
Ccpm servo consistency master подключение к hdd
Обновлено: 04.07.2024
(1) Выход: 15 мА (5,0)
(3) Выходной сигнал: 1,5 мс 0,5 мс
(4) Размер: 46*32*17 мм
(6) Регулировка: Ручная, автоматическая и средняя.
Характеристики: Возможность легкого обнаружения и настройки виртуальных пространств сервера, дрожания и медианы.
Может быть подключен к двум сервоприводам или ESC; MCU контроль, хорошая стабильность и высокая точность. Поверните ручку, рулевое управление может быть обнаружено.
Если вы Подключите электронный регулятор (щетка или безщеточный), вы можете избавиться от устройств дистанционного управления для ручного контроля скорости, используется для проверки тона
Скорость или производительность двигателя очень практичные, больше не громоздкие для подключения пульта и приемника. Это эквивалентно руке
Функция подвижного приемника, аналоговый передатчик, чтобы играть через ручку руля
Инструкции: См. Картинку ниже, Затем левое рулевое управление, разделенное на нижние три группы, к которым можно получить доступ три сервопривода; правый одиночный ряд контактов, подключенных к источнику питания, близко к краю отрицательный (чтобы увидеть символ идентификации), затем отрицательный аккумулятор, будьте осторожны, не Переворачивайте, Если источник питания перевернут, будет гореть IC; S идентификаторы, соответствующие контакту, это не имеет значения. Включение, синий свет будет освещаться одновременно, а затем только свет слева от первого, чтобы вручную настроить тест потенциометров, нажмите кнопку, средние огни, нормированный тест; третье освещение, автоматическое тестирование. ESC тестовое соединение и доступ к сервисам, так как вы должны сначала принять тестовый двигатель ESC!
Примечание: Этот тестер не может проверить сервопривод более 55 граммов
Հարգելի գնորդներ, 10.000 դրամ և ավելի գնումներ կատարելու դեպքում` Երևանի տարածքում և շրջակա բնակավայրերում առաքումը կկատարվի անվճար: Մինչև 10.000 դրամ արժողությոմբ գնումները կառաքվեն 500-1.500 դրամով (կախված ապրանքներից և Ձեր գտնվելու վայրից) : Մարզերում հնարավոր է փոստային առաքում:
Ցանկացած ապրանքի վերաբերյալ կարող եք ստանալ անվճար խորհարդատվություն (Խորհրդատվություն ստանալու համար ապրանքը գնելը պարտադիր չէ) :
Arduino Iot automat avtomatika wifi ESP BLE Bluetooth smart home sensor hardware/software development internet of things USB I2C SPI TTL
Առդուինո ավտոմատ էլեկտրոնիկա ծրագրավորում սմարթ արդուինո
Ардуино автоматика смарт дом управление электроника программирование схемотехника искусственный интеллект дистанционное управление датчик разработка
Познакомимся поближе с сервоприводами. Рассмотрим их разновидности, предназначение, подсказки по подключению и управлению.

Что такое сервопривод?
Сервопривод — это мотор с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервомотором является любой тип механического привода, имеющий в составе датчик положения и плату управления.
Простыми словами, сервопривод — это механизм с электромотором, который может поворачиваться в заданный угол и удерживать текущее положение.
Элементы сервопривода
Рассмотрим составные части сервопривода.

Электромотор с редуктором
За преобразование электричества в механический поворот в сервоприводе отвечает электромотор. В асинхронных сервоприводах установлен коллекторный мотор, а в синхронных — бесколлекторный.
Однако зачастую скорость вращения мотора слишком большая для практического использования, а крутящий момент — наоборот слишком слабый. Для решения двух проблем используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, вращается выходной вал — конечная шестерня редуктора, к которой можно прикрепить нечто, чем мы хотим управлять.
Позиционер
Для контроля положения вала, на сервоприводе установлен датчик обратной связи, например потенциометр или энкодер. Позиционер преобразует угол поворота вала обратно в электрический сигнал.
Плата управления
За всю обработку данных в сервоприводе отвечает плата управления, которая сравнивает внешнее значения с микроконтроллера со показателем датчика обратной связи, и по результату соответственно включает или выключает мотор.
Выходной вал

Вал — это часть редуктора, которая выведена за пределы корпуса мотора и непосредственно приводиться в движение при подаче управляющих сигналов на сервопривод. В комплектации сервомоторов идут качельки разных формфакторов, которые одеваются на вал сервопривода для дальнейшей коммуникации с вашими задумками. Не рекомендуем прилагать к валу нагрузки, которые больше крутящего момента сервопривода. Это может привести к разрушению редуктора.
Выходной шлейф
Для работы сервопривода его необходимо подключить к источнику питания и к управляющей плате. Для коммуникации от сервопривода выходит шлейф из трёх проводов:
Красный — питание сервомотора. Подключите к плюсовому контакту источнику питания. Значения напряжение смотрите в характеристиках конкретно вашего сервопривода. Чёрный — земля. Подключите к минусовому контакту источника питания и земле микроконтроллера. Жёлтый — управляющий сигнал. Подключите к цифровому пину микроконтроллера.Если сервопривод питается напряжением от 5 вольт и потребляет ток менее 500 мА, то есть возможность обойтись без внешнего источника питания и подключить провод питания сервомотора непосредственно к питанию микроконтроллера.
Управление сервоприводом
Алгоритм работы
Сервопривод получает на вход управляющие импульсы, которые содержат: Для сервоприводов постоянного вращения: значения скорости и направления вращения. Плата управления сравнивает это значение с показанием на датчике обратной связи. На основе результата сравнения привод производит некоторое действие: например, поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра.Интерфейс управления
Чтобы указать сервоприводу желаемое состояние, по сигнальному проводу необходимо посылать управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал от микроконтроллера поступает в управляющую схему сервопривода, имеющийся в нём генератор импульсов производит свой импульс, длительность которого определяется через датчик обратной связи. Далее схема сравнивает длительность двух импульсов:
Если длительность разная, включается электромотор с направлением вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.Для управления хобби-сервоприводами подают импульсы с частотой 50 Гц, т.е. период равен 20 мс:
1540 мкс означает, что сервопривод должен занять среднее положение.Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
Часто способ управления сервоприводами называют PWM (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation) в котором важна длина импульсов, а не частота.
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.

Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.

Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
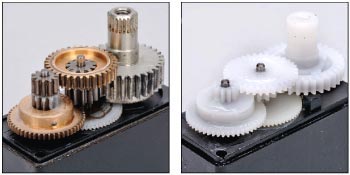
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
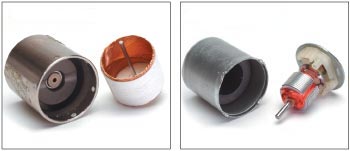
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
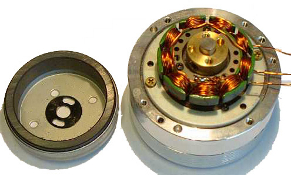
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2 . Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту 5V или напрямую к источнику питания жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo .
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.

Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
По аналогии подключим 2 сервопривода
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
Примеры работы с Espruino
Примеры работы с Raspberry Pi
Вывод
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
Начинающему пилоту, который впервые столкнулся с необходимостью самостоятельно настраивать CCPM автомат перекоса, довольно часто доводится ломать голову над тем, как же сделать так, чтобы все эти серво работали в верном направлении? Наличие опыта по настройке автоматов с классической схемой (на каждую из функций крена, тангажа и шага по одной серво) очень часто еще больше запутывает. Проходит 10… 20… 40 минут, а настроить все как надо, так и не получается, постоянно что-нибудь работает не в ту сторону. Тогда как же это нужно делать правильно на современном радио?
На данное время в автоматах перекоса существует несколько разных схем по установке серво. Самыми популярными являются две следующие схемы: одна из них - классическая (когда на крен, тангаж и угол приходится по одной серво), другая - на сегодняшний день наиболее распространенная схема - 120° CCPM. Вот последнюю мы и рассмотрим в данной статье.
Суть данной схемы заключается в том, что все три серво равномерно распределяются по окружности тарелки автомата перекоса и работают синхронизовано друг с другом, управляясь микшерами передатчика.
Функция PITCH (работа с коллективным шагом) при увеличении ведет к равномерному перемещению вверх одновременно всех трех точек, таким образом, поднимая всю тарелку.
Функция AILERON (работа с креном) оставляет среднюю серво в неподвижном состоянии, а две крайних работают в противофазе, тем самим, наклоняя тарелку в необходимую сторону.
Функция ELEVATOR (работа с тангажем) принуждает среднюю серво тянуть тарелку, например, вниз, а две крайних серво - одновременно поднимать вверх. И наоборот.
Далее в этой статье мы рассмотрим следующие понятия: канал управления (непосредственно связан с конкретной серво) и функция управления (коллективный и циклический шаги по крену и тангажу). Функция отличается от канала тем, что при изменении ее значения (перемещение ручки) одновременно работают несколько серво (имеется в виду то, что значения меняются сразу в нескольких каналах). Именно, этим преобразованием и является функция CCPM микширования, которая заложена в аппаратуру.
К пребольшому везению, разработчиками аппаратуры уже были произведены все необходимые расчеты, и теперь уже каждому известно насколько надо передвигать каждое серво для того, чтобы получить желанный эффект. Но поскольку все конструкции и серво автоматов различные между собой, то придумать некий единый и стандартный вариант реверсов просто невозможно. Именно это и необходимо настраивать.
Дальше при описании мы будем использовать значения номеров каналов, которые применяются в аппаратуре Spektrum/JR. Для обладателей иных аппаратур все останется абсолютно таким же, исключая названия режимов и номера каналов, к которым нужно подключать серво. В данном случае принципиальным является то, как подключаются серво. Очень важно точно определить именно тот канал, куда необходимо подключить серво, которое располагается в центе. Например, на радио Spektrum/JR этим каналом будет Ch3 - ELEV.
Настройка реверсов серво
Первым делом, что следует сделать, так это выбрать режим 3 servo/120° CCPM в настройках типа автомата перекоса. Совершается эта операция в меню SWASH TYPE. После чего, все подсоединенные серво при передвижении ручкой коллективного шага вверх-вниз должны работать синхронно. Также, передвигая ручки крена (AILE) приводятся в действие две боковые серво, а при передвижении ручкой тангажа (ELEV) - все три, но смещение боковых серво в два раза меньше по своей величине, чем смещение третьей (определяется это при помощи элементарной геометрии, поскольку sin (30°) = 0.5). Тем не менее, высока вероятность того, что направления работы серво предположительно могут быть совершенно произвольными.
Пожалуй, не помешает напомнить, как же именно должна работать на большинстве вертолетов тарелка автомата перекоса. Обычно, при увеличении коллективного шага (на радио с Mode 2 левой ручкой вверх) тарелка должна подниматься. При задании крена влево (на радио с Mode 2 правой ручкой влево) тарелка должно наклоняться влево (если смотреть со стороны хвоста). При задании тангажа вперед (на радио с Mode 2 правой ручкой вперед) тарелка должна наклоняться вперед. Так вот, направление движения тарелки автомата перекоса обязано полностью соответствовать поведению модели, которое вы от нее ожидаете.
Теперь рассмотрим, какими же именно мы располагаем возможностями настройки реверсов. Итак, у нас имеется три переключателя реверсов по одному на каждую из трех серво. Под "переключателями", имеется в виду то, что есть возможность изменить направление работы каждой из серво. Но на обыкновенных радио это действительно могут быть переключатели. А вот на компьютерных радио типа DX7 изменение направления осуществляется с помощью меню REVERSING SW.
Так вот, для этих трех переключателей существует всего 4 вероятных комбинации. Одна из них - это выключены все, следующая - включен только Ch2, еще одна - включен только Ch3, и последняя - включен только Ch6. По правде говоря, существует не 4, а 8 комбинаций, но рассматривать этих 4 остальных нет смысла, поскольку они представляют собой зеркальное отражение первых 4-х.
Ниже приведена таблица того, как при работе по трем осям должна работать каждая из серво автомата перекоса:
Направления стрелок в данном случае условны. Не имеет значения, куда у вас передвигается серво вверх или вниз. Важно лишь то, работает ли серво в аналогичном или же в противоположном направлении по отношению к другим серво в группе.
Наше задание – это добиться такого эффекта, чтобы при изменении коллективного шага все три серво работали в одном направлении. Как правило, для достижения этого будет достаточно переключить всего лишь один из трех имеющихся реверсов. Тем не менее, можно также добиться того, чтобы тарелка поднималась конкретно вверх при увеличении коллективного шага, если Вам так будет удобнее. Это вовсе не принципиально в компьютерном радио, но для более обычных моделей аппаратуры это может сыграть важную роль, о чем мы и поговорим ниже.
К большому счастью, разработчиками аппаратуры все остальное уже было предусмотрено, и при верном направлении всех трех серво для коллективного шага все прочие строчки таблицы будут выстроены автоматически.
На данном этапе настройка автомата перекоса со стандартной схемой была бы завершена. Но в случае же с CCPM, по видимому, это еще не конец. Есть большая вероятность того, что можно добиться правильной роботы одной или двух функций, при работе третьей в обратную сторону. Например, если коллективный шаг работает верно (при движении ручки от себя - тарелка перемещается вверх), то функция крена (AILE) в это время работает противоположным образом: при движении ручки вправо - тарелка перемещается влево. И как же быть теперь, ведь переключателей реверсов у нас больше не осталось?
Настройка реверсов функций
Решение этого вопроса скрывается в еще одном пункте меню настроек конфигурации CCPM автомата перекоса, который называется SWASH MIX.
В данном меню величина коэффициента микширования устанавливается для каждой из трех функций отдельно. На аппаратуре JR его значение установлено +60% по умолчанию, на любой другой аппаратуре оно может быть +50%. Если в инструкции к Вашей модели вертолета имеются некие указания по настройке SWASH MIX, то следует установить ети рекомендуемые значения (вот скажем, для Hurricane 550 рекомендовано 50%). В том случае если никаких указаний нет, то следует пока оставить значения, установленные по умолчанию до того момента, пока Вы сами для себя сможете уяснить, что собственно необходимо поменять.
Для большинства начинающих моделистов кажется неясным тот факт, что данные коэффициенты могут иметь не только положительное, но также и отрицательное значение. Изменение знака, по своей сути, и является в целом переключателем реверса функции.
Вот если, например, функция крена (AILE) у вашей модели работает не в том направлении, то это говорит о том, что значение ее коэффициента +60% следует заменить на -60%. Тогда все начнет работать правильно, не задевая работы прочих функций управления. Чего, собственно, мы и добивались. По аналогичной схеме следует проделать изменения с теми функциями, которые работают в противоположном требуемому направлении.
Как же быть с обыкновенными радио наподобие WFLY FT-06C?
Основная проблема подобных радио заключается в следующем: в них отсутствует меню SWASH MIX (как и вообще какое-либо меню). В таких радио имеются всего три переключателя реверсов серво и лишь два переключателя SWASH MIX. Погодите, ка это два? Но ведь по количеству функций их должно быть три?
В действительности наличие шести переключателей реверсов является избыточным. Функции недостающего 6-го переключателя для реверса коллективного шага (PIT.) осуществляют при помощи трех переключателей реверсов серво. Как было раньше сказано, из этих трех переключателей можно осуществить 8 комбинаций, четыре из которых являют собой зеркальное отражение четырех остальных. Собственно эта вторая группа из последних четырех комбинаций представляет собой эдакую замену для недостающего 3-го переключателя реверса коллективного шага PIT.
Чтобы настроить подобного рода радио нужно применять все наведенные выше рекомендации, исключая одну из них. Для нас теперь значимо не только то, что при изменении коллективного шага все серво должны двигаться в одном направлении, но и то, что они должны двигаться именно в правильном направлении: при перемещении ручки вверх - тарелка передвигается вверх. Все же остальные настройки останутся аналогичными, а вот для замены знака коэффициента микширования используются два имеющихся переключателя.
Заключение
Теперь можно сделать выводи по всему вышесказанному. Итак, реверсы каналов (серво) несут ответственность за согласованную роботу всех трех серво в группе относительно друг к другу, перемещая их в одном направлении. А вот реверсы функций отвечают за правильное направление перемещений тарелки автомата перекоса с помощью меню SWASH MIX. Уяснив это для себя, Вы за считанные минуты сможете выставлять правильные значения коэффициентов.
Лишь только после того как настроены правильные направления можно приступать к настраиванию исходного положения тарелки автомата перекоса при шаге равном нулю (посередине и горизонтально). Делается это механически, путем подбирания длин тяг и перестановкой качалки на серво. Вот лишь только после этого возможно все довести до идеала, пользуясь функцией Sub Trim. Следует напомнить, что сабтриммеры предназначаются собственно для компенсирования недостатков в механике модели, а именно неточности в подбирании длин тяг и выставлении нейтрального положения качалок. Пользоваться триммерами для данной цели весьма ошибочно. Во первых, положение триммеров в большинстве радио задается независимо в каждом отдельном полетном режиме, именно это и вызывает проблемы. Во вторых, у них совсем иное назначение.
А вот относительно самих значений для каждого коэффициента микширования CCPM, то этот вопрос скорее может стать темой для отдельной статьи. Но в целом значения коэффициентов определяют процент от коллективного хода серво, который будет использоваться для изменения величины коллективного шага, а какой процент - для изменения величины циклического шага. Например, при изменении величины коэффициента для коллективного шага (PIT.), возможно увеличение диапазона углов лопастей главного ротора, не изменяя при этом подобного диапазона для циклического шага, чего нельзя сделать при непосредственной корректировке максимального отклонения (End Point Adjustment, EPA или Travel Adjustment), воздействующей одновременно на все функции. Подобным образом, при увеличении данного коэффициента по элеронам (AILE) увеличиваются углы отклонения сервооси при работе по крену, в результате чего в этом направлении поднимется маневренность. Аналогично все и по тангажу (ELEV).
Читайте также: