аэрофотосъемочного комплекса на базе БПЛА ведутся уже более десяти лет. Несмотря на распространенное мнение о простоте съемки с БПЛА, при проведении аэрофотосъемочных работ для целей картографирования возникает ряд проблем, связанных с выбором параметров аэрофотосъемки и полета БПЛА.
- высота аэрофотосъемки;
- расстояние между маршрутами;
- расстояние между центрами фотографирования на маршруте.
- барометрический высотомер;
- GPS-навигатор;
- датчик авиагоризонта;
- видеоизображение с установленной в носовой части самолета камеры.
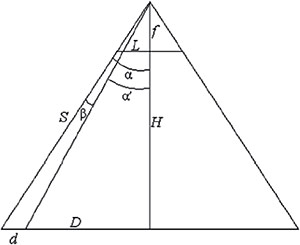
Высота аэрофотосъемки зависит от масштаба создаваемого фотоплана. Величина крайнего пикселя снимка на местности не должна превышать создаваемого фотоплана 1 . Например, при создании фотоплана масштаба пикселя на местности d не должна превышать разрешающей способности снимка следует производить для пикселей, наиболее удаленных от центра кадра. Схема связи размера крайнего пикселя снимка с местностью показана на рисунке 1.
f - фокусное расстояние камеры в эквиваленте
L - длина половины диагонали матрицы, она составит
H - высота фотографирования во время аэрофотосъемки;
D - длина половины диагонали снимка на местности.
Из рисунка 1 следует:
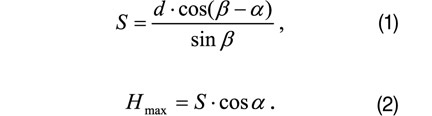
Расчет максимально допустимой высоты аэрофотосъемки выполняется по формуле α зависит от индивидуальных параметров используемой фотокамеры и может быть рассчитан исходя из величины фокусного расстояния, эквивалентного
- поперечное смещение от оси маршрута - ± 10 м;
- удерживание БПЛА на запроектированной высоте - ± 15 м;
- расстояние от запроектированного центра фотографирования до точки срабатывания затвора фотоаппарата - ± 5 м;
- изменение угла крена БПЛА на маршруте между двумя снимками - 10°;
- изменение угла тангажа БПЛА на маршруте между двумя снимками - 6°.

С учетом погрешности барометрического датчика рассчитаем высоту полета:

Половину ширины захвата местности камерой, рассчитаем по формуле:

Расстояние между маршрутами в идеальных условиях вычисляется по формуле:

где k перекрытия снимков.
Для обеспечения надежного сплошного покрытия земной поверхности снимками необходимо учесть максимальные отклонения БПЛА от запроектированного маршрута. По формуле минимальное значение половины ширины захвата местности во время аэрофотосъемки с учетом совокупности погрешностей навигационных данных и пилотирования летательного аппарата:

Предельное отклонение между двумя маршрутами составит:

Расстояние между маршрутами с учетом поперечного смещения БПЛА относительно оси маршрута, удерживания высоты полета и углов наклона камеры вычисляется по формуле:

Воспользовавшись формулами высоту полета БПЛА для выбранных фотоаппаратов и расстояние между маршрутами при создаваемом масштабе фотоплана данные представлены
Расчет высоты фотографирования и расстояния между маршрутами
Расстояние между центрами фотографирования на маршруте рассчитаем по аналогии с расстоянием между маршрутами. По формуле половину продольного угла захвата камеры, где L равна половине длины и составляет 18 мм. Расстояние между центрами фотографирования в идеальных условиях вычислим по формуле перекрытия снимков коэффициент k будет равен минимальное значение половины длины захвата местности во время аэрофотосъемки. Предельное отклонение от расстояния между снимками, рассчитанного в идеальных условиях, вычисляется по формуле между центрами фотографирования с учетом погрешности навигационных координат, удерживания высоты полета и углов наклона камеры вычисляется

Результаты, полученные в ходе вычисления расстояния между центрами фотографирования вдоль маршрута, приведены
Расчет расстояния между центрами фотографирования
По данным таблиц 1 и 2 на примере фотоаппарата карточку параметров аэрофотосъемки с БПЛА для целей получения фотоплана масштаба приведены
Карточка параметров АФС с БПЛА для целей картографирования
Расчет параметров аэрофотосъемки - очень важный этап подготовительных работ. Правильно рассчитанные параметры позволяют увеличить площадь, покрываемую за один полет БПЛА, при более высоком качестве фотоматериалов, находящих применение землеустроительных и кадастровых работах.

Александр Костюк, инженер ООО «Лаборатория автоматизации геодезических и фотограмметрических работ»
Читайте также: