
Как управлять радиоуправляемой машиной через компьютер
Обновлено: 06.07.2024
Подскажите пожалуйста, если кто знает. Есть у меня джойстик для управления радиоуправляемой модели с приемником. однако вместо кнопок на пульте джойстика яхочу использовать кнопки моего ноут бука. Это главная цель. [/size]
в какую сторону копать, что читать? Предполагаю некий переходник, вход которого подключается к USB компьютера, выход идет на вход передатчика от джойстика. [/size]
Особо интересуют 2 вопроса: [/size]
1) Что подается на вход передатчика. [/size]
Там несколько каналов. Под каждый канал есть вход. Подать нужно напряжение на канал? Какое напряжение? Как оно подается в зависимости от типа управления (дискретное/ пропорциональное)? Для примера можно взять любой популярный передатчик для авиа моделирования.[/size]
2) Что касается USB. Как программно (мб кто драйвер подскажет?) подать сигал на ножку USB выхода? Далее у USB у нас 4 выхода, на 6 канальный передатчик придется хитро мудрить чтобы передать сигнал (где почитать?). Поэтому хочу начать с простого: LPT порт компьютера. Там выходов много (порядка 20), есть опыт работы с этим портом, делал педаль, подключаемую к компьютеру. [/size]
Итак, задача поменялась. Для каждого входа на передатчик напрямую подсоединю проводок из соответствующего выхода LPT порта. Вопрос остался: что подать на вход передатчика (см.1) [/size]
спасибо, если будут ответы, буду выкладывать здесь результат[/size]
подскажите, будет ли она работать для пропорционального управления? Что нужно допилить?Активный участник форума
А Вам нужно дискретное или пропорциональное?
Ваша схема логическая и будет работать только дискретно.
А Вам нужно дискретное или пропорциональное?
Ваша схема логическая и будет работать только дискретно.
Спасибо за ответ.
Я знаю, что на пультах радиуправления ТОЧНО есть пропорциональные рычажки. Подозреваю, что и дискретные тоже есть. Т.е. в идеале и то, и другое.
Также можно заметить, что любое дискретное управление можно легко заменить пропорциональным (со значением 100%).
Вообще данная схема - просто набор ключей, которые замыкаются и размыкаются. Чтобы реализовать дискретное управление, подозреваю нужно подавать напряжение разной величины на необходимый канал. Вопрос состоит в том,
1) какое должно быть напряжение.
Решить можно так:
Раз у меня есть пульт управления, просто разбираю, включаю, и измеряю вольтметром сколько он подаёт при отклонении рычажка.
2) Посложнее, как можно регулировать подачу напряжение, используя данную схему?
Пока я слабо разбираюсь в технике и совершенно не знаю как изменить схему, что впаять и т.д.
Тема раздела Авто. Общий в категории Автомодели; Возможно, кто-то уже занимался. Необходимо управлять радио машинкой с помощью компьютера (руль с педалями).
Опции темы
Управление радио машинкой с компьютера
Возможно, кто-то уже занимался. Необходимо управлять радио машинкой с помощью компьютера (руль с педалями).
Руль и педали. А зачем для этоко компьютер? Разбераешь пульт, на руль и педали ставишь резюки от пульта. На машину цепляешь камеру с передатчиком. Приемник от камеры цепляешь к телику. И в перед.
Какое время назад, лет этак пять назад в нете видел такой девайс. На автомодель ставиться камера, подключается к компьютеру, на экран выводится картинка, а машина управляется с помощью джойстика (руль и педали). Разработчики этого устройства россияне. Потом еще хотел найти этот же сайт, но безуспешно!
Может кто-нибудь встречал подобные вещи.
Думаю что проблем с таким девайсом (сделать) проблем быть не должно, если есть переходник ппм в джойстик то и наоборот должно быть без проблем. но за ненадобностью 99,99. % людей думаю их никто не выпускает.
и гораздо проще сделать как предложил Y@N. проблем с таким подходом точно не будет.
хотя сомнительное удовольствие рулить рс с помошью руля и педалей, и особенно удобно маршалить для себя любимого.
Как сделаешь выклади фотки.
Это не новая идея и обсуждалась не однократно.
Но зачем вам педали и руль . вы же потеть будите (джойтиком проще - нужны доказательство - в лс.)
А вы уверены, что управлять машинкой "сидя в ней" проще . Может на ПК гонках да, но здесь есть большой минус: тряска и новое знакомство с той же трассой, да и скорость круче чем "FlatOut2" Flatmobile . ну не знаю . кому как ! Лично я для себя убедился, что это полный отстой - заблудится не просто, а очень просто . Надо несколько камер, чтоб и в зеркала смотреть
P.S. Фотка вековой давности.
Blaster прав, управлять будет трудно. У таких камер угол обзора 45-60 градусов. Сам недавно в магазине смотрел.***полный отстой - заблудится не просто, а очень просто *** Позавчера пробовал на машику камеру на открытой площадке. Если в камеру не попадает корпус машины , то весьма некомфортно. Видно мало, дистанция не чуствуется, ориентиры ввиде окружающих деревьев, зданий, машин видно плохо - блин умом понимаю что нечего бояться - но потеря ориетации действительно есть.. Хотя если постоянно на одной и той же трассе - то можно привыкнуть.
Ps а на трассе еще можно и знаков наставить - типа поворот - трамплин - скорость и прочее
Точно ! Идея люкс. А потом ещё и штурмона попросить !
Не, в общем было бы прикольно. Как я до токого не догодался
Но ребята без камер будут ехать всё равно быстрея . да и сам тоже. Тогда вопрос другой : - в чём прикол ?
А можно поконкретнее:
Какая машина?
Какое дорожное покрытие и где? Двор? Парковка?
Какая камера?
Очки / мини телик?
Как ведется борьба с вибрацией?
С уважением,
Сергей.
З.Ы. Да, забыл: какая камера?
Не забыл.. Про камеру два раза спросил.
История развивается по спирали. Завораживает сама идея в реальности создать прообраз компьютерной игрушки, симулятор виртуальности.
Сначала удешевляем колбасу, что бы повысить ее конкурентноспособность, потом ищем ингридиенты, способные смоделировать вкус натуральной колбасы, на выходе получаем колбасу, по вкусу и цене напоминающую натуральную. А зачем?
Не забыл.. Про камеру два раза спросил.
История развивается по спирали. Завораживает сама идея в реальности создать прообраз компьютерной игрушки, симулятор виртуальности.
Сначала удешевляем колбасу, что бы повысить ее конкурентноспособность, потом ищем ингридиенты, способные смоделировать вкус натуральной колбасы, на выходе получаем колбасу, по вкусу и цене напоминающую натуральную. А зачем?
Ну, связывать это все с компом - это лишнее ИМХО. Поставить камеру с передатчиком и просто кататься, смотря преимущественно на какой-нить дисплейчик. Конечно, ни о каких гонках и речи быть не может Просто покатушки.
У авиаторов своя ветка есть на эту тему, вот и подумал, может, и сдесь кто-то пробовал. По принципу: чем мы хуже? Так, что просто прощупываю почву
Тем более вижу пока "всего" две проблемы:
-вибрация, которая на самолете меньше;
-расположение камеры + защита ее от пыли/грязи.
Со вторым знаю как бороться, а вот с первым - увы, нужен опыт. Плюс, простите, дофига проблем вылезет
С уважением,
Сергей.
З.Ы. Прошу прощение, за то, что повторяюсь.
З.З.Ы. А модели - не попытка создать в нашей реальности реальность другую? Также, как книги, кино и т.д.
Этот урок показывает как сделать радиоуправляемую модель машины, которую можно контролировать через смартфон. В этом руководстве мы будем использовать плату Arduino Uno.

Шаг 1. Комплектующие
Для того, чтобы сделать модель машины на радиоуправлении (RC-машина) с использованием Ардуино и с возможностью контроля через смартфон, нам понадобятся следующие детали:
- Комплект шасси робота 4WD
- Модуль H-моста LM298
- Модуль Bluetooth HC-05
- Батарея Li-po 12В
- Провода-перемычки
- Провода "папа-папа"
- Клейкая лента или любая другая лента
- Смартфон
Шаг 2. Шасси


Вы можете купить готовый комплект для сборки 4WD шасси или сделать его с помощью ПВХ или любого вида жесткой доски. Наш вариант на фото выше был куплен в онлайн-магазине. Вполне возможно сделать аналог этого шасси своими руками. Не имеет особого значения вид шасси, можно выбрать на свой вкус.
Шаг 3. Моторы (приводы)

В этом проекте используются 6В моторы постоянного тока. Вы можете использовать любой вид приводов на 6В постоянного тока. После того как вы купили моторы, нужно их подготовить перед размещением на шасси.

Отрежьте 4 кусочка красного и черного провода длиной примерно от 5 до 6 дюймов (12 - 15 см). Можно использовать провода 0,5 мм. Снимите изоляцию с проводов на каждом конце. Припаяйте провода к клеммам двигателей.

Вы можете проверить полярность двигателя, подключив его к батарейному блоку. Если он вращается в прямом направлении (красный провод с положительного и черный провод с отрицательного вывода батареи), то соединение правильное.

Шаг 4. Установка двигателей




Следуйте фотографиям выше для того, чтобы понять как установить все двигатели на шасси нашей будущей модели радиоуправляемой машины, которую мы будем контролировать со смартфона.
Шаг 5. Ардуино контроллер
Arduino UNO - это плата микроконтроллера с открытым исходным кодом, основой которой служит микроконтроллер Microchip ATmega328P и разработанная Arduino.cc.
Плата оснащена наборами цифровых и аналоговых пинов ввода/вывода (I/O), которые могут быть подключены к различным платам расширения (экранам) и другим цепям. Плата имеет 14 цифровых контактов, 6 аналоговых контактов и программируется с помощью Arduino IDE (интегрированная среда разработки) через USB-кабель типа B. Плата может питаться от USB-кабеля или от внешней 9-вольтовой батареи, хотя он принимает напряжение от 7 до 20 вольт, по аналогии с Arduino Nano и Leonardo.

Эталонный дизайн оборудования распространяется под лицензией Creative Commons Attribution Share-Alike 2.5 и доступен на веб-сайте Arduino. Макет и производственные файлы для некоторых версий оборудования также доступны. «Uno» означает один на итальянском языке и был выбран в честь выпуска Arduino Software (IDE) 1.0. Плата Uno и версия 1.0 программного обеспечения Arduino (IDE) были эталонными версиями Arduino, теперь разработанными для более новых выпусков.
Плата Uno является первой в серии плат Arduino c USB и эталонной моделью для последующих платформ. ATmega328 на Arduino Uno поставляется с предварительно запрограммированным загрузчиком, который позволяет загружать новый код без использования внешнего аппаратного программера с использованием оригинального протокола STK500. Uno также отличается от всех предыдущих плат тем, что не использует микросхему драйвера FTDI USB-to-serial. Вместо этого он использует Atmega16U2 (Atmega8U2 до версии R2), запрограммированный как преобразователь USB-to-serial.
Микроконтроллеры обычно программируются с использованием диалекта функций из языков программирования C и C++. В дополнение к использованию традиционных наборов инструментов компилятора проект Arduino предоставляет интегрированную среду разработки (IDE).
Шаг 6. H-мост (модуль LM 298)

Термин H-мост (англ. H-bridge) выведен из типичного графического представления такой схемы. Это схема, которая может приводить двигатель постоянного тока в прямом и обратном направлении, см. рисунок выше для понимания работы H-моста.
Он состоит из 4 электронных переключателей S1, S2, S3 и S4 (транзисторы / МОП-транзисторы (MOSFET) / IGBTS). Когда переключатели S1 и S4 замкнуты (а S2 и S3 разомкнуты), на двигатель идет положительное напряжение. Поэтому он вращается в прямом направлении. Аналогично, когда S2 и S3 замкнуты, а S1 и S4 открыты, обратное напряжение идет через двигатель, поэтому он вращается в обратном направлении.
Примечание. Переключатели в одном и том же плече (S1, S2 или S3, S4) никогда не замыкаются в одно и то же время, это приведет к короткому замыканию.H-мосты доступны в виде интегральных микросхем, или вы можете создать свой собственный, используя 4 обычных транзистора или полевых транзистора (MOSFET). В нашем случае мы используем микросхему H-моста LM298, которая позволяет контролировать скорость и направление вращения двигателей. Ниже перейдем к описанию пинов:
Выход 1: двигатель постоянного тока 1 "+" или шаговый двигатель A+
Выход 2: двигатель постоянного тока 1 "-" или шаговый двигатель A-
Выход 3: двигатель постоянного тока 2 "+" или шаговый двигатель B+
Выход 4: двигатель B выведен
12В контакт: 12В вход, но вы можете использовать от 7 до 35 В
GND: земля
Вывод 5В: выход 5 В, если перемычка 12 В на месте, идеально подходит для питания вашего Arduino
EnA: включает сигнал ШИМ для двигателя А
IN1: включить двигатель A
IN2: включить двигатель A
IN3: включить двигатель B
IN4: включить двигатель B
EnB: включает сигнал ШИМ для двигателя B
Шаг 7. Источник питания

Для нашей радиоуправляемой модели машины на основе Ардуино и с контролем через смартфон могут быть использованы следующие батареи:
- Щелочная батарея типа АА (не перезаряжаемая)
- AA NiMh или NiCd аккумулятор
- Литий-ионный аккумулятор
- Батарея LiPo
Шаг 8. Электрические соединения
Для реализации соединений нужны перемычки. Соедините красные провода двух двигателей (с каждой стороны) вместе и черные провода вместе. Таким образом у нас теперь есть два терминала с каждой стороны. MOTORA отвечает за два правых двигателя, соответственно два левых двигателя подключены к MOTORB. Следуйте инструкциям ниже, чтобы соединить все.
Соединения двигателей
Out1 -> Красный провод левого бокового мотора (+)
Out2 -> Черный провод левого двигателя (-)
Out3 -> Красный провод правой стороны двигателя (+)
Out4 -> Черный провод правой стороны двигателя (-)
LM298 -> Arduino
Модуль Bluetooth -> Arduino
Питание
12V -> Подключите красный провод аккумулятора
GND -> Подключите черный провод аккумулятора и вывод Arduino GND
5V -> Подключение к контакту Arduino 5V
Шаг 9. Логика управления
Логика управления описывается в таблице ниже.

Шаг 10. Приложение для смартфона


Для управления RC-автомобилем мы используем смартфон. Смартфон подключается к контроллеру через модуль Bluetooth (HC-06/05). После установки приложения необходимо настроить связь с модулем Bluetooth. Пароль для связи: «1234».
Шаг 11. Код Ардуино

Шаг первый: изготовление платы
Сначала мастер спроектировал печатную плату используя программу Autodesk Eagle.Эта программа представляет собой программу САПР, специально разработанную для проектирования печатных плат. Это программное обеспечение бесплатно для двусторонних плат до 80 см², что вполне достаточно для любителей.


Можно изготовить плату самостоятельно, а можно заказать ее на PCBWAY



.
Шаг второй: монтаж платы
Дальше мастер приступает к монтажу платы.
В схеме есть SMD-компонент (AMS1117 5V) и сначала нужно припаять его.




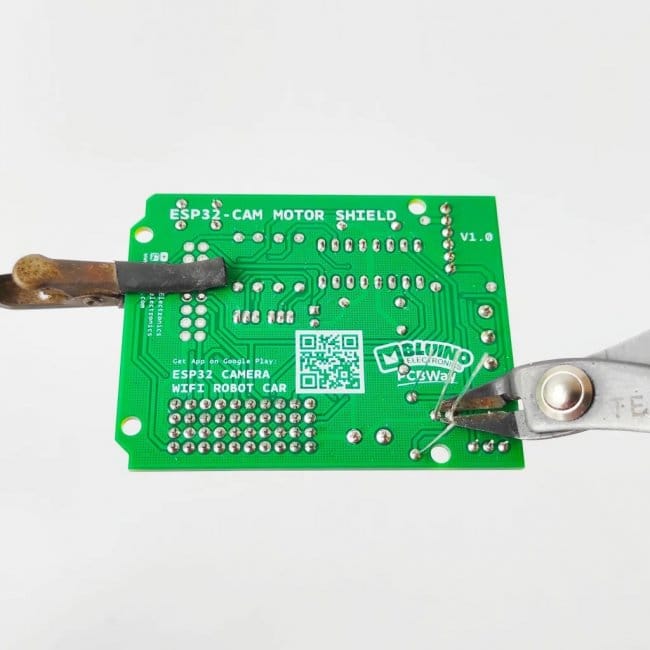



Сгибает ножки длинного разъема и вставляет его в другой разъем. Фиксирует их суперклеем. Затем вставляет разъем в припаянный ранее и устанавливает ESP32-Cam.








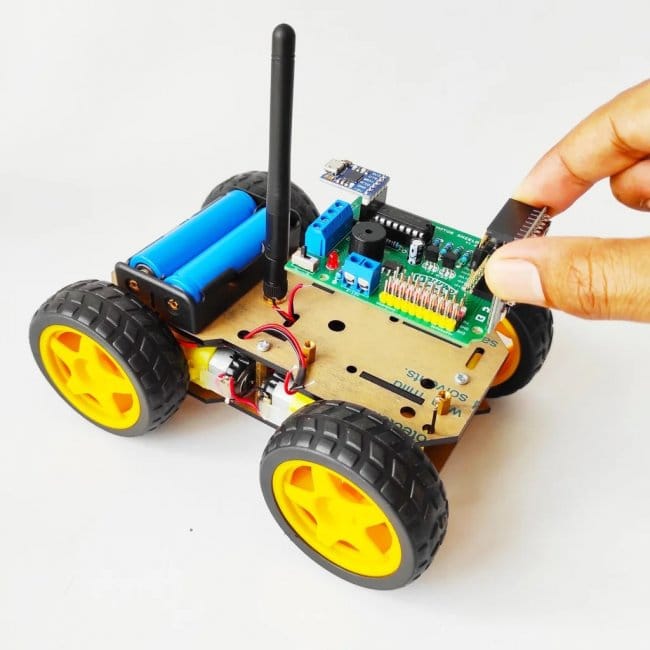
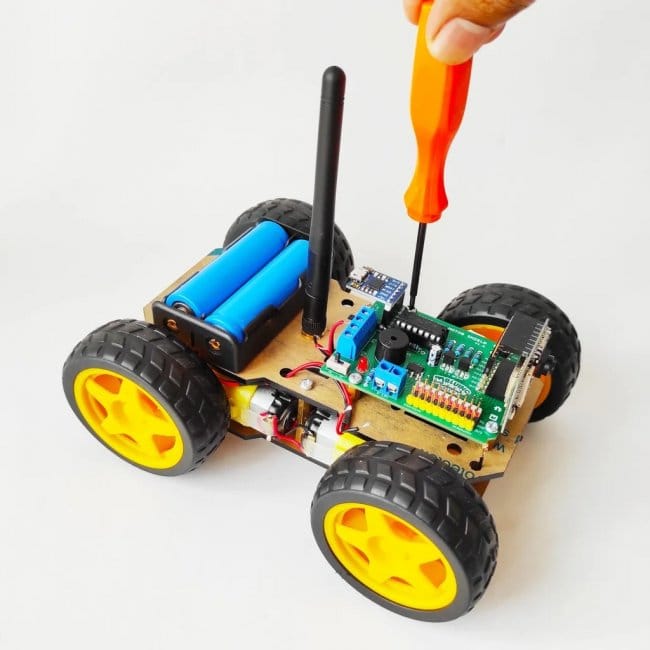
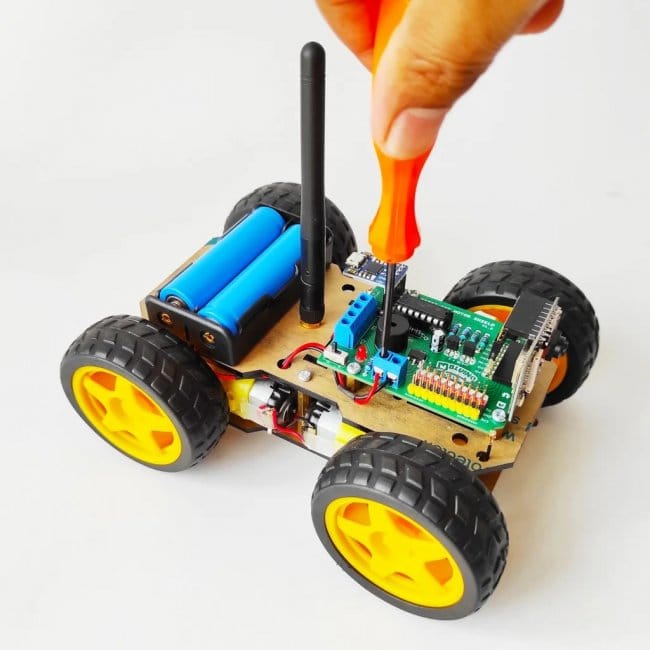
Шаг третий: сборка машинки
Можно использовать любое нестандартное шасси, которое есть у пользователя. Печатная плата материнской платы имеет ту же форму и размер, что и Arduino Uno , поэтому подобрать шасси не сложно.
Левый и правый двигатель подключает к винтовым клеммам на выходе драйвера двигателя материнской платы. Подключает батарею к плате.

Шаг четвертый: программирование
Чтобы машиной можно было управлять с помощью смартфона Android, нужно сначала запрограммировать ESP32-Cam. Нужно выполнить следующие действия:
Установите ESP32 Camera WiFi Robot Car из Google Playstore
Откройте приложение, в строке меню выберите diagram и Code icon.
Выберите настройки меню, в параметре option Motor Driver выберите ESP32-Cam Motor Shield, в параметре «Upload Firmware» выберите «USB OTG». Для подключения Wi-Fi автомобиля к сети маршрутизатора, нужно установить имя SSID и пароль. Подключите ESP32- Cam Board к вашему смартфону используя адаптер USB OTG.
Для подготовки к загрузке удерживая переключатель GPIO0, нажмите кнопку сброса настроек.
На последнем этапе кликните значок загрузки и дождитесь ее завершения.
После завершения загрузки программы нажмите кнопку сброса.
Можно запрограммировать плату ESP32-Cam через компьютер с помощью программного обеспечения Arduino IDE, используя эскизы ниже:
эскиз нужно сохранить как "esp32cam_wifi_robot_car_l293d.ino"
Сохраните эскиз ниже как "app_httpd.cpp"



Все готово, а более подробно о самоделке можно посмотреть на видео ниже.
Читайте также: