
Как настроить драйвер шагового двигателя
Обновлено: 04.07.2024
Я его буду называть ниже просто “мотор”, для краткости.
Расскажу кратко, более подробно про него можно прочитать в википедии или тут.
Самый простой вариант:
Есть четыре электромагнитные катушки A, B, A’, B’. Если по ним пропускать ток — они становятся магнитами (катушки А и В активны при “прямом” направлении тока, A’ и B’ — при “обратном”).
Есть колесо с зубчиками (например, зубчик один — стрелка).
Зубчик притягивается к той катушке, по которой пропускают ток. Таким образом, если последовательно включать ток в катушках, то стрелка будет совершать вращательное движение.
Чтобы сделать это движение более плавным, можно добавлять зубчики, можно катушки, а можно и то и другое — принцип остаётся тот же, меняется только тяга и угол поворота за один вкл/выкл.
Обычно используется следующая конфигурация: катушки выстраиваются по четыре вдоль периметра вращения, на каждую четвёрку есть по зубцу, таким образом есть шестерёнка и много катушек вокруг неё.
Рассмотрим самую простую модель с четырьмя катушками и одним зубчиком.
Подумаем, какими способами можно вращать стрелку.
Допустим, начальное её положение — у B’.
1. Самое очевидное:
Включаем А: стрелка останавливается напротив А.
Выключаем А, включаем В: стрелка идёт к В и останавливает напротив.
Выключаем В, включаем A’: стрелка останавливает уже у A’.
Выключаем A’, включаем B’: стрелка идёт к B’ и останавливает напротив.
Выключаем B’, включаем А: стрелка останавливается напротив А. и т.д.
За каждый раз раз совершается вращение в 90 градусов, полный круг, соответственно, за четыре раза.
Быстро, но очень резко.
Чем плохо:
Резко, потому шумно.
Сразу большой угол поворота, поэтому в зависимости от груза инерция может быть большой, и разогнавшаяся стрелка не остановится сразу, поэтому нужна бОльшая задержка перед тем, как выключить текущую катушку и включить следующую.
Из-за проблемы выше, если скорость сделать слишком большой, можно потерять контроль над вращением, и у вас что-нибудь куда-нибудь улетит или движение станет совсем уж странным.
Чем хорошо: относительно просто реализуемо.
2. Чуть-чуть менее очевидное решение:
Включаем А и B’: стрелка останавливается между А и B’, ровно посередине.
Выключаем B’, включаем В: стрелка фиксируется между А и В.
Выключаем А, включаем A’: стрелка между В и A’.
Выключаем В, включаем B’: стрелка останавливается между A’ и B’.
Выключаем A’, включаем А: стрелка между B’ и А. И т.д.
За раз — те же 90 градусов, полный круг тоже за четыре раза.
Тоже резко.
Что плохо:
Все то же, что и в предыдущем методе
Плюс чуть-чуть сложнее в реализации, но не слишком.
Что хорошо:
Одновременно “в силе” сразу две катушки, то есть тяга гораздо лучше, чем у предыдущего метода.
Соответственно, порог скорость + инерция, после которого мы теряем управление, становится выше по сравнению с первым методом.
3. Измельчим шаги:
Пусть у нас для каждого мотора есть не только состояние вкл/выкл, а некая таблица состояний:
a)
0%
50%
100%
Здесь 50% означает, что сила тока в катушке 50% от максимальной.
Можно ещё мельче:
b)
0%
25%
50%
75%
100%
Или ещё мельче.
Тогда последовательность будет такой:
B’ 100%, А 0%
B’ 75%, А 25%
B’ 50%, А 50%
B’ 25%, А 75%
B’ 0%, А 100%
И то же самое для пар А-В, В-A’, A’-B’, B’-В
Что плохо:
Сложнее реализовать.
Что хорошо:
Шаг мельче, следовательно меньше шума и дребезжания, движение более плавное.
Меньше проблем с инерцией и потерей управления.
Можно сделать ещё мельче, и движение будет ещё плавнее.
4. Будем подавать ток аналоговым способом.
Так сказать предельный случай при увеличении частоты разбиения до бесконечности.
B’ плавно меняем от 100% до 0%, А от 0% до 100%, и так для всех пар А-В, В-A’, A’-B’, B’-В.
Чем хорошо:
Очень плавно, хороший контроль, хорошая тяга. И тишинааа.
Чем плохо:
Аналогово.
Запатентовано.
5. Используем следующий вариант:
Включаем B’ и А: стрелка между B’ и А.
Выключаем B’: стрелка у А.
Включаем В: стрелка между А и В.
Выключаем А: стрелка у В.
Включаем A’: стрелка между A’ и В.
Выключаем В: стрелка у A’.
Включаем B’: стрелка между B’ и A’.
Выключаем A’: стрелка у B’
Включаем А: стрелка между B’ и А.
И т.д.
Отличается от “0%,50%,100%” шага 3 только тягой. 5 — сильнее.
Методы 1, 2, 3, 5 — стандартные, у них даже есть обозначения.
Если считать положение “у катушки” за 1, а положение “между катушками” за 2, следующие обозначения станут понятными:
Режим 1 будет называться 1 phase (полношаговый) (стрелка останавливается только на фазе “1”), но он почти не используется — тяга нехороша и вообще.
Режим 2: 2 phase (полношаговый) (только на фазе “2”).
Режим 5: 1-2 phase (полушаговый) (останавливаемся и на “1” и на “2”).
Режим 3: В зависимости от частоты разбиения:
4 (Цикл от положения “перед катушкой” до “перед следующей катушкой” равен четырём шагам): 2W1-2 phase (2*2 = 4)
8: 4W1-2 phase (4*2 = 8)
По-русски микрошаговый.
Режим 3-а никак не называется, потому что не используется, а метод 4 — запатентован.

Таким образом, зависимость силы тока от времени на катушках А и В (A’ и B’ соответствуют отрицательным значениям силы тока) должна быть примерно такой (для случая 1-2 phase).
Можно, безусловно, подавать ток соответствующей силы в нужной последовательности прямо на мотор, а можно использовать чип, который сильно упрощает управление. Такой чип называют драйвером. Мы устанавливаем нужные настройки режимов (в регистры), постоянно подаём на драйвер сигнал таймера, и драйвер сам генерирует выход нужной конфигурации.
Нам нужно: сам драйвер (с мотором), таймер достаточной частоты и контролирующий девайс (процессор, микроконтроллер или fpga).
В общем случае, у драйвера есть пины, отвечающие за выставление режима, и управляющие пины.
Например, так:
Сам режим
Максимальная сила тока (от максимальной по спецификации).
Управляющие пины: таймер, направление вращения(по часовой стрелке, против часовой стрелки), пин сброса и пин enabled.
CW — clock-wise
CCW — counter clock-wise
Initial mode — заранее определённое состояние катушек, соответствующее “начальному”. Может быть разным для разных режимов. Например, 100% на А и 0% на В для 1-2 phase, 100% на А и -100% на В для 2 phase. Подержав мотор в этом режиме некоторое время, мы гарантируем, что мотор повёрнут определённым заранее известным образом. Можно начинать отсчёт с этого состояния (нам же нужно в каждый момент времени знать, на какой позиции находится мотор).
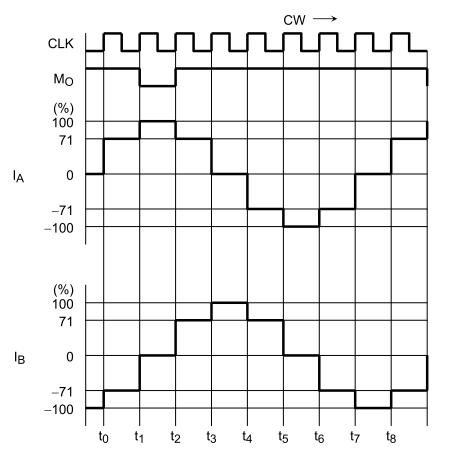
Наконец, мы имеем правильно выставленный режим (например, 1-2 phase) и работающий таймер. Тогда выход драйвера будет выглядеть следующим образом:
Для примера использовался драйвер от Тошиба TB6560AHQ/AFG, хотя подробности не сильно важны, так как цель статьи — рассказать именно общий принцип, не вдаваясь в детали.

Продолжаю сборку станка ЧПУ. Шаговые двигателя я уже подобрал. Для проверки электроники, собрал тестовое подключение на столе.
Сперва я подключил к CNC shield v3 шаговые двигателя:
- 17HS4401 - ток 1,7A
- EM-181 - ток 1,2A
- EM-142- значение максимального тока не нашел.
Двигателя выбраны сейчас нам нужно настроить рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
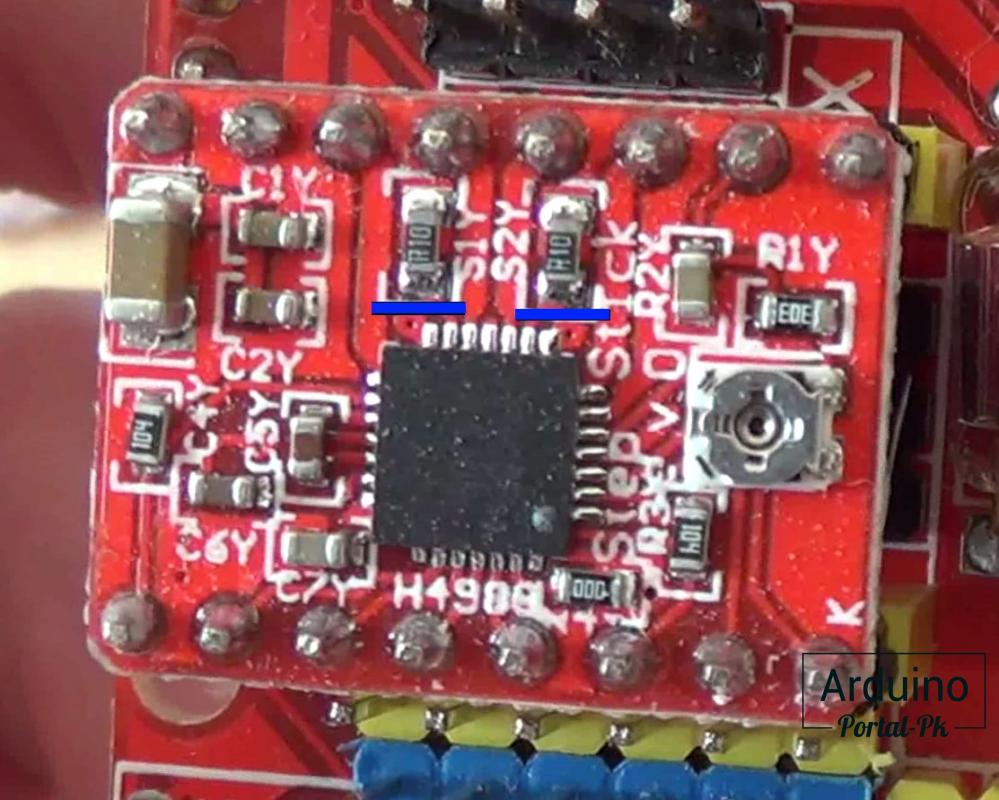
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Аналогично рассчитываю значения для EM-181
Vref = 1,2 * 8 * 0,100 = 0,96 В
Vrefист. = 0,96*0,7 = 0 ,672 В.
Так как я не смог найти datasheets для ЕМ-142. Для расчетов предложил, что ток на обмотку данного двигателя составляет 0,6 А. Если двигатель будит издавать гул сильнее обычного значит ток превышает максимальное значение. Его нужно понижать. Так как я взял ток обмотки. При расчете Vref ист. Не нужно умножать на 0,7, как я говорил выше ток одной обмотки составляет 70% от номинального. Расчет будет вот таким:
Vrefист. = 0,6 * 8 * 0,100 = 0,48 В.
По моим ощущениям я угадал с током двигателя ЕМ-142. Останется рассчитать сколько шагов он делает для совершения одного оборота. Об этом расскажу в следующей статье.
В видео подключил кнопки «Пауза», «Продолжить», «Аварийная остановка» . Подключил на пины шпинделя светодиод. И протестировал работу. Так же установил один конечный выключатель. Все работает. Если у вас возникли вопросу что куда подключается к CNC shield v3, читайте статью: Плата расширения для Arduino UNO, CNC shield v3 и драйверов A4988
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.

На форуме периодически всплывают вопросы о драйверах шаговых двигателей и их настройке. Решил разобраться с этим делом для себя, возможно кому-нибудь также пригодится.
Для начала разновидности двигателей Nema17.
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
Nema17BH 42BHM(42BYG) - в архиве: Nema17 - (описание и параметры разновидностей ШД)
(здесь важен ток двигателя, для дальнейших расчетов).
А4988
Встречаются варианты разного цвета.
Поэтому нужно обращать внимание не на цвет, а на микросхему драйвера.
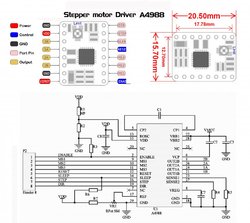
Схема и распиновка:
Назначение контактов драйвера A4988
ENABLE – включение/выключение драйвера
MS1, MS2, MS3 – контакты для установки микрошага
RESET - cброс микросхемы
STEP - генерация импульсов для движения двигателей (каждый импульс – шаг), можно регулировать скорость двигателя
DIR – установка направление вращения
VMOT – питание для двигателя (8 – 35 В)
GND – общий
2B, 2A, 1A, 1B – для подключения обмоток двигателя
VDD – питание микросхемы (3.5 –5В)
Значение микрошага устанавливается комбинацией сигналов на входах MS1, MS2, и MS3. Есть пять вариантов дробления шага.
MS1 MS1 MS1 Дробление шага
0 0 0 1
1 0 0 1/2
0 1 0 1/4
1 1 0 1/8
1 1 1 1/16
Для работы в режиме микрошага необходим слабый ток. На модуле A4988 поддерживает тока можно ограничить находящимся на плате потенциометром. Драйвер очень чувствителен к скачкам напряжения по питанию двигателя, поэтому производитель рекомендует устанавливать электролитический конденсатор большой емкости по питанию VMOT для сглаживания скачков. Внимание ! - Подключение или отключение шагового двигателя при включённом драйвере может вывести двигателя и драйвер из строя.
Настройка Vref для A4988
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов(Rs). Это два черных прямоугольника на плате драйвера. Обычно подписаны R050(номинал - 0.05 Ом) или R100 (номинал - 0.1 Ом).
Vref = Imax * 8 * (Rs)
Imax — ток двигателя;
Rs — сопротивление резистора. В моем случае Rs = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Исходя из этого, при длительной работе, на практике можно использовать коэффициент 0,6
Получается для Для 17HS4401, с током 1,7А Vref = 1,7 * 8 * 0,100*0,6=0,816 (0,82)
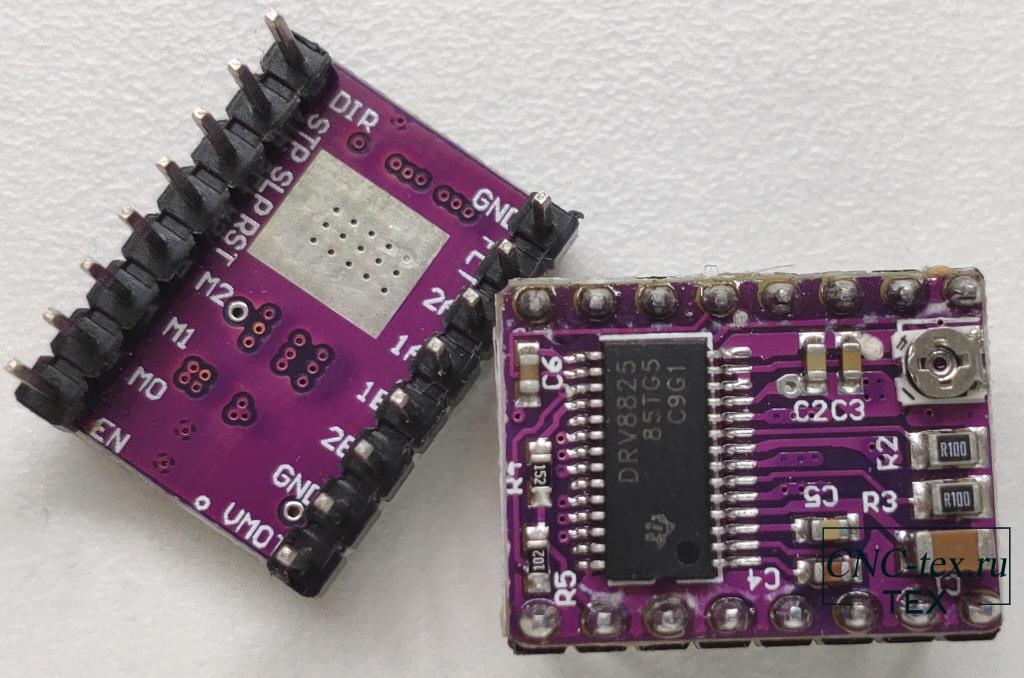
DRV8825
Плата создана на базе микросхемы компании TI (Texas Instruments Inc.) DRV8825 - биполярном шаговом драйвере двигателя. Расположение выводов и интерфейс модуля почти совпадает с драйвером шагового двигателя Pololu на микросхеме A4988, поэтому DRV8825 может стать высокопроизводительной заменой этой платы во многих приложениях.
Схема:
Характеристики:
шаг:1, 1/2, 1/4, 1/8, 1/16, 1/32.
Регулировка тока на обмотках двигателя, переменным резистором опорного напряжения.
Источника питания для двигателей от 8,2 В до 45 В.
Встроенный регулятор напряжения для логических цепей. Возможность подключения к логике как 3,3 В, так и 5 В.
Защита от перегрева (отключение при нагреве драйвера 150 градусов).
Защита по превышению тока обмоток.
Защита по пониженному напряжению.
Защита от короткого замыкания на землю.
При токе до 1,5 А на обмотку способен работать без радиаторов и дополнительного охлаждения.
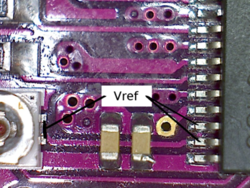
Регулировку тока двигателя следует производить выставив переменным резистором опорное наряжение (на выводах 12,13 микросхемы или на "среднем контакте резистора") из расчета 1 к 2, т.е 0,5В соответствует 1А, напряжению 1В соответствует 2А.
Обратите внимание, что переходное отверстие (золотистое) на плате, возле выводов 12,13 не является контактом для проверки опорного напряжения, это линия питания двигателей.
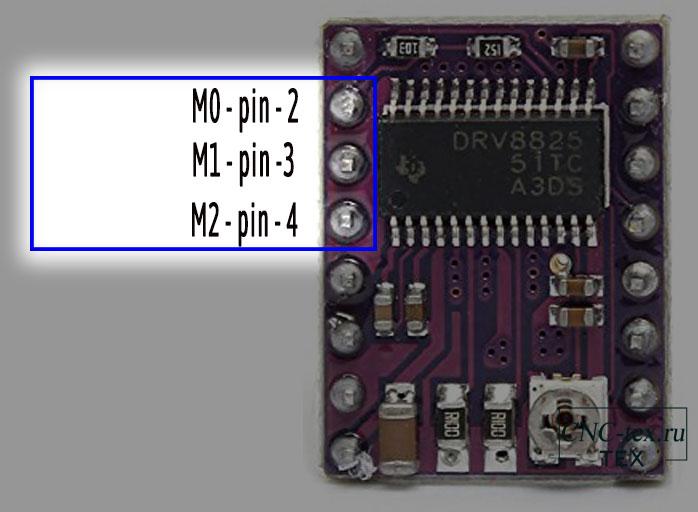
Режим микрошага устанавливается путем подачи "1" на контакты MODE0, MODE1, MODE2. (В случае установки драйвера на RAMPS это перемычки MS1, MS2, MS3)
M0 M1 M2 Режим микрошага
не стоит не стоит не стоит полный
стоит не стоит не стоит 1/2
не стоит стоит не стоит 1/4
стоит стоит не стоит 1/8
не стоит не стоит стоит 1/16
стоит не стоит стоит 1/32
не стоит стоит стоит 1/32
стоит стоит стоит 1/32
DRV8825 расчет Vref
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Детальное описание драйверов А4988 и DRV8825 в архиве А4988_DRV8825.rar
Встречалась информация ,что по умолчанию на драйверах DRV8825 выставлен максимальный ток, поэтому регулировка перед началом работы обязательна:
"По умолчанию у красных A4988 опора стоит в 0.8V это 1A ничего плохого не случится, но у DRV8825 опора выставлена в 1.6V -это максимальный ток, в теории 3.2А, по документации DRV8825 рассчитан максимум на 2.5A(2.2А с обдувом), это может повредить, как двигатель, так и драйвер."
В предыдущей статье уже рассмотрели самый распространённый драйвер шагового двигателя A4988. В данной статье рассмотрим еще одни, не менее популярный, драйвер шагового двигателя DRV8825 и подключим его к Arduino, а также научимся управлять шаговым двигателем. Не смотря на то, что драйвер шагового двигателя DRV8825 полностью взаимозаменяем с драйвером A4988, драйвер DRV8825 имеет ряд преимуществ: рабочее напряжение до 45В, ток до 2,5 А и деление микрошага до 1/32.
Технические характеристики драйвер DRV8825.
- Напряжение питания: от 8.2 до 45 В.
- Установка шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32.
- Напряжение логики: 3,3 В.
- Защита от перегрева: Есть.
- Максимальный ток на фазу: 1,5 А без радиатора, 2,5 А с радиатором.
- Габариты модуля: 20 мм х 15 мм х 10 мм.
- Габариты радиатора: 9 мм х 5 мм х 9 мм.
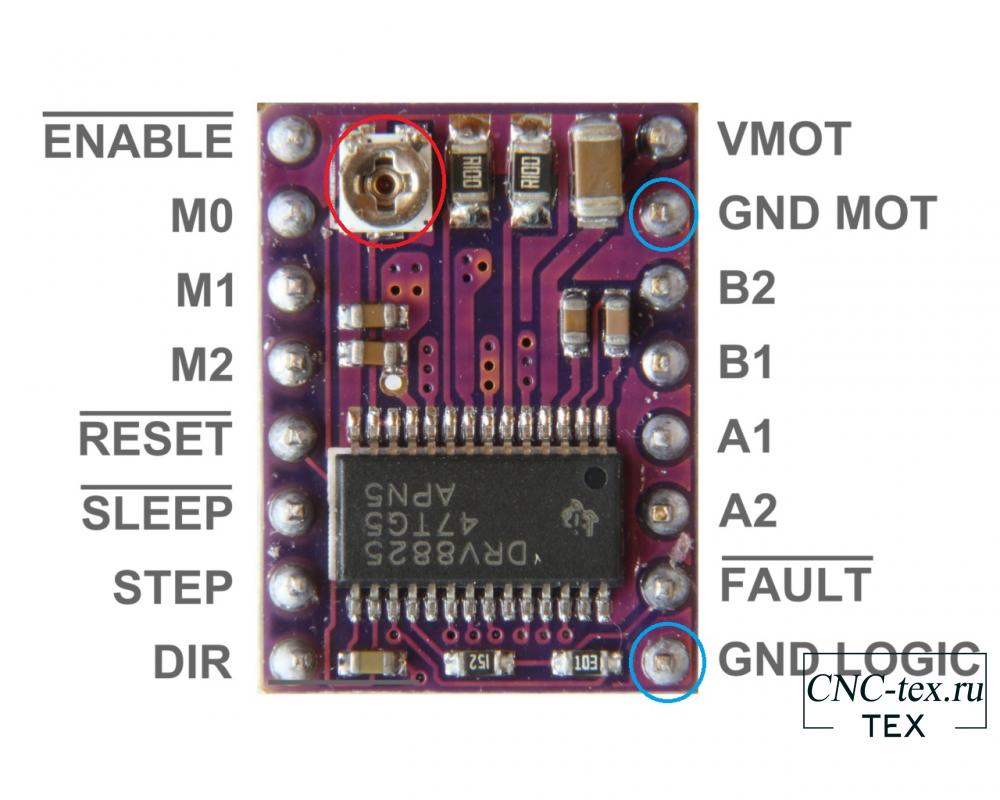
- EN — включение и выключение модуля (0 — включен, 5 В. — выключен).
- M0, M1 и M2— выбор режима микрошаг (смотрите таблицу ниже).
- RST — сброс драйвера.
- SLP — вывод включения спящего режима, если подтянуть его к низкому состоянию драйвер перейдет в спящий режим.
- STEP — управляющий вывод, при каждом положительном импульсе, двигатель делает шаг (в зависимости от настройки микрошага), чем быстрее импульсы, тем быстрее вращается двигатель.
- DIR — управляющий вывод, если подать +5 В. двигатель будет вращаться по часовой стрелке, а если подать 0 В. против часовой стрелки.
- VMOT&GND MOT — питание шагового двигателя от 8,2 до 45 В. (обязательное наличие конденсатора на 100 мкФ.).
- B2, B1, A1, и A2 — подключение обмоток двигателя.
- FAULT — Выход включения защиты, если состояние «0», значит, полевые транзисторы H-моста отключены в результате защиты от перегрузки по току, или был перегрев.
- GND LOGIC — заземление микроконтроллера.
Общая информация о драйвере DRV8825.
Основная микросхема модуля - это драйвер от TI (Texas Instruments Inc.) DRV8825, который способен управлять одним биполярным шаговым двигателем. Данный драйвер полностью взаимозаменяемый с драйвером A4988. Микросхема DRV8825 может работать с выходным напряжением до 45 В. и током до 1,5 на катушку без радиатора и до 2,5 А. с радиатором (дополнительным охлаждением). Так же, модуль имеет внутренний стабилизатор напряжения, который напитывает логическую часть модуля напряжением 3,3 В от источника шагового питания двигателя.
Драйвер позволяет использовать шесть вариантов шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32.
Распиновка драйвера DRV8825.
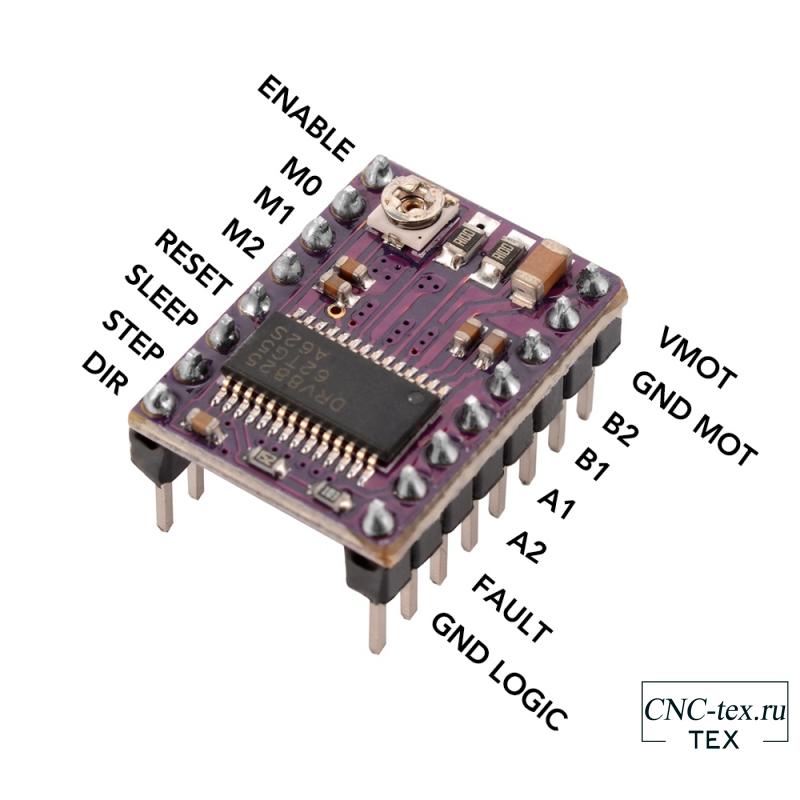
На драйвере DRV8825 расположено 16 контактов:
Подключение питания.
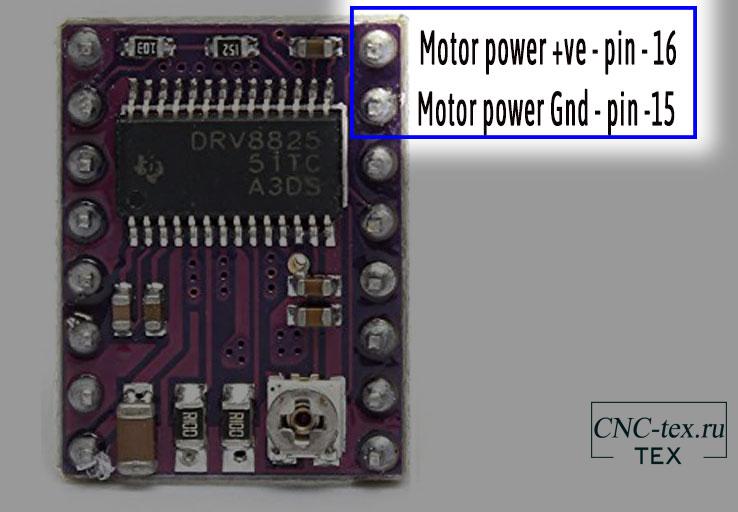
Модуль может питаться от источника постоянного тока до 45 В. и до 2,5 Ампер при 24 В. А при 45 В. номинального тока до 2,2 А. В общем случае напряжение может быть между 8 и 45 Вольт постоянного тока.
Пожалуйста, смотрите, что ваш блок питания рассчитан, по крайней мере, на 30% больше, чем максимальный ток, который может быть подан в ваш шаговый двигатель. Обратитесь к техническому паспорту производителя для того, чтобы узнать это значение.
Выводы для подключения шагового двигателя.
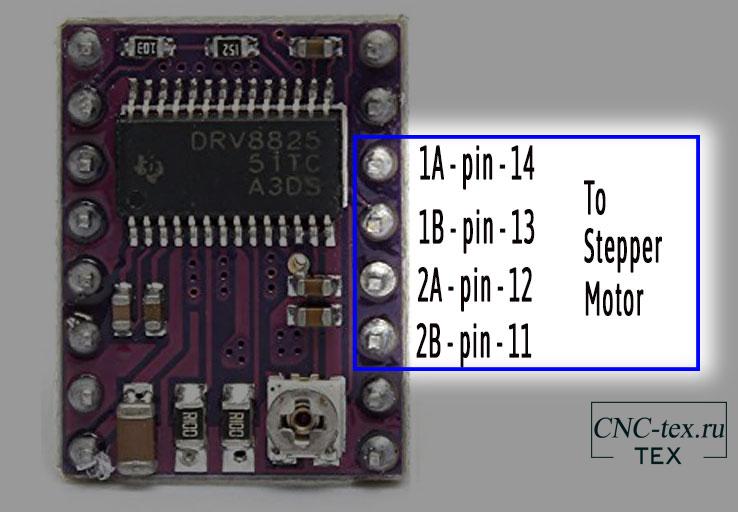
Выходные контакты: 1B, 1A, 2A ,2B.
Выводы управления.
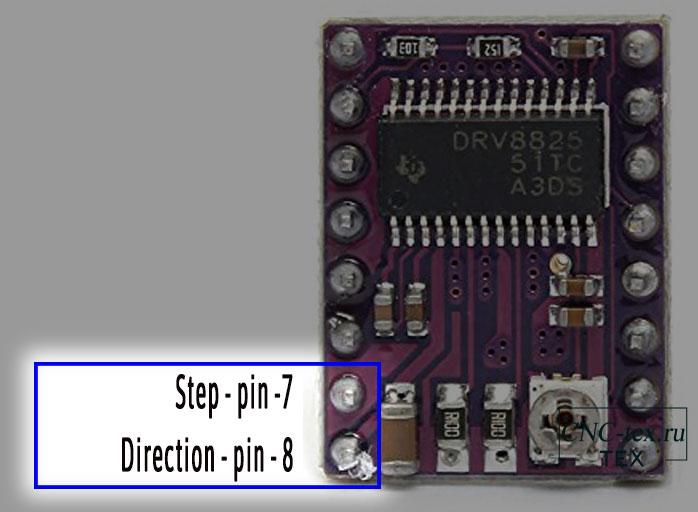
STEP — управляет микрошагом мотора. Каждый высокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращаться по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Настройка микрошага драйвера DRV8825.
Драйвер DRV8825 может работать в микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровнем. Например, если взять двигатель NEMA17 с шагом 1.8 градусов или 200 шагов на оборот, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот.
Дня настройки микрошага на драйвере DRV предусмотрены три выхода, а именно M0, M1 и M2. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.

Выводы M0, M1 и M2 в микросхеме DRV8825 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
Система охлаждения DRV8825.
При интенсивной работе микросхемы драйвер DRV8825 начинает сильно греться и если температура превысит предельное значение, то он может сгореть. По документации DRV8825 может работать с током до 2,5 А. на катушку, но на практике микросхема не греется, если ток не превышает 1,2 А. на катушку. Поэтому если ток выше 1,2 А. необходимо устанавливать радиатор охлаждения, который идет в комплекте.
Настройка тока DRV8825.
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя, и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
Current Limit — номинальный ток двигателя.
Для примера рассмотрим двигатель NEMA 17 17HS4401 с током 1,7 А.
Vref = 1,7 / 2 = 0,85 В.
Осталось только настроить, берем отвертку и вольтметр, плюсовый щуп вольтметра устанавливаем на потенциометр, а щуп заземления на вывод GND и выставляем нужное значение.
Подключение драйвера шагового двигателя DRV8825 к Arduino UNO.
Подключим двигатель DRV8825 к Arduino UNO по схеме.
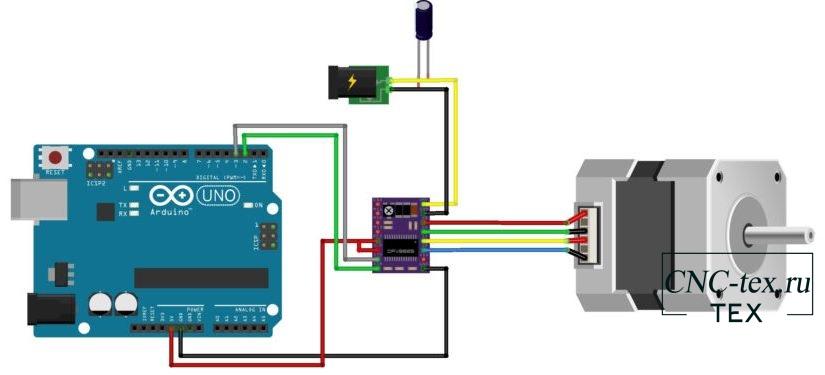
Для этого подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигателя к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. А контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ к контактам питания двигателя. В противном случае, при скачке напряжения модуль может выйти из строя.
Скетч вращения шагового двигателя NEMA 17, драйвер DRV8825.
Как уже было упомянуто выше, драйвер DRV8825 заменим драйвером A4988, поэтому и код вращения двигателем можно взять из предыдущей статьи: Драйвер шагового двигателя A4988. Но для увеличения кругозора сегодня будем использовать код вращения двигателя nema 17 без использования библиотеки.
Описание скетча:
Для работы данного скетча, не требуется никаких библиотек. Программа начинается с определения выводов Arduino, к которым подключены выводы STEP и DIR. Так же указываем stepsPerRevolution количество шагов на оборот.
В функции void setup() указываем управляющие контакты как выход.
В основной функции void loop(), вращаем двигатель по часовой стрелке, затем против, с разной скоростью.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
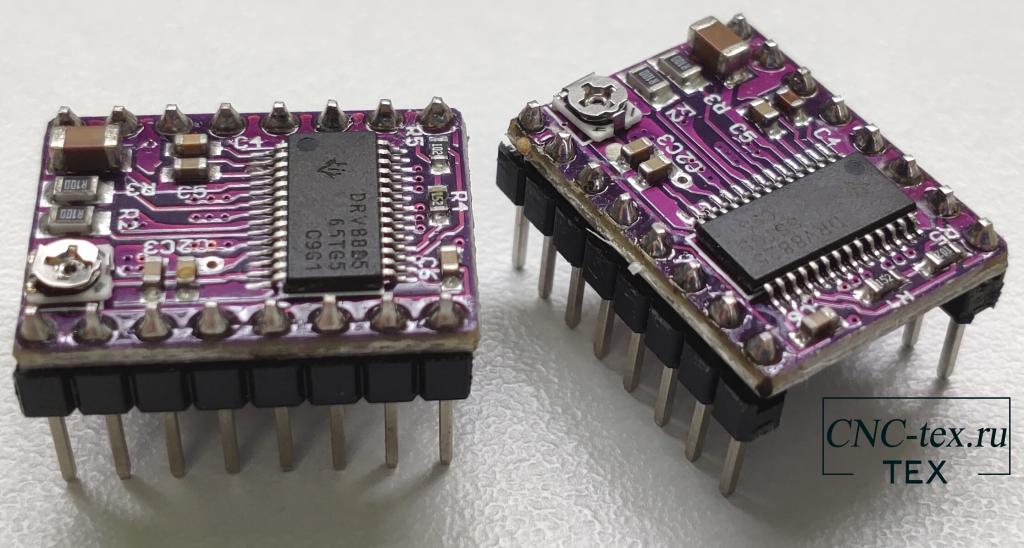
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.
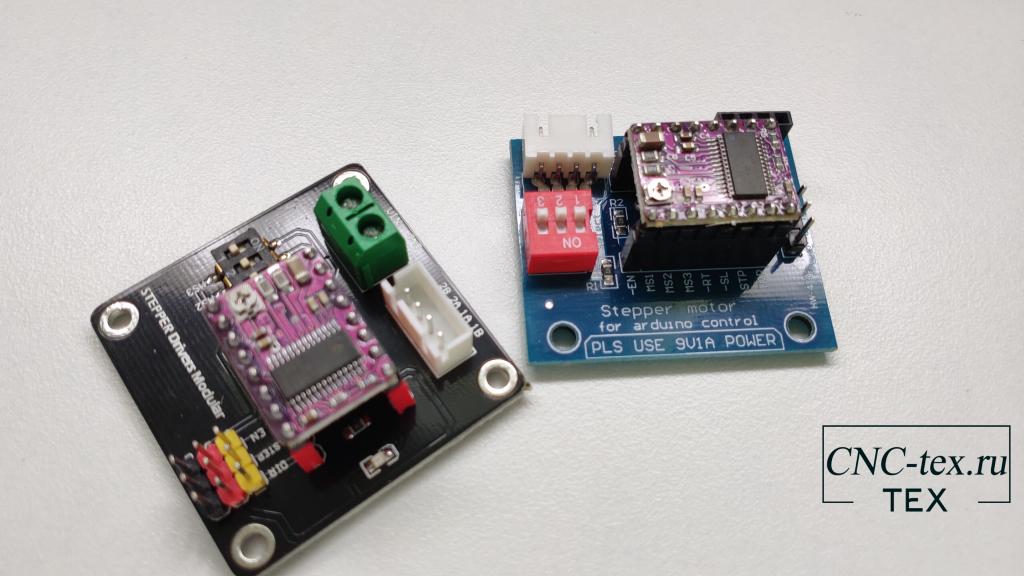
Распиновку и как подключать модуль драйвера DRV8825 будем рассматривать в следующей статье.
Использование драйвера DRV8825 с CNC shield v3.
Драйвер DRV8825 можно установить на CNC shield v3. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
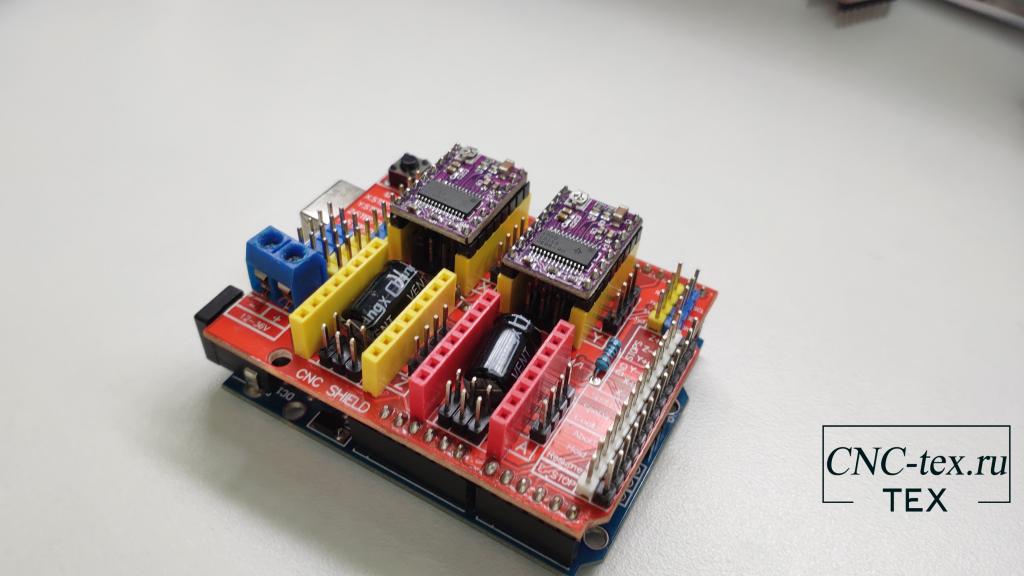
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки. Более подробно CNC shield v3 будем рассматривать в следующих статьях.
Вывод можно сделать следующий. Драйвер DRV8825 обладает рядом преимуществ перед драйвером A4988. А также, при использовании драйвера шагового двигателя DRV8825, меньше шума от шаговых двигателей. Это актуально при сборке лазерного гравера, 3D принтера. Когда при работе главный источник шума - это механика и гул шаговых двигателей.
Понравился статья Драйвер шагового двигателя DRV8825? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Читайте также: