
Управление процессорным вентилятором pwm mode что это
Обновлено: 06.07.2024
Непонимание работы ШИМ или PWM ( Pulse-width modulation ) часто приводит не только к их неправильному использованию, но даже к ошибкам в проектировании устройств использующих ШИМ для управления. Здесь, ограничившись конкретным применением, я попытаюсь рассказать что такое ШИМ, для чего она требуется и как работает.
Сначала, что такое ШИМ.
Когда нужна ШИМ
Главной причиной применения ШИМ является необходимость обеспечить пониженным постоянным напряжением силовых устройств электроники при сохранении высокого КПД, особенно в управляемых электроприводах.
Во внутренних сетях аппаратуры для питания устройств используется постоянное напряжение ограниченного набора напряжений, которые часто требуется изменить под требования конкретного устройства, стабилизировать или регулировать его. Это могут быть электроприводы постоянного тока, чипы, узлы радиоаппаратуры.
Регулировку можно осуществлять с помощью гасящих напряжение устройств: резисторов, транзисторов (если требуется регулировка). Главный недостаток такого решения потери мощности и повышенное тепловыделение на регулирующих устройствах.
Поскольку известно что выделяемая мощность равна :
P = I x U или P = I 2 x R Вт.
то чем больше ток I в цепи и падение напряжения U , тем больше потери мощности. Здесь R - величина сопротивления регулирующего элемента.
Представьте что требуется погасить хотя бы 3 V при токе нагрузки 10 A , это уже 30 Вт истраченных в пустую. А каждый ватт теряемой мощности не только снижает продолжительность работы источников питания, но и требует дополнительного оборудования для вывода выделяемого, этой мощностью, тепла.
Это относится к гасящим резисторам и полупроводниковым приборам тоже.
Но хорошо известно, что полупроводниковые приборы очень хорошо (с малыми потерями и тепловыделением) работают как ключи, когда имеют только два состояния открыт/закрыт.
Этот режим позволяет снизить потери на коммутирующем полупроводниковом приборе до уровня:
U нас для современных полупроводниковых коммутаторов приближается к 0,3 v и при потребляемых токах 10 А потери мощности будут приближаться к 3 Вт. Это в режиме ключа, а при работе в устройствах ШИМ и меньше.
Реализовать преимущества ключевого режима в схемах понижающих и регулирующих напряжение постоянного тока, позволило использование ШИМ.
Повторюсь, широтно-импульсная модуляция — управление средним значением напряжения на интегрирующей нагрузке путём изменения скважности импульсов, с помощью управляющего ключа.
Работа ШИМ на интегрирующую нагрузку показана на рис. 1.

Главным условиям такого применения ШИМ является наличие интегрирующей нагрузки.
Потому что амплитудное значение напряжения равно E .
Это могут быть интегрирующая RC, LC, RLC или RL цепи и механические интеграторы (например электромотор).
При работе ШИМ на интегрирующей нагрузке напряжение - эквивалентное постоянное напряжение изменяется в зависимости от скважности ( Q ) импульсов.
здесь: Q - скважность, t и - длительность импульса, T - период следования импульсов.
С учетом скважности эквивалентное постоянное напряжение будет равно:
E экв = Q x E Вольт
здесь: E экв - эквивалентное постоянное напряжение ( Вольт ), Q - скважность, E - напряжение источника от которого запитан ШИМ преобразователь ( Вольт ).
Реально на зажимы нагрузки ШИМ подается напряжение равное E , а работа совершаемая электрическим током (или число оборотов электродвигателя) определяется именно E экв . При восстановлении на интегрирующем конденсаторе получаем именно напряжение E экв.
Мощность выделяемая на управляющем ключе, управляемом ШИМ равна:
Схема подключения нагрузки к ШИМ.
Никаких отличных от схемы включения электродвигателя на постоянном токе (частный случай нагрузки) схемных решений ШИМ не требует. Просто электродвичатель подключается к источнику питания работающего в режиме ШИМ. Разве что, в определенных ситуациях требуется ввести дополнительную фильтрацию помех возникающих на фронтах импульсов. Этот фильтр на рис. 2 в виде конденсаторов и демпфирующего диода.
На рис. 2 показано такое подключение.
Мы видим, что коммутатор (полевой транзистор) можно просто заменить на переменный резистор.
Схема PWM
здесь: GND - земля (общий), Control - контакт P WM управления, +12 - напряжение питания, Sense - вывод датчика оборотов.
В данной схеме управление возможно скорее постоянным током +I упр, чем ШИМ сигналом.
Для управления импульсным (ШИМ) сигналом требуется схема изображенная на рис. 4. Да и судя по параметрам транзистора "PWM" он выбирался именно для управления постоянным током. По крайней мере он будет нормально работать в таком режиме с вентилятором до 1,6 Вт.
А вот в импульсном режиме без конденсатора C , транзистор BC879 будет греться немного меньше чем на постоянном токе и возможен останов электродвигателя на малых длительностях токового импульса (малых оборотах) из-за его интегрирования на входной емкости C вх транзистора.
Основные параметры кремниевого биполярного высокочастотного n-p-n транзистора BC879 от SIEMENS
В случае необходимости отключить PWM (ШИМ) управление в схеме показанной на рис. 3 необходимо просто соединить вывод Control с проводом +12v .
Существенных отличий от рис. 3 нет, только в качестве управляемого ШИМ ключа используется МОП полевой транзистор со встроенным или индуцированным каналом p- типа. Данная схема тоже может управляться как P WM так и постоянным напряжением (но рисковать не стоит - надо знать параметры транзистора).
Данная схема вполне работоспособна и не имеет недостатков схемы показанной на рис. 3.
Для отключения (в зависимости от типа транзистора) достаточно соединить вывод Control с проводом + или -.
Вниманию самодельщиков!
Я бы не рекомендовал применение вентиляторов имеющих встроенный PWM (4- pin ) одновременно с какими либо иным регуляторам оборотов вентилятора.
В случае если Вас не устраивает алгоритм управления PWM встроенного на материнскую (системную) плату.
И у Вас есть устраивающий Вас реобас (контроллер управления вентилятором), то используйте вентилятор с 3-pin соединитель.
Если вентилятор с PWM вам дорог или не имеет замены - то необходимо отключить PWM , способом описанным выше, заменив соединитель 4-pin на 3-pin и подключить к реобасу.
Но помните применение вентилятора с PWM в любом нештатном режиме не позволит достичь его максимальной производительности.
Применение одновременно с PWM - токового управления на постоянном токе не рекомендуется по причине снижение напряжения питания вентилятора на 10-20%, что не даст вывести такой вентилятор на полную производительность.
Применение одновременно с PWM - ШИМ по цепи питания может привести к периодической нестабильности работы вентилятора (возможно возникновение скользящих биений между частотами PWM - ШИМ по цепи питания систем) и создать неоднозначность для систем оснащенных системой стабилизации оборотов. Кроме того как и в предыдущем случае на 10-15% снизится результирующее напряжение на вентиляторе, что не даст вывести такой вентилятор на полную производительность.
Так что остановитесь на чем-то одном. Или используйте вентилятор с PWM , или применяйте внешнее управление вентилятором по цепи питания на вентиляторе с 3-pin разъемом.
Заключение
Применение PWM или ,как привыкли говорить мы, ШИМ повышает КПД понижающих напряжение устройств постоянного тока, что снижает общее тепловыделение электронных устройств с ШИМ.
ШИМ позволяет создавать компактные системы регулируемого электропривода постоянного тока большой мощности.
В современных устройствах постоянного тока управляющих напряжением и понижающих стабилизаторах напряжениях обычно регулировки выполняются с помощью ШИМ. Для этого выпускаются контроллеры требующие минимум навесных элементов.
Собственно,в названии темы сам вопрос.Да,знаю,что DC-ты регулируешь напряжение,поступающее на крутилятор,а PWM-напрямую им управляешь,но что предпочтительнее,лучше и эффективней?Желательно поподробней,где лучше PWM,а где DC и при каких обстоятельствах.И еще вопрос:Если я поставлю в биосе например 50% оборотов кулера при температуре 50 градусов и 20% оборотов при 20 градусах(это через PWM регулировку естественно),то при температуре в 35 градусов кулер будет вращаться с оборотами 20% или же с усредненным значением тоже в 35%?Что будет,если сделать также,но в DC(Например,5 вольт напруга на кулер при 20 градусах и 8 вольт при 50 градусах,то при 35 градусах какое напряжение будет подаваться на кулер:по прежнему 5 вольт ибо температура не превысила отметку в 50 градусов или же усредненное значение в 6.5 вольт на вентилятор)?
DC-ты регулируешь напряжение,поступающее на крутилятор,а PWM-напрямую им управляешь
DC = изменение подаваемого напряжения напрямую, PWM - изменение PWM-импульсов для вентиляторов, которые умеют в PWM.
но что предпочтительнее,лучше и эффективней?Желательно поподробней,где лучше PWM,а где DC и при каких обстоятельствах.
А хз, честно. Имхо, PWM нужен для регулировки сразу нескольких вентиляторов через хаб, если тыкать каждый вентилятор в фан-разъём материнки, то смысла мало. Но это имхо, мб я не прав, и там есть какой-то особый смысл. Разницы в эффективности охлада нет, т.к. вентилятор в любом случае вращается на определённых оборотах. Плюсом у PWM вентиляторов есть чёткий диапазон скорости вращения (условно 1000-2000 оборотов) и ниже ты не прыгнешь. А вот путём изменения напряжения напрямую, можно снизить скороть вращения ниже 1000. Офк если вентилятор позволяет, т.к. не все вентиляторы работают на пониженном напряжении. Может случится, что двигатель не стартанёт вовсе или будет работать рывками.
И еще вопрос:Если я поставлю в биосе например 50% оборотов кулера при температуре 50 градусов и 20% оборотов при 20 градусах(это через PWM регулировку естественно),то при температуре в 35 градусов кулер будет вращаться с оборотами 20% или же с усредненным значением тоже в 35%?
А у тебя там полосочек графика нет что ли? Будет кривая линия между точками, т.е. на 35С будет 35%.
Что будет,если сделать также,но в DC
Будет тоже самое. DC и PWN - только способы регулировки оборотов.
(Например,5 вольт напруга на кулер при 20 градусах и 8 вольт при 50 градусах,то при 35 градусах какое напряжение будет подаваться на кулер:по прежнему 5 вольт ибо температура не превысила отметку в 50 градусов или же усредненное значение в 6.5 вольт на вентилятор)?
Не знаю как на мясе, но на гиге не указывается подаваемое напряжение. Указываются обороты таходатчика. Ну будет +- также как и с PWM. Я у себя в голове прикидываю чё каво, когда настраиваю - беру базовые цифры максимальных оборотов = это 12в, и тупо примерно считаю. Вот у меня есть вентиляторы 12в 1200 оборотов , банально - на 5в это 500 оборотов, на 6в - 600, и т.д. А вентилятор 12в 1800 оборотов на 5в не работает уже, а на 7в даёт
В последнее время тема использования интегральных схем для контроля скорости вращения вентиляторов в системах активного охлаждения компьютерных комплектующих и прочих электронных систем стала очень актуальна. Вследствие инициатив крупнейших игроков IT-рынка, вентиляторы, применяющиеся для охлаждения разнообразного оборудования более полувека, в последние годы претерпели существенные изменения. В этой статье мы рассмотрим причины и методы данного эволюционного движения.
Сегодняшний вектор развития электроники, особенно направленных на потребительский рынок устройств, задан на создание как можно более функциональных систем в минимально возможном форм-факторе. Это приводит к тому, что на одной и той же площади производители с каждым годом стараются умещать все больше транзисторов для увеличения функциональности и/или производительности чипов. Хорошим примером могут служить ноутбуки и карманные компьютеры, в которых процессорная и графическая мощь лишь возросли при уменьшении геометрических размеров и веса относительно первых представителей соответствующих классов. Естественно, освоение новых, все более тонких и совершенных технологических процессов производства помогает сдержать рост выделяемого при работе подобных полупроводниковых схем тепла, однако необходимость в его эффективном отводе полностью никуда не исчезает. Схожая ситуация возникает и с прочими устройствами, такими, например, как проекторы. Какие бы новые технологии ни внедрялись, без мощного источника света получить качественную картинку невозможно. А для стабильности работы, как и в случае с CPU/GPU и прочими микросхемами, тепло от ламп требуется отводить эффективно и, по возможности, бесшумно.
Действительно бесшумным методом отвода тепла можно считать лишь полностью пассивные системы, состоящие только из радиатора/теплотрубок. К сожалению, область применения таких СО ограничена: потолок по рассеиванию тепловой мощности этих изделий довольно низок, к тому же максимальная эффективность достигается лишь при большой площади рассеивания, а разместить достаточное количество ребер так, чтобы естественный приток воздуха их еще и равномерно омывал, бывает очень сложно, или даже невозможно. Хорошая альтернатива полностью бесшумным пассивным системам – активные кулеры, сочетающие в себе традиционные радиаторы с вентиляторами, создающими направленный воздушный поток. Однако присутствие движущихся частей означает наличие шума от работы. Кроме того, возрастает и общее энергопотребление, что может быть особенно важно при работе устройства от батареи с ограниченным зарядом. Наконец, с точки зрения надежности, добавление еще одного механического устройства несколько снижает общую отказоустойчивость.

«Возьми этот вентилятор. Он умеет управлять оборотами и работает бесшумно», — говорили форумные эксперты. Юзер послушал совет и купил комплект вертушек с надписью «silent». Но после первого включения системы компьютер улетел в открытое окно на воздушной тяге завывающих вертушек. Оказывается, вентиляторы не умеют самостоятельно контролировать обороты, даже приставка «бесшумный» здесь ничего не решает. Чтобы добиться тишины и производительности, необходимо все настраивать вручную. Как это сделать правильно и не допустить ошибок — разбираемся.
За режимы работы вентиляторов отвечает контроллер на материнской плате. Эта микросхема управляет вертушками через DC и PWM. В первом случае обороты вентилятора регулируются величиной напряжения, а во втором — с помощью пульсаций. Мы говорили об этом в прошлом материале. Способ регулировки зависит от вентилятора: некоторые модели поддерживают только DC или только PWM, другие же могут работать в обоих режимах. Возможность автоматической регулировки оборотов вентиляторов появилась недавно. Например, даже не все материнские платы для процессоров с разъемом LGA 775 могли управлять вертушками так, как это делают современные платформы.

С развитием микроконтроллеров и появлением дружелюбных интерфейсов пользователи получили возможность крутить настройки на свой вкус. Например, можно настроить обороты не только процессорного вентилятора, но и любого из корпусных и даже в блоке питания. Сделать это можно двумя способами: правильно или тяп-ляп на скорую руку.
Регулировка
Начнем с примитивного метода — программная настройка в операционной системе или «через костыли», как это называют пользователи. Настроить обороты вентилятора таким способом проще всего: нужно установить софт от производителя или кастомную утилиту от ноунейм-разработчика (что уже намекает на возможные танцы с бубном) и двигать рычажки. Нельзя сказать, что это запрещенный способ и его нужно избегать, но есть несколько нюансов.

Во-первых, не все материнские платы поддерживают «горячую» регулировку. PWM-контроллеры — это низкоуровневые микросхемы, которые управляются таким же низкоуровневым программным обеспечением, то есть, BIOS. Чтобы «достать» до микросхемы из системы верхнего уровня (операционной системы), необходима аппаратная поддержка как в самой микросхеме, так и на уровне драйверов от производителя. Если в актуальных платформах с такой задачей проблем не возникнет, то системы «постарше» заставят юзера потанцевать с настройками.
Во-вторых, программный метод управления вентиляторами хорош в том случае, если пользователь не занимается частой переустановкой ОС или не использует другие системы, например, Linux. Так как управлением занимается программа, то и все пользовательские настройки остаются в ней. Сторонний софт для аппаратной части компьютера — это никто и ничто, поэтому доступ к постоянной памяти, в которой хранятся настройки BIOS, получают только избранные утилиты.
В остальных случаях конфигурация будет сбрасываться каждый раз, когда юзер удалит фирменный софт или загрузится в другую систему. А компьютер снова попытается вылететь в окно при включении или перезагрузке — BIOS ничего не знает об отношениях вентиляторов и «какой-то» программы, поэтому будет «топить» на всю катушку, пока не загрузится утилита из автозагрузки.

Между прочим, это уже третье «но»: любой софт для управления системником придется добавлять в автозагрузку. Он заочно обещает быть самым прожорливым процессом в системе и снижать производительность, скорость отклика системы, а также стать причиной фризов в играх.
Верный путь компьютерного перфекциониста — один раз вникнуть в настройки BIOS и всегда наслаждаться тихой работой ПК. Причем сразу после включения, без дополнительного софта в автозагрузке и кривых драйверов, которые с удовольствием конфликтуют с другими программами для мониторинга, игровыми панелями и даже софтом для настройки RGB-подсветки. Тем более, интерфейс биоса уже давно превратился из древнего DOS-подобного в современный, с интуитивными кнопками, ползунками и даже с переводом на русский язык.
Что крутить?
BIOS материнских плат устроен примерно одинаково — это вкладки, в которых сгруппированы настройки по важности и категориям. Как правило, первая, она же главная вкладка, может содержать общую информацию о системе, какие-либо показания датчиков и несколько основных параметров, например, возможность изменить профиль XMP или включить режим автоматического разгона процессора. При первой настройке UEFI (BIOS) платы открывается именно в таком режиме, после чего пользователь может самостоятельно решить, что ему удобнее: упрощенное меню или подробный интерфейс. Мы рассмотрим оба варианта.
Здравый смысл, выведенный опытом и страхами перфекционистов, гласит, что любой современный процессор будет функционировать бесконечно долго и стабильно, если в нагрузке удержать его в пределах 70-80 градусов. Под нагрузкой мы понимаем несколько суток рендеринга фильма, продолжительную игровую баталию или сложные научные расчеты. Поэтому профиль работы СО необходимо строить, исходя из таких экстремумов — выбрать минимальные, средние и максимальные обороты вентиляторов таким образом, чтобы процессор в любом режиме оставался прохладным.

Чтобы добраться до настроек, необходимо войти в BIOS. Попасть в это меню можно, нажав определенную клавишу во время включения компьютера. Для разных материнских плат это могут быть разные команды: некоторые платы открывают BIOS через F2 или Del, а другие только через F12. После удачного входа в меню пользователя встретит UEFI, где можно сразу найти пункт для настройки вертушек. ASUS называет это QFan Control, остальные производители именуют пункт схожим образом, поэтому промахнуться не получится.

Компьютерные вентиляторы делятся на CPU FAN, Chassis FAN и AUX FAN. Первый тип предназначен для охлаждения процессора, второй обозначает корпусные вентиляторы, а третий оставлен производителем как сквозной порт для подключения дополнительных вентиляторов с выносными регуляторами. Он не управляет скоростью вертушек, а только подает питание и следит за оборотами. Для настройки оборотов подходят вентиляторы, подключенные как CPU FAN и CHA FAN.

Выбираем тот узел, который необходимо настроить, и проваливаемся в график.

В настройках уже есть несколько готовых профилей: бесшумный Silent, Standart — для обычных условий и Performance (Turbo) — для систем с упором в производительность. Конечно, ни один из представленных пресетов не позволит пользователю добиться максимальной эффективности.
Поэтому выбираем ручной режим (Manual, Custom) и обращаем внимание на линию.

График представляет собой систему координат, на которой можно построить кривую. В качестве опор, по которым строится линия, выступают точки на пересечении значений температуры и оборотов вентилятора (в процентах).
Чтобы задать алгоритм работы вентиляторов, необходимо подвигать эти точки в одном из направлений. Например, если сделать так, как показано на скриншоте ниже, то вентиляторы будут всегда работать на максимальных оборотах.

Если же сдвинуть их вниз, то система охлаждения будет функционировать со скоростью, минимально возможной для данного типа вентиляторов.

Если настройка касается вентилятора на CPU, то жертвовать производительностью СО ради пары децибел тишины не стоит. Лучше «нарисовать» плавный график, где за абсолютный минимум берут значение 30 градусов и минимальную скорость вентиляторов, а за абсолютный максимум — 75-80 градусов и 90-100% скорости вертушек. Этого будет достаточно даже для мощной системы.

В случае с корпусными вентиляторами такой метод может не подойти. Во-первых, «нос» каждого вентилятора можно настроить индивидуально на одну из частей системы: корпусные вертушки могут брать за точку отсчета как температуру чипсета, так и датчики на видеокарте, датчики в районе сокета и даже выносные, которые подключаются через специальный разъем. Настроить такое можно только в ручном режиме.

В таком случае придется работать без наглядного графика и представлять систему координат с точками в уме. Например:

Здесь настройка вентиляторов заключается не в перетаскивании точек на графике, а в ручной установке лимитов цифрами и процентами. Нужно понимать, что соотношение Min. Duty и Lower Temperature — это первая точка на графике, Middle — вторая, а Max — третья.
Один раз крутим, семь раз проверяем
После настройки необходимо проверить эффективность работы системы охлаждения. Для этого можно использовать любой софт для мониторинга. Например, HWInfo или AIDA64. При этом не забываем нагрузить систему какой-нибудь задачей: запустить бенчмарк, включить конвертацию видеоролика в 4К или поиграть 20-30 минут в требовательную ААА-игру.

Настройка системы охлаждения — это индивидуальный подбор параметров не только для конкретной сборки, но даже для разных вентиляторов. Ведь они отличаются не только радиусом и формой лопастей, но и предназначением — некоторые модели выдают максимальный воздушный поток, другие рассчитаны на высокое статическое давление. Поэтому не всегда одни и те же настройки будут одинаково эффективны в любой конфигурации.
Повышение максимальной скорости вращения вентиляторов влекло за собой рост уровня создаваемого ими шума. Известно, что при увеличении скорости вращения вентилятора от значения N1 до N2 уровень создаваемого им шума возрастает от значения NL1 до NL2, причем:
Предположим, требуется увеличить скорость вращения вентилятора на 10%. При этом на 2 дБ увеличится и уровень шума, создаваемого вентилятором. Зависимость изменения уровня шума вентилятора от нормализованной скорости вращения показана на рис. 1.
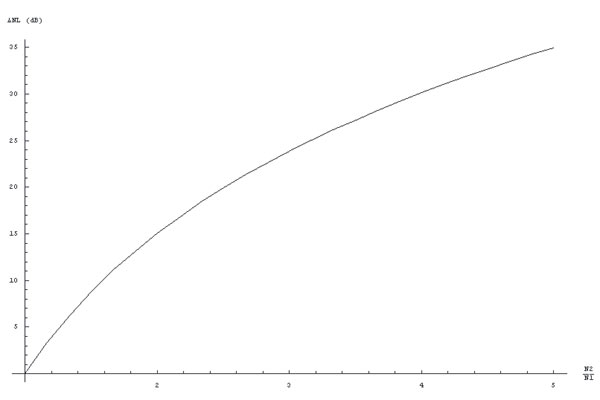
Рис. 1. Зависимость изменения уровня шума (DNL) вентилятора от нормализованной скорости вращения (N2/N1)
Существует два основных способа динамического управления скоростью вращения вентиляторов, реализуемых на современных материнских платах: управление по постоянному току и управление с использованием широтно-импульсной модуляции напряжения.
Управление по постоянному току
ри технологии управления по постоянному току (Direct Current, DC) меняется уровень постоянного напряжения, подаваемого на электромотор вентилятора. Диапазон изменения напряжения составляет от 6 до 12 В и зависит от конкретной материнской платы. Данная схема управления скоростью вращения вентилятора довольно проста: контроллер на материнской плате, анализируя текущее значение температуры процессора (через встроенный в процессор термодатчик), выставляет нужное значение напряжения питания вентилятора. До определенного значения температуры процессора напряжение питания минимально, и потому вентилятор вращается на минимальных оборотах и создает минимальный уровень шума. Как только температура процессора достигает некоторого порогового значения, напряжение питания вентилятора начинает динамически меняться, вплоть до максимального значения в зависимости от температуры. Соответственно меняются скорость вращения вентилятора и уровень создаваемого шума (рис. 2).

Рис. 2. Реализация динамического управления скоростью вращения вентилятора кулера процессора при изменении напряжения питания
Управление с использованием широтно-импульсной модуляции напряжения
льтернативной технологией динамического управления скоростью вращения вентилятора кулера процессора является широтно-импульсная модуляция (Pulse Wide Modulation, PWM) напряжения питания вентилятора. Идея здесь тоже проста: вместо изменения амплитуды напряжения питания вентилятора напряжение подают на вентилятор импульсами определенной длительности. Амплитуда импульсов напряжения и частота их следования неизменны, и меняется только их длительность, то есть фактически вентилятор периодически включают и выключают. Подобрав частоту следования импульсов и их длительность, можно управлять скоростью вращения вентилятора. Действительно, поскольку вентилятор обладает определенной инертностью, он не может мгновенно ни раскрутиться, ни остановиться (рис. 3).
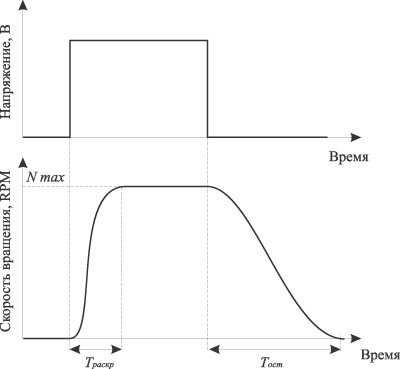
Рис. 3. Реакция вентилятора на импульс напряжения
Если длительность импульса напряжения (Ton) меньше характерного времени раскрутки вентилятора (Ton < Tраскр), а длительность промежутка времени, в течение которого на вентилятор не подается напряжение (Toff), меньше характерного времени останова вентилятора (Toff < Tост), то при подаче на вентилятор последовательности таких импульсов он будет вращаться с некоторой средней скоростью, значение которой определяется соотношением времен Ton и Toff (рис. 4).
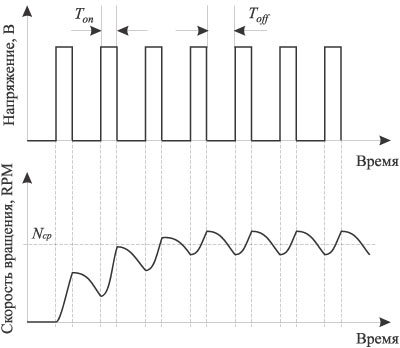
Рис. 4. Управление скоростью вращения вентилятора при широтно-импульсной модуляции напряжения
Отношение времени Ton к периоду следования импульсов (Ton + Toff), измеряемой в процентах, то есть
называется скважностью импульсов. Если, к примеру, скважность составляет 30%, то время, в течение которого на вентилятор подается напряжение, составляет 30% от периода импульса.
Реализации широтно-импульсной модуляции напряжения вентилятора осуществляется с помощью PWM-контроллера на материнской плате, причем данный тип управления поддерживается только материнскими платами для процессоров Intel.
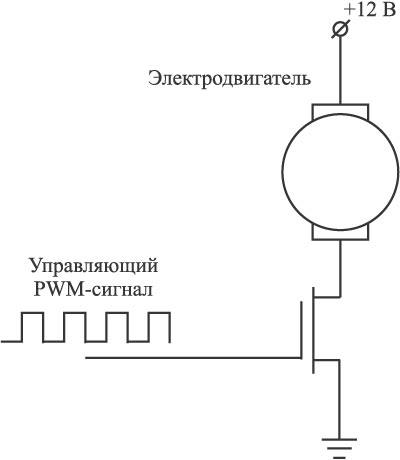
Рис. 5. Схема управления скоростью вращения вентилятора
при использовании PWM-сигнала
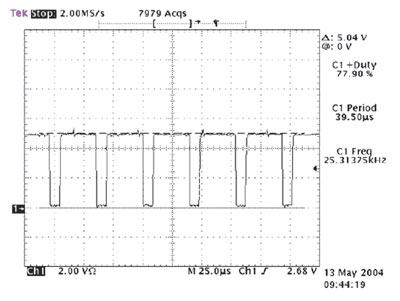
Рис. 6. Осциллограмма PWM-последовательности со скважностью 78% при частоте следования 25 кГц
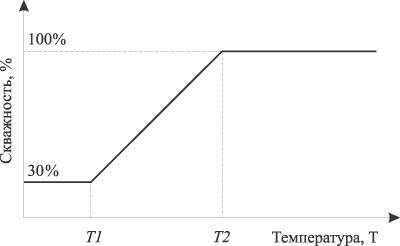
Рис. 7. Зависимость скважности PWM-импульсов
от температуры процессора
В заключение отметим, что, как и в случае с DC-технологией, для реализации PWM-управления скоростью вращения кулера необходимо активировать данный режим управления в BIOS материнской платы.
Читайте также: