
Какой драйвер лучше a4988 или
Обновлено: 04.07.2024
Привет, коты.
Обращаюсь к вам за советом - нужно подружить китайский шаговый двигатель с драйвером A4988
что имеется:
двигатель JUGETEK 42JT47-1684A (типоразмер Nema17 48мм) Алибаба - внешний вид и страничка даташита
Характеристики:
Rated Voltage: 2.8V
Current per Phase: 1.68A
Resistance per Phase: 1.65Ω ±10%
Holding Torque: 0.44 N.m Min.
Inductance/Phase: 42.8mH ±20%
A4988.pdf [1.04 MiB]
Скачиваний: 323
DIR не трогаю, на вход STEP идет меандр, двигатель делает 1 шаг вперед, 1 - назад. ССЫЛКА на видео
Если отключить двигатель, то сигналы на выходе драйвера - как в книжке.
С двигателем участки ШИМ на осциллограмме - это стабилизация тока.
REF напряжение стабилизации тока регулировал от 0.5В до 1В (для таких двигателей типично 0.7В), менялся только момент удержания.
что здесь не так ? как заставить двигатель вращаться ?
Хм. в даташите на полный шаг они ещё ресет дёргают "Home Microstep Position"._________________
[ Всё дело не столько в вашей глупости, сколько в моей гениальности ] [ Правильно заданный вопрос содержит в себе половину ответа ]
Могу не отвечать пару месяцев, не беспокойтесь.
JLCPCB, всего $2 за прототип печатной платы! Цвет - любой!
Reset Input. The RESET input sets the translator
to a predefined Home state (shown in Figures 9 through 13), and
turns off all of the FET outputs. All STEP inputs are ignored until
the RESET input is set to high.
При установленном RESET они игнорируют импульсы на входе STEP, и устанавливают выходы в положение, которое предопределено согласно картинок даташита 9..13
Для вращения его дергать не надо.
Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет
_________________
[ Всё дело не столько в вашей глупости, сколько в моей гениальности ] [ Правильно заданный вопрос содержит в себе половину ответа ]
Могу не отвечать пару месяцев, не беспокойтесь.
Приглашаем всех желающих 25/11/2021 г. принять участие в вебинаре, посвященном антеннам Molex. Готовые к использованию антенны Molex являются компактными, высокопроизводительными и доступны в различных форм-факторах для всех стандартных антенных протоколов и частот. На вебинаре будет проведен обзор готовых решений и перспектив развития продуктовой линейки. Разработчики смогут получить рекомендации по выбору антенны, работе с документацией и поддержкой, заказу образцов.
Посмотрел схему ардуиновского шилда, в который воткнут драйвер, там этот пин не используется вообще:Приглашаем 30 ноября всех желающих посетить вебинар о литиевых источниках тока Fanso (EVE). Вы узнаете об особенностях использования литиевых источников питания и о том, как на них влияют режим работы и условия эксплуатации. Мы расскажем, какие параметры важно учитывать при выборе литиевого ХИТ, рассмотрим «подводные камни», с которыми можно столкнуться при неправильном выборе, разберем, как правильно проводить тесты, чтобы убедиться в надежности конечного решения. Вы сможете задать вопросы представителям производителя, которые будут участвовать в вебинаре
Я тоже сильно сомневаюсь что в таком включении надо дёргать ресетом_________________
[ Всё дело не столько в вашей глупости, сколько в моей гениальности ] [ Правильно заданный вопрос содержит в себе половину ответа ]
Могу не отвечать пару месяцев, не беспокойтесь.

В предыдущей статье рассказывало о драйвере для биполярного шагового двигателя A4988, который часто используют в проектировании станков ЧПУ. В этой статье расскажу о другом драйвере DRV8825, который полностью взаимозаменяемый с драйвером A4988 и может работать с микрошагом до 1/32, напряжением до 45 В и током до 2.5 А.
Технические параметры
► Напряжения питания: от 8,2 до 45 В
► Установка шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32
► Напряжение логики: 3.3 В
► Защита от перегрева: Есть
► Максимальный ток на фазу: 1.5 А без радиатора, 2.5 А с радиатором.
► Габариты модуля: 20 мм х 15 мм х 10 мм
► Габариты радиатора: 9 мм х 5 мм х 9 мм
Общие сведения о драйвере DRV8825
Основная микросхема модуля это драйвер от TI (Texas Instruments Inc.) DRV8825, которая способна управлять одним биполярным шаговым двигателем. Как говорил ранее данный драйвер полностью взаимозаменяемый с драйвером A4988. Микросхема DRV8825 может работать с выходным напряжение до 45 В и током до 1.5 на катушку без радиатора и до 2.5 А с радиатором (дополнительным охлаждением). Так же, модуль имеет внутренний стабилизатор напряжение, который напитывает логическую часть модуля напряжение 3.3 В от источника шагового питания двигателя.
Драйвер позволяет использовать шесть вариантов шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32

Распиновка драйвера DRV8825:
На драйвере DRV8825 расположено 16 контактов, назначение каждого можно посмотреть ниже:

Настройка микрошага
Драйвер DRV8825 может работать микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровням. Например, если взять двигатель NEMA17 с шагом 1.8 или 200 оборотов, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот
Дня настройки микрошагов на драйвере DRV предусмотрены три выхода, а именно M0, M1 и M2. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.

Вывода M0, M1 и M2 в микросхеме DRV8825 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
Система охлаждения DRV8825
При интенсивной работе микросхемы DRV8825 начинает сильно греется и если температура превысит придельные значение, может сгореть. По документации DRV8825 может работать с током до 2.5 А на катушку, но на практике микросхема не греется если ток не превышает 1.2 А на катушку. Поэтому если ток выше 1.2 А необходимо устанавливать радиатор охлаждения, который идет в комплекте.

Настройка тока DRV8825
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
Vref = 1,7 / 2 = 0,85 В
Осталось только настроить, берем отвертку и вольтметр, плюсовой шуп вольтметра устанавливаем на потенциометр, а шуп заземления на вывод GND и выставляем нужное значение.

Подключение драйвера шагового двигателя DRV8825 к Arduino UNO
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер шагового двигателя DRV8825 x 1 шт.
► Шаговый двигатель 17HS4401 x 1 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Теперь, можно приступить к сборке схемы. Первым делом подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигатель к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. Так-же контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ, в противном случаи при скачке напряжение, модуль может выйти из строя.

Программа:
Теперь можно приступки к программной части и начать управлять шаговым двигателем с помощью драйвера DRV8825, загружайте данный скетч в Arduino.
В статье мы разберем режимы управления вращением шаговых двигателей. Подробно рассмотрим подключение драйвера A4988.
Шаговые моторы имеют три режима управления вращением: полношаговый, полушаговый и микрошаговый.
Во время полношагового режима шаговые моторы для поворота мотора на 360 градусов делают 200 шагов, во время полушагового - 400, а во время микрошагового возможно делить шаг на 4, 8 и даже 16 частей. Техника управления микрошаговым режимом сложна, поэтому многие производители станков ЧПУ (CNC) и качественных 3D принтеров стали изготавливать специальные контроллеры для управления шаговыми двигателями, часто называемых драйверами шаговых моторов. Ещё их называют StepStick.
Функционирование специальных контроллеров управления (драйверов шаговых двигателей) происходит следующим образом: вначале напряжение питания поступает на шаговый двигатель, затем на логическую часть драйвера шаговика, после этого задается направление вращения и команда (ШАГ) по управляющим контактам на двигателе. Во время команды (ШАГ) шаговый мотор получает необходимое напряжение, которого достаточно для передвижения ротора на один микрошаг (полушаг или шаг) – это зависит от предварительных установок, заданных заранее специальными перемычками на RAMPS 1.4.
Зачастую у продаваемых контроллеров шаговых двигателей (например: RAMPS 1.4) предустановлен режим микрошага 1/16. Чтобы регулировать подаваемое на шаговый мотор напряжение питания, на котроллере RAMPS 1.4 установлен специальный переменный резистор. Он является важным элементом, поскольку шаговики могут быть под 8V, 4V, 12V и д.р.
Для платы RAMPS 1.4 выпускают два вида драйверов A4988 и DVR8825. Они отличаются током, выдаваемым на шаговый двигатель и минимальным микрошагом.
И не только. Выпускаются несколько других драйверов шаговых двигателей, которые могут быть использованы в качестве альтернативы. Например, у драйвера шагового двигателя Pololu A4988 Black Edition производительность на 20% выше. Есть также большая версия драйвера на A4988, которая имеет защиту от обратной мощности на главном входе питания, а также встроенной 5 В и 3.3 В стабилизаторы напряжения, которые устраняют необходимость в покупке отдельного питания для логики и двигателей. Платы на DRV8825 предлагают на около 50% более высокую производительность в более широком диапазоне напряжений и с несколькими дополнительными функциями, в то время как платы на DRV8834 работают с двигателями с напряжением питания от 2.5 В. Любую из этих плат можно использовать в качестве драйвера во многих приложениях.
Рассмотрим драйвер A4988.
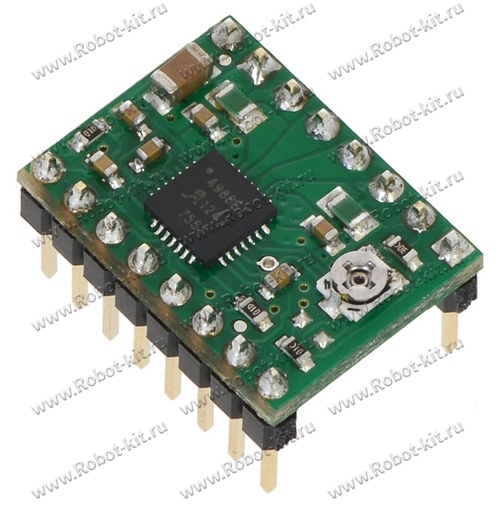
Характеристики драйвера A4988
- Максимальный ток 2 A
- Минимальный микрошаг 1/16 шага
Величина тока регулируется подстроечным резистором на драйвере. Вращение по часовой стрелке - повышение тока. Вращение против часовой стрелки - понижение величины тока.
Установка микрошага производится перемычками установленными на RAMPS 1.4
Схема драйвера A4988
Подключение драйвера A4988
Для работы с драйвером A4988 необходимо питание логического уровня (3 - 5.5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 - 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
При правильном подключении, через Pololu A4988 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями.
Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя.
Установка микрошага
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как A4988 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задаётся комбинациями переключателей на входах (MS1, MS2, и MS3). С их помощью можно выбрать пять различных шагов, в соответствии с таблицей ниже. На входы MS1 и MS3 переключателя установлены 100 кОм подтягивающие на землю резисторы, а на MS2 - 50 кОм, и если оставить их не подключёнными, двигатель будет работать в полношаговом режиме. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
Обычно для домашних 3D принтеров и станков ЧПУ используются драйверы A4988 с микрошагом 1/16. Для этого все перемычки на плате RAMPS 1.4 должны быть установлены на свои гнезда.
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIR. Обратите внимание, что выводы STEP и DIR не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений. Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
Ограничение тока
Для достижения высокой скорости шага, питания двигателя, как правило, гораздо выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Драйвер A4988 поддерживает активное ограничение тока, которое можно установить подстроечным потенциометром на плате.
Один из способов установить предельный ток - подключить драйвер в полношаговый режим и измерять ток, протекающий через одну обмотку двигателя без синхронизации по входу STEP. Измеренный ток будет равен 0,7 части предельного тока (так как обе обмотки всегда ограничиваются примерно на 70% от текущей настройки предельного тока в полношаговом режиме). Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе "ref" является функцией Vdd.
Еще один способ установить предельный ток – измерить напряжение на выводе "ref" и вычислить полученное ограничение тока (резисторы SENSE равны 0,05 Ом). Напряжение вывода доступно через металлизированное сквозное отверстие (в кружке на шёлкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Current Limit = VREF × 2,5
Например: опорное напряжение равно 0,3 В, предельный ток 0,75 А. Как упоминалось выше, в режиме полного шага, ток через катушки ограничен 70% от текущего предела, поэтому, чтобы получить полный шаг тока катушки в 1 А, текущий предел должен быть 1 A / 0,7 = 1,4 А, что соответствует VREF 1,4 A / 2,5 = 0,56 В. Смотрите спецификацию A4988 для получения дополнительных сведений.
Примечание: Ток обмотки может сильно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
Величину тока на драйвере шагового мотора настроить и опытным путём. Необходимо устроить прогон 3D принтера на высокой скорости по всем координатам. Оптимальным считается, когда шаговые двигатели уже не гудят и ещё не пропускают шаги.
Внимание: При регулировке тока подстроечным резистором на драйвере A4988. Вращение по часовой стрелке - повышение тока. Вращение против часовой стрелки - понижение величины тока.
Максимально допустимый ток подаваемый на обмотку, у микросхемы A4988 равен 2 A. Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
Внимание: плата драйвера может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами.
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).
В предыдущих статьях мы уже рассмотрели, что такое драйвер шагового двигателя, а также рассмотрели два драйвера: A4988 и DRV8825. Разобрали схему подключения данных драйверов к Arduino. Сегодня рассмотрим модуль для подключения драйверов A4988 и DRV8825, который поможет подключить драйвера A4988 и DRV8825 без использования дополнительных компонентов (например, макетной платы) и при использовании минимального набора проводов.
Как видно на фото ниже, адаптеры бывают разные по форме и по размеру. Также контакты подключения расположены по-разному. Но не пугайтесь, принцип работы данных модулей одинаковый.
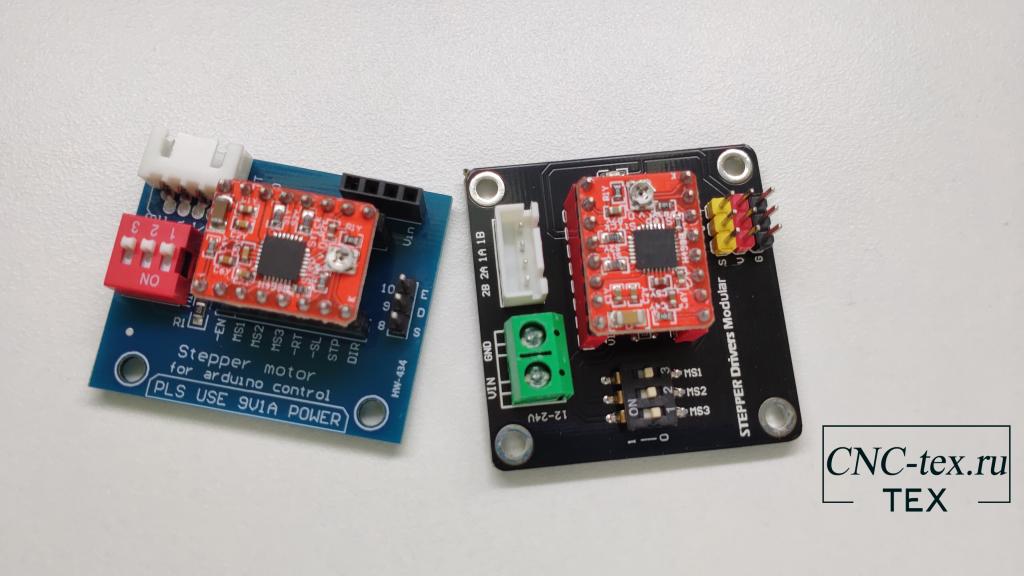
Кроме этого, если посмотреть внимательнее, то можно заметить, что все контакты подключения одинаковые, только расположены по-другому, и немного отличается схема подключения. Разобраться с подключением не составит труда. Чем и займемся.
Технические параметры
- Напряжение питания логики: 3.3 В — 5 В
- Напряжение питания ШД: до 30 В
- Габариты: 43 мм x 35 мм

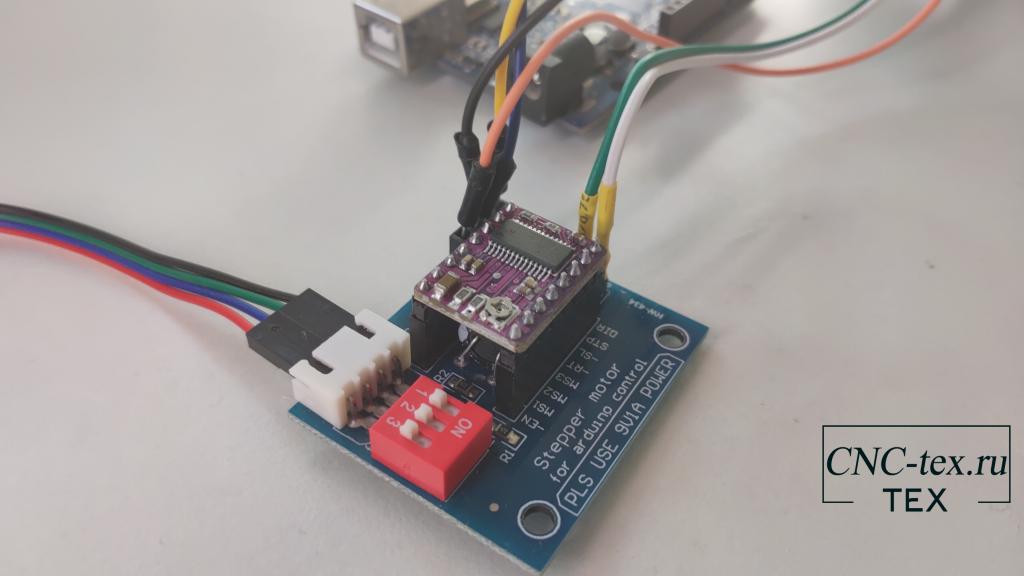
Рассмотрим пример подключения модуля синего цвета с надписью «Stepper motor for arduino control». Данный модуль бывает и красного цвета, так что не пугайтесь.
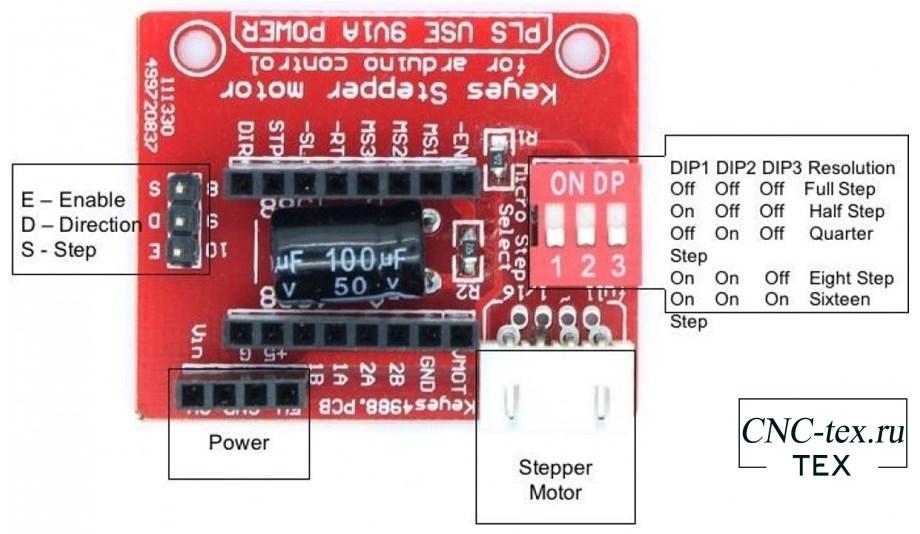
Кратко про модуль подключения драйверов A4988 и DRV8825.
Модуль имеет небольшие размеры, всего 43 мм на 35 мм. Для установки драйверов A4988 и DRV8825 предусмотрено два ряда гнезд с 8 контактами и шагом 2.54 мм, в центре расположен электролитический конденсатор, необходимый для защиты драйвера. Далее на адаптере расположены три разъема, первый необходим для подключения шагового двигателя, второй разъем питания и третий разъем управления. Так же, предусмотрены dip переключатели для установки микрошага (таблицу настроек можно посмотреть в статьях A4988 и DRV8825). Вывод включения драйвера EN всегда подтянут к земле через резистор 4.7 кОм.
Перед подключением необходимо настроить ток драйвера в соответствии с током шагового двигателя, который вы будете подключать. Как рассчитать ток для драйвера A4988 читайте тут, для драйвера DRV8825 читайте тут. Также при необходимости установите радиатор для охлаждения драйвера.
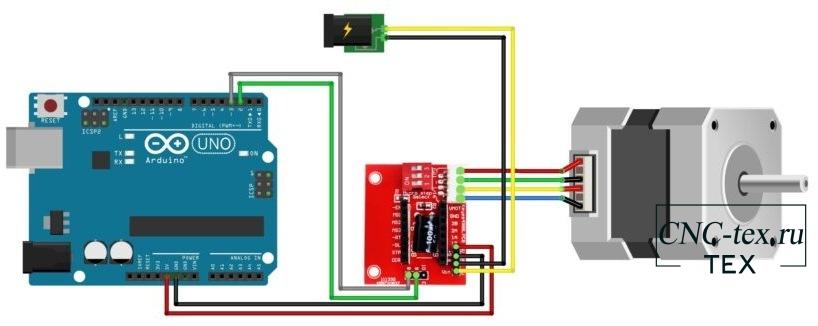
Подключение модуля драйверов A4988 и DRV8825 к Arduino.
Первым делом устанавливаем драйвер A4988 (DRV8825) в гнездо согласно распиновке, далее подключаем шаговый двигатель NEMA17. В примере не буду использовать вывод EN, подключаем STEP к выводу 3 на Arduino и DIR к выводу 2 на Arduino. Осталось подключить питание, 5В к выводу 5V на Arduino и 9V к источнику питания, в моем случае 12В, не забываем объединить землю.
Схема подключения модуля драйверов A4988 и DRV8825 к Arduino.
Устанавливать драйвер на модуль нужно правильно, согласно маркировке ножек драйвера и колодки подключения на модуле драйверов A4988 и DRV8825. В противном случае, драйвер может выйти из строя.
Скетч вращения шагового двигателя NEMA 17, драйвер A4988, DRV8825.
Код можно взять из статей про драйвера A4988, DRV8825.
Код вращения шагового двигателя NEMA 17, драйвер A4988, DRV8825 без использования библиотеки.
Код вращения шагового двигателя NEMA 17, драйвер A4988, DRV8825 с использованием библиотеки AccelStepper.
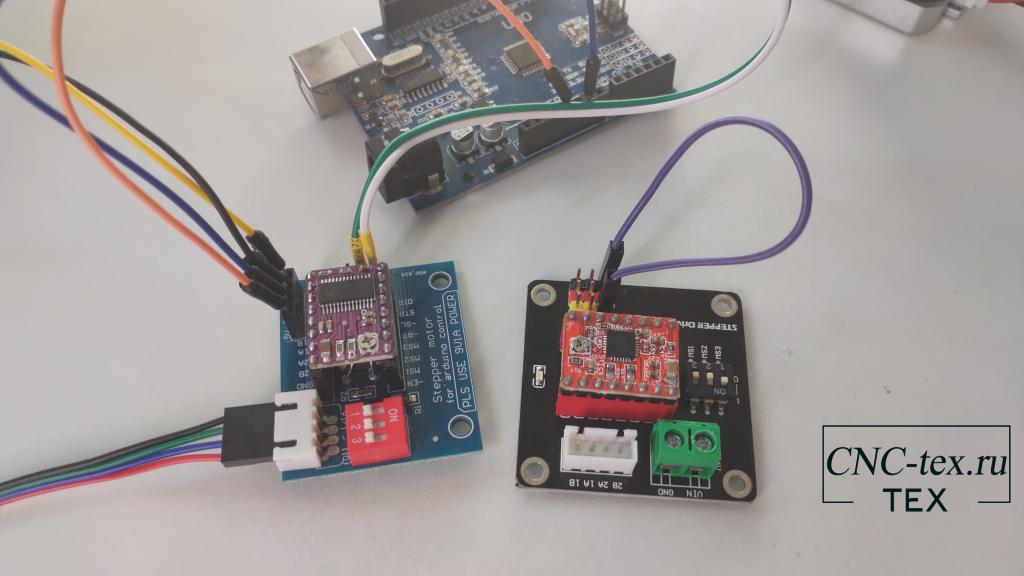
Подключение Модуля драйвера A4988 и DRV8825 черного цвета.
Итак, мы рассмотрели, как подключить один модуль для подключения драйвера A4988 и DRV8825, на котором написано«Stepper motor for arduino control». Давайте рассмотрим второй модуль черного цвета с надписью «Stepper Drivers Modular».
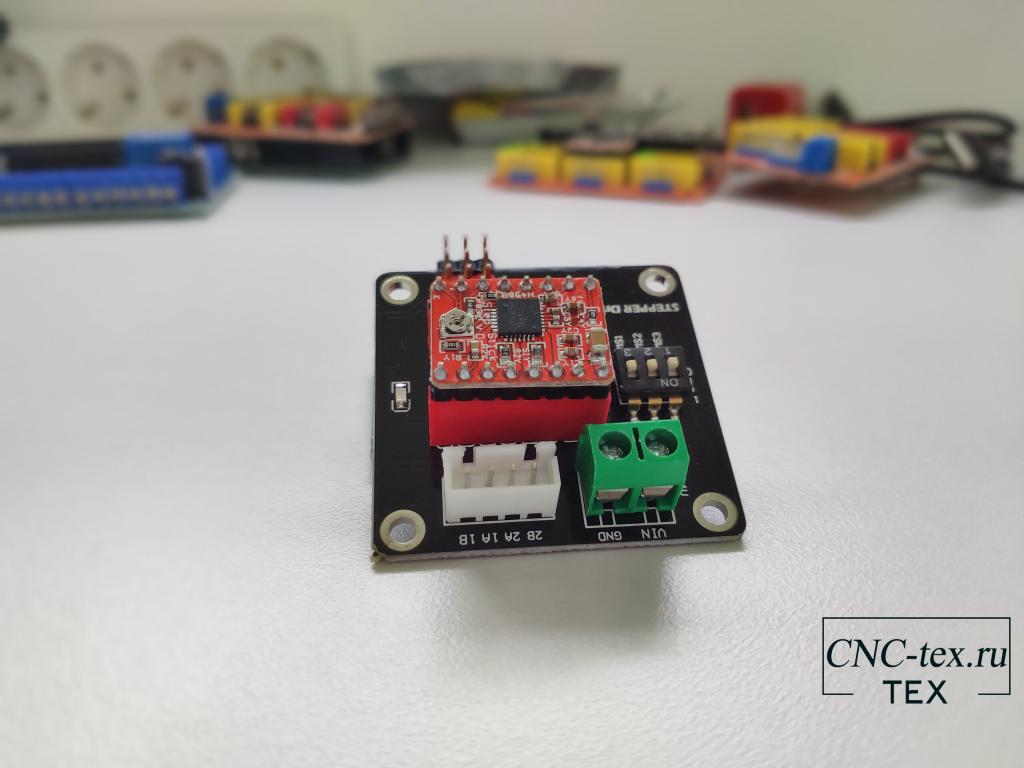
Подключение практически идентичное первому модулю, только нужно обязательно подключить вывод включения драйвера EN к земле. Иначе работать двигатель не будет.
Подробнее подключение Модуля драйвера A4988 и DRV8825 черного цвета смотрите на фото ниже. Больше фото внизу статьи в разделе «Фотографии к статье».
Понравился статья Модуль для подключения драйверов A4988 и DRV8825 ? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Читайте также: